
油菜全程机械化的应用与关键技术研究
2018-06-06 03:55徐海
农机化研究 2018年6期
徐 海
(河南职业技术学院,郑州 450046)
0 引言
我国是世界第一油菜生产大国,无论油菜种植面积还是产量都稳居世界首位。随着科技的不断发展,油菜种植在多方面已实现机械化生产,如土地耕耘、种植、培育、施肥等环节都可通过机械化提高油菜种植水平及效率。目前,由于油菜品种不同导致成熟期不一致,农机化技术难以适应,且油菜收获机械化程度较低,导致油菜整体生产出现瓶颈。统计表明,当前我国油菜机械化程度不足50%。为提高我国油菜生产效率,可在现有技术基础上继续开发,改善油菜生产瓶颈,从关键技术入手,以点带面,全面促进油菜生产技术和效率的提升,降低油菜生产成本。
1 我国油菜机械化发展难点及制约因素
我国油菜育种目标为提高单珠产量及油菜种植品质。油菜种植过程中,需要保证油菜营养充足、植株高大。油菜生长枝繁呈柱状,此种作业模式适合小面积油菜种植栽培,人均劳动力与单位面积配比平衡,难以实现大面积统一管理。机械化作业要求油菜具有一定抗倒性,对播种实际要求较为宽松,且具有一定抗裂角性。当前,油菜育种在以上方面均未做过多考虑,因此成为机械化应用阻碍因素,即农机和农艺不配套。
油菜生产机具独立化明显,各机具难以联合发挥作用。一些机具虽然能够及众多功能于一身,但操作繁杂且需要大量人力,得不偿失。
当前,我国油菜移栽机具种类繁多,根据油菜苗是否带有黏土可将其分为钵苗移栽机和裸苗移栽机两大类。油菜移栽机仍无法适应我国油菜生产工艺要求,难以实现大面积全程机械化。油菜直播方式主要有穴播、条播。油菜直播技术源自水稻及小麦播种技术,而因其种子大小存在明显差异,播种时难以控制油菜种子下料量。
