
牵引电机扭矩激扰的机车齿轮传动系统非线性特性
2018-06-19 01:02王俊国杨旭峰赵永翔方修洋
中国机械工程 2018年11期
王俊国 肖 遥 杨旭峰 赵永翔 方修洋
西南交通大学机械工程学院,成都,610031
0 引言
作为机车驱动系统的关键零部件,齿轮副服役过程中的动力学性能直接影响列车的安全性与稳定性。早期对齿轮传动轴系进行研究主要根据线性振动理论,采用的大多是集中质量、连续质量或有限元模型。20世纪90年代开始考虑非线性因素对传动轴系的影响[1]。KAHRAMAN 等[2]建立了一个含轮齿间隙和啮合刚度的非线性齿轮-转子-轴承模型。LEE等[3]利用有限元方法,研究了转速和啮合刚度变化时齿轮系统的振动特性。刘梦军等[4]利用混合胞映射方法分析得出了不同输入转矩波动、齿侧间隙、齿轮综合误差、激励频率和阻尼比参数下,单齿轮系统的全局特性。马呈祥等[5]利用Romax软件和有限元箱体模型,建立了和谐号机车驱动装置分析模型。魏静等[6]通过高速机车齿轮传动系统多自由度动力学分析模型,归纳出了齿轮内部激励、齿面间隙等参数对机车齿轮传动系统的影响规律。借助Simpack软件,李晓龙等[7]建立了考虑扭矩传递、齿轮啮合特性的驱动装置动力学模型。崔利通[8]建立了包括牵引电机、转子、齿轮箱体在内的动力转向架模型,研究了参数变化对各自系统动力学特性的影响。
高速列车齿轮传动系统结构复杂,在服役过程中承受单双齿交替啮合产生的高频交变载荷,以及机车启动、制动、通过道岔时的轮轨冲击载荷作用,此外还受到突变的激扰因素影响。齿轮传动系统常常由于齿轮的齿侧间隙、时变啮合刚度等非线性因素激发各种故障。如何揭示齿轮副模型参数变化与系统动力学特性、齿轮副稳定性之间的内在关系,是机车齿轮驱动过程中亟需深入研究的课题[9]。为此,本文以某和谐号货运机车的齿轮传动系统为研究对象,基于非线性动力学理论,分析研究牵引电机扭矩变化时传动系统复杂的非线性动力学特性及演化规律,以期为铁路机车齿轮传动系统的模型参数设计以及振动控制提供理论支撑。
1 机车齿轮传动系统动力学模型
1.1 齿轮传动系统数学模型
图1为某和谐号机车直齿齿轮传动系统的结构示意图。小齿轮采用简支梁方式过盈安装在牵引电机转轴上,大齿轮则通过齿轮毂安装于机车动力轴上,电机驱动扭矩经齿轮副传递给动力轮对,驱动列车运行。该齿轮传动系统的动力学简化模型如图2所示[9]。

图1 某和谐号机车齿轮传动系统结构示意图Fig.1 Schematic of the mechanical transmission system for HXD locomotive

图2 某和谐号机车齿轮传动系统动力学简化模型Fig.2 Simplified model of the spur gear transmission system for HXD locomotive
设 m1、m2、I1、I2、R1、R2分别为小齿轮和大齿轮的质量、转动惯量、基圆半径,k1、k2、c1、c2为轴承和转轴的支承刚度和阻尼,F0(t)为齿轮动态啮合力,k(t)、cm为齿轮啮合的综合刚度和阻尼,T1、T2为牵引电机额定功率下输出转矩、轨道对轮对的反作用力矩,y1、y2分别为小齿轮、大齿轮在啮合线方向移动的位移,θ1、θ2为小齿轮、大齿轮分别绕电枢轴、轮对轴转过的角度,则齿轮传动系统的动力学方程为[10]
设

其中,e(t)为啮合误差,km、ka分别为齿轮平均啮合刚度和近似计算刚度,φ为初始相位,ω为啮合频率,me为等效质量,则上述模型变成:

若齿轮副齿侧间隙为2b,设w3=y/b,则间隙非线性函数 f(w3)的量纲一表达式变为


1.2 轮轨黏滑状态下的负载转矩
机车牵引或制动工况运行时,轮轨间容易出现滑动。为描述其滑动程度,定义轮对滑动率[11]:

