
基于纹理分割图的草地分界线提取算法
2018-06-06 03:55邱富军
农机化研究 2018年6期
邱富军
(泸州职业技术学院 电子工程系,四川 泸州 646005)
0 引言
随着科技的进步和农业的迅猛发展,智能控制已不断融入各种生产与服务中。其中,智能割草机器人的发展尤为迅速,已从起初的最低端智能割草机发展到目前可实现环境感知、路径规划和行为控制的高端自动化智能割草作业。为此,国内外学者从各个方面、多个角度进行了深层次的试验与研究,主要从智能割草机器人本身的机构控制水平及不断改进传感器等关键部件的计算精度与速度方面展开。丁毅等学者从割草机器人GPS/DR组合导航系统方面展开相关深入研究[1-2];刘立强等基于Open CV系统的模拟实验方法对除草机器人图像处理技术[3]进行探讨;袁路路基于FPGA神经网络[4]的方法对智能轨迹控制割草机器人设计。本文从智能割草机器人的作业场景入手,从改善智能机器人视觉识别角度出发,通过对图像纹理特征分析,找出能较好适应智能割草机器人进行草地分界线提取的一种算法,为进一步更精准、自动实现路径规划与作业提供支撑。
1 纹理特征理论与方法
纹理[5]是图像存在的分子级特征,难以确切描述和定量化,是智能机器人模拟人类视觉提取元素之一,也是重要的视觉线索。在进行草地图像分割与处理分析过程中,纹理的相关特征及信息的准确识别显得格外重要,通过利用各种单一分析方法或者多种方法相结合对草地图像中存在的纹理特征信息进行有效分类、分割并提取分析,有助于找出更符合实际场景的图像纹理信息。目前,图像纹理分析方法的分类如图1所示。
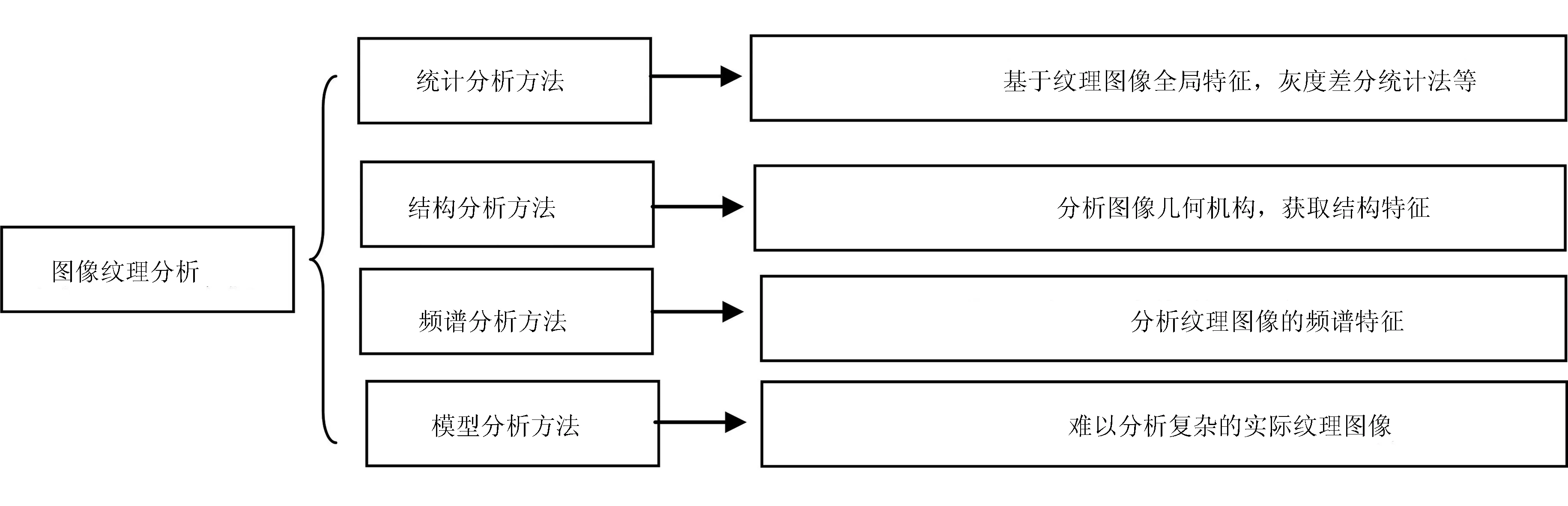
图1 图像纹理分析方法分类
