基于北斗短报文通信的无人机安控系统
2018-06-21 00:54:52陶德桂刘关心
电光与控制 2018年6期
陶德桂,刘关心
(中国人民解放军92419部队,辽宁 兴城 125106)
0 引言
国产某无人机体型大、速度快、航程远、自重大,其所使用的部件可靠性不高,某些关键部件的使用寿命较短,容易出现故障,导致该无人机在使用过程中存在较大的安全隐患,如果不采取一定的安全控制措施,势必会在飞行过程中失去控制,一旦坠落地面或海上,将对周边区域的人员生命和财产安全构成很大的威胁,如果飞出国境线外,则可能引发政治事件,造成恶劣的政治影响。因此,其飞行安全控制备受使用单位和生产厂家的高度关注和重视。
随着科技的进步和该无人机的不断升级改造,该无人机目前已具备了依赖GPS定位信息的安控区域自主判断和执行安控的功能,但当遥控系统或者其他部件出现故障且需要及时控制无人机完成自毁功能时,安控措施仍显不足。为此,建设了一套基于北斗短报文通信的无人机安控系统,并将靶载安控器加装于该型无人机上配合飞控系统实现快速自毁功能,摆脱了对GPS的依赖和遥控作用距离不够的限制,为特殊情况的处置提供了另外一条可靠途径。
1 总体方案设计
该型无人机原有机载安控器主要由安控CPU卡和安控GPS模块组成,可以实时采集无人机位置信息,根据安控策略完成安控状态判断,当无人机飞出由凸多边形围成的安控区域时,自主执行安控,控制无人机坠毁。其组成如图1所示。

图1 无人机飞控计算机系统组成Fig.1 Composition of UAV flight control computer system
原有机载安控器只具有自主安控功能,不能实现及时被动安控功能;虽采用双GPS冗余备份,但信息源单一,易受干扰;集成在飞控计算机内部,共用电源模块,易与飞控计算机系统相互干扰。
针对原有机载安控器功能上存在的上述不足,研制基于北斗短报文通信的独立BD安控系统[1-3],该系统由机载BD安控器、蓄电池以及地面北斗便携站组成,系统结构组成如图2所示,图中,实线区域部分为原无人机部分机载设备,虚线区域部分为新增加的机载BD安控设备。

图2 BD安控系统组成及连接Fig.2 Composition and connection of BD safety control system
