
基于计算机视觉的运动员错误动作识别模型构建及仿真
2018-06-22 02:59:28高亮
微型电脑应用 2018年6期
高亮
(榆林学院, 榆林 719000)
0 引言
近年来,在我国计算机图像处理技术的推动下,计算机视觉特性解析以及图像处理技术被广泛应用于人体结构分析中,能够对人体在运动时各类形体进行解析。在此背景下,体育领域也开始引入计算机视觉特性解析技术至运动员动作识别及纠正中,以此提高运动员训练有效性及判断性。计算机视觉技术在进行运动员动作识别时,主要利用视觉特征提取法进行运动员有效动作识别,并以此对该动作准确度进行评估。在运动员错误动作识别方面,主要采用三维视觉检测建模法形成运动员错误动作三维视觉判别函数,从而构建起运动员错误动作三维视觉检测模型,以此对其运动过程错误动作进行评估。由于运动员错误动作评估关系着我国体育事业的发展,因此受到业内人士重点关注研究,并且已有部分研究已取得一定成果。
1 动作特征提取
1.1 基于三维坐标体系的坐标点的确立
自选南拳这一运动比赛通常在地毯上举行,单练以及对练主要在长为14 m,宽为8 m的场地上进行。假设自选南拳运动场地起点角为原点(0,0);长为x轴;高为z轴,则x0=14 m;y0=8 m。根据运动员在自选南拳运动中腾空动作的高度,设三维坐标系中的z0=5 m,刻度为1 m,从而构建起运动员三维坐标系,具体三维坐标系,如图1所示。
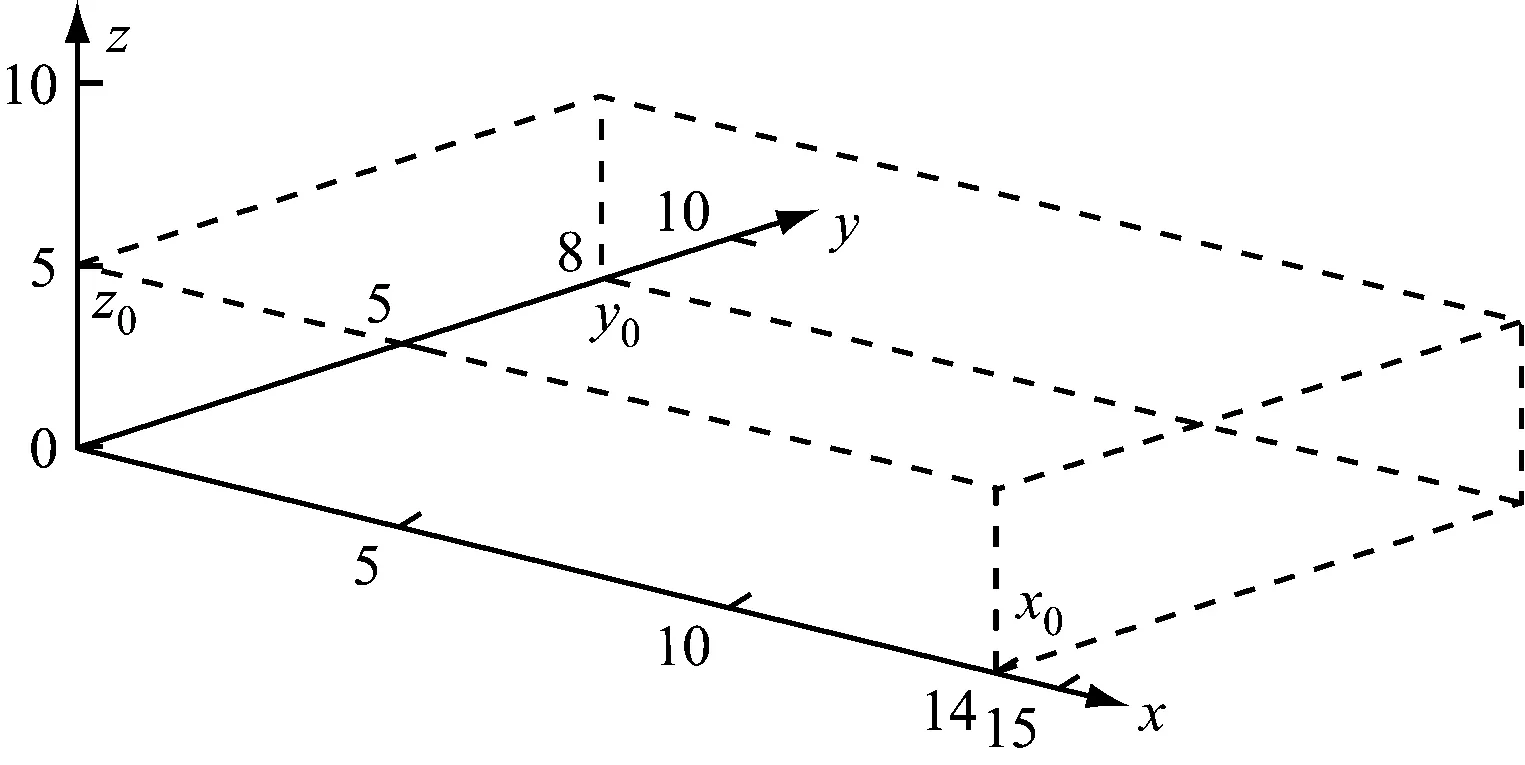
图1 三维坐标系
1.2 基于三维坐标的运动员特征的描述
在对自选南拳三维坐标运动员动作特征描述方面,本文将以运动员腾空飞脚动作规则相关要求作为基础,采用三维坐标点对该运动员腾空飞脚所用到的关键关节部位进行标记,具体标记过程如下:
1) 肩膀的坐标点
假设运动员身体左边标记为l,右边身体标记为r。那么该运动员左肩膀坐标点则为(x1jb,y1jb,z1jb);右肩膀坐标点为(xrjb,yrjb,zrjb)。
2) 手指的坐标点
运动员在进行腾空飞脚运动时,主要以五指并拢的形式击拍某一部位。此时,该运动员手指关节将合拢成为一个平面。假设将坐标点(xsz,ysz,zsz)代表运动员关节平面中任一点坐标;左手指坐标点则为(x1sz,y1sz,z1sz);右手指标点为(xrsz,yrsz,zrsz)。
3) 脚尖的坐标点
由于研究需要,此处将不对运动员各脚趾脚尖坐标点进行分别设立,仅将其左脚脚尖坐标点看作(x1jj,y1jj,z1jj);右脚脚尖坐标点看作(xrjj,yrjj,zrjj)。
4) 脚面的坐标点