各类图像纹理方法的出发点不同,但是目标都是从多种角度使得分析更加精确化、更加符合草地的整体布局情况,通过智能割草机器人的有效识别,并进行高效率安全工作,达到自动割草作业的目标。
选取何种分析方法进行图像纹理特征处理及提取方法优劣的判别主要取决于以下几个参数:
1)纹理特征维数的划分多少;
2)纹理划分后差别的明显程度;
3)图像纹理分析划分效果如何;
4)下一步算法的适用性及准确度;
5)指导实际应用的可采纳性。
其中,1)、2)两个步骤在进行图像特征提取过程中所起作用最为关键,针对维数较多、纹理划分后差别较不明显的图像,处理难度加大,同时划分效果3)决定后续采取哪一种算法4);各个步骤紧密结合,最终可获取较为优化的应用于实际草地场景5)的提取算法;之后进行符合实际的路径规划,实现智能割草机器人的自动割草作业。
2 提取算法试验过程
2.1 图像分割理论提取算法
图像分割理论提取是第一步,通过智能机器人的摄像头传入机器人图像处理及控制系统,经过一系列处理后依照采集的图像纹理特征相关信息进行准确分割,采用适用性较强的提取算法,继而控制智能机器人有效识别草地分界线,区分未割草区域与已割草区域,实现全区域、全覆盖的割草作业;同时,在此作业过程中融合其他自动控制技术有效规避障碍物,实现全程自动作业。下面针对图像分割理论提取算法做简要介绍。
首先,针对智能割草机器人工作区域的界定,选取高端摄像头,简易摄像头工作区域原理如图2、图3所示。由于摄像头工作范围自身存在缺陷,因此配备超声波传感器与红外传感器进行实时监测。超声波传感器对于50m之外草地范围进行扫描传输回机器人控制,红外线传感器对于10~50m之内草地范围进行扫描传输回机器人,以减少工作过程中出现盲区的范围,实现最大限度的草地割草作业。

图2 智能割草机器人前端摄像头工作区域
