
基于ONM的无人机信息支援远程体系作战能力评估
2018-06-07 07:53陈士涛李大喜赵保军
系统工程与电子技术 2018年6期
陈士涛, 李大喜, 赵保军
(1. 空军工程大学装备管理与无人机工程学院, 陕西 西安 710051;2. 空军工程大学防空反导学院, 陕西 西安 710051)
0 引 言
无人机信息支援下的远程体系作战具有多类(型)装备协同作战的特点,利用DoDAF2.0标准生成的体系结构模型难以体现装备体系的复杂性、连通性和网络化特性,难以对体系的作战能力进行准确评估。针对缺乏可靠体系作战能力评估方法,难以对作战过程进行统筹分析和优化的问题,本文引入OODA环思想,构建作战网络模型(operation network model,ONM),力求弥补传统装备体系建模存在的不足,准确评估远程作战体系的作战能力及制约条件。
1 作战概念与OODA建模
1.1 顶层作战概念
无人机在执行信息支援作战任务时,能够与攻击机、远程轰炸机、舰艇、弹道导弹系统配合,为远程作战武器提供预警信息和必要的引导指令,在远程作战体系中担负“多功能导引头”和“可伸缩望远镜”的角色,提升体系在复杂环境下的远程作战能力,作战概念如图1所示。
图1明确了各作战实体间的交互关系,描述了各作战实体相应的活动,但对作战过程的状态演进和关系转换描述不够清晰,因此借助OODA作战环模型来描述作战实体间的信息交互和作战活动。

图1 顶层作战概念Fig.1 Top-level operational concept
1.2 OODA作战环模型
将无人机信息支援远程体系作战划分为观察、判断、决策、行动等4个环节,作战过程即作战实体循环OODA环的过程。
观察(Observe):无人机根据任务需要装载合成孔径雷达、长焦倾斜CCD相机、高空CCD侦察相机、高空红外行扫仪、多光谱侦察相机和电子对抗侦察系统等任务设备,情报总站通过云网络控制无人机对目标区域进行持续侦察监视。
判断(Orient):无人机对指定区域进行成像,将获取的图像信息上传至云网络。情报总站从云网络下载图像信息,进行信息融合和目标检测识别,获取目标数量、目标类型、作战样式、作战企图等信息。
决策(Decide):情报总站生成情报产品,将情报发送至联合指挥机构。联合指挥机构将观察和判断两个环节获取的目标信息进行融合,结合战场态势,优化作战方案。
行动(Act):攻击机、远程轰炸机、舰艇、弹道导弹系统等作战实体实施联合指挥机构制定的作战方案,在作战过程中实时向观察、判断、决策环节反馈作战信息。无人机信息支援下的远程作战体系OODA环模型如图2所示[1-3]。
2 作战网络建模
2.1 作战网络的节点建模
无人机信息支援远程体系作战网络是基于远程作战体系和无人机抽象得到的网络,因此要将作战过程中的各类(型)装备抽象成作战网络的节点。依据装备在远程作战中担负的任务,区分为侦察类节点(U)、指控类节点(D)、打击类节点(A)和目标类节点(T)等4类装备节点[4-8]。远程作战中,各类(型)装备往往不只是一个装备平台,而是一个武器系统,为易于建模,将其抽象为单个装备节点[9]。如:无人机系统是包括无人机平台、地面站、保障系统等的复杂武器系统,建模时将其抽象为侦察类节点。作战网络的主要装备节点如表1所示。