根据以上阐述,将运动员左脚脚面坐标设置为(x1jm,y1jm,z1jm);右脚脚面坐标设置为(xrjm,yrjm,zrjm)。
1.3 基于三维坐标的运动员特征的描述
在体育运动员进行动作训练时,动作的正确与否不仅关系着当前阶段的练习关节,更会给运动员动作训练前阶段以及后阶段造成一定的影响。比如,在运动员进行跳高练习时,处于跳高弧线助跑阶段的运动员身体若是过早的直立,将会使其在起跳前身体失去平衡而倒向横杆。根据武术动作套路以及自选南拳运动评分规则可以了解到,运动员腾空飞脚应有的正确动作步骤为:首先,借助左腿向前向上摆踢,使右腿蹬地跃起,帮助身体达到腾空状态;其次,左右两臂由下向前再上摆起,右手手背与左手手掌相击,在空中右脚向前上方弹踢。此时必须保持将右脚高度高于腰部,并且将脚面绷直与右手相击。同时做出左腿屈膝,左腿收控至右腿侧,脚面绷直,脚尖朝下这一连贯动作;最后,在上述动作完成之后,运动员还需以右腿单腿着地后,左腿再落地作为结尾动作。在运动员进行整体动作过程中,若是出现腾空飞脚击响腿、摆动腿脚尖未过肩或是腾空飞脚击拍落空的情况,出现一次直接扣减0.1分。本文对三维坐标运动员运动特征描述过程如下:
(一) 运动员腾空飞脚击响腿或摆动腿脚尖未过肩设为u1
设武术套路南拳腾空飞脚动作为U1;设运动员腾空飞脚击响腿或摆动腿为s1;运动员腾空飞脚动作特征T1=左脚脚尖的坐标(x1jj,y1jj,z1jj),右脚尖坐标点(xrjj,yrjj,zrjj),左肩膀坐标点(x1jb,y1jb,z1jb),右肩膀坐标点(xrjb,yrjb,zrjb)。在三维坐标系中,可通过将运动员脚尖与肩膀在z轴坐标点进行比较的方式,求出该运动员腾空飞脚动作过程是否出现击响腿或摆动腿脚是否过肩失误。
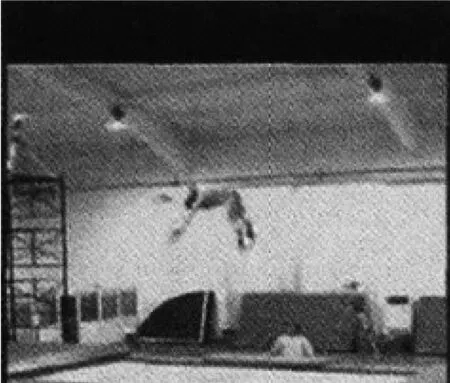
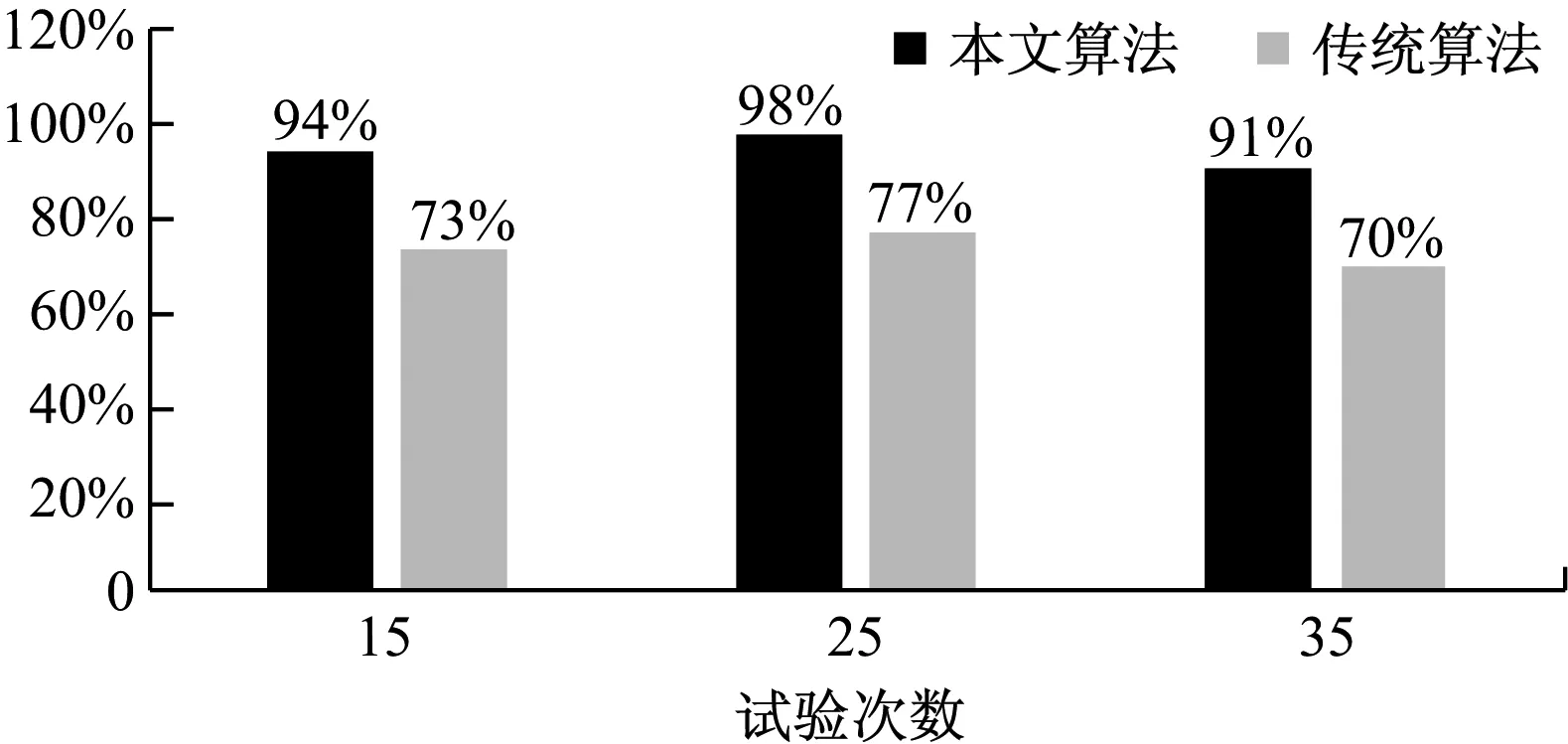
(1) 当腾空飞脚击响腿或摆动腿是左腿时,已知运动员左脚脚尖坐标为(x1jj,y1jj,z1jj);右肩膀坐标点为(x1jb,y1jb,z1jb),那么当出现z1jj (2) 当腾空飞脚击响腿或摆动腿是右腿时,已知右脚脚尖坐标表达式为(xrjj,yrjj,zrjj),右肩膀坐标点表达式为(xrjb,yrjb,zrjb)。当出现zrjj (二) 运动员腾空飞脚击拍落空设为u2 武术套路南拳腾空飞脚动作设为U2;设运动员左手与右手为s2;运动员腾空飞脚动作特征T2=左手指坐标点(x1sz,y1sz,z1sz),右手指坐标点(xrsz,yrsz,zrsz),左脚脚面坐标点(x1jm,y1jm,z1jm),右脚脚面坐标点(xrjm,yrjm,zrjm)。 (1) 当腾空飞脚击响腿或摆动腿是左腿时,在已知运动员左手指标点以及左脚脚面坐标点分别为(x1sz,y1sz,z1sz)以及(x1jm,y1jm,z1jm)情况下,根据运动员腾空飞脚击拍动作规则,在其腾空飞脚脚击响瞬间T1时刻时,当出现x1sz≠x1jm,y1sz≠y1jm,z1sz≠z1jm时,则表示该运动员腾空飞脚击响动作落空;若是出现x1sz=x1jm,y1sz=y1jm,z1sz=z1jm时,则表示其腾空飞脚击响动作顺利完成。 (2) 当腾空飞脚击响腿或摆动腿是右腿时,已知运动员右手指坐标点及右脚脚面坐标点的表达式分别为(xrsz,yrsz,zrsz)与(xrjm,yrjm,zrjm)时,当出现xrsz≠xrjm,yrsz≠yrjm,zrsz≠zrjm时,则代表运动员腾空飞脚击响未成功;若是出现xrsz=xrjm,yrsz=yrjm,zrsz=zrjm时,则表示运动员顺利完成腾空飞脚击响动作。 本文在进行运动员错误动作三维视觉图像识别模型构建时,将以上文中所提出的运动员错误动作描述公式作为依据,并以此获取运动员动作识别属性,得出错误动作三维视觉判别函数,从而构建起体育运动错误动作的三维视觉检测模型。对此本文通过贝叶斯算法对错误动作进行识别,具体构建步骤如下: (1) 假设腾空飞脚运动错误动作的后验条件概率表示为p(ωi|X),并将此条件概论定义于掌握腾空飞脚动作模式向量X发生情况之下,对当前帧中运动员腾空飞脚错误运动动作发生的后验条件概率计算公式则为式(2)。 (2) 在公式(4)中,p(ωi|X)所表示的是运动员腾空飞脚运动动作模式向量X以及ωi的似然函数,也就是代表着X于ωi上的发生概率;ωi的运动动作先验概率以P(ωi)进行表示;运动员腾空飞脚错误运动动作发生的证据因子由p(X)表示。p(X)的计算公式为式(3)。 (3) 若是di(X)值为最大的情况时,则把运动员腾空飞脚动作模式向量X划分于di(X)中。并以公式(6)构建起腾空飞脚运动错误动作的三维视觉检测模型为式(4)。 (4) 为了验证上文中所提出的腾空飞脚运动错误动作三维视觉检测建模方法的科学性及有效性,本文将采用某体育学院训练腾空飞脚的18学生作为实验对象,并将这18名学生平均划分为两个实验小组的方式,对其进行腾空飞脚考试实验记录,以此作为依据对腾空飞脚错误动作三维视觉检测建模方法进行验证。具体验证结果,如图2和图3所示。 在图3中,左侧图像表示腾空飞脚正确动作,右侧表示腾空飞脚错误动作。