图像的颜色模型表征一种视觉效果,RGB模型是红、绿、蓝3种基色调组成的混合体,HSI模型表征色调、饱和度和亮度,其机理如图4所示。
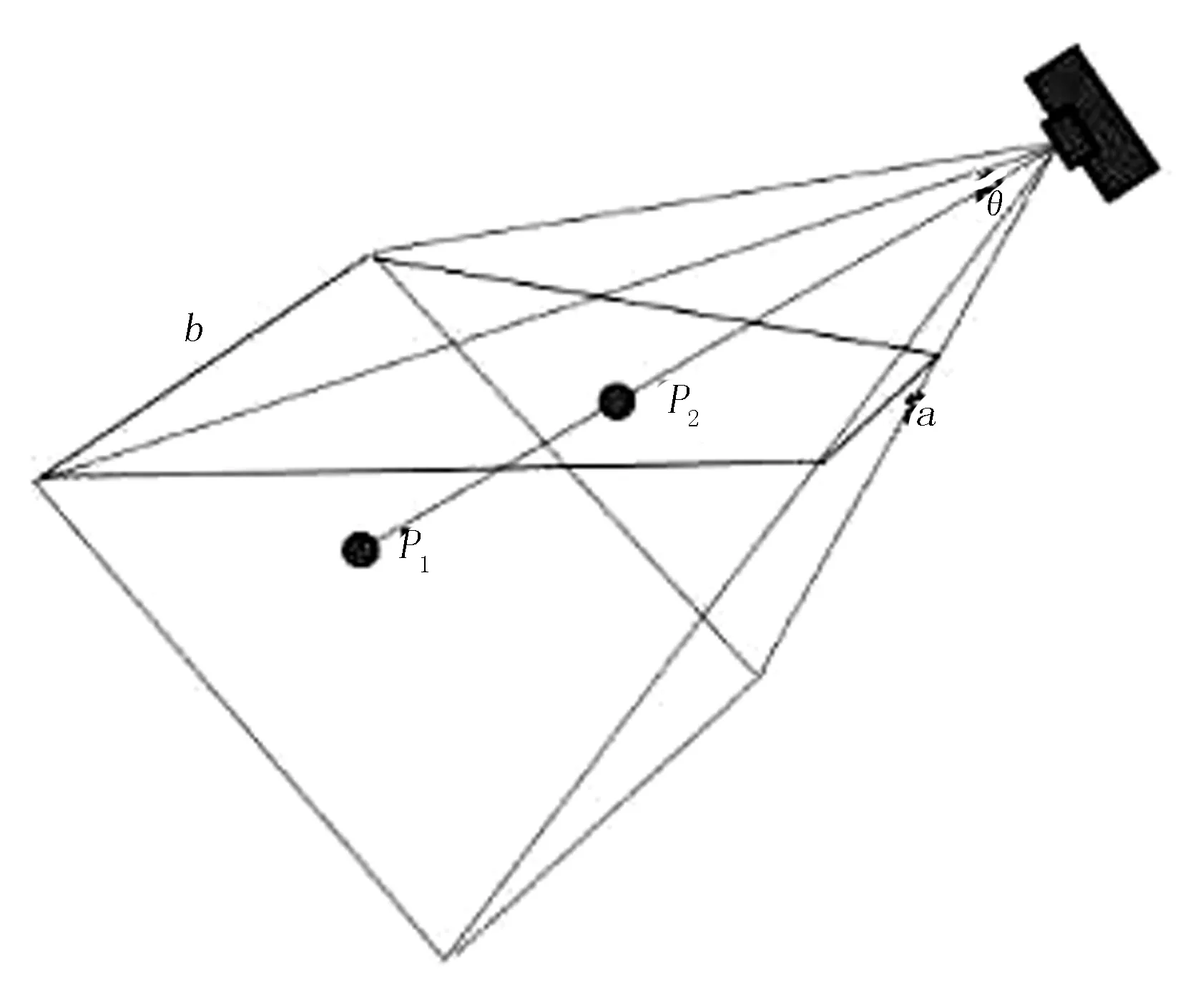
图3 USB前置摄像头成像

图4 平面的HSI颜色模型机理
两种模型之间的转换公式为

根据人眼识别草地机理,作用于机器人摄像头,对HSI模型关键区间进行选取时,选H[80,160]、S[10,100],上下限可轻微调整,但必须符合图像采集原则,如图5所示。
在进行草地图像特征摄取时,智能机器人需要进行预处理,主要步骤如下
1)草地图像灰度化处理;
2)草地图像平滑化处理;
3)草地图像边缘检测;
4)草地图像纹理特征提取。
在进行图像特征灰度化处理时,选取图像特征提取算法SIFT和SUSAN的有效融合[6]:SIFI算法在对极值点进行检测时,选用高斯图像金字塔方式,构成差分尺度空间,可较好适应草地图像复杂特性;SUSAN算法对草地图像边角识别、计算及敏感程度更高、更精确。

图5 实验样本对应的直方图(H值、S值)
SIFT模拟图像的尺度特征,主要是依据空间尺度理论并通过高斯相关函数实现变换,具体公式表述为
L(x,y,δ)=G(x,y,δ)×I(x,y)
其中,(x,y)为坐标点;δ为尺度因子。
为了进一步提高特征提取的稳定性,将DOG算子改进为
D(x,y,δ)=[G(x,y,kδ)-G(x,yδ)]×I(x,y)
=L(x,y,kδ)-L(x,y,δ)
2.2 简要试验过程
建立进行草地图像纹理分割图提取及工作的简图(见图6),包括处理器、摄像头及PC终端设施等试验平台。同时,遵循利用智能割草机器人进行割草作业时草地与背景分界线的提取算法,其试验流程图如图7所示。
