
面向雷达高速目标检测的RFT快速实现方法
2018-06-07 07:52商哲然谭贤四曲智国李志淮
系统工程与电子技术 2018年6期
段 毅, 商哲然,2, 谭贤四, 曲智国, 李志淮
(1. 空军预警学院防空预警装备系, 湖北 武汉 430019; 2. 国防科技大学电子科学学院, 湖南 长沙 410073)
0 引 言
随着具有高、快、小等特点的高超声速目标的出现,传统的雷达检测技术遇到了严峻的挑战[1-2]。通过补偿脉冲间的相位变化来实现长时间相参积累可以显著提高检测性能[3-7]。但是,在相参积累时间内,目标高超声速运动带来的距离走动和多普勒模糊问题严重影响着传统方法,如动目标检测(moving target detection, MTD)的目标能量积累效果[8-11],必须消除上述影响以提高目标检测性能。
近年来,学者们提出了一些新的检测方法来解决目标回波包络的距离走动问题,实现目标能量的有效积累,典型方法有校正补偿类[12]的Keystone法[13-17]、相邻交叉相关函数(adjacent cross correlation function,ACCF)[18-19]、序列反转变换[20](sequence-reversing transform, SRT),搜索积累类[12]的Radon-Fourier变换(Radon Fourier transform,RFT)法[21-28]等。其中,RFT法有机地将MTD处理和Radon变换统一起来,直接沿目标初始距离和速度确定的直线轨迹对目标回波能量进行相参积累,取得了较好的检测性能,但是标准RFT[21-23]存在运算量大、实时性差、量化损失大的缺点。针对上述不足,文献[25, 29]提出了基于Chirp-Z变换(Chirp-Z transform, CZT)的RFT(CZT-RFT)算法。CZT-RFT算法的基本思想是,将RFT算法在频域利用CZT实现,从而显著提高了算法的运算速度和能量积累效果。但是,当存在多普勒模糊时,该方法需要对多普勒模糊数进行遍历搜索并作补偿处理,然后对多次补偿后的积累结果进行选大处理,以得到最终积累结果。当多普勒模糊数较大时,CZT-RFT算法的运算量将急剧增大;此外,多个补偿积累结果之间的选大处理在得到最大目标积累能量的同时也抬高了噪声电平,影响了检测性能。而现有警戒雷达,特别是地面警戒雷达,通常采用低重频工作模式,当探测以5~20 Ma速度飞行的高超声速目标时,多普勒模糊数将非常大,导致算法运算量急剧增加,上述方法难以直接应用。