现有技术在收获中仍旧存在损失严重的状况,难以有效控制。目前,油菜联合收割机主要通过传统全喂入式水稻收割机改装而来,重点改装部件为拨禾轮、割台及分禾器,在收获损失率控制上存在先天性不足,很多时候使用该机具仅仅是为了缩短生产周期、降低人工成本,就种植作业本身而言意义不大。
2 油菜全程机械化关键技术研究
油菜全程机械化关键环节在于播种及收获,基于传统作业模式已经难以适应现代化农业生产发展要求,必须加速油菜全程机械化的应用。
2.1 少耕精量复式油菜直播技术
油菜直播关键技术环节在于精量及复式。其中,精量主要指在播种过程中对粒子数掌控恰到好处;复式指完成直播过程一系列辅助作业。因此,研制出具有耕地、播种、挖沟及覆土等复式直播机,具有较大实用价值。少耕精量直播机主要采用异形孔窝眼轮式油菜排种器(见图1),根据油菜种子设置相关参数。例如,根据种子直径设置排种器孔径,根据实际播种需求设置孔数。
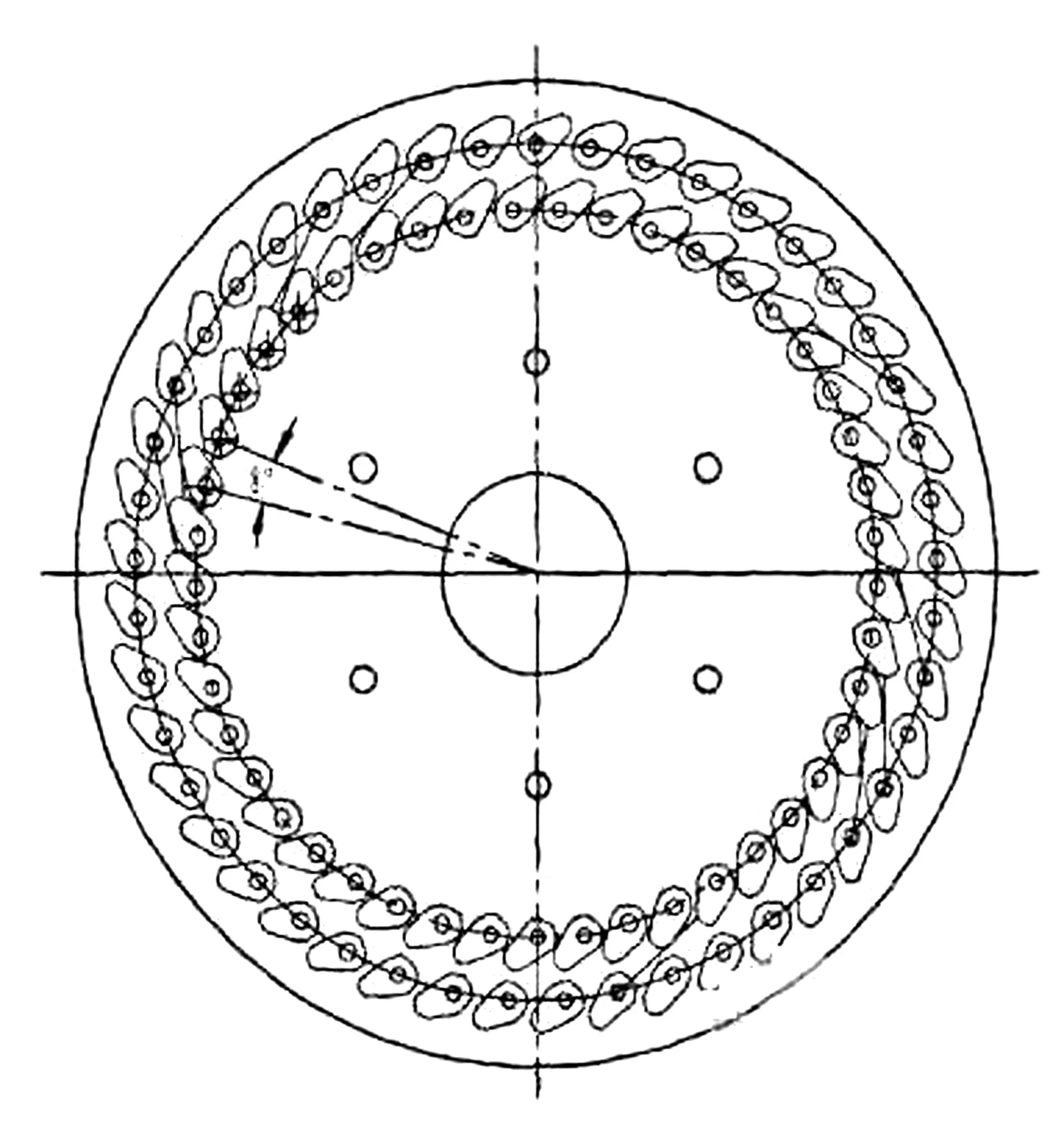
图1 异形孔窝眼轮式油菜排种器
为确保油菜种子顺利滑落至型孔,需计算种子在型孔下落平面夹角α,几种常见状况如图2所示。
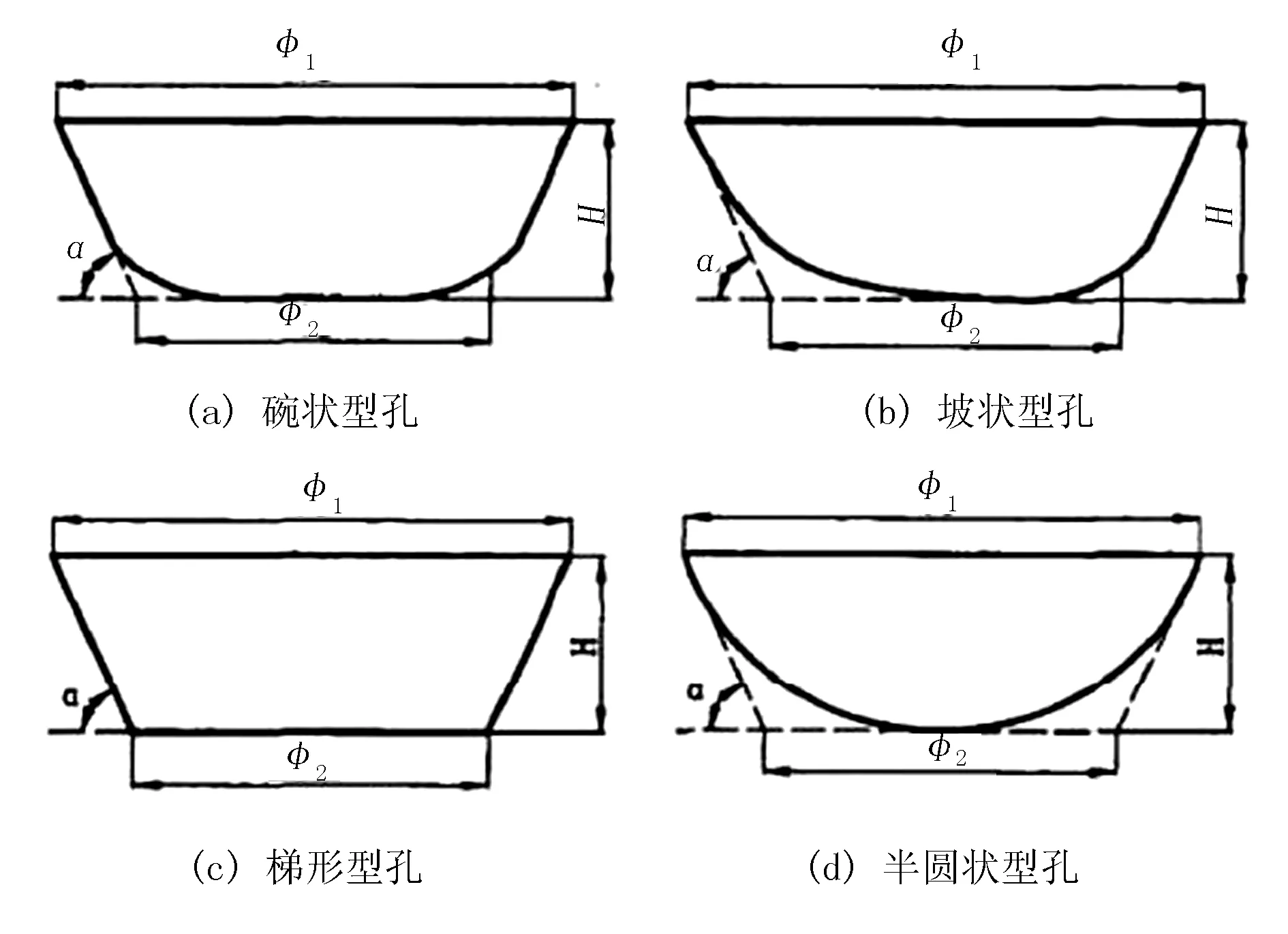
图2 型孔正视图
由图2可列出方程:FN=mgcosα,f=FNtanψ(FN为重力分量;f为摩擦力),cosα=-dx/ds。