根据图2显示内容可以看出,运动员在进行腾空飞脚时,所涉及的头部、肩部、手臂以及腿部的错误动作均能明显识别,与正确动作具有较高的吻合度。而图3中运动员动作则出现较大偏差。此结果足以说明本文提出的腾空飞脚错误动作的三维视觉检测模型对识别运动员腾空飞脚错误动作具有实际意义。 与此同时,本文还将在此验证基础上采用两种不同算法建立起三维视觉检测模型,并在不同实验次数下对两种模型的精确度进行对比,具体对比结果,如图4所示。 根据图4所示可以看出,本文所提出的算法在三维视觉检测精度方面更具优势,能够将检测误差控制到合理范围内。 通过上述的研究看出,本文提出的算法在判断腾空飞脚错误动作时,其判断的正确率要明显高于传统的算法,进而验证贝叶斯算法在识别错误动作方面具有明显的优势,进而验证上述方法的可行性与正确性。 图4 模型检测精度对比 [1] 于淼. 基于行为视觉分析的运动角度规范性智能判断[J]. 科技通报,2015,31(12):199-201. [2] 刘凌霞,宋强. 基于三维动态特征的运动状态识别方法研究[J]. 微电子学与计算机,2016,33(2):92-95+99. [3] 张良,鲁梦梦,姜华. 局部分布信息增强的视觉单词描述与动作识别[J]. 电子与信息学报,2016,38(3):549-556. [4] 刘和臣. 运动员动作三维视觉图像准确识别仿真研究[J]. 计算机仿真,2016,33(8):369-372+386. [5] 张嫣. 基于视觉分析的篮球投篮动作标准化判断方法研究[J]. 现代电子技术,2017,40(3):47-50. [6] 季刚,张南. 多特征光流跟踪人体关节点的运动员姿态分析模型[J]. 科技通报,2017,33(12):133-136. [7] 高保华. 基于图像分析的体操落地稳定性分析[J]. 现代电子技术,2017,40(5):66-69. [8] 汪成峰,王庆,梅树立,等. 基于插值小波关键帧提取的动作评价算法[J]. 计算机工程,2017,43(1):309-315. [9] 司幸伟. 基于多尺度形态学图像的屈肘角度检测方法与实现[J]. 河南师范大学学报(自然科学版),2017,45(5):60-67. [10] 安秀芳. 三维散乱人体运动点的激光跟踪技术研究[J]. 激光杂志,2017,38(11):152-155. [11] 阮涛涛,姚明海,瞿心昱,等. 基于视觉的人体运动分析综述[J]. 计算机系统应用,2011,20(2):245-253. [12] 雷建和,邱联奎,宋全军,等. 运动员生物力学信息获取平台的研究[J]. 