为了解决上述问题,本文提出了一种改进的RFT快速实现方法——由粗到精(coarse-to-fine,CTF)的RFT算法(CTF-RFT),该方法采用CTF逐步缩小搜索范围的策略确定目标的多普勒模糊数,进而获得最终的目标能量积累结果,实现目标检测并确定目标的精确参数。与文献[25,29]的方法相比,该方法进一步降低了运算量,并解决了选大处理带来的噪声电平抬高的问题。理论分析和实验结果验证了本文方法的有效性。
1 RFT算法
假设雷达发射线性调频(linear frequency modulation,LFM)信号,考虑目标作高速匀速运动,则脉冲压缩后的回波信号可表示为
(1)

1.1 标准RFT算法
RFT是一种广义的MTD[21]。假设目标轨迹可由目标的初始距离和速度构成的二维坐标(R0,vr)决定,如图1(a)所示。RFT的变换公式为
(2)
由式(2)可知,当(R0,vr)=(R0i,vri)时,即搜索参数等于目标的真实参数时,则g(R0i,vri)出现峰值,如图1所示。

图1 RFT原理Fig.1 Principle of RFT
式(2)中的速度参数vri起到两个作用:一是决定了直线的斜率,即RFT沿哪条轨迹进行能量积累;二是对式(1)中的第2个指数项进行相位补偿,实现相参积累。一般来说,警戒雷达脉冲重复频率(pulse repetition frequency,PRF)fr较低,导致出现速度(或多普勒)模糊。令vr为目标真实径向速度,v0为目标的模糊速度,k0为多普勒模糊数,vb=λfr/2为第一盲速,则真实速度与模糊速度、盲速之间的关系为
vr=v0+kvb
(3)
当目标真实速度vr在[-vrmax,vrmax]内变化时,其模糊速度v0始终在[-vb/2,vb/2]中变化,多普勒模糊数k在[-Kmax,Kmax]间取值,使得回波的多普勒相位在不同模糊数的对应速度上都能得到补偿,但由于非真实模糊数k≠k0对应的积分直线不是目标的真实轨迹,积累的峰值只是目标的部分能量,使得RFT积累结果中沿速度维出现了周期性的盲速副瓣,周期为PRF对应的速度范围称为盲速区间,如图2所示。标准RFT算法在速度维[-vrmax,vrmax]进行穷尽搜索,导致算法运算量大。

图2 RFT积累结果示意图Fig.2 Result of RFT
1.2 CZT-RFT算法
CZT-RFT将整个速度搜索范围[-vrmax,vrmax]分解为2Kmax个不同多普勒模糊数对应的盲速区间,在单个盲速区间[-vb/2,vb/2]上利用CZT变换快速实现RFT算法,然后遍历2Kmax个多普勒模糊数并进行补偿处理得到2Kmax个积累结果,再对2Kmax个盲速区间的积累结果进行选大处理[7],得到最终积累结果以检测目标。
在单个盲速区间,CZT-RFT实现如下:
(4)
(5)
(6)
式(4)可通过CZT快速实现,式(5)可通过快速傅里叶逆变换(inverse fast Fourier transform,IFFT)实现。