当y=H时,x=-sqrt(H/a)dw=fds,摩擦力做功为

由能量守恒定律可知


2.2 复式油菜分段收获技术
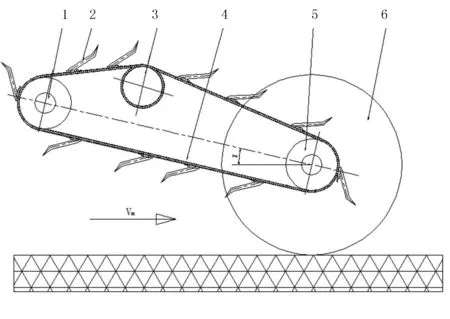
油菜收获主要包括油菜收割、脱粒、晒干及清选几个阶段,针对此流程设计分段收割方案 ,即将流程分为割晒和脱粒清选两个阶段。分段收割虽然不如联合作业连贯,但在每一单独工序上效率高于联合作业;分段作业柔性高,能够和其他作业方式有效结合起来,实用性强。分段收割方式关键在于解决油菜植株强制输送问题。为解决此问题,可采用卧式割台机(见图3),将油菜茎秆使用拨禾轮切割成段并输送至传动带上再强行运送至出口。

1.拔禾轮 2.割刀摆环 3.喂入搅龙 4.割台动力输入轴
拔禾轮结构示意图如图4所示。
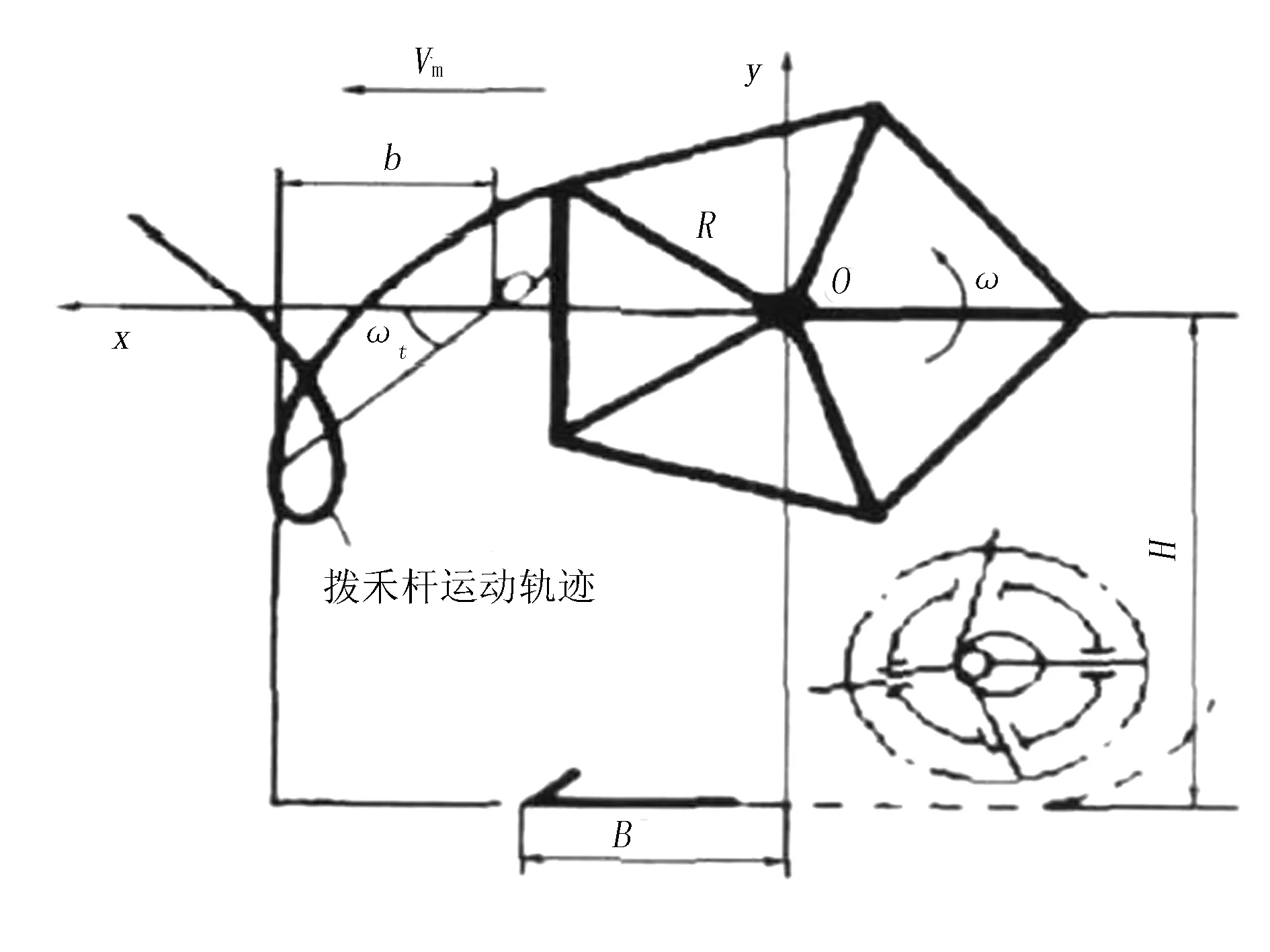
图4 拔禾轮结构示意图
拔禾轮作业条件为轮速比λ>1,此时其转速为n=30vmλ/R,线速度应小于1.5m/s,即πRn≤1.5m/s。转速同平均当量作用次数关系为n=60vmM/Zs。其中,m为平均当量作用次数;s为单株角果层直径。取转速为11~23r/min。
脱粒时,需要提高捡拾台的通用性和互换性。在设计时,结合当前市场通用收获机,在捡拾台安装弹齿结构,使得油菜能够被顺利输送进入脱粒装置,降低夹粒和漏粒可能性。
2.3 油菜联合收获技术
联合收获技术主要指将油菜收割过程所有作业一次性完成,提高作业连贯性。油菜联合收获技术关键技术是割台技术,因此参考当前相关技术设计割台结构,适当安排拔禾轮相对割刀位置,如图5所示。
