GNSS空间信号精度评估方法
2018-06-21 00:54王尔申王世明曲萍萍
电光与控制 2018年6期
王尔申,王世明,雷 虹,庞 涛,曲萍萍,张 晴
(1.沈阳航空航天大学,a.电子信息工程学院; b.辽宁省通用航空重点实验室,沈阳 110136;2.沈阳飞机设计研究所电磁环境效应航空科技重点实验室,沈阳 110035)
0 引言
空间信号(SIS)精度主要包括用户测距误差(URE)、用户测速误差(URRE)、用户测加速度误差(URAE)和世界协调时偏移误差(UTCOE)4个参数[1-4]。URE是在不包含测量误差和接收机钟差的情况下,接收机和卫星之间的真实距离与接收机实际测量的伪距之差[5-7]。诸多文献采用格网法计算卫星在特定瞬间的URE,由于该方法的计算量较大,所以其又被称为“暴力法”。此外,可以利用精度更高的激光角反射器来观测导航卫星得到精密星历,评估广播星历的URE,使用该方法得到的伪距具有更高的精度和可靠性,但存在不能广泛布站以及观测数据有限等问题[8-9]。
本文以GPS和BDS为例,针对格网法和激光观测量法存在的问题,提出了一种基于轨道误差及钟差误差的分段式SIS URE评估模型,分别对GPS和BDS的URE进行了计算。在此基础上,本文采用交叠式Allan方差法评估了GPS和BDS的URRE和URAE。
1 SIS URE精度
SIS URE是指卫星位置和钟差的实际值与利用预报导航星历得到的预测值之差。由于卫星在某一个时刻的真实位置和钟差是无法准确得到的,通常将事后精密星历中取得的卫星位置和钟差数据作为实际值[10]。
通常用瞬时URE和置信度为95%的URE表示SIS URE[11-12]。假设瞬时URE~N(0,σ2),则在95%置信度下的URE与瞬时URE的标准差的关系为
95%URE=URE(1s)×1.96
(1)
式中,URE(1s)为指定时间段和服务区域内瞬时URE的标准差。
1.1 SIS URE评估模型
将URE分成广播星历误差和预报钟差误差两部分,统计卫星轨道的R,A,C和T,由此得到SIS URE的分段式算式为
(2)
(3)
(4)
式中:R为径向轨道误差;c为光速;T为钟差误差;A为切向轨道误差;C为法向轨道误差。
从上述算式可以看出,获取卫星的轨道以及钟差误差是计算SIS URE的关键,具体步骤如下。
1) 广播星历解析:通过广播星历得到卫星的轨道和钟差参数,将GPS和BDS广播星历参数分别代入对应接口控制说明文档中计算卫星轨道和钟差的算式里,得到GPS和BDS的广播星历和钟差,其中,GPS的坐标是在地心地固(ECEF)坐标系下的,BDS是在CGCS2000坐标系下的。
