基于FRFT域峰值特性的压制干扰检测算法
2018-06-21 00:57:06王国宏
电光与控制 2018年6期
白 杰,王国宏,杨 林
(海军航空大学,山东 烟台 264001)
0 引言
现代雷达所面临的电磁环境日益恶劣,针对雷达的电磁干扰技术迅速发展,特别是有源压制干扰的大量使用,极大制约了雷达作战效能的发挥[1]。面对有源压制干扰,在复杂电磁环境下对压制干扰进行快速的存在性检测,成为抗干扰工作的必要前提。所以对有源压制干扰检测技术的研究对雷达的实战和发展具有实际性的推动作用。
目前,国内外学者在雷达压制干扰存在性检测方面做了大量研究。文献[2]根据不同压制干扰信号在FRFT域的分形特性差异,通过门限判决的方法完成不同压制干扰类型的检测;文献[3]通过能量检测法、极化识别法和功率谱相关性理论对压制干扰信号进行检测;文献[4]从接收机结构出发,提出了通过提取噪声功率进行压制干扰检测的方法。上述文献通过提取不同参数较好地完成了压制干扰的存在性检测,但是,所提算法没有较好地将压制干扰的存在性检测与完整的雷达抗干扰系统相结合,导致干扰检测算法与抗干扰系统之间相互独立。
针对这个问题,在充分分析LFM信号以及压制干扰信号在FRFT域特征的基础上,提出了一种基于FRFT域峰值特性的压制干扰检测算法。
1 模型建立与分析
1.1 雷达回波信号模型建立
线性调频(Linear Frequency Modulation,LFM)信号作为一种重要的信号体制,具有较大的时宽带宽积,能够同时满足作用距离和距离分辨率的要求,从而被广泛应用于现代雷达系统,因此,选取线性调频信号作为雷达的信号形式进行研究。
假设在一段观测时间内目标的运动速度不变,则有源压制干扰环境下的回波信号表示为
x(t)=sr(t)+J(t)+n(t)
(1)
式中:sr(t)=s(t-τ)ejωd(t-τ)表示目标回波信号,τ表示回波时延,ωd表示多普勒角频率;n(t)表示背景噪声;J(t)表示射频噪声干扰、噪声调幅干扰和噪声调频干扰3种有源压制干扰中的一种。假设n(t)服从高斯分布,且与J(t)相互独立,雷达发射的LFM信号表示为
s(t)=exp[-j(2πf0t+(kt2/2))]
(2)
式中:f0表示线性调频信号的载频;k表示调制斜率。
1.2 模型分析
由式(1)可以看出,当回波信号x(t)中的压制干扰信号J(t)较强时,回波信号的干扰特性较明显,此时根据不同干扰信号的特征差异进行分类识别[5-6]的正确率较高,进而根据分类识别结果对压制干扰进行针对性抑制;而在干扰机功率不足、干扰方向未对准以及干扰距离较远的情况下,回波信号中的目标回波信号sr(t)较强,此时能够根据LFM信号的特征直接进行目标检测[7-8],而不需要对压制干扰信号进行了解。但是,在实际战场环境下,雷达方对回波信号的信干比是未知的,因此需要通过压制干扰的存在性检测算法对回波信号信干比高低进行判断,以决定对回波信号进行目标检测还是进行压制干扰分类。所以本文对压制干扰检测参数的提取以现有目标检测算法和压制干扰分类识别算法为参考。
