
带LCL滤波三相并网逆变器准比例谐振控制
2018-06-06 01:36
电气开关 2018年6期
(广西大学电气工程学院,广西 南宁 530004)
1 引言
依托全球能源使用增加的背景,可再生能源持续增长,并将逐渐成为深受欢迎的主流能源。作为新能源发电单元与电网之间必不可少的能量转换接口,并网逆变器对分布式发电系统的安全、稳定和高质量运行具有十分重要的作用[1-2]。因此研究高效的并网逆变器控制策略具有重要的现实意义。
为了抑制逆变器的并网电流谐波,必须在其近网侧增加滤波器。在并网逆变系统中,主要采用两种滤波器型单L电感结构和LCL结构两种滤波器。L型滤波器为一阶环节,控制性能较好,系统易于稳定,并且结构简单,使并网系统中经常采用的滤波方式。但单电感滤波器对电流纹波的衰减与频率成正比,对纹波的抑制能力较差,因此滤波电感大。而LCL滤波器成本低、体积小、动态性能好,且具有更好的谐波抑制能力[3]。因此,在开关频率较低的大功率光伏并网发电系统中,通常使用LCL滤波器。然而,LCL滤波器是一个典型的三阶环节,其低阻尼性会使其频率响应在谐振频率处存在谐振尖峰,容易造成并网逆变器振荡甚至不稳定。目前有以下两种抑制谐振尖峰的方法使用较为广泛:一种是无源阻尼法,即在LCL滤波器中加入实际的阻尼电阻,另一种方法是有源阻尼法,由控制算法来等效出一个与实际电阻作用相同的控制策略[4-6]。