2) 卫星的真实位置获取: BDS和GPS在轨卫星的真实位置和钟差数据可以通过事后精密星历得到。由于官方只提供间隔15 min和5 min的精密星历,无法满足间隔30 s的采样率,因此需要对精密星历进行内插来得到与广播星历对应时间的卫星位置和钟差数据。考虑到插值节点增多会引起龙格现象,并考虑计算量和精度等因素,本文选取10阶拉格朗日滑动式分段内插,并取待插节点的前5组和后5组精密星历数据作为差值区间,表达式为
(5)
式中:t为待插值时间节点;t0,t1,t2,…,tn为n+1个插值时间节点;y0,y1,y2,…,yn是与n+1个插值时间节点对应的精密星历轨道误差和钟差分量。
3) SIS轨道误差及钟差误差计算:将解算精密星历数据得到的卫星位置、钟差与对应时刻解算的广播星历得到的数据做差,即可得到GPS和BDS在相应轨道坐标系下的钟差误差T以及轨道误差。在此基础上可得到轨道的径向、切向和法向误差为
ECIGPS=R(θ)·ECEF
(6)
ECIBDS=R(θ)·CGCS2000
(7)
(8)
式中:ECI表示在惯性坐标系下卫星的轨道误差;ECEF为在地心地固坐标系下卫星的轨道误差;R(θ)为旋转矩阵;r为卫星到地心连线方向单位向量;v为卫星速度方向与径向所构成的平面上的切向单位向量;c为垂直于轨道面的法向单位向量。
4) SIS URE计算:根据式(2)~式(4),利用步骤3)中得到的误差数据来计算GPS和BDS在指定时间段的URE值。
1.2 SIS URE数据处理与结果分析
1) 广播星历解析。
国际GPS服务中心(IGS)提供数据播发GPS和BDS的间隔为30 s 的RENIX 格式广播星历。将2015年BDS和GPS广播星历中得到的星历参数分别代入GPS和BDS接口控制文件的相关模型中,可计算得到GPS以及BDS在相应坐标系下的轨道位置和钟差。
2) 卫星的真实位置获取。
GPS的精密星历可以通过美国国家地理空间情报局(NGA)(时间间隔为5 min)和IGS(时间间隔为15 min)获取。由于目前NGA尚未提供BDS的精密星历,BDS的精密星历通过IGS获取(时间间隔为15 min),IGS提供的精密星历定位精度可达到5 cm左右。本文对GPS和BDS分别采用2015年NGA和IGS提供的精密星历,并利用式(5)分别处理卫星的轨道位置和钟差,获得与广播星历对应时刻的卫星真实位置和钟差。
3) SIS轨道误差及钟差误差计算。
可以直接通过上述方法来计算GPS在2015年的SIS的径向、切向、法向轨道误差和钟差误差。在计算轨道误差和钟差误差时需要解决以下几个问题。
① 时间系统不一致。BDS的广播星历时间基准为BDS时(BDT),而精密星历则采用GPS时(GPST),因此在计算BDS SIS URE前必须对时间系统进行统一。BDT与GPST的转换关系为
GPST-BDT=14(s)。
(9)