CZT-RFT算法提高了单个盲速区间内的RFT运算速度,但多普勒模糊数较大时,需要对多普勒模糊数进行遍历搜索补偿,而每次补偿都需要计算一次CZT-RFT,导致算法运算量随着多普勒模糊数的增加迅速增大。而地面警戒雷达通常采用低PRF工作,当探测高速目标时(5~20 Ma),目标速度对应的模糊数非常大,需要进行多次补偿,降低了算法的实时性能。另外,多个不同多普勒模糊数对应的积累结果之间的选大处理,在得到目标最佳积累能量的同时也抬高了目标周围的噪声电平,影响了目标的检测性能,增加了后续恒虚警率检测(constant false alarm rate,CFAR)[30]处理的难度,如图3所示。
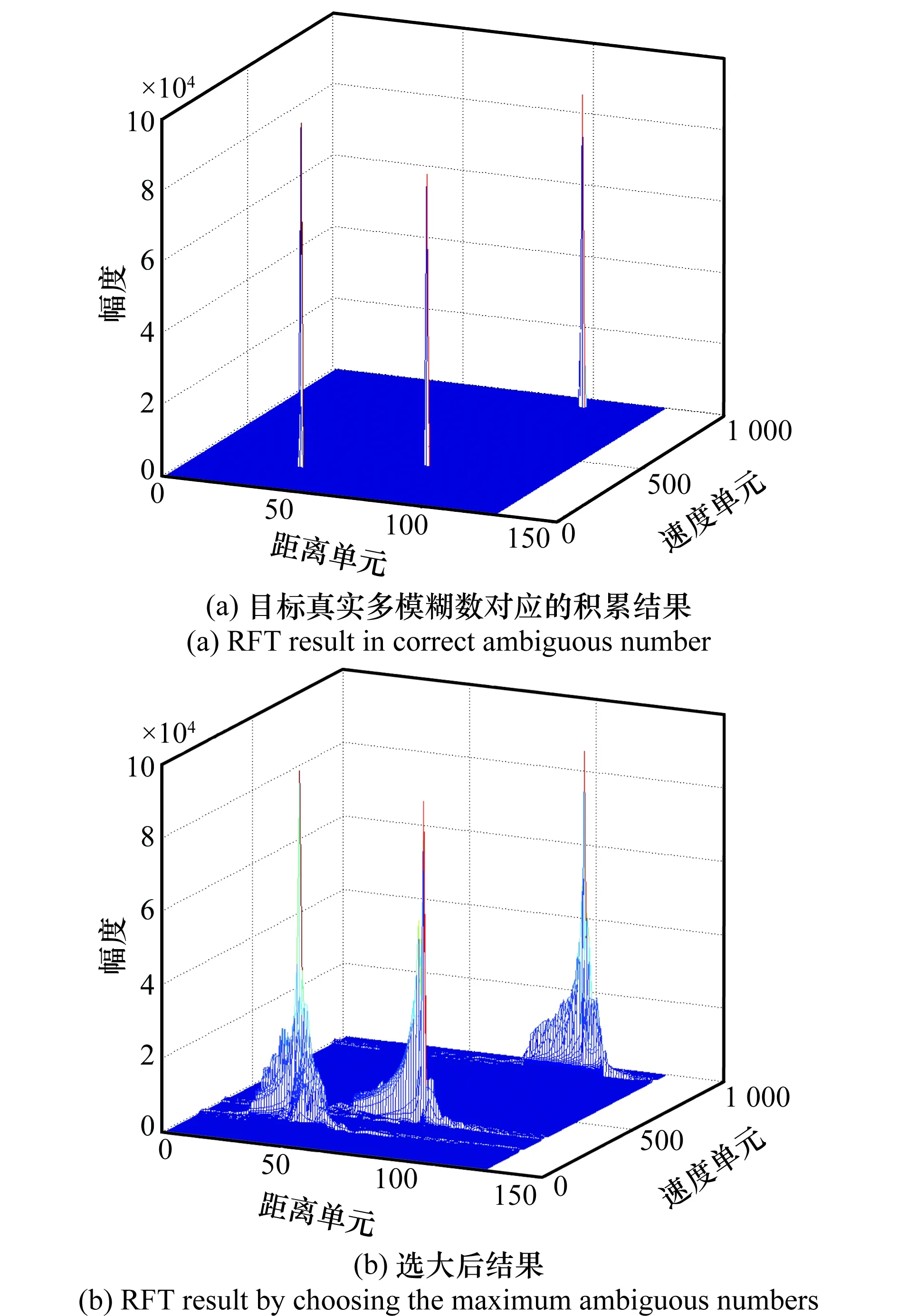
图3 多个多普勒模糊数选大处理的RFT积累结果Fig.3 RFT result by choosing the maximum from multiple ambiguous numbers
2 CTF-RFT快速算法
2.1 基本思想
CZT-RFT算法将标准RFT算法分解为单个盲速区间上G(R,v)的能量积累和多普勒模糊数k的穷尽搜索以及选大处理。只有当搜索参数与目标的真实参数完全相同时,即R=R0,v=v0,k=k0时才出现最大峰值,即主瓣。但根据式(3)及图2可知,当搜索的多普勒模糊数不等于目标的多普勒模糊数k≠k0时,在G(R0,v0)处也会形成峰值,即副瓣,主副瓣峰值比(primary lobe-to-sidelobe ratio, PSLR)[22,26]为
(7)
式中,λ为波长;M为脉冲积累个数;ρr为距离分辨率。
假设参数取值为λ=0.3 m,脉冲数M=1 000,目标速度为v=2 050 m/s,图4(a)给出了主副瓣峰值比PSLR与主副瓣模糊数之差Δk=|k-k0|之间的关系;令Δk=|k-k0|分别取1,2,3,图4(b)给出了PSLR随距离分辨率ρr的变化关系。由图4可以看出:PSLR与Δk=|k-k0|符合式(7)的变化规律,PSLR与Δk=|k-k0|成正比,与ρr成反比。在主瓣峰值一定的情况下,副瓣峰值与Δk=|k-k0|成反比、与ρr成正比,随Δk单调变化,ρr越大、与真实多普勒模糊数的差值Δk=|k-k0|越小,则多普勒模糊数k对应的盲速区间积累的副瓣峰值越高。另外,由图4还可以看出,当雷达的距离分辨率较低时,如当ρr=150 m时,Δk=1,2时的主副瓣比分别为1.7,2.9,也即相邻多普勒模糊数下积累的副瓣峰值仅比真实多普勒模糊数下积累的峰值低2.3 dB,4.6 dB,而且当距离分辨率降低时,这一数值还将进一步降低。这就启示我们,可以在损失很小信噪比的前提下对多普勒模糊数进行跨间隔搜索(Δk=1对应搜索间隔为3,Δk=2对应搜索间隔为5),从而避免了多普勒模糊数遍历搜索带来的冗余运算量。