独立BD安控系统的工作原理为:当无人机出现异常情况需要及时坠毁时,由地面北斗便携站向机载BD安控器中的北斗SIM卡发送表示“安控坠毁”指令的短报文信息,经由北斗卫星系统转发后被机载BD2/GPS OEM板接收,并输出给安控CPU板,安控CPU板经解码并确认指令后,输出高电平到电门盒,电门盒中的继电器动作从而断开舵机电磁离合器,致使无人机的升降舵面处于自由状态,其在坠毁弹簧的作用下变为正的最大舵面,从而使得无人机低头、快速坠毁,实现被动安控功能。
考虑到北斗短报文通信的传输成功率和传输延时[4],在发送北斗短报文指令时采用指令字节连续重复3次组帧,每条指令按北斗SIM卡发送频度间隔时间连续发送3次,解码时采用3判2的原则确认是否收到指令;地面北斗便携站采用2台以上同时工作的方式,可有效提高短报文指令发送频度,提高北斗短报文通信的传输成功率,减少指令接收时延。
由于BD2/GPS OEM板能同时提供无人机的实时位置信息[5],因此可替代原来自主安控功能中的单一GPS定位信息源,摆脱对GPS的依赖。
2 具体实现方法
2.1 地面北斗便携站硬件设计
地面北斗便携站的主要功能是向指定编号的北斗SIM卡发送事先约定好的短报文指令信息,同时也具有自检功能,检测北斗卫星信道通信状态。
硬件上采用加固便携式计算机作为主设备,同时将BD2/GPS OEM 板卡加装于便携式计算机内部,为了防止便携式计算机软件故障甚至主板故障导致无法发送短报文指令,便携式计算机内部还集成了一块单独供电、单独运行的嵌入式单片机板卡提供硬件一键发送安控指令功能,一键发送按钮位于便携站键盘右上角,并带有保护罩以防止意外触碰。
地面北斗便携站硬件结构连接如图3所示。
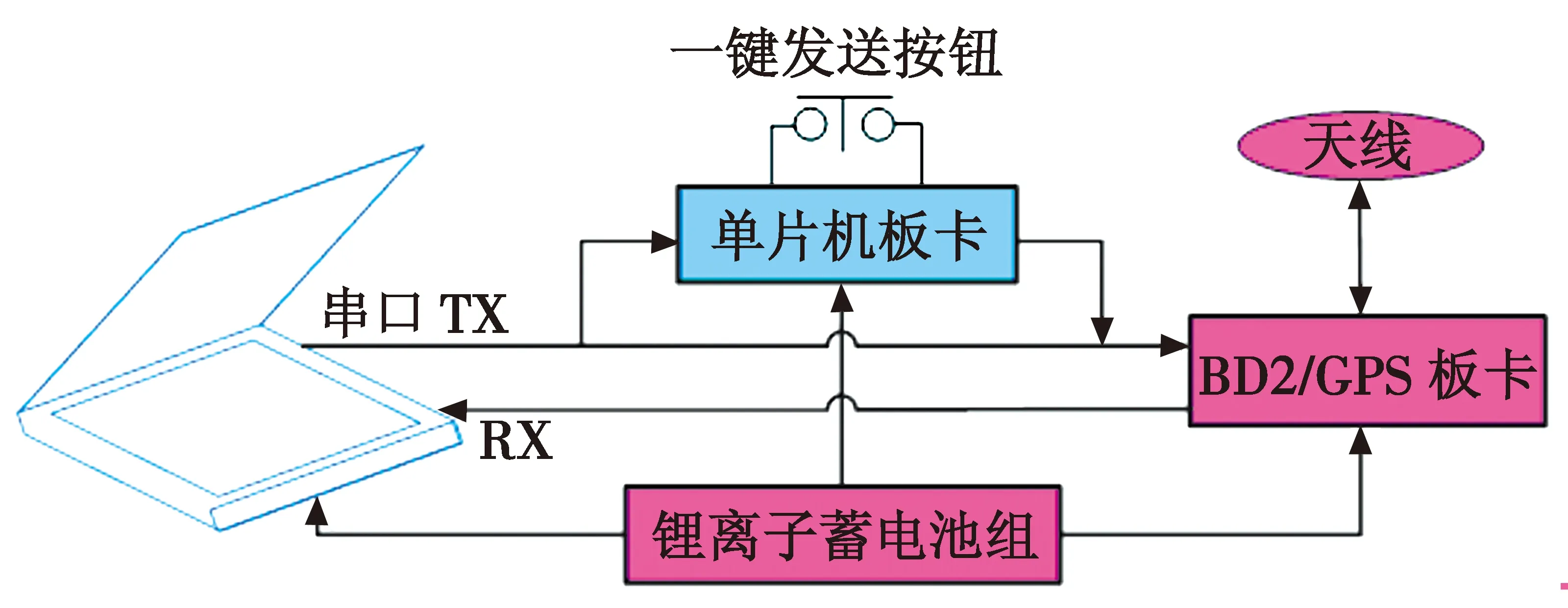
图3 地面站硬件连接示意图Fig.3 Hardware connection of the ground station
其中,便携式计算机的串口发送端TX由单片机板卡和BD2/GPS板卡共享。单片机板卡和BD2/GPS板卡通过数据帧头判断便携式计算机发送数据的目的地址,便携式计算机和单片机板卡分时给BD2/GPS板卡发送数据。