② 轨道参考框架不一致。BDS采用北斗坐标系(BeiDou Coordinate System,BDCS),与中国大地坐标系CGCS2000定义一致,而IGS提供的是基于国际地球参考框架(ITRF)的精密星(与WGS-84基本一致)。研究表明,在相同历元、相同框架下的两个坐标系坐标基本一致;两坐标系坐标在相同历元、不同框架下有约为3~5 cm的坐标差异,相比于米级的URE,可以忽略不计[13]。
③ 剔除计算过程中的明显粗差。在对广播星历和精密星历进行处理时,需要剔除如广播星历中明显的粗差,例如广播星历中卫星轨道数据标识为“不健康”、精密星历中出现的不正常的坐标和钟差等。此外,在计算卫星位置过程中会有一些标识为“健康”的卫星,但对其计算得到的结果可能会包含粗差,这些也需要剔除。
4) SIS URE计算。根据SIS轨道误差及钟差误差计算中得到的径向、切向、法向误差及钟差误差的瞬时值,结合式(2)~式(4)计算得到GPS和BDS每周的瞬时SIS URE均值,分别如图1和2所示。

图2 BDS瞬时SIS URE评估结果(周统计值)Fig.2 Evaluation results of BDS instant SIS URE(week statistic)
由图1可知,2015年GPS在轨卫星的SIS URE的最大值低于5 m,低于GPS SPS PS(2008)所规定的URE的最大值7.8 m,且除PRN8在某几周的URE明显高于其他卫星外,其余时间上卫星的瞬时URE基本上随时间平稳分布,且基本不超过2 m。从图1中还可以看出,随着GPS卫星的不断升级,其所提供的定位精度也越来越高,可以看到,发射较早卫星的URE值普遍小于发射较晚卫星的URE值。由图2可知,所有BDS在轨卫星的瞬时URE值均小于2.5 m,且基本分布平稳。另外,从图2中还可以看出,BDS 3类卫星中MEO卫星的稳定性相较于其他卫星最好。
相比于瞬时SIS URE,卫星在置信度95%下的URE更受GPS和BDS关注。对瞬时URE进行统计和计算,得到两个系统在置信度为95%时的SIS URE分别如图3和4所示。
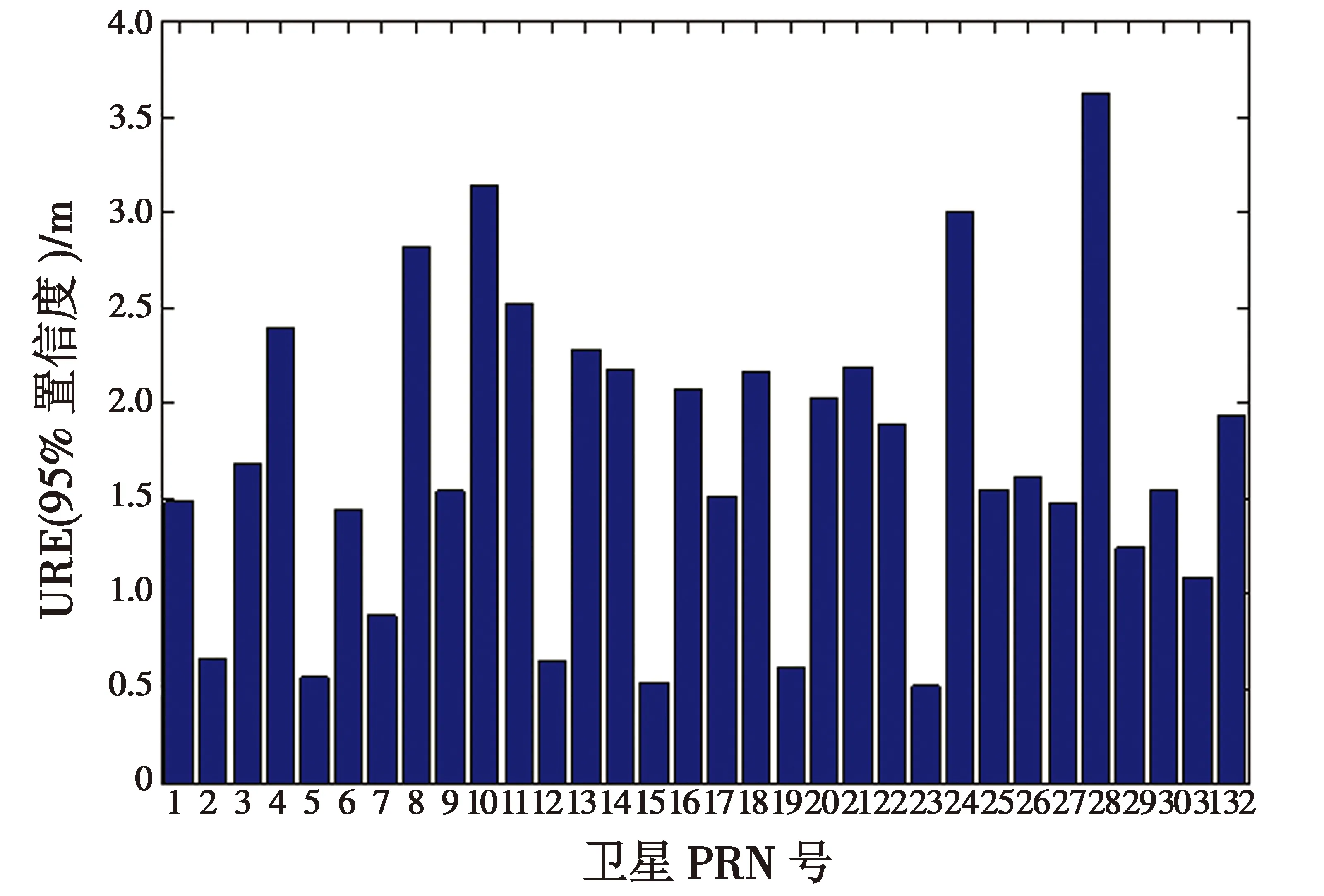
图3 GPS SIS URE(95%置信度)Fig.3 GPS SIS URE(95% confidence)
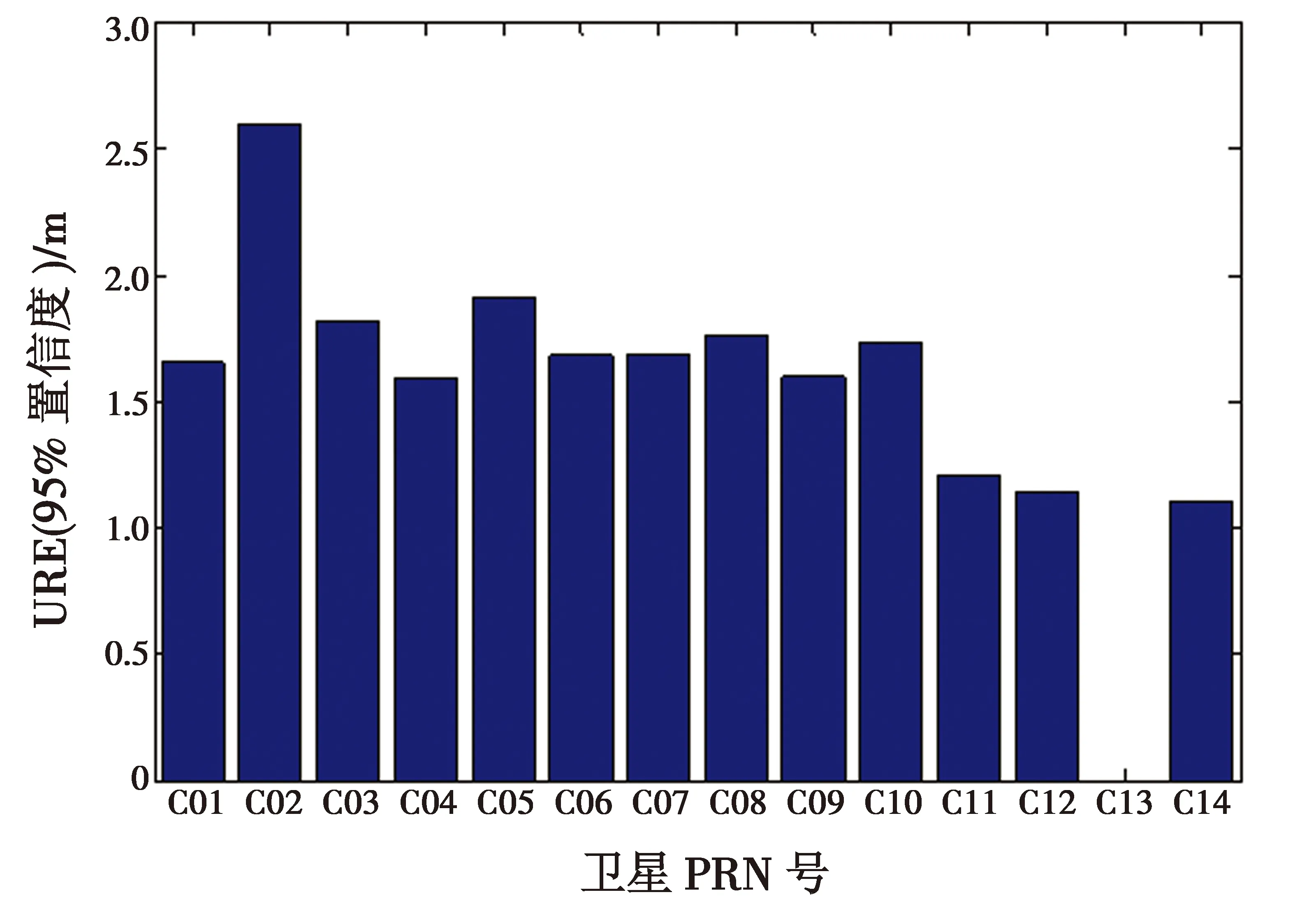
图4 BDS SIS URE(95%置信度)Fig.4 BDS SIS URE(95% confidence)