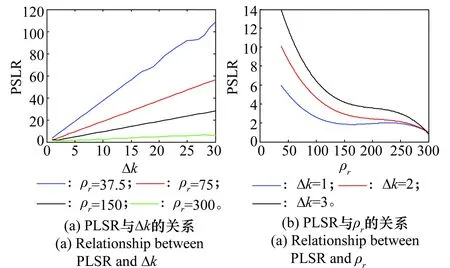
图4 主副瓣比变化规律Fig.4 Relationship between PLSR and Δk、ρr
2.2 算法实现
CTF-RFT检测算法的主要思路是,在多普勒模糊数维上进行跨间隔搜索,以降低运算量;并根据目标积累能量随多普勒模糊数之差Δk的单调变化规律来剔除虚假目标,以提高检测性能。
在粗检测阶段,首先对多普勒模糊数进行跨间隔粗搜索,然后基于CZT-RFT方法得到不同模糊数下目标在距离-多普勒维二维平面上的积累结果;然后对不同模糊数下的多个二维积累平面进行粗检测提取潜在目标,并将潜在目标的积累能量幅度沿模糊数维排列,通过比较同一潜在目标沿模糊数维的幅度变化规律来进一步剔除虚警,确定目标所在的模糊数区间和粗略参数;在精检测阶段,对于潜在目标所在大区间内的模糊数进行精细搜索,检测目标确定目标的精确参数。CTF-RFT算法具体实现流程如图5所示,主要包括以下几个步骤。
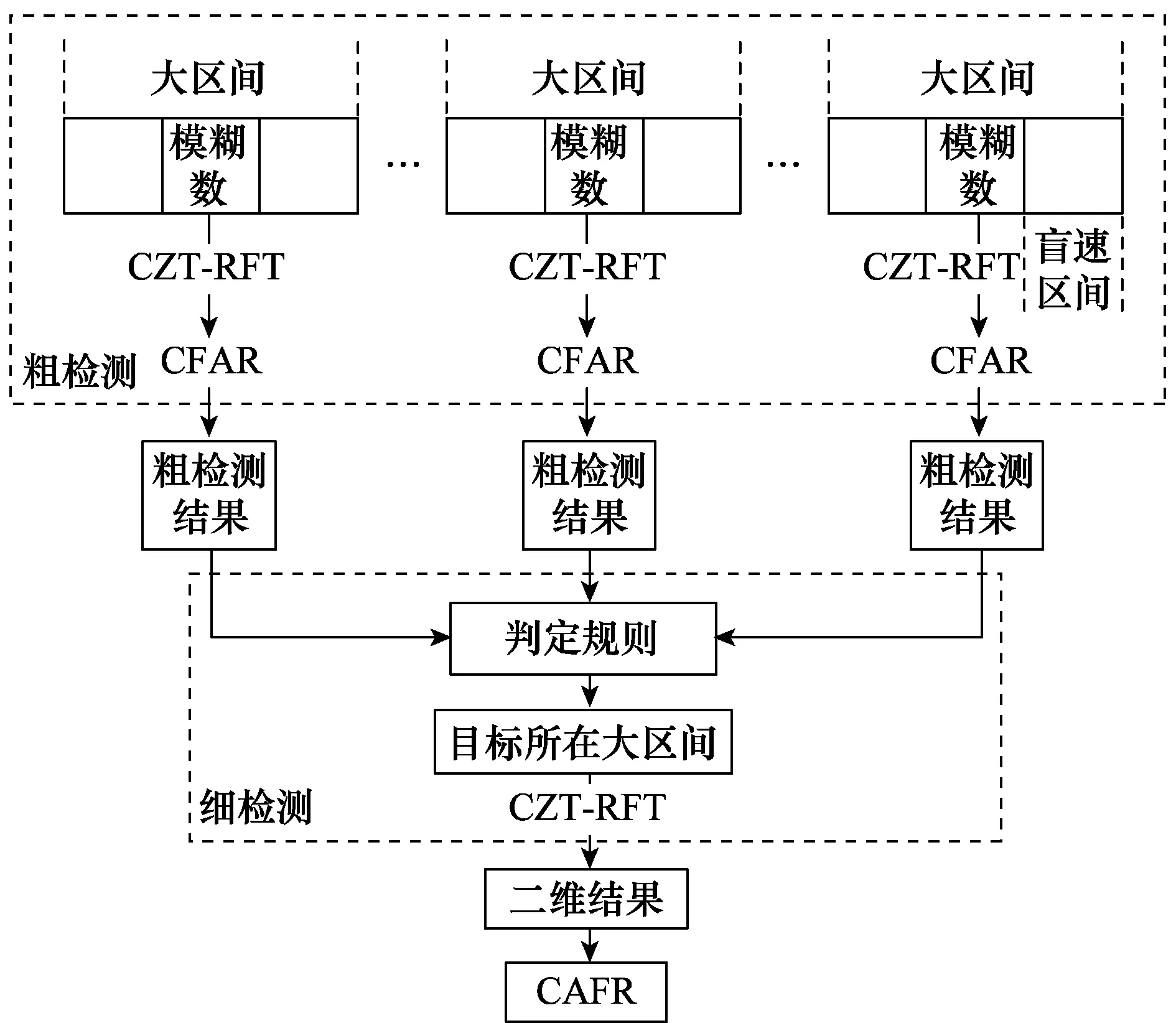
图5 CTF-RFT算法流程Fig.5 Flowchart of CTF-RFT
步骤1搜索区间划分。令Δl为多普勒模糊数的搜索间隔,若待搜索的多普勒模糊数区间为[-Kmax,Kmax],则将待搜索多普勒模糊数区间划分成(2Kmax+1)/Δl个大区间,依次编号为
I=[-Kmax/Δl],[-Kmax/Δl]+1,…,[Kmax/Δl]
式中,[·]表示取整运算。
步骤2积累能量计算。对于每个大区间I,取中心多普勒模糊数作为该区间的典型值,利用CZT-RFT方法计算目标能量在距离-速度二维平面上的能量积累结果gI(r,v)。
步骤3粗检测提取潜在目标。采用CFAR处理对得到的(2Kmax+1)/Δl个距离-速度二维积累结果gI(r,v)进行粗检测,提取出潜在目标,并记录相关参数信息,如幅度、距离、速度等信息。
步骤4潜在目标确认。将在距离-速度二维平面上位置相同的潜在目标的积累能量幅值沿多普勒模糊数维排列,根据副瓣峰值随Δk的单调变化规律确认目标。

∀i1,i2∈[imax-ΔI,imax+ΔI],|i1-imax|<|i2-imax|时

(8)
若式(8)成立,则确认该潜在目标为真实目标,并得到imax为该目标所在的多普勒模糊数大区间。
步骤5精搜索确定精确参数。对于确认目标的多普勒模糊数大区间imax内的每个模糊数进行CZT-RFT计算,得到二维积累结果后进行CFAR处理得到目标的精确参数。