式中,v为轮对速度;ωw为轮对旋转角速度(设大齿轮齿数为 Z2,有ωw=2πω/Z2);R为轮对滚动圆半径。
当机车发生空转时,s为一较大值,驱动工况下,s为一负值,为便于表达,文中取绝对值表示。
由于轮轨产生的摩擦热及钢轨表面粗糙等原因,当轮轨切向力达饱和值时,滑动率增大,此时轮轨切向力将减小,轮轨的这种特性称为黏着负斜率特性。本文采用图3a所示黏滑特性曲线,描述轮轨黏着系数与蠕滑之间的关系,其中正斜率OA段为黏着状态,负斜率AB段为滑动状态。该特性曲线可用分段函数表示为

式中,fm为最大黏着系数;sc为临界滑动率;kf为曲线负斜率。
图3b中,a表示轮轨处于黏着状态,b表示轮轨处于黏滑振动状态,c表示轮轨处于全滑动状态。机车以额定功率运行时,临界滑动率取值0.01,滑动率s不大于0.03。

图3 机车轮轨黏滑特性曲线Fig.3 Simplif i ed curve of tangential force coefficient of locomotive
设机车轴重为mg,则轨道对轮对的瞬时黏着力及力矩为 Fr=Fmg及 Mr=FrR,其中 Fr包括了轨道对轮对的动态牵引力和静态牵引力,Mr中包括轨道对轮对动态力矩和静态力矩两部分。将Fr及Mr代入式(5),可得轮轨间的黏着力矩,亦即轨道对轮对的反作用力矩表达式为[11]

2 电机扭矩激扰的非线性特性仿真
某和谐号机车交流电机牵引特性曲线见图4,当牵引电机转速低于1 500 r/min时,电机输出的扭矩与转速成线性关系;自牵引电机转速为1 500 r/min开始,机车进入恒功率运行阶段,对应电机功率为1 275 kW,直至恒功结束点,对应电机转矩约4 kN·m。为研究该型机车齿轮传动系统的动力学特性,对机车齿轮传动系统量纲一模型进行数值积分,仿真参数取值如下:小大齿轮基圆半径R1=0.086 45 m、R2=0.451 05 m,支承刚度k1=k2=5.9×108N/m,平均啮合刚度km=1.9×108N/m,近似计算刚度ka=3.5×107N/m,支承阻尼c1=c2=300 N·s/m,齿轮啮合阻尼比为0.05,齿轮模数为8 mm,齿侧间隙b=0.125 mm。
图5即为取固定步长为50,采用MATLAB软件数值积分后得到的传动系统量纲一位移随牵引电机扭矩变化的分岔图。由该分岔图曲线可知,当机车牵引电机的扭矩以图4所示牵引特性曲线变化时,齿轮传动系统的非线性动力学响应经历了单周期、多周期、混沌等多种运动形式,并且牵引电机在恒功率起始点即电机扭矩为8 000 N·m前后两个阶段,传动系统的非线性动力学演化规律差别较大。

图4 机车交流电机的牵引特性曲线Fig.4 Traction characteristic curve of locomotive AC motor

图5 系统位移随牵引电机扭矩变化的分岔图曲线Fig.5 Bifurcation diagram of the system using the torque of traction motor as control parameter
由图5可知,当电机扭矩小于9 900 N·m时,系统响应首先为单周期,在扭矩为9 900~9 800 N·m时,系统进入周期2运动。当扭矩在9 750~9 650 N·m变化时,系统经历短暂的拟周期状态后在9 600~9 450 N·m再次进入周期2运动状态,其后扭矩在9 400~8 150 N·m区间变化,系统回归单周期稳定运动状态。图5还显示,电机扭矩在恒功起始点前,即扭矩为8 100 N·m处,系统陷入随机的、不规则的运动状态,即进入阵发性混沌状态,当电机扭矩为8 000 N·m时,系统经短暂的单周期运动,在扭矩为7 950~6 900 N·m区间,再次陷入阵发性混沌状态,其后扭矩在6 850~6 750 N·m区间变化,系统做周期2运动,在扭矩为6 700 N·m处进入单周期运动,倒分岔现象一直持续到扭矩为5 000 N·m左右。当电机扭矩为4 950 N·m时,系统响应为周期3运动,即系统处于混沌状态[12];随后系统很快就在扭矩为4 800~4 600 N·m范围进入混沌状态,最终,当扭矩小于4 550 N·m时,系统脱离混沌进入到单周期稳定状态,直至机车牵引电机恒功率的终点。