传感技术学报,2006(2):332-336. [13] 夏瑜,吴小俊,王洪元. 双环Mean Shift视频跟踪算法[J]. 模式识别与人工智能,2013,26(1):20-27. [14] 郭利,姬晓飞,李平,等. 基于混合特征的人体动作识别改进算法[J]. 计算机应用研究,2013,30(2):601-604. [15] 罗陆锋,邹湘军,张丛,等. 基于实时数据的角色运动建模与仿真[J]. 系统仿真学报,2015,27(4):677-681. [16] 江山. 基于形体轮廓特征提取的运动动作标志分析[J]. 科技通报,2015,31(8):84-86. [17] 邓宇,李振波,李华. 基于视频的三维人体运动跟踪系统的设计与实现[J]. 计算机辅助设计与图形学学报,2007(6):769-774.2 基于贝叶斯的错误动作三维视觉检测

3 仿真结果与分析

4 总结
 猜你喜欢
小天使·一年级语数英综合(2022年2期)2022-03-30 16:18:14边疆文学(2020年5期)2020-11-12 02:29:46武术研究(2020年4期)2020-04-28 02:17:32作文与考试·小学高年级版(2015年7期)2015-05-30 10:48:04人生十六七(2015年29期)2015-02-28 13:09:01黑龙江工业学院学报(综合版)(2014年6期)2014-03-31 17:03:01短篇小说(2014年11期)2014-02-27 08:32:41赤峰学院学报·自然科学版(2013年21期)2013-04-02 19:51:52高中生·青春励志(2009年11期)2009-12-03 08:25:12知识窗(2009年5期)2009-06-23 07:07:18
猜你喜欢
小天使·一年级语数英综合(2022年2期)2022-03-30 16:18:14边疆文学(2020年5期)2020-11-12 02:29:46武术研究(2020年4期)2020-04-28 02:17:32作文与考试·小学高年级版(2015年7期)2015-05-30 10:48:04人生十六七(2015年29期)2015-02-28 13:09:01黑龙江工业学院学报(综合版)(2014年6期)2014-03-31 17:03:01短篇小说(2014年11期)2014-02-27 08:32:41赤峰学院学报·自然科学版(2013年21期)2013-04-02 19:51:52高中生·青春励志(2009年11期)2009-12-03 08:25:12知识窗(2009年5期)2009-06-23 07:07:18