由图3可知,2015年GPS每颗卫星在95%置信度下的SIS URE精度均不超过4 m,并且除PRN8,PRN10,PRN24和PRN28外,其余卫星的SIS URE不超过2.5 m,符合GPS SPS PS(2008)中的指标,也验证了分段式SIS URE评估方法用于GPS系统的有效性。由图4可以看出,除C13卫星的URE无法统计外,2015年BDS每颗卫星在95%置信度下的SIS URE精度都小于3 m,另外,除C02卫星外,其余卫星均小于2 m,符合BDS-OS-PS-1.0中的指标。从图4中还可以发现,因为MEO卫星的URE低于GEO和IGSO,说明其SIS URE精度高于其他两类卫星。
2 SIS URRE和URAE精度
卫星导航系统的URRE和URAE分别定义为瞬时URE的一阶和二阶时间导数[4]。
2.1 SIS URRE和URAE评估模型
大量研究表明,卫星时钟的不稳定会引起较大的URRE和URAE误差,时钟的不稳定性将直接反映在URRE和URAE中,其误差可达到轨道误差的10倍以上。常用的计算卫星SIS URRE和SIS URAE有差分法和载波法,由于这两种传统方法均存在一定局限性,高稳定度振荡器的频率稳定度的时域表征目前均采用Allan方差,本文采用交叠式Allan方差法来评估卫星的URRE和URAE。
Allan方差法的原理:假设系统的采样周期为τ,对其进行连续采样,其中,X(i),i=1,2,3,…,N为采样后的N个数据点。对其按每M个点进行分组,则每组时间内各点的均值序列Y(k)为
(10)
从而差值序列D(k)为
D(k)=Y(k+M)-Y(k)k=1,2,…,N-2M+1
(11)
交叠式Allan方差表达式为
(12)
式中,〈〉表示求取均值。
将计算SIS URE时得到的卫星钟差误差作为初始样本X(i)代入式(10)~(12),得到D(k)和τ,求得的τ即为SIS URRE。同理,将D(k)作为初始样本代入式(10)~(12),计算相应的τ,即为SIS URAE。
2.2 SIS URRE和URAE评估与结果分析
本文以SIS URE计算过程得到的实测钟差误差作为初始样本,在剔除不健康的SIS后,利用2.1节所述评估模型,分别对2015年GPS和BDS的SIS URRE进行评估分析,得到GPS和BDS的SIS URRE(95%置信度),分别如图5和6所示。

图5 GPS SIS URRE(95%置信度)Fig.5 GPS SIS URRE(95% confidence)

图6 BDS SIS URRE(95%置信度)Fig.6 BDS SIS URRE(95% confidence)
由图5可知,在95%置信度下除PRN8,PRN10和PRN24卫星的SIS URRE大于0.006 m/s ,PRN28的略大于0.004 m/s外,其余卫星的均小于0.004 m/s,满足GPS SPS PS(2008)中0.006 m/s的指标。由图6可知,BDS可见卫星中在95%置信度下除C13卫星外,其余卫星的均小于0.001 8 m/s,满足BDS-OS-PS-1.0中0.006 m/s的指标。