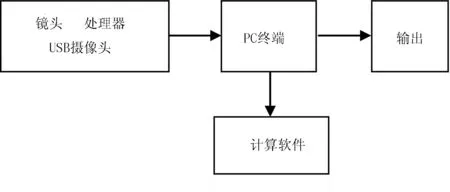
图6 草地图像算法简图
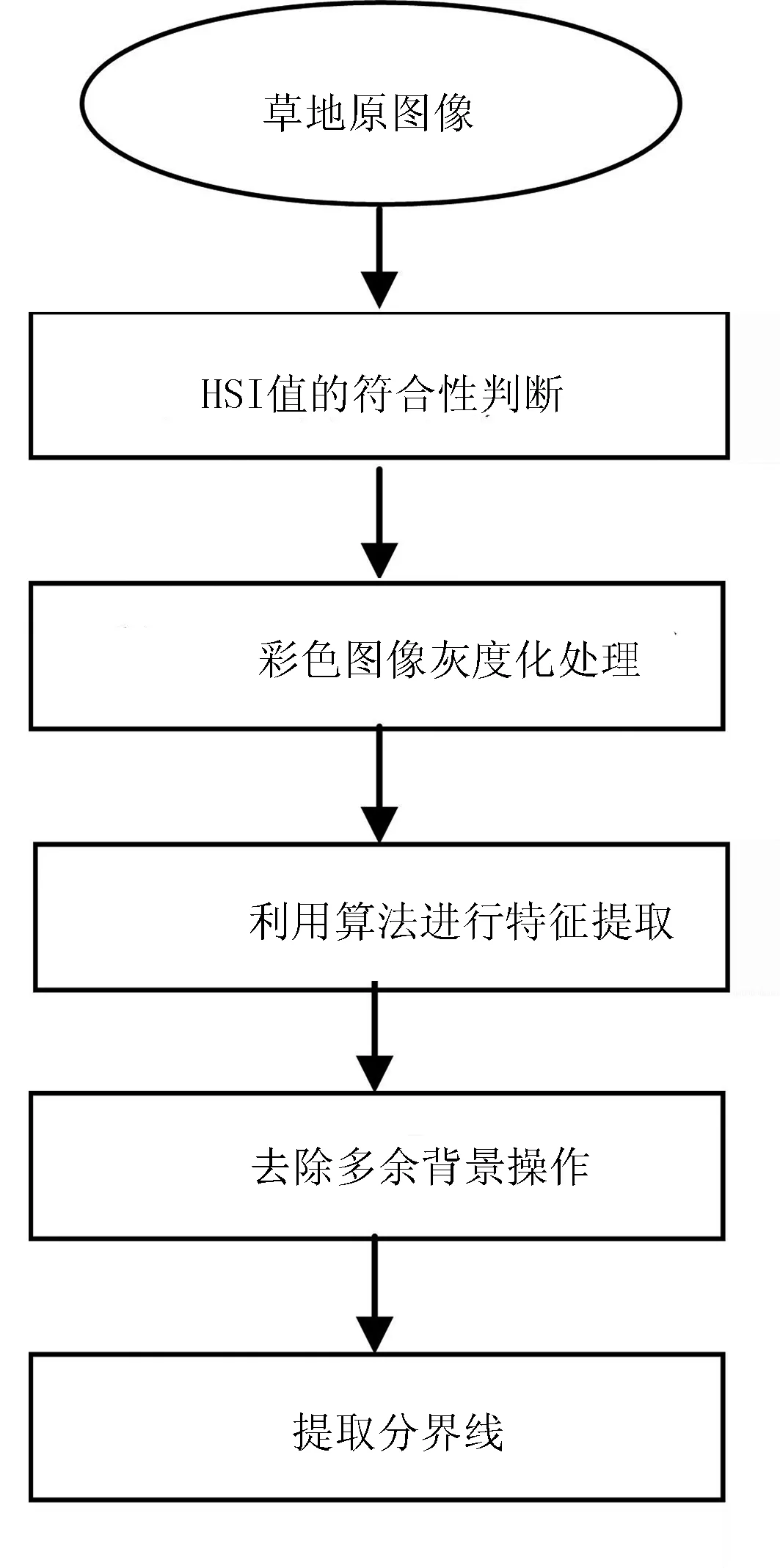
图7 基于提取算法的草地与背景分界线流程图
将草地原彩色图像转换为HIS模型之后,要进一步对图片的灰度值分布进行统计分析,确定偏离角度、偏离距离的最佳值选择;另一方面,主体与客体、目标与背景(即草地区域与非草地区域的分界线)是图像纹理特征变化最为集中的关键部分,目标通过选取相关特征参数来确定最优的图像纹理分割二值图,为最终获取草地分界线而服务。
根据不同的作业场地,筛选出合适的特征值,并统计换分、计算、对比不同大小的历遍窗口分割效果,来显示出所需要的、用于智能机器人辨识的纹理特征;继而通过对不同灰度级的图像纹理分割进行大小形状及其他关键特征信息的统计比较,选出最优的符合实际作业场景的草地边界分割图;之后对所获得的图像进行相关后处理,包括膨胀腐蚀、轮廓杂质剔除等;此时基于图像纹理分割图的提取算法最符合实际,为划分出最优的草地分界线做准备,实现智能割草机器人路径优化与精准度。
进行提取草地分界线,此环节主要将人眼对于事物的成像及边缘化、差异化的判断机理运用于智能割草机器人。边缘检测算法[7]流程主要是通过对原始图像进行滤波处理之后进入平滑处理,并增强梯度或含零点图像,从而检测出边界点。滤波处理[8]环节运用算法及主要代码如下:
e2=entropyfilt (i2);
e2im=mat2gray (e2);
figure; subplot (121)
imshow (e2im);
bw2=im2bw (e2im, graythresh (e2im));
subplot (122); imshow (bw2)
mask2= bwareaopen (bw2, 1000);