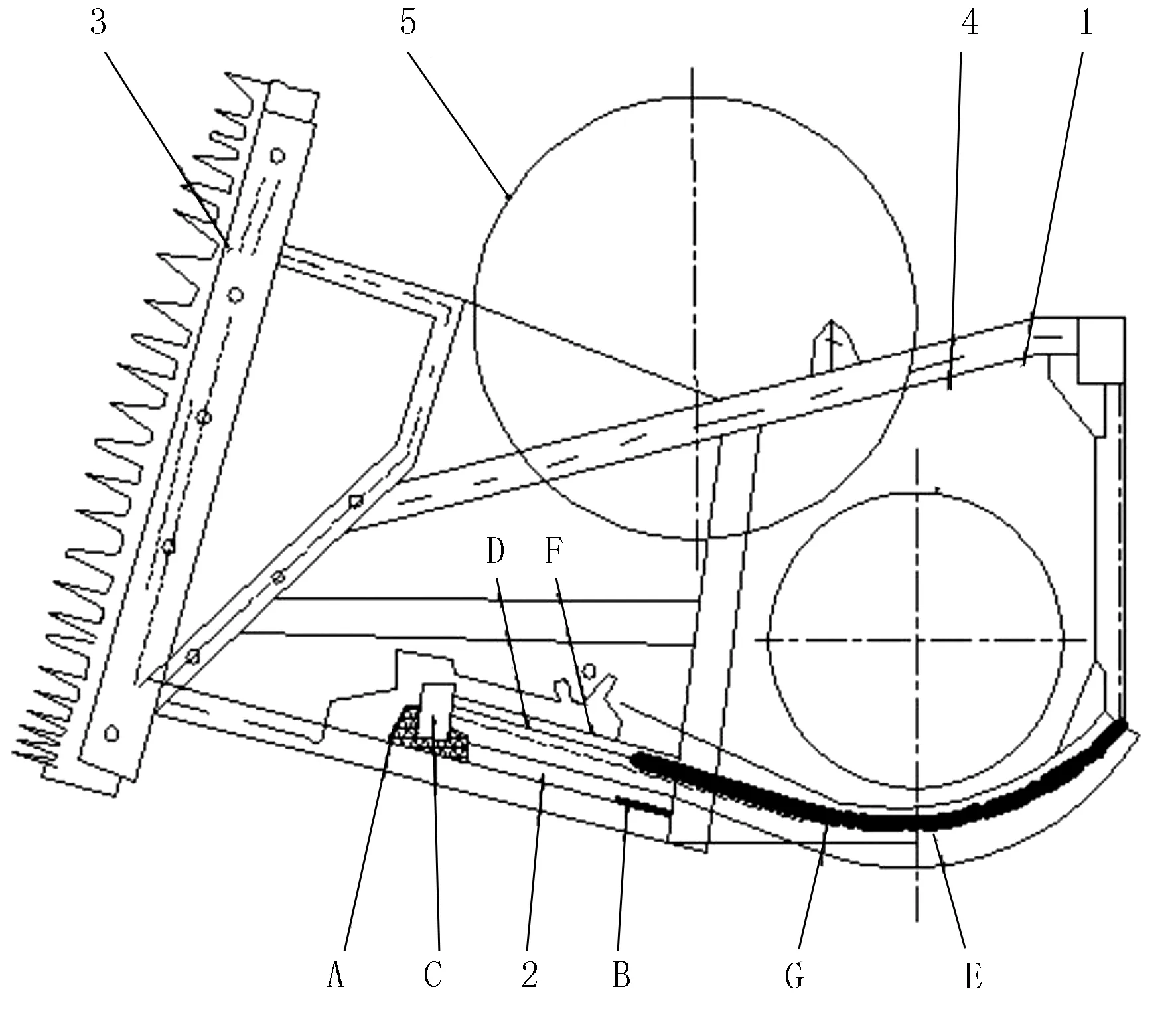
1.割台机架 2.主切割装置 3.竖切割分禾装置 4.喂入搅龙 5.拔禾轮A.前伸固定座 B.后缩固定座 C.刀梁 D.刀梁加强筋 E.底板加强筋 F.刀梁盖板 G.底板图5 联合收割机割台设计图
油菜脱粒技术选用轴流脱粒分离,结合清选装置设置相应参数,降低脱粒不净状况,提高粒子洁净度。油菜联合收割机还设置了齿轮检视器,如图6所示。
1.后辊轴 2.弹齿 3.中间托辊 4.皮带 5.前辊轴 6.仿行轮
结合齿带式捡拾器进行拨指的运动轨迹及运动方程确定,对拾捡器进行受力分析,如图7所示。
图7直角坐标系中,弹齿根部围绕圆弧dp运行,运行速度为vm,设初始点为B1,P点初始点为P1。由图7可知:ε=ψ-90-β,cos(-ε)= cosε=sin(ψ-β),则B点轨迹方程为
X=Vmt+OBsin(ψ-β)
Y=OBcos(ψ-β)
其中,ψ=wt;β为齿轮安装角;t为齿轮转动时间。
对以上两式求导可得
Vx=λVm+OBcos(ψ-β)
Vy=-λ=Vmsin(ψ-β)
在p点有Vx=Vm-Vtpcosγ(Vtp为p点速度;γ为倾斜角),可得出
Vx=Vm-Opwcosγ
Vy=-Opwsinγ
求解速度比λ,由以上可列出等式为
Vm-OBcos(ψ-β)=0
Vm-Opwcosγ=0
由ψ×18-γ得:Vm-OBwcos(λ+β)=0,Op/OB=e。