图2 远程作战体系OODA模型Fig.2 OODA model of long-range combat system
作战网络节点建模需要考虑各节点与其他节点间完成信息流(或物质流、能量流)时,哪些装备的相关指标对过程产生影响[10-14]。一方面,装备节点的一个指标通常可能影响该节点的多项能力,如:无人机的最大探测距离对无人机节点的侦察、监视、识别等能力都有较大影响;另一方面,同一装备在执行不同作战活动时所关注的能力也不完全相同,如:无人机在对目标进行侦察时,主要关注侦察能力;在与情报总站进行数据传输时,主要关注数据传输能力[15-17]。
表1 作战网络节点
根据作战概念,将无人机信息支援远程体系作战能力分解为预警探测侦察、定位引导攻击、精确火力分配、信息链路中继、抵近压制干扰和作战效果评估等6类,生成DoDAF2.0标准的能力依赖模型(CV-4)如图3所示。

图3 体系能力依赖模型Fig.3 Capacity dependent model of system
在此基础上,对作战网络中的4类节点进行“能力—指标”分解[18],如图4所示。
2.2 作战网络的边建模
远程作战中,各作战实体间由信息流(或能量流、物质流)形成一系列作战活动,每个作战活动可以抽象为一条单向边[19-23]。如:无人机将侦察到的航母信息传输给情报总站, 就是一个由信息流形成的作战活动,可以抽象为一条由无人机向情报总站的单向边。

图4 作战网络节点“能力—指标”分解Fig.4 Ability-index decomposition of nodes
依据无人机信息支援远程体系作战网络的边代表的作战活动,分别对作战网络的侦察监视边、数据传输边、信息处理边和打击边建模。
(1) 侦察监视边
侦察监视是无人机在信息支援作战中探测、发现、监视和识别目标的过程。对侦察监视边建模如下[24-26]:
(1)

(2) 数据传输边

(2)

(3) 信息处理边
指控类节点需要对作战计划进行决策,其前提就是将从侦察类节点获取的信息进行处理,这类边即为信息处理边。影响信息处理能力的因素主要是信息处理精确度、吞吐率和响应时间。对信息处理边建模如下:
(3)

(4) 打击边

(4)

3 作战能力评估
作战环是体系中侦察、指控、打击类节点与目标类节点构成的闭合回路。由图1中无人机信息支援远程体系作战概念可知,作战网络由多个包含不同节点的作战环构成。
3.1 作战环数量计算
作战环是作战体系的基本环节,其数量反映了作战体系备选方案的多少,体现了无人机信息支援远程体系作战的核心能力。在作战过程中,目标一般是一个航母战斗群或军事基地,即目标类节点数量为1。而体系化作战下通常有多个侦察监视装备和远程打击武器参与作战。因此,需要梳理作战网络的作战环数量,以此作为作战能力评估的基础[28]。
用N1、N2、N3分别表示打击类节点、侦察类节点和作战环的数量,作战网络的作战环数量计算方法如图5所示。
3.2 基于信息熵的作战能力评估模型
通过计算作战环中信息的不确定性(即信息熵),可以评估体系的作战能力。如果某时刻t,目标所在的作战环记作op(t),用H(op)(t)和E(op)(t)分别表示作战环的不确定性和作战能力,且满足E(op)(t)∈[0,1],根据不确定性理论,E(op)(t)和H(op)(t)间存在如下关系:
