
无线传感器网络节点传输功率控制算法*
2018-06-05 01:44吴名星谢英辉
传感器与微系统 2018年6期
吴名星, 谢英辉, 单 康
0 引 言
在无线传感器网络[1](wireless sensor networks,WSNs)中,最通常并广泛应用于传感网络的功率管理方法是控制无线射频(radio frequency,RF)传输功率[2~4]。通过选择最优的传输功率,可减少功率消耗和干扰。基于RF传输的功率控制的功率管理方法的目的就是在维持数据正常传输的同时,减少能耗。文献[5]提出了自适应传输功率控制(adaptive transmission power control,ATPC)算法,依据环境条件选择不同的功率,并且控制器考虑了无线信道的波动。引用线性控制律(control law),并依据链路质量调整发射器(transmitter,TX)功率。实验研究表明,此方法能够提高在信道快速变化环境下的数据传输性能。一旦通信链路断裂,则节点通过对接收信号强度指示(received signal strength indication,RSSI)的预测,动态调整TX功率[6]。
本文提出基于传输功率控制器(predictive transmission power controller,PTPC)的WSNs功率控制(PM)算法,PTPC-PM。PTPC-PM算法利用PTPC自动调整节点发射功率等级,进而应对无线信道环境的变化。同时,通过基于PowWow建立真实WSNs仿真平台,机器人携带节点移动,测试PTPC-PM算法在移动环境下的数据包传输率和能耗性能。实验数据表明:提出的PTPC-PM算法能够维持一定的数据包传递率,并降低能耗。
1 网络模型
网络模型如图1所示,整个系统由终端设备(end device,ED)的传感节点和基站(base station,BS)组成,其中ED主要包括RF发射、接收天线以及发射TX功率控制器。
TX功率控制器控制RF发射功率等级。

图1 网络模型
2 PTPC-PM算法
PTPC-PM算法采用PTPC动态调整传输功率等级(transmission power level,TPL),进而应对无线信道的波动,PTPC的框图如图2所示。

图2 PTPC框图
从图2可知,PTPC先与基站训练,然后获取无线信道参数信息。训练过程为:假定传感节点可用的传输功率等级矢量为TP,其包含所有可能TPL,第i个等级TPL表示为tpi∈TP。相应地,当节点以tpi∈TP功率传输信息时,基站接收后,再回复确认包,节点所接收的RSSI为ri∈Ri,Ri为所接收到的所有信号强度值。训练模型如图3所示。

图3 训练模型
节点完成训练后,建立了TP和Ri两个矢量。接收信号强度(dBm)可描述为
ri(tpi)=aitpi+bi
(1)
式中ai和bi为线性参数。通过多次测量,可建立多个式(1)的等式,再利用最小二乘近似算法估计ai和bi。
2.1 反馈RSSI值测量
PTPC-PM算法依据基站与节点间的无线链路,实时测量反馈信号RSSI值,进而调整下次发射功率:
1)节点与基站链路连通:节点周期地接收来自基站BS的反馈消息,计算反馈消息RSSI值的平均值RSSI-FB,并依据RSSI-FB调整下一次的发射功率等级。
2)节点与基站链路发生暂时性的不连通:当节点与基站间链路断开,PTPC利用指数移动平均(exponentially weighted moving-average,EWMA)滤波器估计RSSI值。

(2)
式中 权重系数α∈[0,1]。
EWMA每预测一个值就存入移位寄存器中,但移位寄存器只保存最后3次预测值。考虑到寄存器的空间,若保存更多预测值,需要更大的存储空间。另外,最后3次预测值也能反映空间环境参数。将这3个RSSI值进行线性融合,便可得到最终的RSSI值

(3)
式中K1,K2和K3为3个预测值的融合权值系数。
2.2 发射功率等级调整
依据PTPC调整发射功率等级模型,如图4所示。依据式(1),可建立式(4),再利用当前所接收的信号功率Pst调整下次的传输功率tpk值

(4)

图4 PTPC结构
3 性能仿真
引用文献[7]的CC2500 RF 芯片作为低功率 RF收发器,其中PA可从1~30 dBm变化,且步长为-1dBm[4]。此外,基站的最大传输功率为1 dBm。而EWMA滤波器参数为α=0.6,K1=0.1,K2=0.2和K3=0.7。
为了更好地分析功率调整的性能,建立2个实验。此外,为了更好地分析PTPC-PM算法的性能,选择以固定传输功率和文献[5]的ATPC作为参照。其中,固定传输功率大小为-2 dBm,且记为CLPM-Fixed。
实验一为了更好地分析PTPC-PM算法的功率调整应对时变的无线信道的能力,引用移动场景,如图5所示。节点与基站的最小距离为dmin,最大距离为dmax。最初,节点离基站距离为dmin,然后以速度S远离基站,当距离达到dmax时,节点反向移动,直到距离为dmin。

