基于单目测量方法的架空导线弧垂实验研究
2018-06-05 00:43:46张星,王孟,王政,薛博
电力科学与工程 2018年5期
张 星, 王 孟, 王 政, 薛 博
(华北电力大学 能源动力与机械工程学院,河北 保定 071003)
0 引言
架空导线弧垂大小是输电线路的安全运行的重要参考依据之一。弧垂过大,对地安全间距不足容易引起导线对地放电;弧垂过小,导线拉力增大,容易导致架空导线断线、断股事故[1]。此外,弧垂也是输电线路增容的限制因素,通过对弧垂的定期测量可以释放潜在的输电容量[2,3]。因此,定期对架空导线弧垂进行测量十分必要。
随着我国特高压输电线路建设的加快,输电线路通常要穿越地形复杂区域,传统的档侧中点高度法、极端角度法和松弛板观测法劳动强度大,已不能适应输电线路的运行维护需求。近年来涌现了许多弧垂测量方法,例如,根据导线力学原理,通过在输电线路上直接安装张力和倾角传感器测量弧垂[4,5],但这种测量方法安装不便,且传感器易受运行输电线路的强电磁干扰而影响测量精度[6]。文献[7]采用双目直升机巡线的弧垂测量方案,该方法新颖,但是采用直升机巡线的测量方案成本高昂。文献[8]拍摄架空输电线路的单张图片,通过对铁塔角点的标定和链码追踪提取导线测量架空输电线路的弧垂,该弧垂测量方案虽成本低,但需要已知输电线路设计参数,适合于日常巡线。
针对目前常见的弧垂测量方法成本高昂,运行维护困难的缺点,基于文献[9]美国电科院sagometer装置的原理,本文采用单目计算机视觉的非接触测量方法,通过固定的摄像机正视拍摄安装在档距中央的标靶,根据相机的线性成像原理识别标靶中心的位置测量弧垂。该方法测量原理简单,适用于弧垂的在线监测,只需完成一次相机标定和相关初始参数记录,就可自动测量架空导线弧垂。
1 单目视觉弧垂测量原理
计算机视觉常用的成像模型有透视投影(针孔成像模型)、正交投影模型以及弱透视投影模型[10]。其中透视投影模型与实际情况最接近,透视投影的简图如图1所示。把光心看做是针孔(即一个点),根据光沿直线传播的原理,则空间物点和光心连线与成像平面的交点就是空间物点所成的像。

图1 摄像机线性成像模型各坐标间关系