联立以上方程得:tgγ=ctgβ-e/sinβ,λ=1/cosγ(0≤γ≤45°)。
确定拾器结构相关参数后,还需进行被捡拾物受力分析,如图8所示。
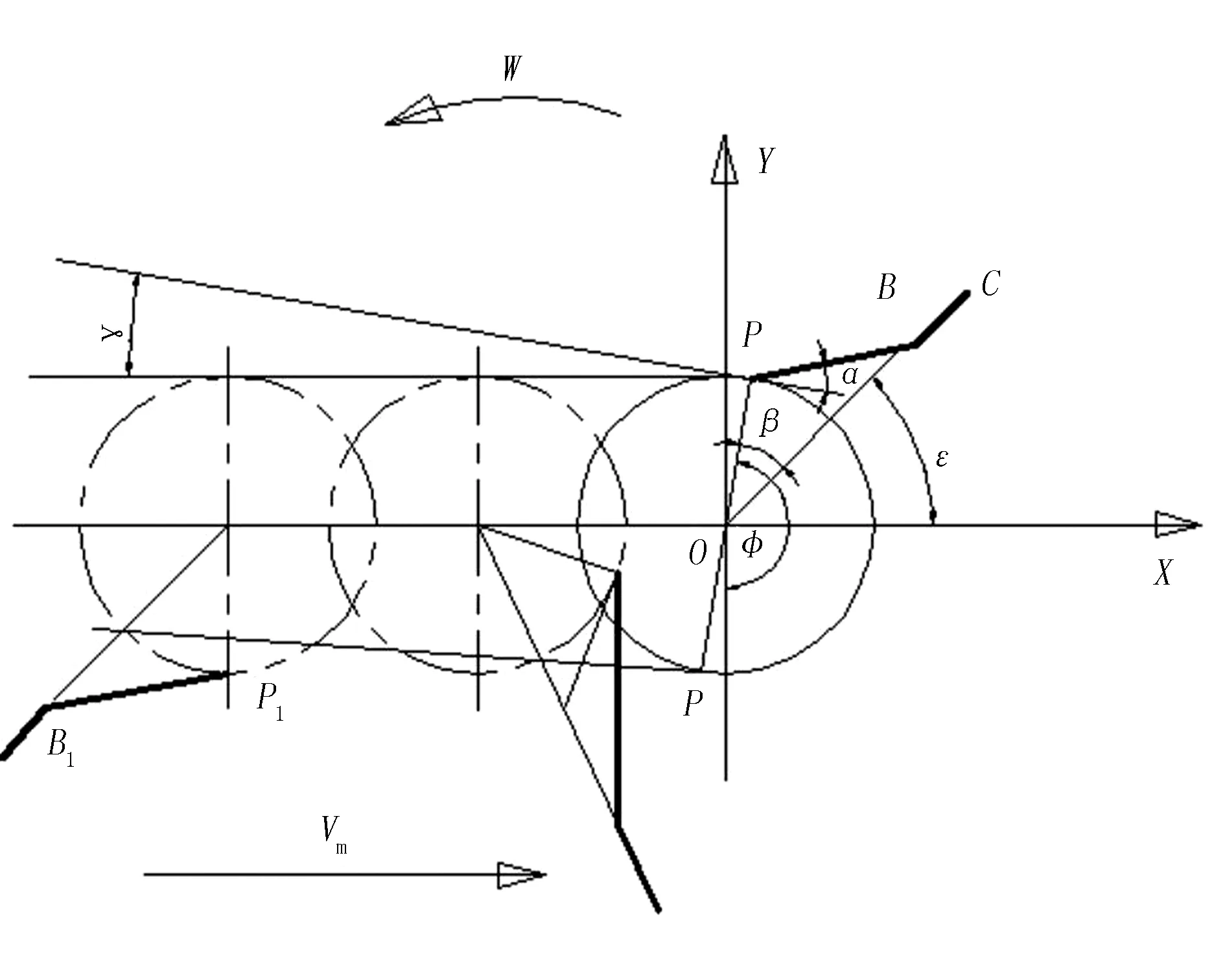
图7 捡拾器运动分析筒图
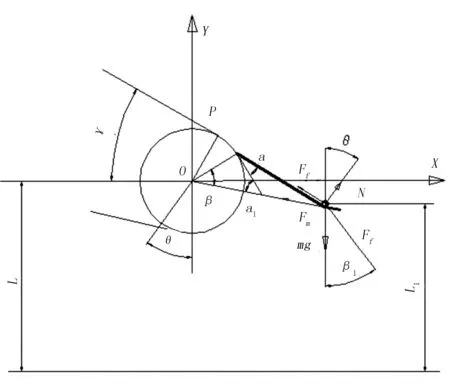
图8 被捡拾物受力分析简图
图8中:茎秆与齿带摩擦力为Ff;茎秆之间牵扯力为Pt;Fm为质点加速度产生的力。根据矢量合成有
aa=ae+ar+ac
其中,aa为牵连加速度;ac为科氏加速度;ar为相对加速度。速度不变时,ae=0,ac=0,aa=ar=Vd2/OB=OBW2。被捡拾物不落下时有
Ftsinβ1-Fmcosα1-Ffcosθ=0
mg-Ffsinθ-Fmsinα1+Ftcosβ1
α1=90-β,Fm=maa=mOBW2
Ff=f(mgcosα1-Fmsinα1)
整理以上方程可得
Ftsinβ1-mOBW2(sinβ-fcosθcosβ-fmgcos2θ=0
Ftcosβ1+mOBW2cosβ(fsinθ-1)+mg(1-f)=0
cosθ=L-L1/sqrt[OB2+(L-L1)2]
由此可知:当w确定时,捡拾其阻力方向角随OB以及L-L1发生变化,因此需要通过OB及L-L1确定捡拾具体位置。
3 油菜全程机械化应用案例
3.1 案例背景