figure; imshow (mask 2);
texture1=i ;
texture1 (~mask2)=0;
texture2=i ;
texture2(mask2)=0;
figure; subpot(121)
imshow (texture1);
subplot (122)
imshow (texture2);
boundary=bwperim (mask2);
segmentresults(boundary)=255;
figure; imshow(segmentresults);
边缘检测算法理论模型建立如下,即
卷积得
在生成的最优纹理特征图基础之上,提出一种基于纹理分割图的草地分界线提取,并最大限度实现拟合的算法:智能割草机器人前端摄像头依据图像纹理特征上黑色像素点的密集程度和分布情况对已割草地和未割区域进行初步识别,笔者通过计算机语言Open CV[9]将特征二值图的整体进行等宽度均匀分割。该编程语言编写灵活,计算速度较快,并加入轮廓历遍器统计相关算法,找出包含黑色像素点最多的轮廓历遍器IMAX,如图8所示。
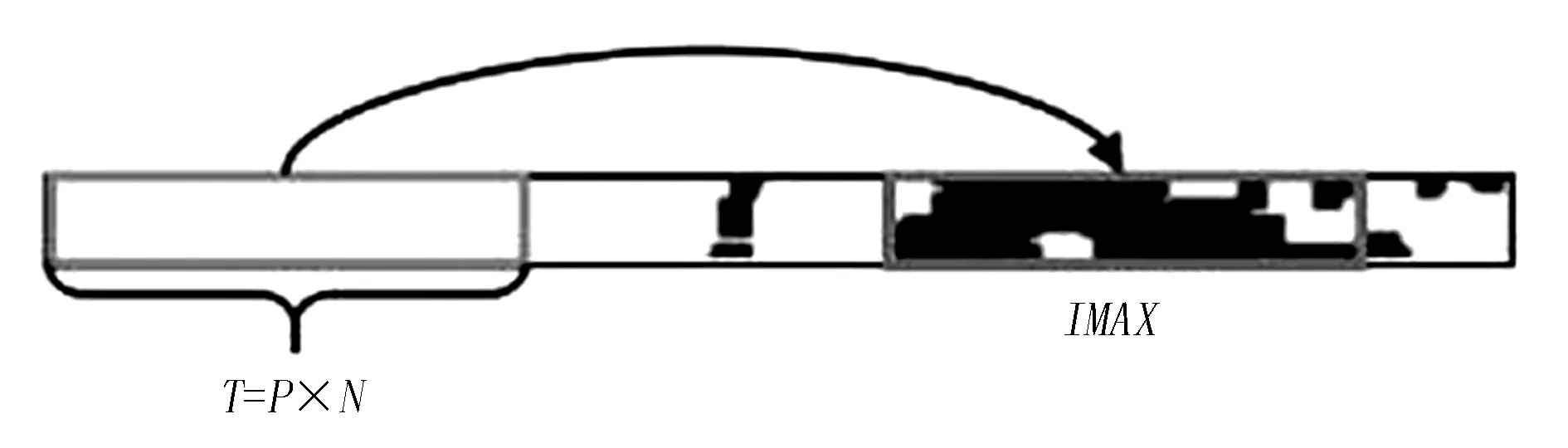
图8 IMAX轮廓分割示意图
相当于一种微分思想,对于分割宽度L的确定必须结合最终的分界线拟合因素综合而定;采取轮廓历遍器长度结合具体纹理复杂程度、黑色像素点集中分散程度呈变动的方法进行轮廓历遍,才可达到最佳分割和拟合效果,最终实现提取草地分界线的目标,如图9所示。
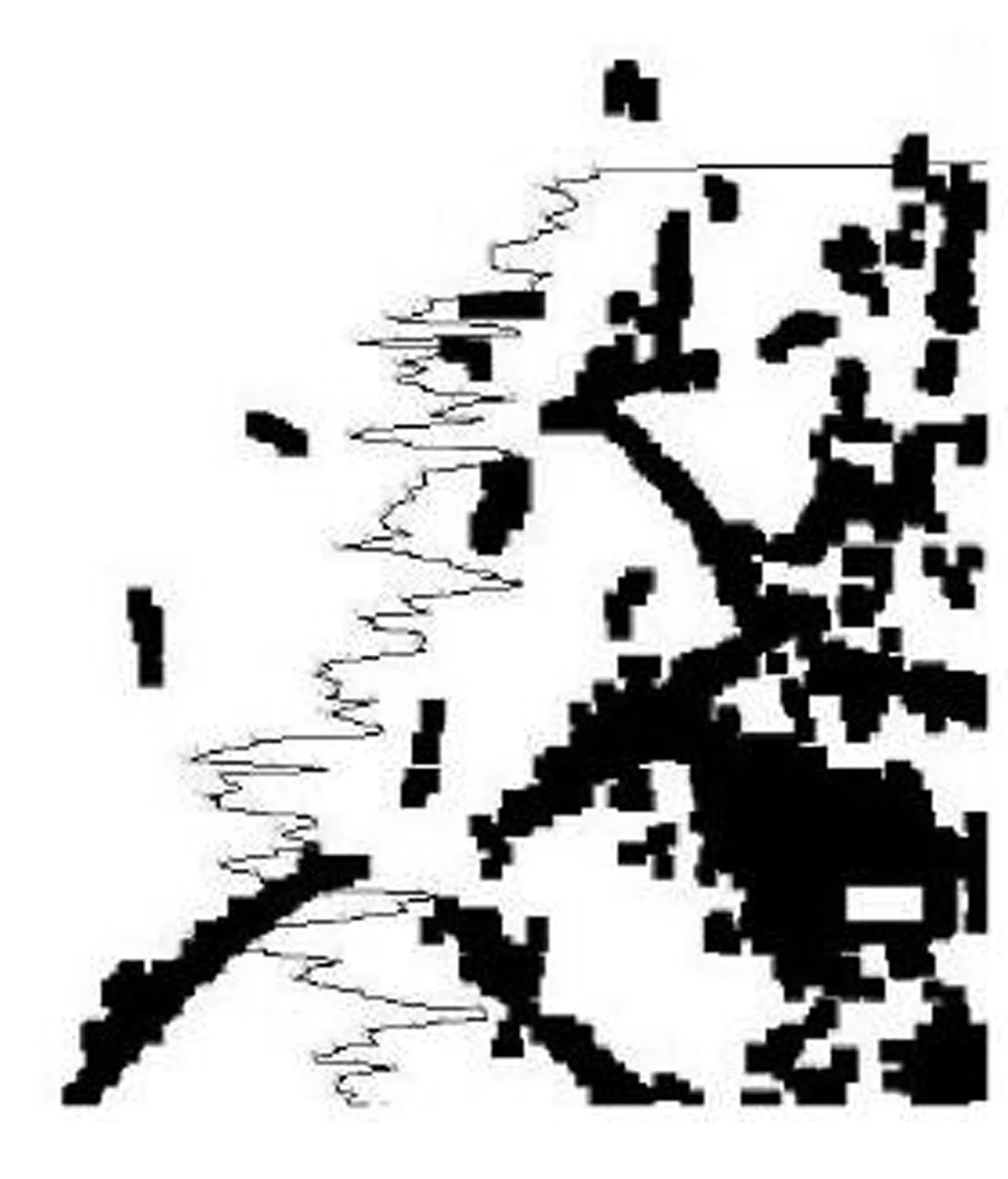
图9 提取的像素点拟合效果
3 分析与评价