由于PI 控制器只能对直流信号实现无静差控制,在三相情况下,它的跟踪性能会有偏差,功率因数较低,很难保持系统的稳定[7]。虽然三相abc坐标系可以经过PARK变换转换为dq两相旋转坐标系,再由PI控制对并网电流进行调节。但是LCL滤波器为三阶滤波,d/q坐标系下会出现电压、电流控制的三个耦合项,这给闭环系统的解耦带来了十分大的困难,增加了控制策略的复杂程度。而准PR控制器则很好地克服了PI控制器存在的问题。α/β坐标系下两个坐标轴电流控制量没有耦合,相互独立,无需进行解耦计算,可以使闭环控制系统控制策略得以简化[8-9]。
本文采用LCL型并网逆变器,引入电容电流反馈,增加系统阻尼抑制谐振尖峰。在α/β标系下采用准PR控制器实现无静差跟踪。最后,在指令电流发生变化时,对d/q坐标系的PI控制和本文提出的控制策略的仿真进行对比分析,验证了控制策略的优越性。
2 三相LCL逆变器建模
2.1 LCL型逆变器结构图与数学模型
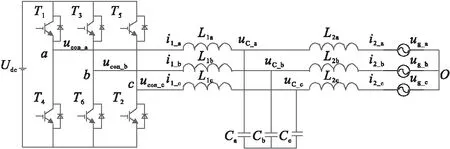
图1 LCL滤波三相并网逆变器拓扑结构
三相静止坐标系下的数学模型
(1)
(2)
(3)
其中,分ucon_a(t)、ucon_b(t)、ucon_c(t)别代表LCL型逆变器侧电压;ucon_a(t)、ucon_b(t)、ucon_c(t)分别代表三相电容两端电压;ug_a(t)、ug_b(t)、ug_c(t)分别代表三相电网电压;i1_a(t)、i1_b(t)、i1_c(t)分别代表逆变器侧三相电感电流;i2_a(t)、i2_b(t)、i2_c(t)分别代表电网侧三相电感电流;P=d/dt为微分算子。
2.2 LCL滤波器幅频特性以及有源阻尼