我国2011-2012年样本省种植面积和种植方式统计如表1所示。由表1可看出:我国大多数地区仍旧采用传统作业模式进行油菜生产。随着农村大面积承包种植的不断推广,传统油菜作业模式已经无法满足实际需求。因此,湖北黄冈市开始推行油菜全程机械化应用,计划5年引进专业机械化设备(设备类型和参数与本文一直),并邀请专业技术人员给予技术指导,归纳总结相关经验,反馈给相关研究组,对相关机械设备不断更新改进及对油菜全程机械化不断优化,目前已推行3年,效果明显。3年示范项目统计如表2所示。
表1 我国2011-2012年样本省种植面积和种植方式统计
Table 1 Statistics of planting area and planting pattern of 2011-2012 sample in China 万/hm2
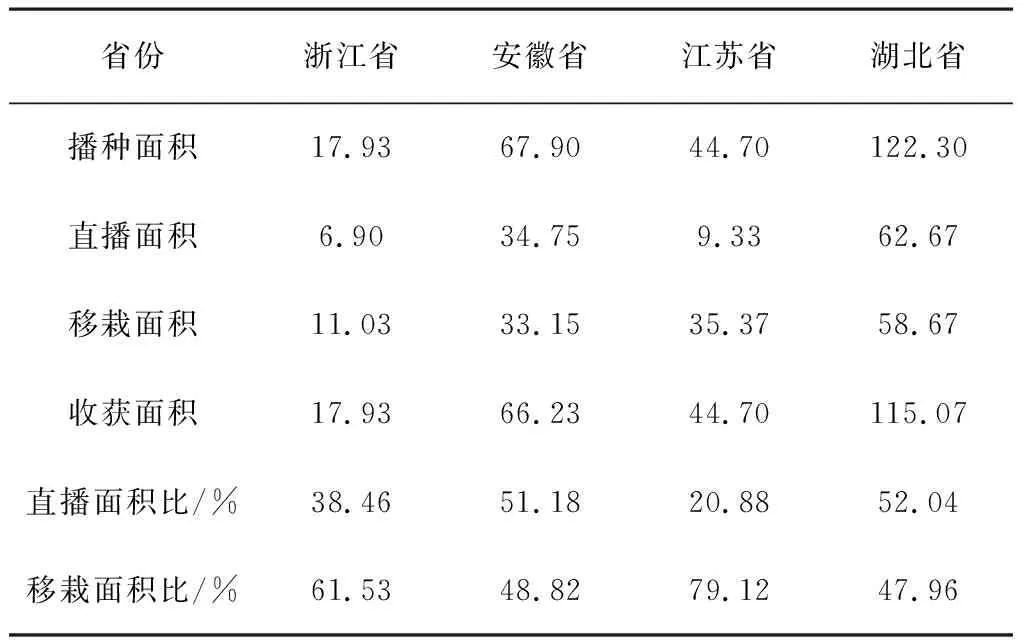
省份浙江省安徽省江苏省湖北省播种面积17.9367.9044.70122.30直播面积6.9034.759.3362.67移栽面积11.0333.1535.3758.67收获面积17.9366.2344.70115.07直播面积比/%38.4651.1820.8852.04移栽面积比/%61.5348.8279.1247.96
表2 油菜生产全程机械化示范项目测产统计表
Table 2 Statistical table of production demonstration project of rape production mechanization
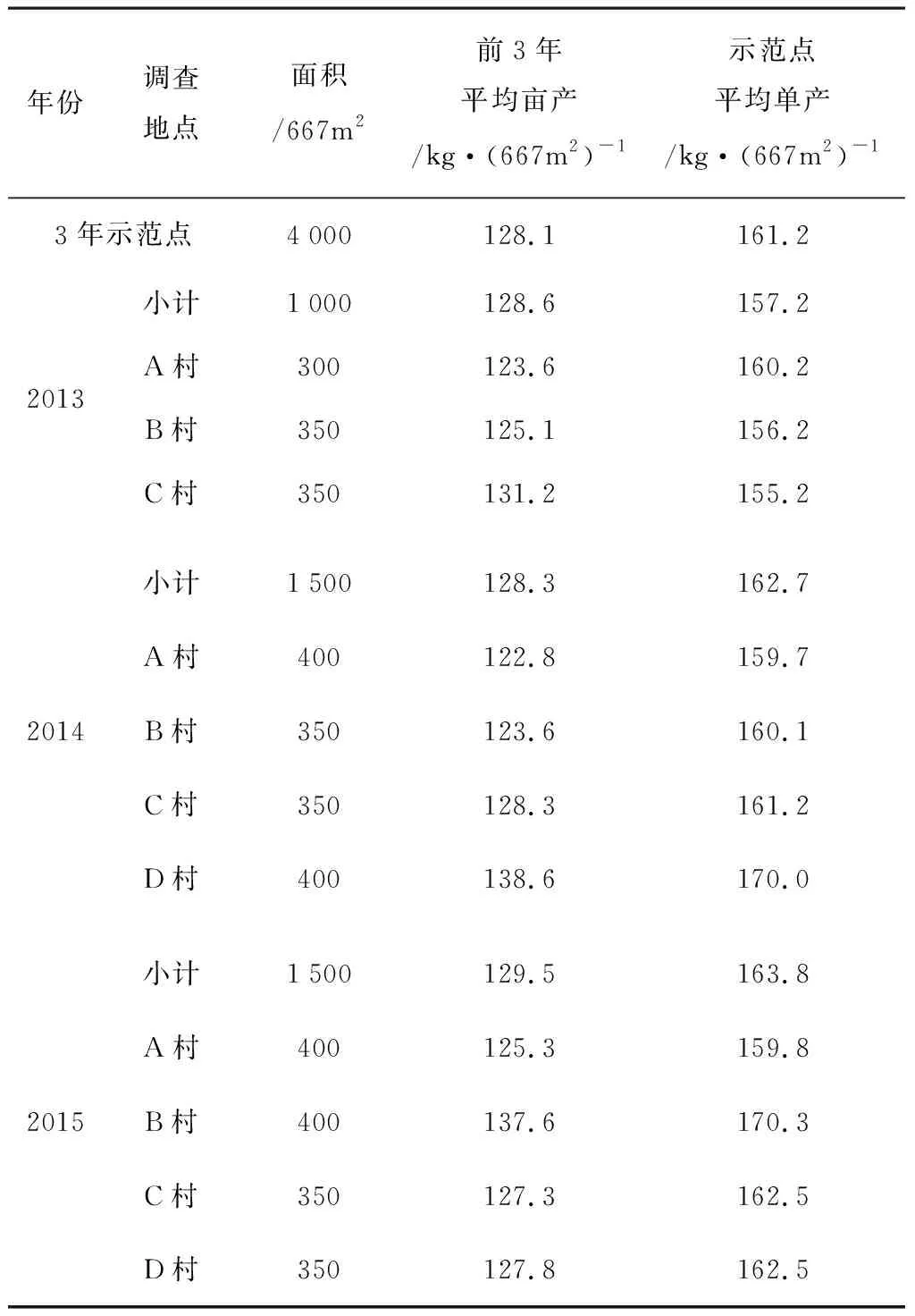