通过将所得到的虚拟分界节点连线并与实际试验图像映射[10],得出明显草地纹理特征差别较大的草地分界线。实验原理及相关实际模拟有效,使得智能割草机器人在识别障碍、躲避障碍和自动回归充电功能的同时,将草地分界线功能优化和完善,这对传感器控制及智能机器人的相关硬件设备部件的功能性提出较高要求。此次改进之处在于:模拟人的视觉识别图像机理,对智能割草机器人的摄像头从摄取图像、处理图像、分析图像各个环节进行各步骤最优化提取分割算法,达到最优化采集草地图像信息及融合PC机的集中控制处理功能;提出一种基于图像纹理分割图的草地分界线提取算法,很好地进行分割点坐标拟合,拟合效果如图9所示;通过精确拟合出草地区域与非草地区域两者的分界线,提高了智能机器人识别分界线的水平,并可用于后序完善、优化智能机器人作业路径。
4 结论
从数字图像处理应用及分析转换技术、智能机器人前端摄像头功能优化等方面入手,对草地的图像采集流程进行优化,并进行草地颜色空间和模型的转换,从而提高对智能割草机器人的图像纹理提取分割的实用性。同时,结合各类草地场景的分析算法[11-12],提出一种基于图像纹理分割的草地分界线提取算法,不可避免会有一定的缺陷,但对于提高智能移动割草机器人的图像提取、路径规划[13]及高效作业具有促进作用,可为相关学者对智能机器人的控制进行更深入研究提供一定参考。
参考文献:
[1] 丁毅,邱白晶,周宁,等.割草机器人GPS/DR组合导航系统的研究[J].农机化研究,2006(4):68-71.
[2] 贺涛,肖勇.割草机器人工作原理及试验研究—基于GPS/DR组合导航系统[J]. 农机化研究,2017,39(8):191-194.
[3] 周宁邱,白晶,丁毅,等. 割草机器人避障行为的研究—基于传感器测距及模糊控制技术[J].农机化研究,2006(3):169-174.