单片机板卡选用STC15L2K08S2作为主芯片辅以少量的外围电路[6]。该单片机工作电压为3.3 V,有2个串口资源,8 kByte Flash程序存储器,2 kByte SRAM,53 kByte EEPROM及26个IO口等硬件资源,可实现北斗SIM卡号的在线加注及掉电保存、短报文指令的自动生成、指令一键发送等功能。
BD2/GPS板选用OEM双模板卡,支持RNSS基本功能及RDSS短报文通信与位置报告功能,采用三级民用插卡式北斗SIM卡,短报文发送频度为1 次/min,短报文的通信时延约3~4 s,发送内容一次最多120个汉字或者1680 bit。
2.2 地面北斗便携站软件设计
地面北斗便携站软件运行在Windows7环境中,主要用于接收目标SIM卡号、给单片机板卡发送目标SIM卡号、给目标SIM卡号发送“安控自检”、“安控坠毁”指令等。为了提高短报文指令接收可靠性,在发送数据帧中对代表指令编码的字节连续重复3次组帧,当确认发送指令时,每间隔1 min重复发送1帧数据,连续发送3次。
软件开发环境为Labview 2012[7],主要采用了循环结构、条件结构、事件结构和定时结构等。
单片机板卡中的应用程序采用C51语言编写[8],其程序流程如图4所示。
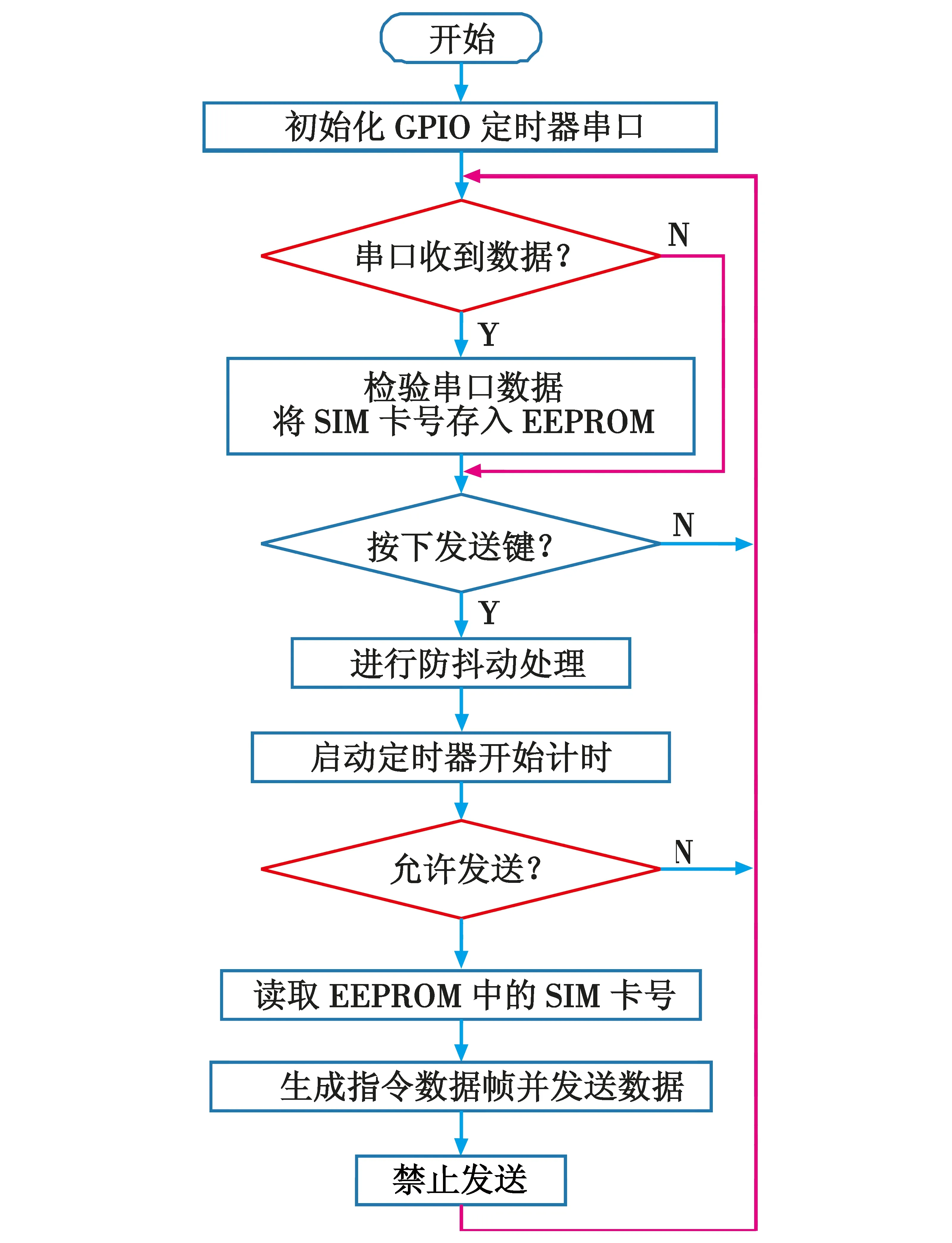
图4 单片机应用程序流程框图Fig.4 Flow chart of microcomputer application program
2.3 机载安控器硬件设计
机载安控器硬件由BD2/GPS OEM板、CPU板、馈线、配套天线及加温板等组成,如图5所示。

图5 机载安控器硬件组成图Fig.5 Airborne safety controller hardware composition
BD2/GPS OEM板接收北斗卫星信号,完成接收短报文和定位解算功能。短报文SIM卡采用三级民卡,以插卡形式安装在BD2/GPS OEM板上。
CPU采用ARM CORTEX-M3核心处理器,辅以外围电路,包括EEPROM存储器、复位、供电、时钟、串口电平转换等电路,接收BD2/GPS OEM板卡的输出数据并完成报文解算、BD安控指令生成、BD2/GPS导航定位信息获取、安控区域数据的接收与回显、安控区域顶点数据存储、安控区域判断、安控指令输出、与飞控计算机进行数据交换、向测控设备发送安控器的工作状态信息等功能。