2.3 算法性能分析
CTF-RFT算法采用跨间隔搜索多普勒模糊数,极大地降低了CZT-RFT方法的运算量,但同时也带来了一定的信噪比损失。下面从信噪比损失和运算量两方面分析算法的性能。
由图5可见,以Δl为间隔对多普勒模糊数进行粗搜索时,当目标真实多普勒模糊数不在大区间的中心模糊数上时,其积累峰值会降低,导致带来信噪比损失。由于目标的多普勒模糊数在每个大区间上服从均匀分布的,根据式(7),跨间隔搜索带来的信噪比损失为
(9)
令N,M分别表示采样单元数和脉冲积累数。对于CZT-RFT算法,单次CZT-RFT需要乘法次数为(3+log2M)NM,单次Global-CFAR求均值需加法次数为NM-1[31]。当遍历搜索多普勒模糊数,CZT-RFT算法总的运算量为
(2Kmax+1)(3+log2M)NM
而CTF-RFT的运算量为
式中,It为所有目标速度落入的大区间个数。
则两种算法运算量之比为
(10)
在N=128,M=1 000参数下,运算量之比与信噪比损失关系如图6所示。可以看出,信噪比的损失换来了运算量的降低。另外,在损失相同信噪比的前提下,搜索的多普勒模糊数越多,与CZT-RFT相比减少的运算量越多。

图6 运算量之比与信噪比损失关系Fig.6 Relationship between ratio of computation and SNR loss
3 实验结果与分析
采用仿真实验分析CTF-RFT的性能,并与CZT-RFT算法进行比较。实验环境为:计算机CPU为i7-3370,主频3.4 GHz,内存为16 GB,Matlab8.3。
雷达和目标参数为:fc=1 GHz,B=1 MHz,Tp=127 μs,fs=1 MHz,fp=1 000 Hz,ρr=150 m,积累处理时间为TCIT=1 s。目标速度vT1=570 m/s,vT2=1 060 m/s,vT3=2 050 m/s,初始相对距离单元为40,100,80,对应模糊数为8,15,28,Δl=3,ΔI=3,Kmax=30。目标距离走动情况如图7所示。
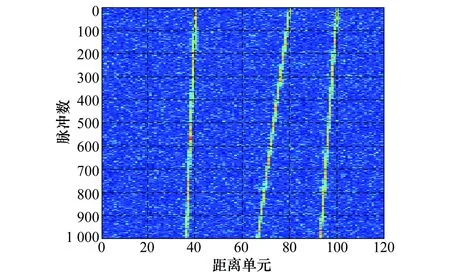
图7 目标距离走动示意图Fig.7 Illustration of across range unit (ARU)
3.1 实验1
实验1旨在验证CTF-RFT算法的性能。图8为本文方法的粗检测示意图,其中图8(a)为补偿多普勒模糊数等于15时的积累结果,图8(b)为对图8(a)进行粗检测得到的结果。

图8 CTF-RFT粗检测结果Fig.8 Coarse detecion of CTF-RFT