年份调查地点面积/667m2前3年平均亩产/kg·(667m2)-1示范点平均单产/kg·(667m2)-13年示范点4000128.1161.22013小计1000128.6157.2A村300123.6160.2B村350125.1156.2C村350131.2155.22014小计1500128.3162.7A村400122.8159.7B村350123.6160.1C村350128.3161.2D村400138.6170.02015小计1500129.5163.8A村400125.3159.8B村400137.6170.3C村350127.3162.5D村350127.8162.5
3.2 案例实施
进行全程机械化和传统作业模式的对比,3年来按照表2作业模式展开对照,分析经济效益。
3.3 经济效益
各种播种方式成本核算如表3所示。由表3可以看出:机器播种每667hm2比传统播种节约78元,比传统移栽节约145元/667hm2。实践表明:联合收割成品洁净度较高,籽粒饱满,漏籽率低,平均每千克可增加0.2元收益,每公顷增收450元。实施项目后,每公顷节约成本2 625元,总种植面积按200 hm2计算,可节支52.5万元。
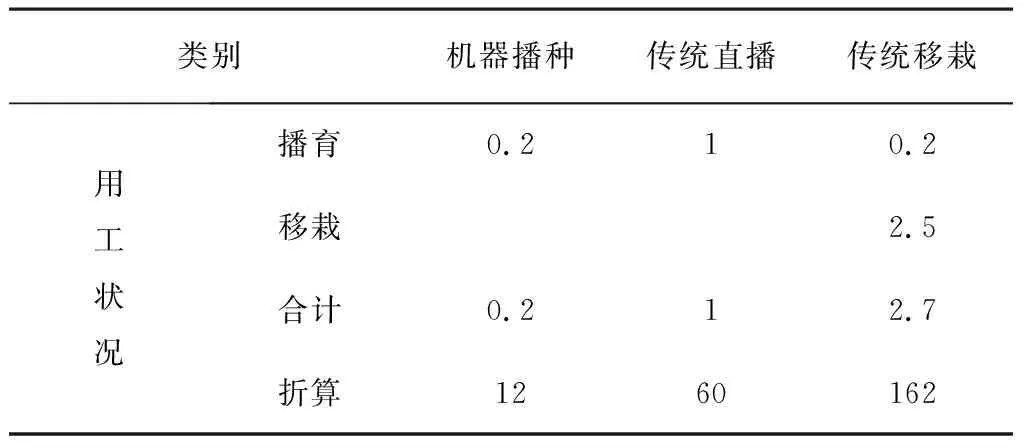
表3 各种播种方式成本核算
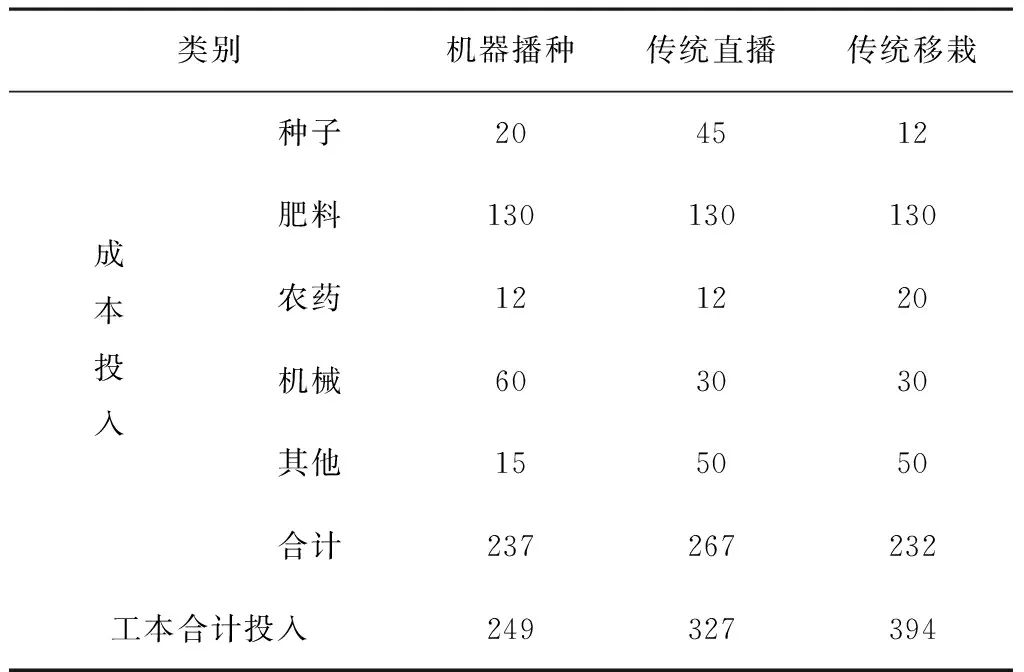
续表3
4 结论
油菜全程机械化是油菜生产未来发展趋势,基于品种、栽培技术、地域、气候及作业模式等因素影响,油菜全程机械化在种植过程中必须选用合适品种,并根据实际情况选用合适的机具,提高油菜种植适应性,让油菜种植过程、机具选择、油菜种植工艺相互协调,以促进油菜全程机械化进程。