图6 牵引电机扭矩为9 950 N·m时系统动力学特性曲线Fig.6 The dynamic characteristic curve of the system when torque is equal to 9 950 N·m
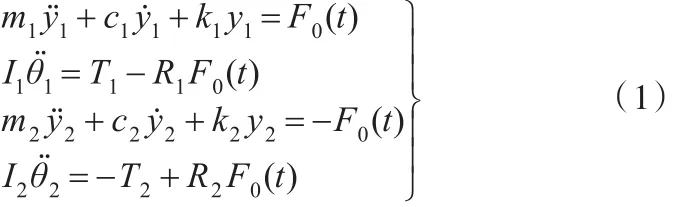
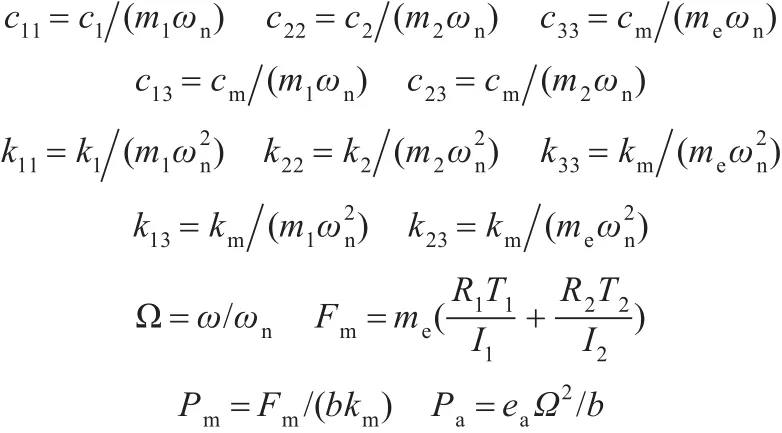
为进一步说明机车传动系统复杂的动力学演化规律,图6~图13分别给出了扭矩取不同值时系统的动力学响应曲线。根据单周期、多周期、混沌运动的相关特征可知:图6、图11、图13是单周期运动,图7、图9、图12为周期2运动,图14对应周期3运动,而图8、图11、图15对应的机车齿轮传动系统运动状态均为混沌状态。

图7 牵引电机扭矩为9 850 N·m时系统动力学特性曲线Fig.7 The dynamic characteristic curve of the system when torque is equal to 9 850 N·m

图8 牵引电机扭矩为8 500 N·m时系统动力学特性曲线Fig.8 The dynamic characteristic curve of the system when torque is equal to 8 500 N·m
图9 牵引电机扭矩为7 800 N·m时系统动力学特性曲线Fig.9 The dynamic characteristic curve of the system when torque is equal to 7 800 N·m

图10 牵引电机扭矩为6 800 N·m时系统动力学特性曲线Fig.10 The dynamic characteristic curve of the system when torque is equal to 6 800 N·m
图11 牵引电机扭矩为6 600 N·m时系统动力学特性曲线Fig.11 The dynamic characteristic curve of the system when torque is equal to 6 600 N·m
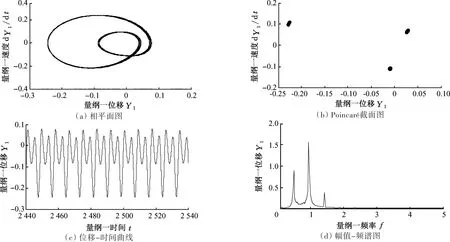
图12 牵引电机扭矩为4 950 N·m时系统动力学特性曲线Fig.12 The dynamic characteristic curve of the system when torque is equal to 4 950 N·m