H(op)(t)=-logE(op)(t)
(5)
即
E(op)(t)=e-H(op)(t)
(6)
如果得到作战环的不确定性H(op)(t),就可以求出该作战环t时刻的作战能力E(op)(t)。
(1) 单作战环在t时刻的能力评估
依据对远程体系作战网络边类型的分析,某时刻t对目标的不确定性主要包括:无人机侦察情报不确定性H1(t)、数据传输过程不确定性H2(t)、信息处理过程不确定性H3(t)、联合指挥机构火力分配不确定性H4(t)和远程打击武器打击过程不确定性H5(t),单作战环在t时刻的不确定性为5方面不确定性之和。
根据对远程体系作战过程的分析,对目标的5个方面不确定性存在重要程度的差异。情报获取和传输是作战的首要环节,也是目前敌方打击的重点;而对于信息处理、火力分配和火力打击的不确定性,可以通过采用其他手段一定程度上降低。按照重要程度排序,无人机侦察情报不确定性和数据传输过程不确定性的重要程度较高,信息处理过程不确定性和联合指挥机构火力分配不确定性次之,最后是远程打击武器打击过程不确定性。
在远程体系作战过程中,为满足OODA环的快速闭环,每一环节在执行过程中实际上忽略了上一环节的不确定性影响。即虽然每一环节均存在不确定性,但由于不确定性是概率统计,对于单次作战过程特定时刻来说,该环节事件发生的概率是确定的,要么是1,要么是0。如果是1,则意味着该环节的信息是确定的,可以进入作战的下一环节;而如果是0,则意味着OODA环断链。从每一环节对最终作战结果的影响来看,是一个确定性问题,可以不考虑作战过程中各环节不确定性的传导问题。
根据信息熵理论,各方面不确定性如下:
Hl(t)=-(1-pl(t))log(1-pl(t)-
pl(t)logpl(t),l=1,2,…,5
(7)
式中,pl(t)表示不确定信息随时间的概率分布,p1(t)表示无人机对目标位置进行侦察的圆概率误差随时间的分布。将式(7)代入式(6),可以得到单作战环在t时刻对目标的作战能力。
(2)t时刻对同一目标的作战环能力累积
t时刻,如果作战网络中包含m个作战环,则将与目标关联的作战环间关系近似于电路的并联关系,将单作战环的不确定性看作电阻,则t时刻对目标的总不确定性H(op)(t)[29]为
(8)
由式(8)可知,t时刻经过目标的作战环越多,则总不确定性越小,作战能力越高。将式(8)代入式(6),可以得出t时刻对所有作战环的能力累积。
(3) 对同一目标的全时域作战能力累积
如果某时刻t1的作战环为n个,不确定性为Hn(op)(t1),t2时刻的作战环为n+1个,新增的作战环t2时刻的不确定性为H1(op)(t2),则t2时刻的总不确定性为
(9)
作战环数量增加时,将增加的作战环的不确定性和原有作战环的累积不确定性并联,就可以得到总的不确定性,进而得到作战体系的全时域作战能力。
4 实例分析
4.1 作战环能力评估
为简化分析,合理假设目标只有航母战斗群或军事基地中的1个,将信息处理平台和情报总站归为1个节点。在无人机信息支援条件下,针对单个目标的作战网络如图6所示。