参考文献:
[1] 屠继军.油菜机收的农艺要求与栽培措施探[J].园艺与种植,2014(11):23-25.
[2] 汤修映,侯书林.油菜移栽机械化技术研究进展[J].农机化研究,2010,32(4):224-226.
[3] 李建国,许虎泉,何增富.油菜机械化直播高产栽培技术关键[J].农业装备技术,2012,33(6):16-17.
[4] 孙进,李耀明,徐立章.油菜联合收割机清选装置研究动态和技术分析[J].农机化研究,2011,33(6):62-64.
[5] 傅廷栋.油菜生产品种改良与机械化农业装备技术[J].农业装备技术,2010,36(2):22-25.
[6] 张尧锋.油菜全程机械化生产配套技术研究与示范[D].杭州:浙江大学,2012:34-67.
猜你喜欢
农业工程学报(2022年12期)2022-09-09
今日农业(2021年21期)2021-11-26
今日农业(2021年14期)2021-10-14
今日农业(2021年7期)2021-07-28
小雪花·小学生快乐作文(2021年1期)2021-05-17
建材发展导向(2021年23期)2021-03-08
农业技术与装备(2020年11期)2020-12-17
湖南农业大学学报(自然科学版)(2020年4期)2020-08-27
农业机械学报(2018年9期)2018-09-17
中国交通信息化(2017年11期)2017-06-06