对多个不同大区间上的多普勒模糊数补偿后进行粗检测得到多个潜在目标,将同一距离单元、同一速度单元上的多个潜在目标的积累能量沿多普勒模糊数维进行排列,如图9所示。

图9 潜在目标的积累能量在多普勒模糊数维的变化规律Fig.9 Variation of potential targets on dimension of Doppler ambiguous number
由图9可以看出,真实目标的积累能量沿着多普勒模糊数的变化规律与图2分析一致,采用式(8)的判定规则可消除虚假目标,检测出真实目标。通过对真实目标积累能量最大的大区间进行进一步精细搜索可以得到最终结果,如图10所示。

图10 CTF-RFT精检测结果Fig.10 Fine detecion results of CTF-RFT
3.2 实验2
实验2比较CTF-RFT和CZT-RFT的检测性能和时间性能。
仿真参数不变,以目标3为例,假设其速度在区间[2 025,2 175]m/s随机取值。设定虚警概率为Pfa=10-6,图11给出了经过2 000次蒙特卡罗仿真得到的检测概率Pd与信噪比SNR的关系,图12给出了两种算法在不同盲速区间数量下的平均耗时。
由实验结果可以看出,CTF-RFT取得了与CZT-RFT算法几乎相同的检测性能,但是其平均耗时仅为CZT-RFT的0.412倍(搜索盲速区间为61时)。由图12还可以看出,当目标的多普勒模糊数越大时,也即待搜索的盲速区间数量越大时,与CZT-RFT算法相比,CTF-RFT算法节省的运算量也就越多。另外,实验中我们设定多普勒模糊数的搜索间隔为Δl=3,当增大搜索间隔Δl时,可以进一步降低算法运算量,但同时也会带来一定的检测性能损失。

图11 虚警概率为10-6时目标3检测概率Fig.11 Pd of target 3 with Pfa=10-6
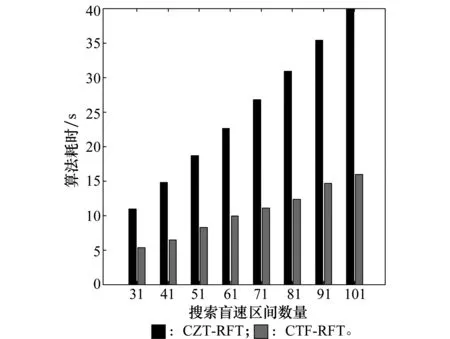
图12 两种算法耗时统计Fig.12 Time consumption of CZT-RFT and CTF-RFT
4 结束语
本文提出了一种CTF-RFT算法,采用对多普勒模糊数跨间隔搜索的策略来降低CZF-RFT算法的运算量,算法分为粗检测和精检测两个阶段,粗检测完成潜在目标的提取和参数的粗略估计,精检测消除虚警并最终检测出目标,得到目标的准确参数。理论分析与仿真实验表明,与CZT-RFT相比,CTF-RFT在几乎不降低检测性能的同时,进一步减少了运算量。另外,通过对CTF-RFT中模糊数搜索间隔的灵活调整可进一步提高CTF-RFT算的运算速度。
参考文献:
[1] 战立晓,汤子跃,朱振波. 一种米波相控阵雷达四代机目标检测算法[J]. 电子与信息学报,2013,35(5): 1163-1169.