ARM CORTEX-M3核心处理器生成的数字信号为CMOS电平,需要经过功率放大器进行功率放大,变为27 V,同时有足够的带载能力,可驱动电门盒里的继电器。为了确保安控器可靠执行安控指令,本文采用了两路GPIO冗余输出。
2.4 机载安控器软件设计
机载安控器软件的开发环境为Keil uVision4,采用C语言编程。机载安控器软件主流程如图6所示。
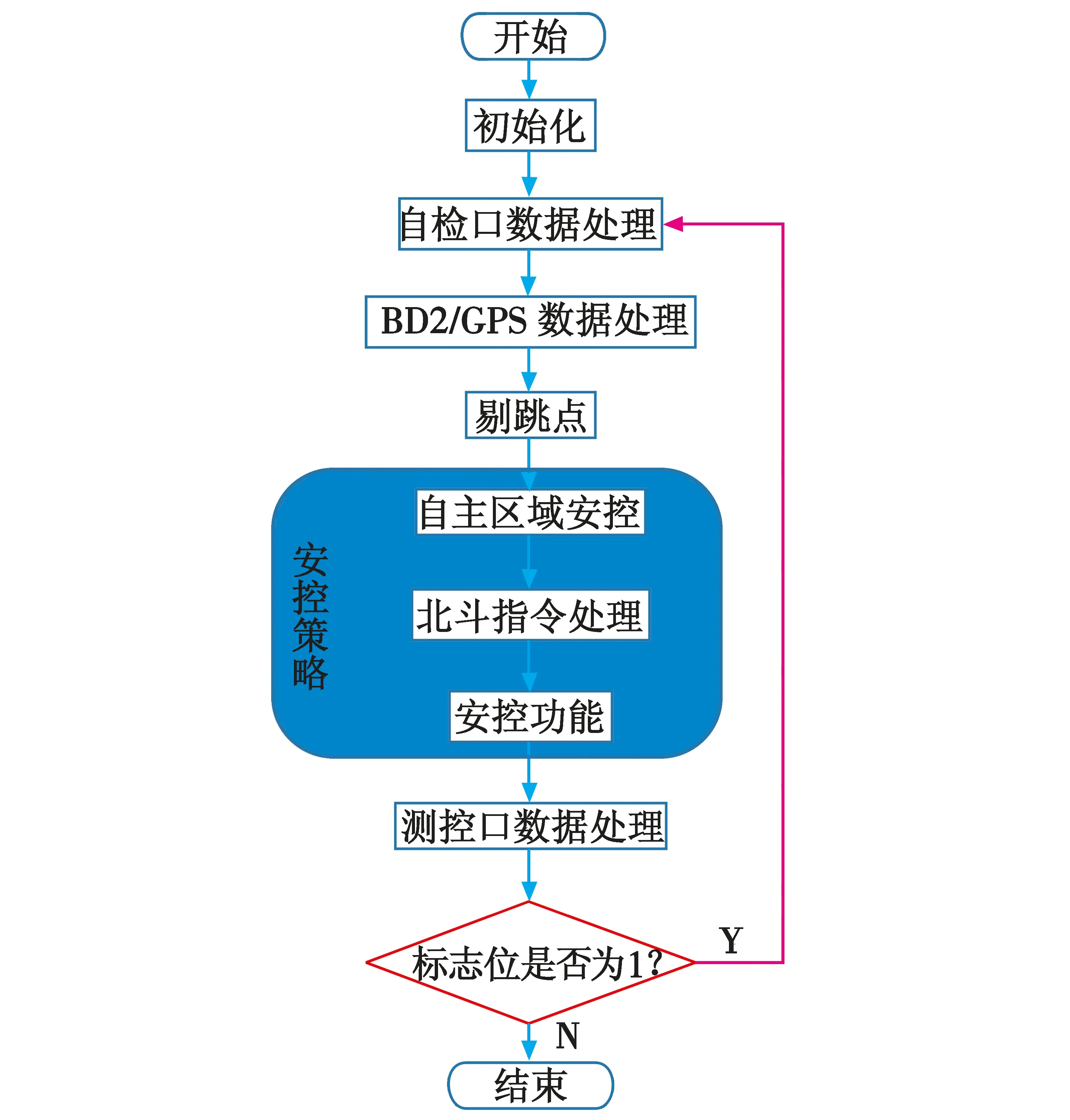
图6 机载安控器软件主流程图Fig.6 Flow chart of the airborne safety controller software
机载安控器主要实现了如下功能。
1) 安控区域信息装订:当机载BD安控器“监控与装订”串行口与地面测试设备相连时,接收地面测试软件中数据装订模块发送的凸多边形安控区域顶点经纬度数据,并按一定格式存储在BD安控器的EEPROM中。
2) 安控状态及BD2/GPS定位信息监控:当机载BD安控器“监控与装订”串行口与地面测试设备相连时,可实时监测BD2/GPS定位OEM板的输出信息和安控器的工作状态。
3) BD2/GPS定位信息解算:根据BD2/GPS帧协议,对定位信息进行解算。
4) BD短报文解算:实时监控BD短报文指令,并执行相应指令,同时将收到的短报文指令按通讯协议发送给测控设备,下传至地面测控站显示。
5) 自主安控判断:根据解算出的定位信息实时判断无人机当前位置与安控区之间的相对位置关系,并确定安控状态。
6) 执行安控:若自主安控判断满足执行安控条件或收到地面站“安控坠毁”指令后,输出数字量信号,控制舵机离合器断电。
3 实际使用情况
2016年10月,加装了新研北斗安控器的国产大型无人机在执行某次飞行任务时因故需要及时坠毁,地面北斗便携站发送北斗短报文“安控坠毁”指令,无人机机载安控器实时收到了指令并正确执行了坠毁动作,飞行任务圆满完成。
4 结束语
基于北斗短报文通信的无人机安控系统除了实现原来基于GPS定位信息的无人机自主安控功能外,还新增加了基于北斗短报文通信的远距离被动实时安控功能,其作用距离只受北斗卫星覆盖范围限制,较好地弥补了该型无人机原有安控系统的不足,为其安全控制提供了可靠保障。大量的地面测试和实际使用证明该方法有效可靠,并已经推广应用到同类型其他无人机安控系统中。