在图6的作战网络中,共有4条双向边:D2-D3与D3-D2合成为1条双向边;D2-U1与U1-D2合成为1条双向边;D2-U2与U2-D2合成为1条双向边;U2-U1与U1-U2合成为1条双向边。
作战能力评估时,需要说明以下几点:
(1) 作战网络节点建模时,主要建立装备的功能模型,如:目标类节点中航母战斗群只考虑两自由度的移动,暂不考虑航母战斗群的防空反导作战能力。
(2) 作战网络边建模时,对指控类节点间的边,只考虑通信关系,不考虑其对信息不确定性的影响。
(3) 计算各作战环不确定性时,无人机与目标间主要考虑最大探测距离、分辨率和识别概率;指控装备和目标间主要考虑信息处理准确率和信息处理吞吐率;打击类装备与目标间主要考虑杀伤区半径和单发杀伤概率。
(4) 暂不考虑无人机与指控装备毁伤或失效等情况,打击类节点部署变化时,无人机与指控装备的信息熵保持不变。
研究对象选取如表2所示。
表2 体系作战研究对象
根据表2中研究对象的战技指标,结合节点间相互关系,计算作战网络中各作战环的能力值和信息熵如表3所示[30]。
表3 作战环的能力值及信息熵
4.2 体系作战能力评估
将表3中作战环的信息熵代入式(9)和式(6),得到体系远程作战能力:
e-0.035 4=0.965 2
将表3中各作战环能力生成曲线图,如图7所示。
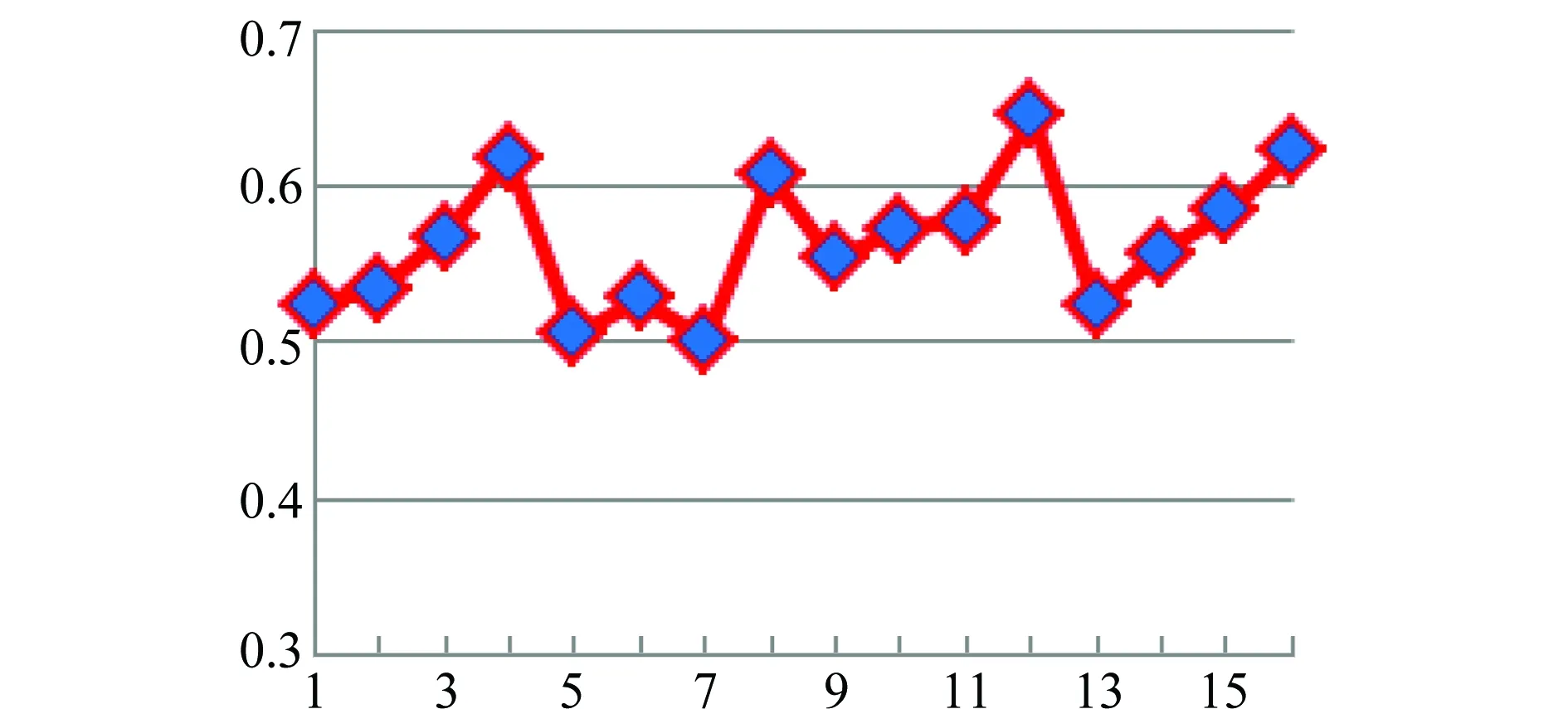
图7 作战环能力曲线Fig.7 Ability curve of operation loops
分析表3和图7可得以下结论:
(1) 作战环4、8、12、16的作战能力较其他作战环更大。原因分析:基于攻防双方力量部署和装备性能水平,与攻击机A1、远程轰炸机A2和舰艇A3相比,弹道导弹系统A4对远程作战影响更大,在远程作战中可发挥更大的作用。
(2) 作战环9~16较作战环1~8的作战能力整体略大。原因分析:情报总站融合无人机U1和U2的侦察情报,可以获取更准确的目标信息,降低作战环的不确定性,提升作战环的能力。但由于在信息处理过程中增加作战环的长度,融入2架无人机的不确定性,一定程度上又增大了作战环的不确定性,使能力提升有限。因此,提升无人机性能指标,降低信息的不确定性,是远程信息支援体系作战能力提升的关键点。
(3) 作战环9~16同时包括无人机U1和U2,以作战环9(T-U1-U2-D2-D3-A1-T)和作战环10(T-U2-U1-D2-D3-A1-T)为例,由于作战环中引入U1和U2的信息流程不同,生成的作战能力有所区别。因此,根据战场态势变化,合理规划长航时侦察无人机和察打一体无人机接入信息链路的顺序可以降低作战环的不确定性,提升作战能力。
5 结 论
本文对无人机信息支援远程体系作战网络建模的方法进行了探索,对体系作战能力评估进行了尝试,取得了一些结论,可以为作战体系优化和无人机装备发展提供需求牵引和发展借鉴。在作战网络建模过程中,未考虑一个节点同时承担多项作战任务的情况,如察打一体无人机不仅具备侦察监视能力,同时也具备对时敏目标的快速打击能力。对于这类节点的建模方法,需要修正作战网络模型使其更符合实际,这将是下一步研究的方向。
参考文献:
[1] 张昱, 张明智, 杨镜宇. 一种基于OODA环的武器装备体系建模方法[J]. 系统仿真学报, 2013, 25(8): 6-12.