与URRE类似,以钟差的差值序列为初始样本,代入到2.1节所述评估模型中,得到2015年GPS和BDS卫星的SIS URAE精度(95%置信度),如图7和8所示。
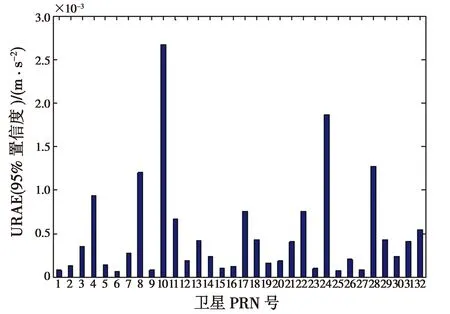
图7 GPS SIS URAE(95%置信度)Fig.7 GPS SIS URAE(95% confidence)

图8 BDS SIS URAE(95%置信度)Fig.8 BDS SIS URAE(95% confidence)
由图7可知,GPS可见卫星中在95%置信度下,除PRN10的URAE较其他卫星明显偏大外,其余卫星均满足GPS SPS PS(2008)0.002 m/s2的指标。由图8可知,BDS可见卫星在95%置信度下,除C13卫星外,其余所有卫星均满足BDS-OS-PS-1.0中0.002 m/s2的指标。
3 结论
本文基于研究的分段式SIS URE评估模型,利用2015年IGS提供的实测数据评估了GPS和BDS的SIS URE性能;并基于Allan方差法,评估了GPS和BDS的URRE和URAE性能。结果表明:除BDS C02卫星的URE以及GPS PRN10卫星的URAE略大以外,其余GPS和BDS卫星的SIS URE,URRE和URAE均符合各自系统的指标要求,验证了所研究的精度评估方法的有效性。
参考文献
[1] YU L,ZHAO G P,ALICE A,et al.How reliable is satellite navigation for aviation?Checking availability properties with probabilistic verification[J].Reliability Engineering and System Safety,2015,144:95-116.
[2] 王尔申,张晴,雷虹,等.GPS空间信号可用性评估算法[J].电光与控制,2017,24(2):39-42,46.
[3]U.S.Department of Defense.Global positioning system standard positioning service performance standard[R].4th ed.Washington:DS,2008.
[4] 中国卫星导航系统管理办公室.北斗卫星导航系统公开服务性能规范(1.0版).[M].北京:中国卫星导航系统管理办公室,2013.
[5] WALTER T,BLANCH J,ENGE P.Evaluation of signal in space error bounds to support aviation integrity[J].Navigation,Journal of the Institute of Navigation,2010,11(26):11-21.