图13 牵引电机扭矩为4 700 N·m时系统动力学特性曲线Fig.13 The dynamic characteristic curve of the system when torque is equal to 4 700 N·m
3 结论
(1)机车齿轮传动系统动力学模型的内部激励包含齿侧间隙和时变啮合刚度,是齿轮系统具有非线性特征的根本原因。随着外部激励机车牵引电机扭矩的变化,系统动力学响应进入混沌的路径有三条,其一为“倍周期分岔→混沌”,另两条分别是“阵发性混沌”和“周期3→混沌”。
(2)机车齿轮传动系统进入混沌运动状态后,除整数倍频成分外,1.5倍频、2.5倍频等谐波成分也随之增大,齿轮碰撞程度趋于激烈,传动系统稳定性会变差。因此,为减小齿轮啮合造成的碰撞伤害,设计该型机车传动系统外部激励参数时,牵引电机额定转矩应低于8 000 N·m,这一结论与实际情况相符。
[1] 申永军,杨绍普.齿轮系统的非线性动力学与故障诊断[M].北京:科学出版社,2014.SHEN Yongjun,YANG Shaopu.Nonlinear Dynamics and Fault Diagnosis of Gear System[M].Beijing:Science Press,2014.
[2] KAHRAMAN A,SINGH R.Interactions between Timevarying Mesh Stiffness and Clearance Non-linearity in a Geared System[J].Journal of Sound and Vibration,1991,146(1):135-156.
[3] LEE A S,HA J W,CHOI D H.Coupled Lateral and Torsional Vibration Characteristics of a Speed Increasing Geared Rotor-bearing System[J].Journal of Sound and Vibration,2003,263(4):725-742.
[4] 刘梦军,沈允文,董海军.齿轮系统参数对全局特性影响的研究[J].机械工程学报,2004,40(11):58-63.LIU Mengjun,SHEN Yunwen,DONG Haijun.Research on the Affection of the Gear System Parameters on the Global Character[J].Chinese Journal of Mechanical Engineering,2004,40(11):58-63.
[5] 马呈祥,张志和,杨俊杰,等.机车驱动装置的系统分析[J].铁道机车车辆,2012,32(3):27-30.MA Chengxiang,ZHANG Zhihe,YANG Junjie,et al.System Analysis on Locomotive Driving Device[J].Railway Locomotive and Car,2012,32(3):27-30.
[6] 魏静,孙清朝,孙伟,等.高速机车牵引齿轮传动系统动态特性及非线性因素影响研究[J].振动与冲击,2012,31(17):38-50.WEI Jing,SUN Qingchao,SUN Wei,et al.Dynamic Analysis and Effects of Nonlinear Factors of a Gear Transmission System for High Speed Locomotive[J].Journal of Vibration and Shock,2012,31(17):38-50.
[7] 李晓龙.高速列车齿轮驱动装置建模及其动态特性研究[D].成都:西南交通大学,2013.LI Xiaolong.Drivetrain Modelling of High Speed Train and Study on Its Dynamic Characteristics[D].Chengdu:Southwest Jiaotong University,2013.
[8] 崔利通.高速列车牵引传动系统振动特性分析[D].成都:西南交通大学,2014.CUI Litong.Vibration Characteristic Analysis of Driving System for High-speed Trains[D].Chengdu:Southwest Jiaotong University,2014.
[9] WANG J G,HE G Y,ZHANG J,et al.Nonlinear Dynamics Analysis of the Spur Gear System for Railway Locomotive[J].Mechanical Systems and Signal Processing,2017,2:41-55.
[10] 刘晓宁.齿轮系统的混沌控制及仿真[D].西安:西北工业大学,2007.LIU Xiaoning.Chaos Control of Geared System and Its Simulation[D].Xi'an:Northwestern Polytechnical University,2007.
[11] 姚远,张红军,罗赟,等.黏滑振动理论及其在铁路机车中的应用[J].机械工程学报,2010,46(24):75-82.YAO Yuan,ZHANG Hongjun,LUO Yun,et al.Theory of Stick-slip Vibration and Its Application in Locomotive[J].Journal of Mechanical Engineering,2010,46(24):75-82.
[12] LI T Y,YORKE J A.Period Three Implies Chaos[J].The American Mathematical Monthly,1975,82(10):985-992.
猜你喜欢
中国造纸(2022年8期)2022-11-24
青少年科技博览(中学版)(2022年1期)2022-03-28
一重技术(2021年5期)2022-01-18
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2020年10期)2020-02-07
铁道通信信号(2019年2期)2019-03-26
电子制作(2018年10期)2018-08-04
中国铸造装备与技术(2017年3期)2017-06-21
中国铁道科学(2015年6期)2015-06-21
中国铁道科学(2015年5期)2015-06-21