ZHAN L X, TANG Z Y, ZHU Z B. The fourth generation fighters detection algorithm for metric-band phased array radar[J].Journal of Electronics and Information Technology,2013,35(5):1163-1169.
[2] 勒松阳. 临近空间高速机动目标检测技术研究[D]. 西安: 西安电子科技大学, 2014.
LE S Y. Research on detection methods of high-speed maneuvering target in near space[D]. Xian: Xidian University, 2014.
[3] XING M D, SU J H, WANG G Y, et al. New parameter estimation and detection algorithm for high speed small target[J]. IEEE Trans.on Aerospace Electronic System, 2011, 47(1): 214-224.
[4] RAO X, TAO H H, SU J, et al. Axis rotation MTD algorithm for weak target detection[J].Digital Signal Processing,2014,26(1): 81-86.
[5] LI X L, CUI G L, YI W, et al. Coherent integration for maneuvering target detection based on Radon-Lv’s distribution[J].IEEE Signal Processing Letters, 2015, 22 (9): 1467-1471.
[6] SU J, XING M, WANG G, et al. High-speed multi-target detection with narrow band radar[J].IET Radar Sonar Navigation, 2010,4(4):595-603.
[7] CHEN X L, HUANG Y, LIU N B, et al. Radon-fractional ambiguity function-based detection method of low-observable maneuvering target[J]. IEEE Trans.on Aerospace and Electronic Systems, 2015, 51(2): 815-833.
[8] TAO R, ZHANG N, WANG Y. Analysing and compensating the effects of range and Doppler frequency migrations in linear frequency modulation pulse compression radar[J].IET Radar Sonar Navigation, 2011, 5(1): 12-22.
[9] PANG C, TAO S, TAO R, et al. Detection of high-speed and accelerated target based on the linear frequency modulation radar[J].IET Radar Sonar Navigation, 2014, 8(1): 37-47.
[10] LI X L, CUI G L, YI W, et al. Range migration correction for maneuvering target based on generalized keystone transform[C]∥Proc.of the IEEE Radar Conference, 2015: 95-99.
[11] HUANG P H, LIAO G S, YANG Z W, et al. An approach for refocusing of ground fast-moving target and high-order motion parameter estimation using radon-high-order time-chirp rate transform[J]. Digitial Signal Processing, 2016, 48(C): 333-348.
[12] 商哲然,谭贤四,曲智国,等.高超声速目标雷达检测方法综述[J].现代雷达,2017, 39(1):1-8.
SHANG Z R, TAN X S, QU Z G, et al. Review on radar detection technology of hypersonic targets[J]. Modern Radar, 2017, 39(1): 1-8.
[13] PERRY R P, DIPIETRO R C, FANTE R L. SAR imaging of moving targets[J]. IEEE Trans.on Aerospace Electronic Systems, 1999, 35(1): 188-200.
[14] ZHU D Y, LI Y, ZHU Z D. A keystone transform without interpolation for SAR ground moving-target imaging[J]. IEEE Geoscience and Remote Sensing Letters, 2007, 4 (1): 18-22.
[15] LI G, XIA X G, PENG Y N. Doppler keystone transform: an approach suitable for parallel implementation of SAR moving target imaging[J].IEEE Geoscience and Remote Sensing Letters, 2008, 5 (4): 573-577.
[16] YUAN S J, WU T, MAO M, et al. Application research of keystone transform in weak high-speed target detection in low-PRF narrowband chirp radar[C]∥Proc.of the 9th International Conference on Signal Processing, 2008: 2452-2456.