在图1中,Ow-XwYwZw是空间世界参考坐标系,O是光心位置,O1-xy为成像平面,其中O1是摄像机主轴与成像平面的交点,又称主心。在不考虑相机畸变的情况下,O1是相机所成图像的中心。以光心为原点,以建立摄像机坐标系O-xcyczc,zc轴垂直于成像平面,且与OO1重合,其中OO1是摄像机的焦距f。
假设空间物点P、Q都在与成像平面O1-xy平行的平面O2-x1y1内,即P、Q两点的相机坐标Zc轴坐标相等。P、Q两物点在成像平面所成像分别为p1、q1,则根据投影关系可知三棱锥O-O1p1q1与三棱锥O-O2PQ相似,即
(1)
式中:λ是相似比;OO1是摄像机的焦距;OO2是光心到计算物点所在平面O2-x1y1的距离;p1q1是成像平面内P、Q两物点所成像的像素距离;PQ是O2-x1y1平面内任意两物点的距离。
则
(2)
因此,如果通过相机标定确定图片单位长度的像素数λ,以及成像平面中p1q1的像素长度,就可确定与成像平面平行的平面上PQ物点的距离。
单目弧垂的测量原理如图2所示。在架空输电线路中,将定焦摄像机水平固定在输电线路杆塔或架空输电线路的一侧,并对准输电线路上的标记物(标靶或间隔棒),当架空输电线路的弧垂发生变化时,标靶会在竖直方向移动,通过图像匹配算法识别标靶在竖直方向移动的像素,再根据相机标定确定的λ,就可确定架空输电线路的弧垂变化。
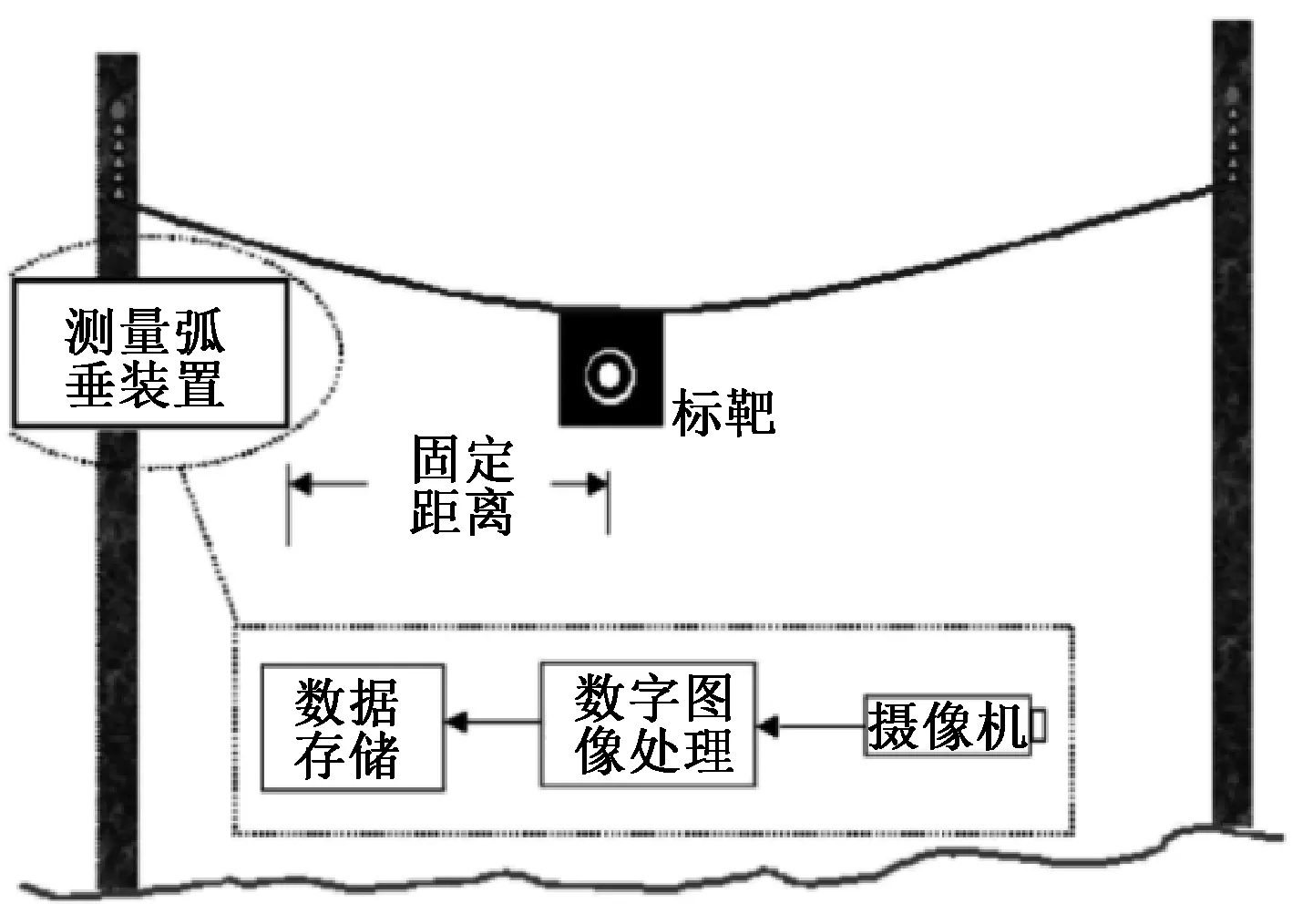
图2 单目弧垂测量示意图
2 基于灰度的图像匹配算法
当架空导线的弧垂变化时,标靶在竖直方向移动的像素数可通过图像匹配算法识别标靶中心位置确定,本文采用基于灰度的匹配算法自动识别标靶。
2.1 灰度匹配算法原理
在计算机视觉中,利用包括待寻找形状参数的模板图像在原图中匹配待找子图像的过程称为图像匹配,基于灰度互相关的图像匹配算法简单,也是最常用的图像匹配算法之一。常用基于灰度互相关的匹配算法有平均绝对差算法(MAD)、归一化互相关算法(NCC)以及Hu不变矩匹配算法等。