为更好分析比较L型滤波器和LCL型滤波器滤波效果之间的差异,假设L型滤波器电感值为L,而LCL型滤波器逆变器与网侧的电感值分别为L1和L2,即L=L1+L2;二者传递函数分别为:
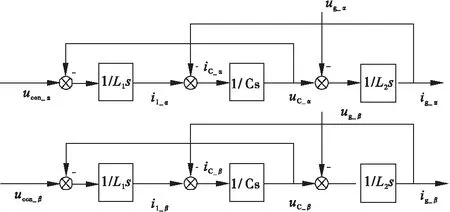
图2 α/β两相静止坐标系下的数学模型

图3 d/q两相旋转坐标系下的数学模型
(4)
(5)
分别绘制波德图:
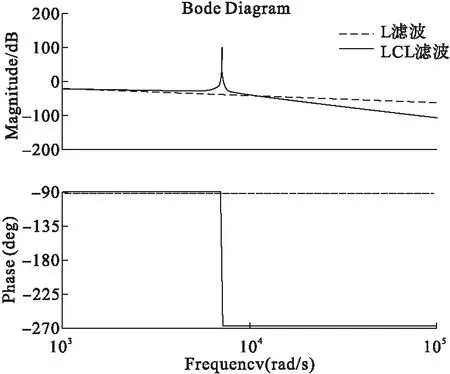
图4 L型和LCL型逆变器波德图
由图4可知,L型和LCL型滤波器的衰减率在低于转折频率的情况下均为,两者的衰减情况是相同的;在高于转折频率的情况下,L型滤波器依然以的速率衰减,而LCL型滤波器的衰减率则增加至-40dB/dec,其对于开关频率及以上高次谐波的衰减效果更好。所以在确保电流高次谐波获得相同衰减效果的情况下,采用 LCL型滤波器时其总的电感电抗值要远低于单电感 L型滤波器,可以更好地滤除开关频率及以上的电流高次谐波分量。但由于谐振峰值的存在,会使并网逆变器输出电流振荡甚至导致系统不稳定,为保证并网逆变器稳定,需要对谐振尖峰进行阻尼。相对于添加阻尼电阻的无源阻尼方法,引入电容过电流反馈的有源阻尼方法更加灵活,也可以避免阻尼电阻损耗。
图5和图6分别为没有引入电容电流反馈和引入电容电流反馈的结构框图。

图5 无电容电流反馈框图

图6 有电容电流反馈框图
忽略电网点扰动时,可有图5、6分别推导出其开环传递函数分别为:
(6)
(7)