参考文献
[1] 何丽,刘茹,屈冬红,等.一种基于北斗短报文通信的动态组网技术[J].科学技术与工程,2015,15(13):149-152.
[2] 孙方霞.基于北斗短报文通信的落水报警终端设计[J].广东轻工职业技术学院学报,2015,14(4):12-15.
[3] 王华东.北斗卫星导航应急通信应用研究[J].卫星与网络,2013(12):66-70.
[4] 谷军霞,王春芳,宋之光.北斗短报文通信信道性能测试与统计分析[J].气象科技,2015,43(3):458-462.
[5]和芯星通科技(北京)有限公司.UX450用户手册[EB/OL].[2017-12-16].http://www.unicorecomm.com.
[6] 南通国芯微电子有限公司.STC15系列单片机器件手册[EB/OL].[2017-12-20].http://www.stcmcudata.com/datasheet/stc/STC-AD-PDF/STC15.pdf.
[7] 陈树学,刘萱. LabVIEW宝典[M].北京:电子工业出版社,2016.
[8] 徐爱钧,彭秀华. Keil Cx51 V7.0单片机高级语言编程与uVision2应用实践[M].北京:电子工业出版社,2006.
猜你喜欢
家庭影院技术(2021年3期)2021-05-21 02:15:00
铁道通信信号(2020年5期)2020-09-21 09:21:34
铁道通信信号(2019年9期)2019-11-25 01:45:00
电脑报(2019年1期)2019-09-10 03:06:32
测控技术(2018年3期)2018-11-25 09:45:46
测控技术(2018年12期)2018-11-25 09:37:42
铁道通信信号(2016年10期)2016-06-01 12:10:51
火控雷达技术(2016年3期)2016-02-06 02:30:33
电脑爱好者(2014年21期)2014-11-10 17:02:28
铁路通信信号工程技术(2014年5期)2014-02-28 16:57:49