2 基于FRFT域特征的压制干扰检测算法
参考目前基于FRFT域的目标检测算法[9-10]和干扰分类算法[11],拟利用LFM信号与压制干扰信号在FRFT域的特征差异提取峰值阶次作为特征参数进行干扰检测。
2.1 信号FRFT域峰值特性分析
2.1.1 LFM信号FRFT域的峰值特性分析
时域函数x(t)的p阶FRFT变换[12]表示为
(3)
式中,Kp(u,t)为FRFT核函数,算式为
(4)
当变换角度α与LFM信号的调频率k正交,即α=

|Fα[s(t)]|=|A(t)Aασ(2πf0-ucscα)|。
(5)
由式(5)可以看出,此时LFM信号在u域表现为冲激函数,具有明显的能量聚集特性,所以LFM信号在FRFT域的峰值点即为能量聚集点,峰值点所在变换阶次pz表示为
(6)
由式(6)可以看出,LFM信号的调制斜率k满足k>0,所以pz满足pz>1。
2.1.2 压制干扰信号FRFT域的峰值特性分析
通过仿真实验得到不同压制干扰类型在FRFT域的峰值特性。图1表示射频噪声干扰、噪声调幅干扰和噪声调频干扰在FRFT域的谱分布以及峰值点所在变换阶次情况。






图1 仿真实验结果Fig.1 Simulation result
由图1a和图1b可以看出,射频噪声干扰在FRFT域能量较均匀分布,其在FRFT域的峰值随机出现在任意变换阶次;由图1c和图1d可以看出,噪声调幅干扰在FRFT域具有较强的能量聚集特性,其峰值稳定出现在变换阶次p=1的位置;由图1e和图1f可以看出,噪声调频干扰在FRFT域具有局部能量聚集的特性,其峰值出现在一定的变换阶次范围内。
通过以上分析与实验可以看出,LFM信号与压制干扰信号在FRFT域的峰值阶次具有较大差异,所以可以根据回波信号在FRFT域的峰值阶次进行压制干扰的存在性检测。
2.2 压制干扰序贯检测算法
根据LFM信号与压制干扰信号在FRFT域的峰值特性差异,采用序贯判决算法[13]进行压制干扰的存在性检测:根据式(6)得到LFM信号在FRFT域的正交阶次pz,取以pz为中心的一小段区间为δ(pz)。将一定观测时间内的回波信号分成N段,通过峰值搜索算法得到其在FRFT域的峰值阶次分别为pj(j=1,2,…,N),若pj中,取值落在δ(pz)区间内的个数D小于门限值T,则判断压制干扰存在,否则判定压制干扰不存在。算法流程如图2所示。