[4] 袁路路, 张娓娓. 智能轨迹控制割草机器人设计—基于FPGA神经网络[J].农机化研究,2017,39(4):212-216.
[5] 章毓晋. 图像分割[M].北京:科学出版社, 2001.
[6] 童逸舟.基于图像处理的智能割草机器人路径规划研究[D].杭州:浙江理工大学,2016.
[7] 韩琳,杨明.基于小波变换的纹理特征提取分析[J].电脑知识与技术,2007(11):1395-1422.
[8] 刑明.基于数字图像处理的草坪场景分析算法研究[D].杭州:浙江理工大学,2016.
[9] 刘立强,蔡晓华,吴泽全. 基于Open CV的除草机器人图像处理技术[J]. 农机化研究,2013,35(12):162-165.
[10] 郑鑫.具有路径规划功能的智能割草机研制[D].南京:东南大学,2014.
[11] 陈天华. 数字图像处理[M].北京:清华大学出社,2007.
[12] 李谦, 蔡晓华. 机器视觉在除草机器人中的应用[J].农机化研究,2014,36(7):204-206,231.
[13] 毛可骏,周平.基于机器视觉的自主插秧机导航信息的提取研究[J].农机化研究,2009,31(5):63-66.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
意林(2020年7期)2020-04-27
软件(2020年3期)2020-04-20
摄影之友(影像视觉)(2018年12期)2019-01-28
学生导报·高中版(2017年23期)2017-09-10
学生导报·中职周刊(2017年23期)2017-09-10
Coco薇(2017年8期)2017-08-03
Coco薇(2015年5期)2016-03-29
汽车维修与保养(2015年8期)2015-04-17