为了定性分析二者关系,忽略电流调节器作用。根据上述传递函数绘制零极点图和波特图。由零极点图分析可知,电容电流反馈的引入会使原本在虚轴上的一对极点向左半平面移动,使系统趋于稳定。而由波特图分析可知,引入带反馈系数的电容电流反馈后,系统阻尼加大,使谐振峰值降低,且随着反馈系数的增大,其谐振抑制效果更好,但是比例系数过大,系统的快速性会降低,调节时间会加大,同时系统的相位裕度也会明显减小。
假设引入电容电流反馈后系统阻尼系数为ξ=0.707和谐振频率ω,则有:
(8)
此时,设KPWM=100,则可以计算出电容电流反馈系数:
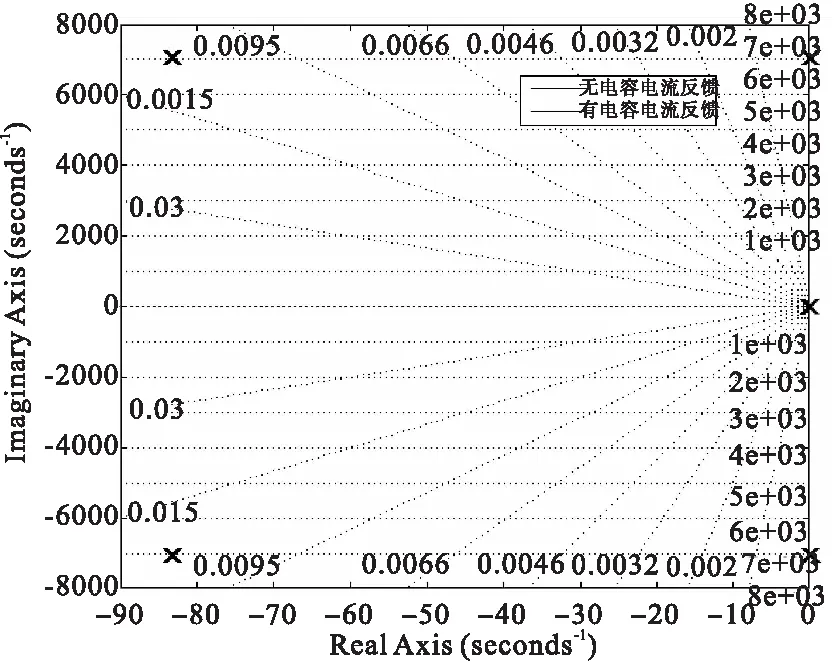
图7 有无电容电流反馈零极点图
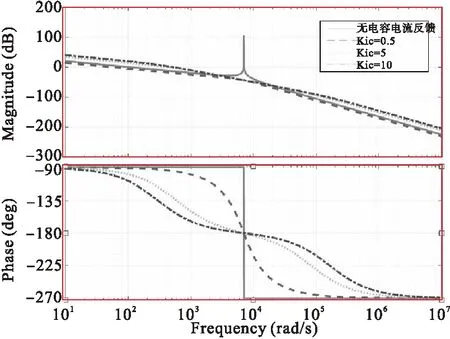
图8 有无电容电流反馈零极点图
3 控制器的选取
3.1 PI控制器与准PR控制器对比分析
并网电流反馈电流调节器PI控制器与准PR控制器传递函数分别为:
(9)
(10)
其中,ω0是基波角频率。
对比两种控制器的波德图可知:QPR控制器在某一谐振频率处有一个非常大的增益,在其他各处频率点的增益都非常小,同时又把带宽增加了,这会使得有高增益的范围变大,电流控制器抗扰动能力升髙。另外,QPR控制器对交流量的跟踪可以做到无静差。
3.2 准PR控制器参数分析
由准PR控制的传递函数可以看出,其有3个参数Kp、Kr、ωc。因此需要分析各参数对控制系统的影响,以此来确定参数的选取。 参数变化时QPR控制器传递函数波特图见图10。
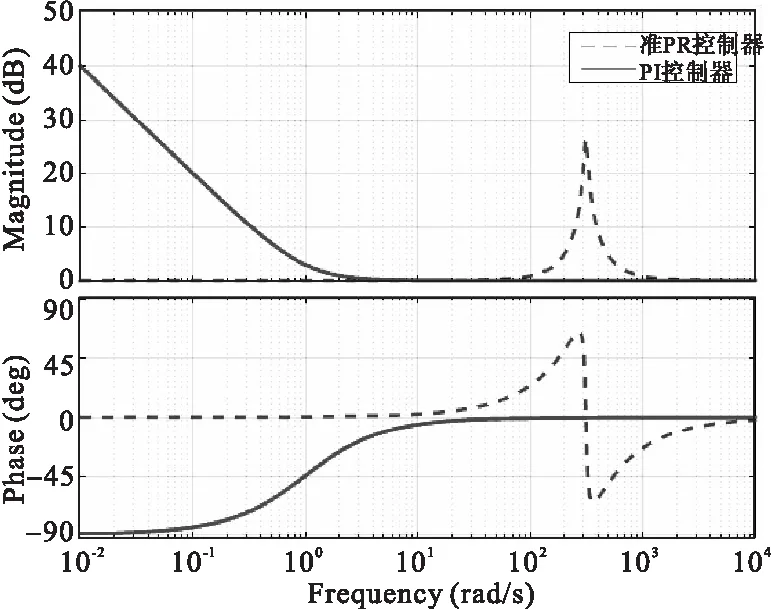
图9 PI、QPR控制器性能对比