图像匹配就是利用已知大小为m×n的模板图像(如图3(b)所示),与大小为M×N原图像(如图3(a)所示)在同样大小的一块区域对比。在图像匹配的最开始,模板图像的左上角与原图像左上角重合,重合部分图像与模板图像其实是两个灰度矩阵,计算两个矩阵的相关系数,而后模板图像平移一个像素,执行同样的计算,依次类推,直到遍历原图像上所有像素点为止。
模板图像与原图像中重合部分称作待匹配子图像,子图像左上角的像素点在原图像的像素坐标为(u,v),记为参考点。模板图像小于原图像,即M>m,N>n。模板图像在原图像上平移后,模板不出原图像的边界,即参考点的像素坐标1≤u≤M-m+1,1≤v≤N-n+1,则在该图像在匹配过程中需要进行(M-m+1)(N-n+1)次匹配计算。
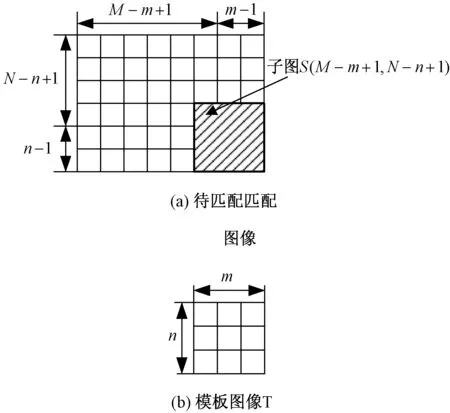
图3 模板与被搜索子图的数学模型
2.2 归一化互相关
在3种基于灰度的匹配算法中,归一化互相关的匹配在匹配速度和鲁棒性上要优于其它两种匹配算法,因此本文采用归一化互相关算法匹配标靶位置。
归一化互相关匹配算法,通过计算模板灰度矩阵与待匹配子图灰度矩阵的互关值来评价两者的相似度,互相关值越大,模板与匹配子图就越相似,匹配程度也就越高。遍历原图中所有位置,找到互相关系数最大的匹配子图位置就是要匹配的图像。

(3)
式中:B(i,j)表示模板图像中像素坐标为(i,j)的像素点灰度值。
(4)
式中:A(u,v)是模板图像中像素坐标为(u,v)的像素点灰度值。
(5)
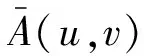
通过求取原图像中每个待匹配子图与模板图像的互相关系数,互相关系数随原图像中不同参考点的变化趋势可用如图4所示的三维柱状图表示。在图中,竖直方向最高的点所对应的像素坐标是所要匹配的子图参考点,该子图就是要匹配的目标图像。
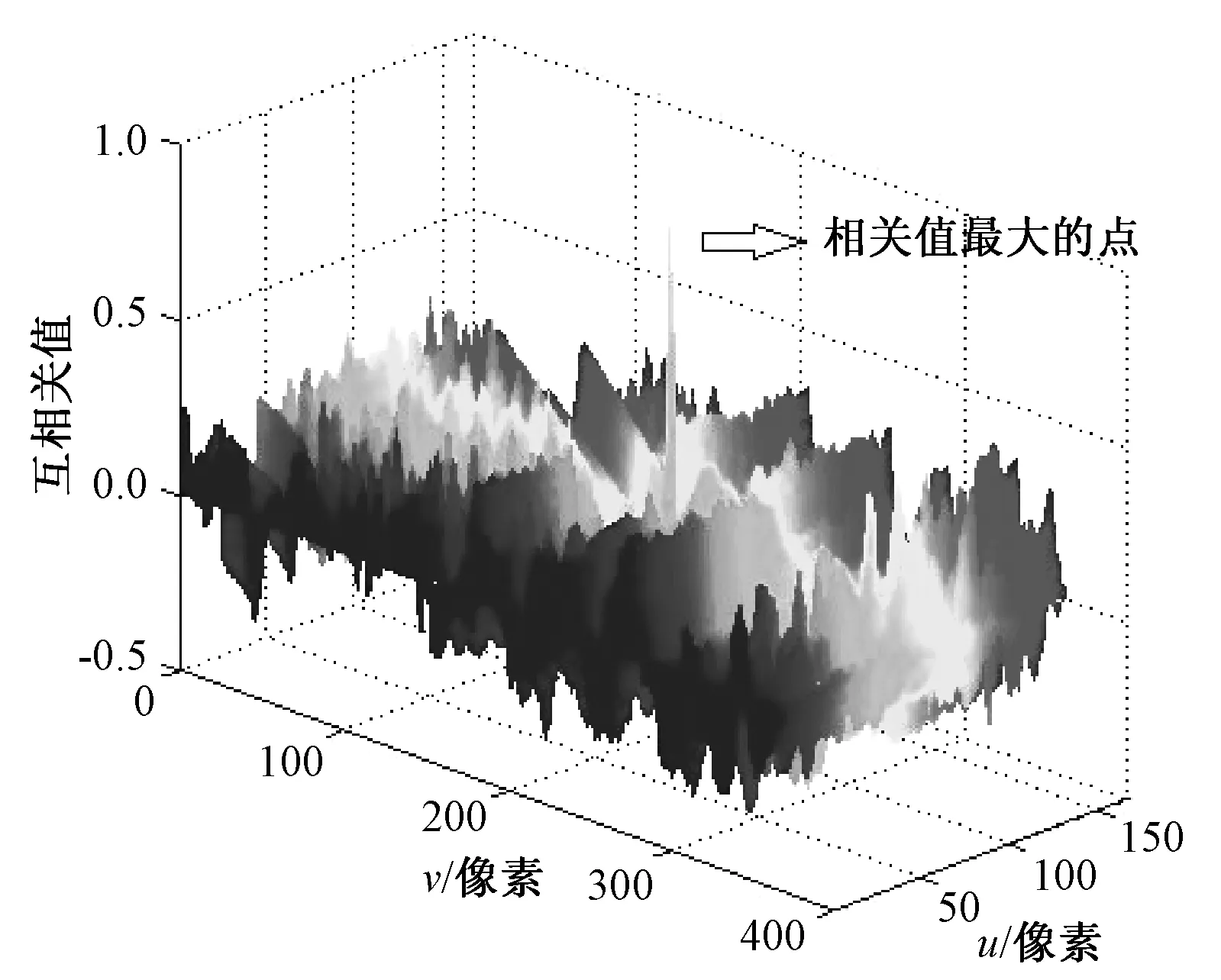
图4 不同参考点处互相关值的三维柱状图
3 实验分析
本文采用的单目计算视觉原理测量弧垂,并进行实验分析。在室外搭建档距为17 m的连续档架空输电线路,在档距中央悬挂标靶,参照文献[11]中集中质量法模拟导线脱冰实验的方法,在档距不同部分段悬挂重物改变弧垂。