[6] 张清华,隋立芬,贾小林,等.北斗卫星导航系统空间信号误差统计分析[J].武汉大学学报:信息科学版,2014,39(3):271-274.
[7] SUN S,WANG Z P.Signal-in-space accuracy research of GPS/BDS in China region[C]//China Satellite Navigation Conference(CSNC)Proceedings,Lecture Notes in Electrical Engineering,2016:235-245.
[8] 秦显平,杨元喜,焦文海,等.利用SLR和伪距资料确定导航卫星钟差[J].测绘学报,2004,33(3):205-209.
[9] 路晓峰,贾小林,杨志强.利用SLR和GPS双频相位平滑伪距资料测定导航卫星钟差[J].武汉大学学报:信息科学版,2008,33(3):237-240.
[10] COHENOUR C,GRASS F R.GPS orbit and clock error distributions[J].Navigation,2011,58(1):17-28.
[11] HENG L,GAO X X,WALTER T,et al.Statistical cha-racterization of GPS signal-in-space errors[C]//Institute of Navigation-International Technical Meeting(ION ITM), 2011:312-319.
[12] 刘万科,任杰,曾琪,等.2013—2015年BDS空间信号测距误差的精度评估[J].国防科技大学学报,2016, 38(3):1-6.
[13] 彭小强,高井祥,王坚.WGS84和CGCS2000坐标转换研究[J].大地测量与地球动力学,2015,35(2):219-221.
猜你喜欢
核科学与工程(2021年4期)2022-01-12
导航定位学报(2018年3期)2018-09-03
计算机应用(2018年5期)2018-07-25
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
中等数学(2017年2期)2017-06-01
载人航天(2016年4期)2016-12-01
水利科技与经济(2016年9期)2016-04-22
轴承(2015年2期)2015-07-25
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28