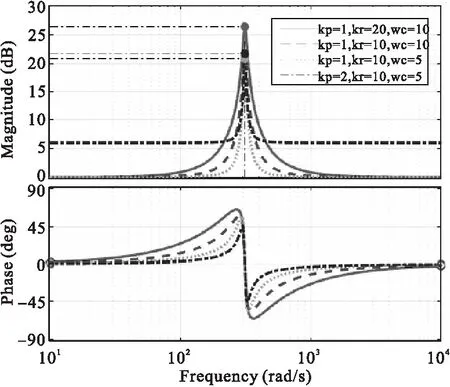
图10 QPR控制器参数分析
由图10可以看出,三个参数相互影响作用很小。参数Kr对于控制器性能影响主要体现在基频部分,而低频和高频部分几乎没有影响。基频处幅值增益随Kr的增大而增大,从而减小系统基频处的稳态误差;在不影响系统动态响应的前提下,Kp越小低频与高频处的幅值增益越小;ωc的增大有利于提高系统带宽,增强系统鲁棒性。
4 仿真结果与分析
为验证控制策略的有效性,本文在在MATLAB/simulink中分别搭建PI控制和准PR控制仿真模型,并对结果进行分析。仿真模型主要参数如1表所示。
由仿真可知,采用 PI 控制时并网电流的正弦度较好,实现了与相电压同频同向,但是有明显的纹波,其并网电流THD值为3.04%。而QPR控制电流纹波较小,并网电流THD值为2.39%。由图可知,采用准PR控制器时,并网电流误差较小,仅为2%。
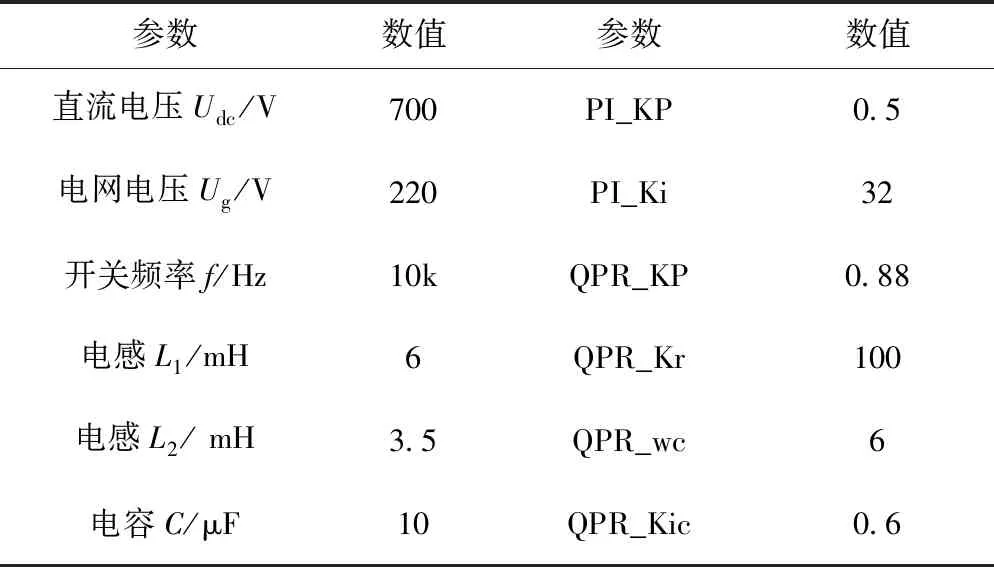
表1 并网逆变器主要参数
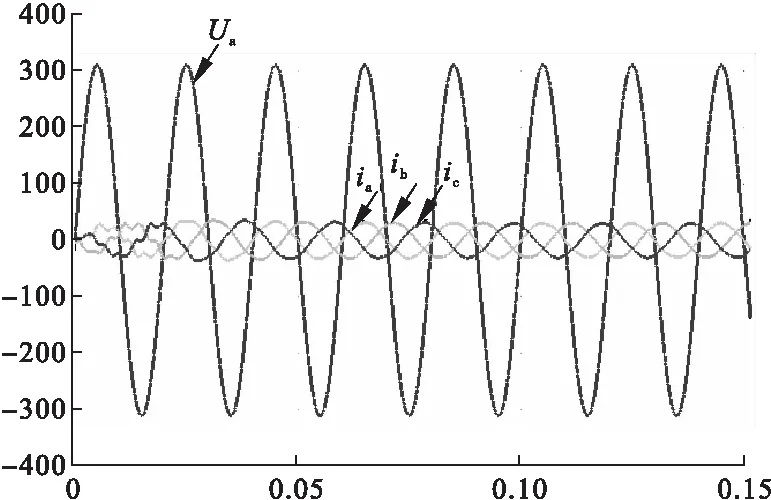
图11 PI控制A相电压与三相并网电流波形
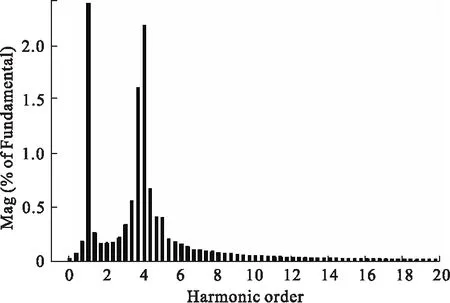
图12 PI控制并网电流THD
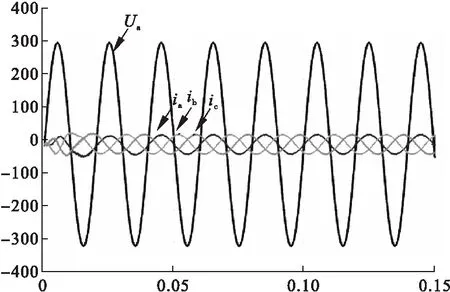
图13 QPR控制A相电压与三相并网电流波形
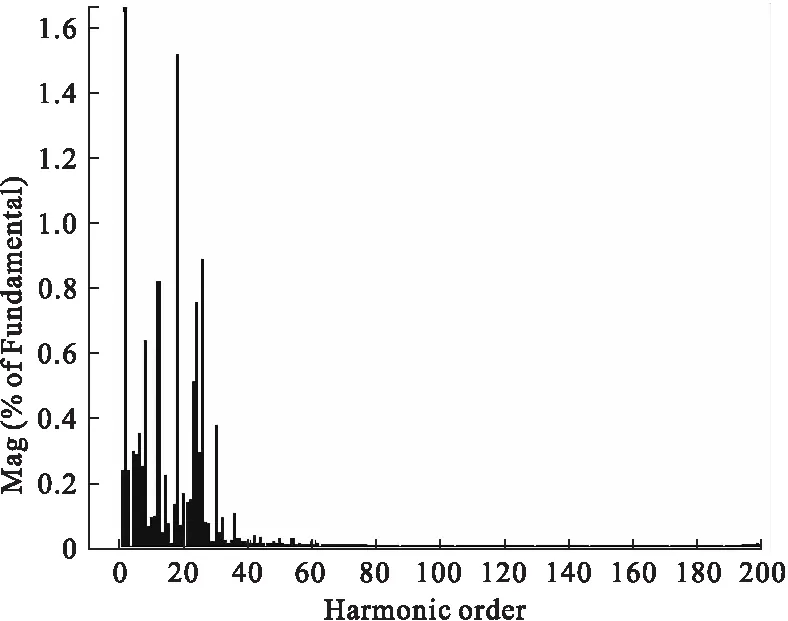
图14 QPR控制并网电流THD