ZHANG Y, ZHNAG M Z, YANG J Y. Modeling method for weapon system of systems based on OODA loop[J]. Journal of System Simulation, 2013, 25(8): 6-12.
[2] DERELI T, DAS G S. A hybrid bee(s) algorithm for solving container loading problems[J]. Applied Soft Computing, 2011, 11(2): 2854-2862.
[3] HORNG M H, JIANG T W. Image vector quantization algorithm via honey bee mating optimization[J]. Expert Systems with Applications, 2011, 38(3): 1382-1392.
[4] CAO W, YANG D. Adaptive optimal control approximation for solving a fourth-order elliptic variational inequality[J]. Computers and Mathematics with Applications,2014,66(12):2517-2531.
[5] SCHIELA A. An interior point method in function space for the efficient solution of state constrained optimal control problems[J]. Mathematical Programming, 2013, 138(2): 83-114.
[6] COORAY D, KOUROSHFAR E, MALEK S, et al. Proactive self-adaptation for improving the reliability of mission-critical, embedded, and mobile software[J]. IEEE Trans.on Software Engineering, 2013, 39(12): 1714-1735.
[7] DE LEON-ALDACO S E, CALLEJA H, AGUAYO A J. Reliability and mission profiles of photovoltaic systems: a FIDES approach[J]. IEEE Trans.on Power Electronics, 2014, 30(5): 2578-2586.
[8] LEVITIN G, XING L, AMARI S V, et al. Reliability of nonrepairable phased-mission systems with common cause failures[J]. IEEE Trans.on Systems, Man, and Cybernetics Part A: Systems and Humans, 2013, 43(4): 967-978.
[9] 芦荻, 商慧琳. 基于反导作战环的装备作战网络能力评估[J]. 太赫兹科学与电子信息学报, 2016, 14(3): 372-377.
LU D, SHANG H L. Assessment of equipment operation network capability based on the anti-missile operation loops[J]. Journal of Terahertz Science and Electronic Information Technology, 2016, 14(3): 372-377.
[10] Department of Defense (DOD). Unmanned systems integrated roadmap FY2013-2038[Z]. Department of Defense: Office of the Secretary of Defense Unmanned Systems Roadmap, 2013.
[11] KIM D H, LEE K, PARK M Y, et al. UAV-based localization scheme for battlefield environments[C]∥Proc.of the Military Communications Conference, 2013: 562-567.
[12] MARTIN A Y. Unmanned maritime vehicles: technology evolution and implications[J]. Marine Technology Society Journal, 2013, 47(5): 72-83.
[13] HAQUE M, EGERSTEDT M, RAHMANI A. Multilevel coalition formation strategy for suppression of enemy air defenses missions[J]. Journal of Aerospace Information Systems, 2013, 10(6): 287-296.
[14] BASER M, YORULMAZ S, AKGÜL S. The role of unmanned aerial system(UAS) in decision process by operational environment's risk level[C]∥Proc.of the International Conference on Unmanned Aircraft Systems, 2013: 160-166.
[15] JEONG B M, HA J S, CHOI H L. MDP based mission planning for multi-UAV persistent surveillance[C]∥Proc.of the 14th International Conference on Control, Automation and Systems, 2014: 831-834.