[17] 柏业超,高玉祥,张兴敢.基于Keystone变换的高速运动目标检测方法研究[J].南京大学学报(自然科学),2014,50(1):30-34.
BO Y C, GAO Y X, ZHANG X G. Rearch on high-velocity targets detection based on keystone transform[J].Journal of Nanjing University (Natural Sciences). 2014, 50(1): 30-34.
[18] LI X L, CUI G L, YI W, et al. A fast maneuvering target motion parameters estimation algorithm based on ACCF[J]. IEEE Signal Processing Letters, 2015, 22(3): 270-274.
[19] LI X L, CUI G L, KONG L J, et al. Fast non-searching method for maneuvering target detection and motion parameters estimation[J].IEEE Trans.on Signal Processing,2015,63(10):1-33.
[20] LI X L, CUI G L, YI W, et al. Sequence-reversing transform-based coherent integration for high-speed target detection[J].IEEE Trans.on Aerospace and Electronic Systems, 2017,53(3): 1573-1580.
[21] XU J, YU J, PENG Y N, et al. Radon-fourier transform for radar target detection, I-generalized Doppler filter bank[J].IEEE Trans.on Aerospace and Electronic,2011,47(2):1183-1202.
[22] XU J, YU J, PENG Y N, et al. Radon-Fourier transform for radar target detection (II) blind speed sidelobe suppression[J].IEEE Trans.on Aerospace and Electronic,2011, 47(4): 2473-2489.
[23] XU J, XIA X G, PENG S B, et al. Radar maneuvering target motion estimation based on generalized radon-Fourier transform[J].IEEE Trans.on Signal Processing, 2012, 60(12): 6190-6201.
[24] CHEN X L, GUAN J, LIU N B, et al. Maneuvering target detection via Radon-fractional Fourier transform-based long-time coherent integration[J].IEEE Trans.on Signal Processing, 2014, 62(4): 939-953.
[25] YU J, XU J, PENG Y N, et al. Radon-Fourier transform for radar target detection (III): optimality and fast implementations[J].IEEE Trans.on Aerospace and Electronic Systems, 2012, 48(2):991-1004.
[26] QIAN L C, XU J, SUN W F, et al. Efficient approach of generalized RFT based on PSO[C]∥Proc.of the 12th IEEE International Conference on Computer and Information Technology, 2013:511-516.
[27] QIAN L C, XU J, XIA X G, et al. Wideband-scaled Radon-Fourier transform for high-speed radar target detection[J]. IET Radar Sonar & Navigation, 2014, 8(5):501-512.
[28] QIAN L C, XU J, XIA X G, et al. Fast implementation of generalised Radon-Fourier transform for manoeuvring radar target detection[J]. Electronics Letters, 2012, 48(22):1427-1428.
[29] 吴兆平,符渭波,郑纪彬,等.基于快速Radon-Fourier变换的雷达高速目标检测[J].电子与信息学报,2012,34(8):1871-1886.
WU Z P, FU W B, ZHENG J B, et al. High speed radar target detection based on fast radon-Fourier transform[J].Journal of Electronics and Information Technology,2012, 34(8):1871-1886.
[30] 何友,关键,孟祥伟. 雷达自动检测和CFAR处理方法综述[J]. 系统工程与电子技术,2001, 23(1) :9-14.
HE Y, GUAN J, MENG X W. Survey of automatic radar detection and CFAR processing[J].Systems Engineering and Electronics, 2001, 23(1):9-14.
[31] 张军,高贵,周蝶飞,等. SAR图像机动目标检测的两种CFAR算法对比研究[J].信号处理,2008, 24(1): 78-82.
ZHANG J, GAO G, ZHOU D F, et al. Comparison on two CFAR algorithms of vehicle target detection in SAR images[J].Signal Processing,2008, 24(1): 78-82.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
现代仪器与医疗(2022年1期)2022-04-19
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2019年9期)2019-10-26
中学生理科应试(2019年3期)2019-07-08
湖南教育·C版(2018年3期)2018-06-05
雷达学报(2017年3期)2018-01-19
福建中学数学(2016年7期)2016-12-03
雷达与对抗(2015年3期)2015-12-09
雷达与对抗(2015年3期)2015-12-09