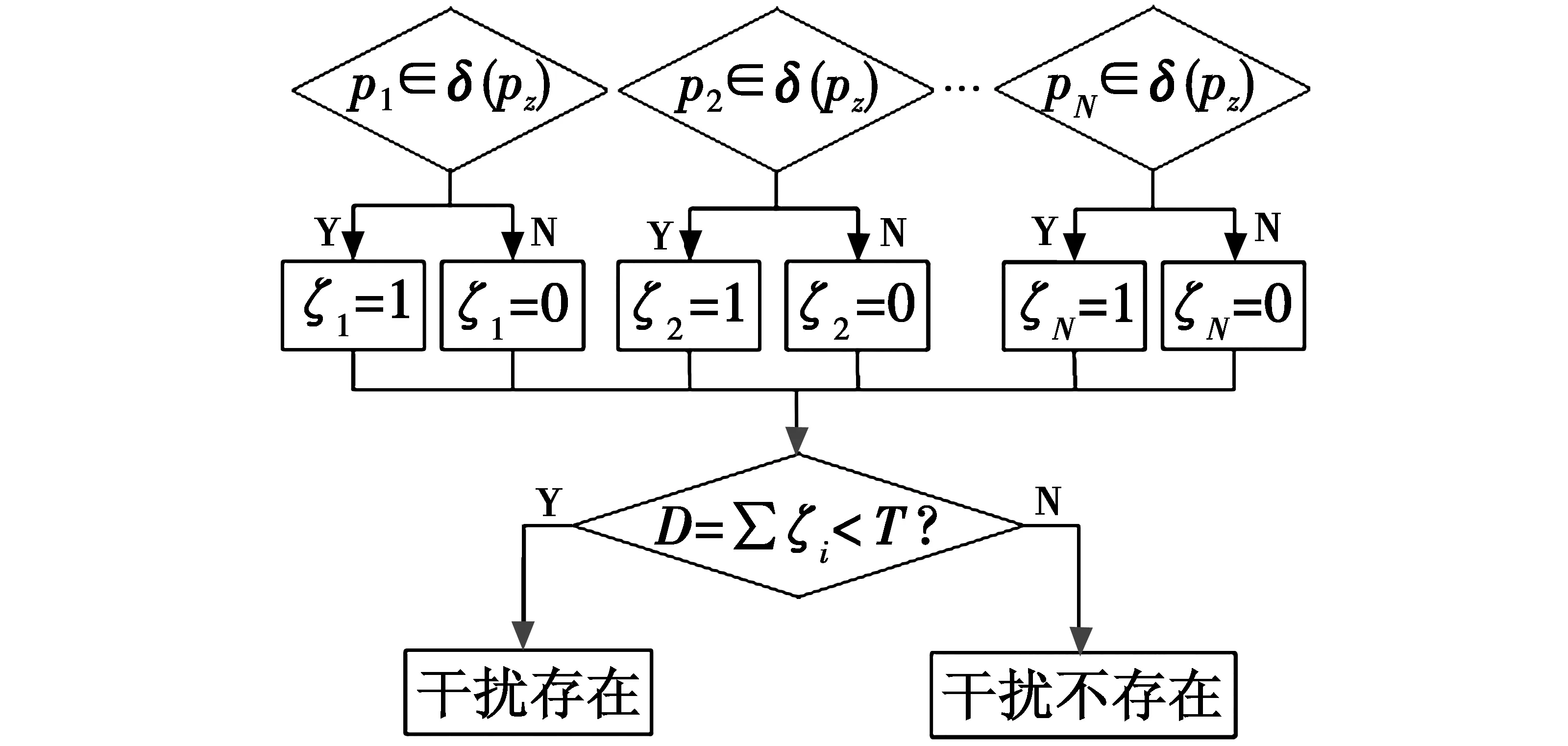
图2 存在性检测算法Fig.2 The existence detection algorithm
3 仿真实验验证
3.1 仿真参数设置

表1 干扰信号仿真参数表Table 1 Interference signal parameters
3.2 仿真验证与分析
3.2.1 射频噪声干扰的检测
图3表示射频噪声干扰的检测结果。

图3 射频噪声干扰检测结果Fig.3 Detection results of radio frequency noise jamming
由图3可以看出,当干信比小于12.3 dB时,未检测到压制干扰的存在,此时LFM信号在FRFT域的能量聚集点即为回波信号的峰值点,可以直接进行目标检测;当干信比大于12.3 dB后,随着干信比的增高,干扰检测概率随之增大,并在干信比大于16.4 dB后达到100%,此时回波信号的压制干扰特征明显,能够保证干扰分类识别具有较高的正确率。
3.2.2 噪声调幅干扰的检测
图4表示噪声调幅干扰的检测结果,可以看出,当干信比小于9.7 dB时,未检测到压制干扰的存在,此时LFM信号在FRFT域的能量聚集点即为回波信号的峰值点,可以直接进行目标检测;当干信比大于9.7 dB后,随着干信比的增高,干扰检测概率随之增大,并在干信比大于10.7 dB后达到100%,此时回波信号的压制干扰特征明显,能够保证干扰分类识别具有较高的正确率。

图4 噪声调幅干扰检测结果Fig.4 Detection results of noise AM jamming
3.2.3 噪声调频干扰的检测
图5表示噪声调频干扰的检测结果,可以看出,当干信比小于9.2 dB时,未检测到压制干扰的存在,此时LFM信号在FRFT域的能量聚集点即为回波信号的峰值点,可以直接进行目标检测;当干信比大于9.2 dB后,随着干信比的增高,干扰检测概率随之增大,并在干信比大于14.8 dB后达到100%,此时回波信号的压制干扰特征明显,能够保证干扰分类识别具有较高的正确率。
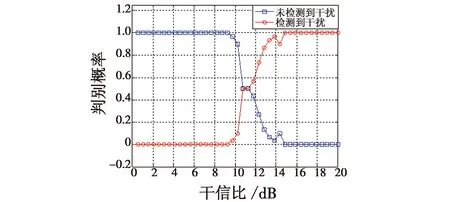
图5 噪声调频干扰检测结果Fig.5 Detection results of noise FM jamming
4 结束语
从完整的雷达抗干扰系统角度考虑,通过提取回波信号在FRFT域的峰值阶次完成了有源压制干扰的检测,同时将压制干扰的存在性检测算法与现有的目标检测算法和干扰分类算法相结合,从而较好地解决了干扰检测算法与抗干扰系统之间相互独立的问题。
参考文献
[1] 赵国庆.雷达对抗原理[M].西安:西安电子科技大学出版社,2012:122-123.