[16] LI Y W, LI B A. Research of multiple UAVs task allocation based on improved contract net[C]∥Proc.of the Trans.on Advanced Materials Research,2013:439-444.
[17] KIM M G, SHIN S H, LEE E B, et al. Modified consensus based auction algorithm for task allocation of multiple unmanned aerial vehicle[J]. Journal of the Korea Society for Simulation, 2014, 23(4): 197-202.
[18] 芦荻. 反导装备体系作战网络建模方法研究[J]. 现代计算机, 2016, 3(9): 13-16.
LU D. Research on anti-missile armament system-of-systems operation network modeling[J].Modern Computer,2016,3(9):13-16.
[19] MOON S, OH E, SHIM D H. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1/4): 303-313.
[20] SOURAVLIAS D, PARSOPOULOS K E. Particle swarm optimization with neighborhood based budget allocation[J]. International Journal of Machine Learning and Cybernetics, 2014, 44(3):1-27.
[21] ZAZA T, RICHARDS A. Ant colony optimization for routing and tasking problems for teams of UAVs[C]∥Proc.of the UKACC International Conference on Control, 2014: 652-655.
[22] OZALP N, SAHINGOZ O K. Optimal UAV path planning in a 3D threat environment by using parallel evolutionary algorithms[C]∥Proc.of the International Conference on Unmanned Aircraft Systems, 2013: 308-317.
[23] KARIMI J, POURTAKDOUST S H. Optimal maneuver-based motion planning over terrain and threats using a dynamic hybrid PSO algorithm[J]. Aerospace Science and Technology, 2013, 26(1): 60-71.
[24] ALEJO D, COBANO J A, HEREDIA G, et al. Particle swarm optimization for collision free 4D trajectory planning in unmanned aerial vehicles[C]∥Proc.of the International Conference on Unmanned Aircraft Systems, 2013: 298-307.
[25] FU Y, DING M, ZHOU C, et al. Route planning for unmanned aerial vehicle (UAV) on the sea using hybrid differential evolution and quantum-behaved particle swarm optimization[J]. IEEE Trans.on Systems, Man, and Cybernetics: Systems, 2013, 43(6): 1451-1465.
[26] DICHEVA S, BESTAOUI Y. Three-dimensional dynamic mission planning for an airborne launch vehicle[J]. Journal of Aerospace Information Systems, 2014, 11(2): 98-106.
[27] KOK J, GONZALEZ L F, KELSON N. FPGA implementation of an evolutionary algorithm for autonomous unmanned aerial vehicle on-board path planning[J]. IEEE Trans.on Evolutionary Computation, 2013, 17(2): 272-281.
[28] 商慧琳.武器装备体系作战网络建模及能力评估方法研究[D]. 长沙: 国防科学技术大学, 2013.
SHANG H L. Research on armament system-of-systems operation network modeling and capability evaluation methods[D]. Changsha: National University of Defense Technology, 2013.
[29] 张国强, 刘小荷, 蒋方婷. 基于“作战环”的区域反导装备体系效能评估[J]. 系统工程, 2016, 34(5): 154-158.
ZHANG G Q, LIU X H, JIANG F T. Effectiveness evaluation for TBDES based on operation loop[J]. Systems Engineering, 2016, 34(5): 154-158.
[30] 芦荻. 基于作战环的反导作战网络能力评估[J]. 现代计算机, 2016, 3(1): 7-10.
LU D. Network capability assessment of anti-missile combat based on operational loops[J].Modern Computer,2016,33(1): 7-10.
猜你喜欢
军事文摘(2022年20期)2023-01-10
法律方法(2022年2期)2022-10-20
环球时报(2022-09-07)2022-09-07
环球时报(2022-05-26)2022-05-26
英语文摘(2021年11期)2021-12-31
小哥白尼(趣味科学)(2020年6期)2020-05-22
英语文摘(2019年6期)2019-09-18
中国外汇(2019年7期)2019-07-13
玩具世界(2019年6期)2019-05-21
学生天地(2018年19期)2018-09-07