3.1 相机标定
首先,对相机进行标定,确定λ。如图5所示,在与标靶同一平面的位置竖直放置一塔尺,确定1 m的高度上所占的像素数。记录此时的初始弧垂和标靶中心点坐标,如下表1所示。

表1 相机标定结果

图5 单目视觉的标定
3.2 图像匹配
悬挂不同质量的重物,在图像中标靶的中心会随着导线的弧垂发生变化。采用归一化互相关的图像匹配算法自动识别标靶中心位置,不同覆冰厚度识别标靶中心位置如图6所示,白色星号标记即为匹配算法识别的标靶中心。

图6 不同弧垂下标靶匹配结果
3.3 弧垂测量结果
已知图像中标靶的像素坐标和单位长度像素数λ,即可计算得到档距中央弧垂,并对比利用单目视觉原理计算弧垂与真实测量弧垂的测量结果如表2所示。
表2 单目视觉弧垂测量的测量结果
由表2的弧垂计算结果可以看出,利用单目计算机视觉测量导线的弧垂有较高的测量精度,相对误差的绝对值可以控制在3%以内,最大测量误差不超过2 cm。因此,不考虑相机畸变的线性成像模型中,通过在架空导线中央悬挂标靶采用单目计算机视觉测量弧垂完全满足弧垂测量的要求。
4 结论
本文采用位置固定的定焦相机正视拍摄悬挂在档距中央的标靶测量导线弧垂,通过DLT线性成像原理解释单目计算机视觉弧垂测量的可行性,并实验验证了采用归一化互相关匹配算法识别标靶中心测量档距中央弧垂,在不考虑相机畸变的线性成像情况下仍具有较高的测量精度,其相对误差的绝对值可以控制在3%以内。
参考文献:
[1]印永华, 郭剑波, 赵建军,等. 美加“8.14”大停电事故初步分析以及应吸取的教训[J]. 电网技术, 2003, 27(10):8-11.
[2]戴沅,钟卓颖,邓小康,等. 基于弧垂实时测量的电力线路动态增容方法[J]. 电测与仪表, 2015, 52(21):68-73.
[3]陈锡阳, 王艳玲, 黄河,等. 一种新的架空输电线路安全限距计算模型[J].电力科学与工程, 2015, 31(2):60-65.
[4]王孔森,盛弋皞,刘亚东,等,基于输电线路轴向张力的导线弧垂在线监测系统[J].华东电力,2011,39(3):0339-0343.