图5 ED的移动模型
在仿真过程中,dmin=1 m,dmax=20 m。节点的移动速度S最小为0.1 m/s,此外,每当节点移动至ds时,节点停留10 s。节点向基站发送5 000个数据包。
仿真数据如图6所示。从图6可知,ATPC算法不能应对信道波动,没有及时地调整发射功率。在150~250 s期间,TX的发射功率只有-30 dBm,使得链路断裂,导致无法接收数据包。相反,PTPC-PM算法能够及时依据环境调整发射功率,进而维持链路连通,提高数据包传输率。
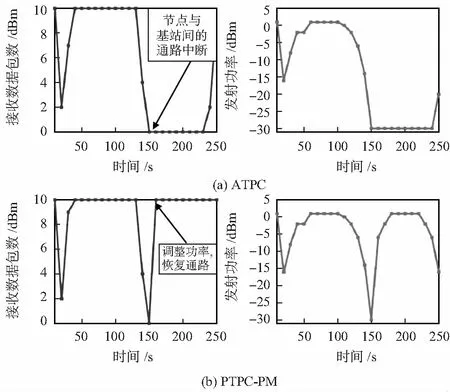
图6 每个时隙内所传输的数据包数和传输功率
实验二实验选择基于PoWWow[8]的真实WSNs平台,为基于MSP430微处理器、5MHz和CC2420RF发射器。PoWWow安装了一个大小为4 cm×6 cm太阳能单元,为设备供电。
实验中有基站和节点2个节点,其中基站连接于主机,主机跟踪和处理由节点发送的数据。节点为安装于机器人上的移动节点。假定机器人以近恒速移动。最初,节点离基站为15 m,发射功率为0 dBm。节点移动到基站,用时约5 min。
选择数据包传递率和能耗作为性能指标。其中,数据包传递率(packet relay ratio,PRR)是指基站所接收的数据包数Nr与节点所发送的数据包数Nt之比
(5)
而能耗是指每接收一个数据包所消耗的能量Eu,即ED所消耗的能量Ec与正确接收的数据包数Nr之比
(6)
Eu反映了成功接收一个数据包所消耗的能量。Eu越低,功率调整性能越优。CLPM-Fixed方案、PTPC-PM算法的数据包传输率和能耗数据如表1所示。

表1 数据包传输率PDR和能耗
从表1可知,本文提出的PTPC-PM算法的PDR略低于CLPM-Fixed算法,例如,当移动速度为0.2 m/s时,CLPM-Fixed的PDR为97 %,而PTPC-PM算法的PDR为93 %。但PTPC-PM算法的能耗Eu远低于CLPM-Fixed算法。在移动速度为0.2 m/s时,CLPM-Fixed的Eu为210 μJ,而PTPC-PM算法的Eu为155 μJ,降低了26.2% 。
4 结束语
本文针对无线传感网络的能耗问题,提出基于PTPC的WSNs的功率控制算法PTPC-PM。PTPC-PM算法利用PTPC调整传输功率等级。通过真实的WSNs的平台仿真,PTPC-PM算法的能耗比固定TX传输功率算法下降了26 %。后期,将进一步研究功率控制策略,如自适应编码,提高能量利用率。
参考文献:
[1] 刘曙琴,陈珍萍,黄友锐.无线传感网络中带延时的一致性时间同步[J].传感器与微系统,2017,36(1):64-66,74.
[2] Chiwewe T M,Hancke G P.A distributed topology control technique for low interference and energy efficiency in wireless sensor networks[J].IEEE Trans on Ind Informat,2012,8(1):11-19.
[3] Zhu Y.Energy-eficient topology control in cooperative Ad Hoc networks[J].IEEE Trans on Parallel Distrib Syst,2012,23(8):1480-1491.
[4] Dai G.Remaining energy-level-based transmission power control for energy-harvesting WSNs[J].Int’l J Distrib Sensor Netw,2012,5(6):34-41.
[5] Lin S.ATPC: Adaptive transmission power control for wireless sensor networks[C]∥Proc the 4th Int’l Conf on Embedded Netw Sensor Syst,2015: 223-236.
[6] 孙 毅,孙 跃,曾 璐,等.基于最优连通功率控制的WSNs跨层路由优化算法[J].传感器与微系统,2014,33(11):135-139.
[7] Kluge W.A fully integrated 2.4 GHz IEEE 802.15.4-compliant transceiver for ZigBee applications[J].IEEE J Solid-State Circuits,2016,41(12):2767-2775.
[8] Berder O,Sentieys O.Powwow: Power optimized hardware/software framework for wireless motes[C]∥Proc of ARCS Workshops,2010:229-234.
猜你喜欢
计算机与数字工程(2022年3期)2022-04-07
移动通信(2021年5期)2021-10-25
民用飞机设计与研究(2020年4期)2021-01-21
空间科学学报(2020年3期)2020-07-24
网络安全和信息化(2018年4期)2018-11-09
无线互联科技(2017年24期)2018-01-22
中国管理信息化(2017年18期)2018-01-04
物联网技术(2017年2期)2017-03-15
中国交通信息化(2014年3期)2014-06-05
自动化与仪表(2014年10期)2014-02-26