[2] ZHU H,JIANG G,ZHANG H,et al.Existence detection of blanket jamming based on fractal characteristics in FRFT domain[J].强激光与粒子束,2016,28(5):78-84.
[3] 魏义飞.对压制性干扰信号的检测与定位[D].西安:西安电子科技大学,2010.
[4] 高腾,金晓帆,王李军.一种基于典型卫星导航接收机基带处理流程的压制干扰检测方法[J].通信对抗,2016(2):23-26.
[5] MA J,HUANG G,ZUO W,et al.Robust radar waveform recognition algorithm based on random projections and sparse classification[J].IET Radar,Sonar & Navigation, 2014,8(4):290-296.
[6] TANG Z,ZHANG B,LI G Q.Radar active blanket jamming sorting based on resemblance coefficient cluster[C]//IEEE International Conference on Signal Processing,2013:1-6.
[7] JIN Y,DUAN P,JI H.Parameter estimation of LFM signals based on scaled ambiguity function[J].Circuits Systems & Signal Processing,2016,35(12):1-18.
[8] DING Y,SUN L,ZHANG H,et al.A multi-component LFM signal parameters estimation method using STFT and Zoom-FRFT[C]//IEEE International Conference on Communication Software and Networks,2016:112-117.
[9] LIU D,LIU Y,CAI H,et al.Linear frequency-modulated continuous wave active sonar signal processing[C]//Oceans,IEEE,2014:1-5.
[10] 陈小龙,关键,刘宁波,等.基于FRFT的LFM信号自适应滤波算法及分析[J].现代雷达,2010,32(12):48-53.
[11] 袁兰杰,王科攀,高勇.分数阶傅里叶变换(FRFT)用于调制方式识别[J].电子信息对抗技术,2011,26(4):26-29.
[12] 陶然,邓兵,王越,等.分数阶傅里叶变换及其应用[M].北京:清华大学出版社,2009:11-12.
[13] YANG Y,WU Y,ZHANG H,et al.Improved sequential extraction method for determination of alkali and alkaline earth metals in Zhundong coals[J].Fuel,2016,181:951-957.
猜你喜欢
电气技术(2021年3期)2021-03-26 02:46:08
通信电源技术(2020年22期)2020-03-27 06:48:02
汽车实用技术(2019年24期)2019-12-27 03:52:46
组合机床与自动化加工技术(2019年7期)2019-08-06 03:51:06
测控技术(2018年1期)2018-11-25 09:43:50
无人机(2018年1期)2018-07-05 09:51:02
价值工程(2017年28期)2018-01-23 20:48:29
科技资讯(2016年12期)2016-05-30 05:07:58
工业设计(2016年6期)2016-04-17 06:42:54
弹箭与制导学报(2015年1期)2015-03-11 15:32:27