[5]徐青松,季洪献,王梦龙.输电线路弧垂的实时监测[J].高电压技术,2007,33(7):206-209.
[6]ALBIZU I, FERNANDEZ E, EGUIA P, et al. Tension and ampacity monitoring system for overhead lines[J]. IEEE Transactions on Power Delivery, 2013, 28(1):3-10.
[7]仝卫国,李宝树,苑津莎,等. 基于航拍序列图像的输电线弧垂测量方法[J]. 中国电机工程学报,2011,16:115-120.
[8]叶芳, 郭军科, 田锰,等. 基于三维DLT理论的架空导线弧垂测量[J]. 华北电力大学学报(自然科学版), 2017, 44(4):71-77.
[9]王礼田,邵凤莹,萧宝瑾.基于双目视觉稀疏点云重建的输电线路弧垂测量方法[J].太原理工大学学报,2016,47(06):747-751+785.
[10]李传朋. 基于机器视觉和深度学习的目标识别与抓取定位研究[D].太原:中北大学,2017.
[11]王璋奇, 齐立忠, 杨文刚,等. 集中质量法模拟覆冰在架空线脱冰动张力实验中的适用性研究[J]. 中国电机工程学报, 2014, 34(12):1982-1988.
猜你喜欢
中国惯性技术学报(2019年1期)2019-05-21 00:58:30
测绘工程(2018年3期)2018-03-20 03:05:12
北京航空航天大学学报(2017年4期)2017-11-23 05:48:16
计算机测量与控制(2017年6期)2017-07-01 16:23:31
光学精密工程(2016年4期)2016-11-07 09:05:11
集美大学学报(自然科学版)(2015年1期)2015-02-28 01:13:32
机械工程师(2015年10期)2015-02-02 01:13:47
测绘学报(2015年4期)2015-01-14 03:01:28
西安建筑科技大学学报(自然科学版)(2014年5期)2014-11-10 02:34:46
航天器工程(2014年4期)2014-03-11 16:35:37