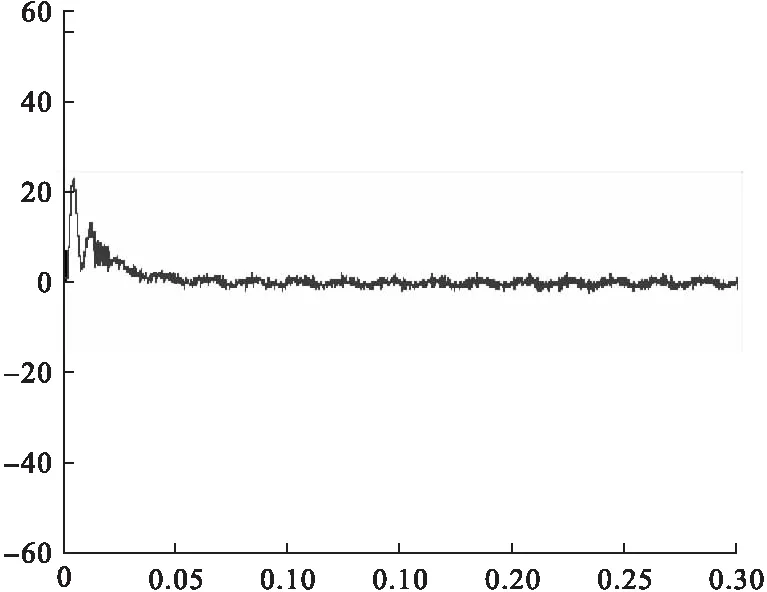
图15 准PR控制并网电流误差
在t=0.2s时,将指令电流有30A突变为15A。得出分别采用两种控制器的并网电流波形。
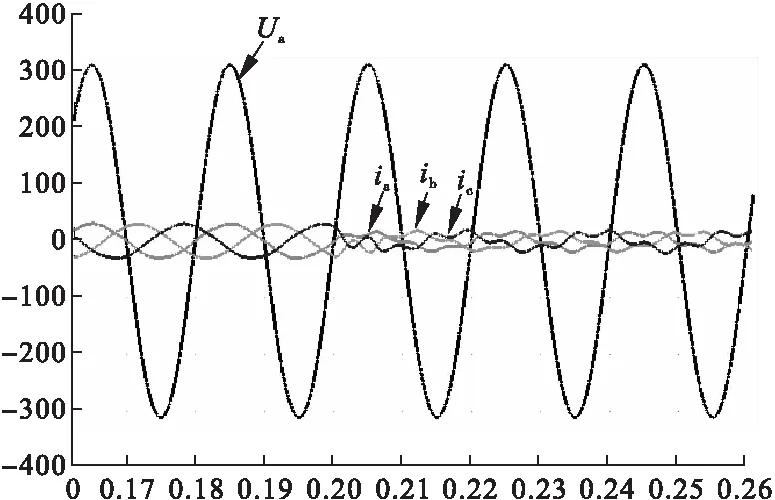
图16 指令电流突变PI控制
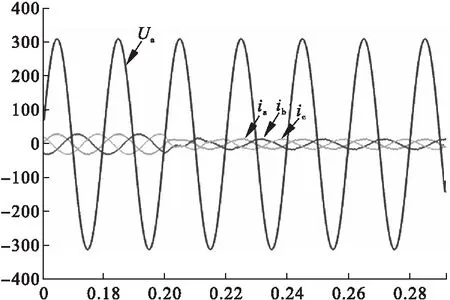
图17 指令电流突变QPR控制
由图16、17可知,指令电流突变时,采用PI控制时,并网电流发生畸变不能很好跟踪指令电流;而采用QPR控制时,不仅动态响应较快,而且并网电流依然可以很好跟踪指令电流。
5 总结
本文对PI 控制和准PR控制进行对比,得出引入电容电流反馈有源阻尼的准PR控制策略能很好的抑制高频谐波,且稳态电流具有更低的谐波畸变率和更好的跟踪效果,稳态电流波形质量明显提高。且在电流指令突变的情况下,准PR控制依然能保持良好的稳定性和跟踪性能。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
通信电源技术(2018年5期)2018-08-23
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年12期)2015-04-09
城市轨道交通研究(2015年3期)2015-02-27
电测与仪表(2014年13期)2014-04-04
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
