
全自动可变径挖坑机机械结构设计*
2018-06-04 12:02张志敏
机械工程与自动化 2018年3期
张志敏,杨 卫
(青海民族大学, 青海 西宁 810000)
0 引言
国家“十二五”规划中提出生态文化是中华传统文化、和谐文化的重要组成部分,是支撑整个生态文明的基础,据相关数据显示,我国森林面积达到1.95亿公顷 ,森林覆盖率达到20.36%,森林蓄积量为137.21亿立方米,从以上统计数字可以看出,我国森林资源的平均水平依然很低。目前国内外植树挖坑机均采用螺旋叶片,这种挖坑机存在不能变径、出土率低、不方便运输等缺点。为了解决这一现状,本文设计的可变径挖坑机打破常规思维,通过控制可自动改变挖坑直径,该机构具备出土率高、拆装方便、适用性强等优点,并且将来可与全自动四足植树机器人相匹配。
1 可变径挖坑机机构简介
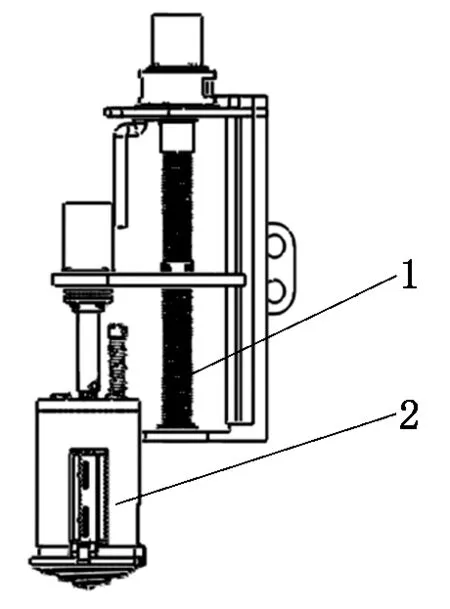
可变径植树挖坑机机构主要由两大部分组成,分别是升降部分1和钻头部分2,如图1所示。其中升降部分1由丝杠螺母机构、升降机构、机架组成,其带动钻头部分实现钻头的上下运动。钻头部分由传动机构、开锁机构、变径机构、旋挖机构组成,传动部分实现钻头的动力输出,开锁机构自动完成圆筒底盖的开闭,变径机构实现钻头直径的变化,旋挖机构实现土壤的旋挖。
该机构可以解决目前植树挖坑机构不能自动变径,不同的坑径要配备不同直径的钻头,且螺旋叶片因为离心力而将挖出的土抛洒较远、回填麻烦等问题。
2 钻头部分机械结构设计
可变径挖坑机构钻头部分主要实现不同直径树坑的旋挖,其主要由传动机构、开锁机构、变径机构及旋挖机构组成,如图2所示。
2.1 钻头传动机构的设计
钻头的驱动采用伺服电机,伺服电机通过DJM弹性膜片联轴器和钻头驱动轴连接,由控制系统控制其转向及转速。由于电机的转速可调,所以没有加减速机构,这样不仅使机构更加简单,而且还可以减轻机构的重量,增强机构的灵活性。钻头传动部分通过销轴和钻头连接,这样在前往林场时拆卸十分方便。经动力学分析钻头驱动轴所受的最大扭矩为1 500 Nm,经校核计算钻头驱动轴最终选用45钢,直径为Φ80 mm。
1-升降部分;2-钻头部分

图2 可变径挖坑机钻头部分
2.2 钻头开锁机构的设计
本设计初衷是让机构实现自动化,不用人手操作就可以全自动地完成变径、旋挖、泄土等一系列挖土工作。由于圆筒内的土必须要通过打开盖底倒出来,所以设计了开锁机构,该机构由压杆1、压杆弹簧2、杠杆3、平置弹簧4、 开底轴5和盖底6组成,如图3所示。压杆1头部的小轴通过顶盖安装在圆筒侧壁杠杆3上,压杆弹簧2套在压杆1上,杠杆3通过平置弹簧4和开底轴5连接,开底轴5通过转动开启或关闭盖底6。
开锁机构的运动机理是给压杆施加向下的压力,压杆向下运动带动杠杆的转动,进而拉动平置弹簧,平置弹簧拉动开底轴转动,开底轴转过一定角度和盖底脱开,底盖打开。由于在前述过程中弹簧均被压缩,待泄完土后会自动闭合。
2.3 钻头变径机构的设计
钻头变径机构可以实现用一个钻头旋挖不同坑径的树坑,它通过液压控制系统控制液压缸的伸长量进而控制刀具架的倾斜程度实现变径。如图4所示,该机构由液压缸1、推力头2、液压推杆3和液压缸载体4(图中未示出)组成。液压缸1通过螺栓固定在液压缸载体4上,液压缸载体4通过螺钉固定在圆筒上,液压缸推力头2和液压推杆3通过销轴连接,液压缸推杆3另外一端和刀具架通过销轴连接。

1-压杆;2-压杆弹簧;3-杠杆;1-液压缸;2-推力头;4-平置弹簧;5-开底轴;6-盖底 3-液压推杆
2.4 钻头旋挖机构的设计
旋挖机构由安装在圆筒侧壁上的两副刀具架和盖底组成,其中利用两点连线旋转360°成圆的原理,安装刀具的刀具架到达不同倾角随圆筒转动旋挖出圆坑,盖底设计有螺旋叶片起挖坑定位和缓冲的功效。刀具架上有进土口,刀具架在未撑开时切削的土主要从刀具架上的进土口进入圆筒内,刀具架上设计有两把刀具,一把在未撑开时不切土,当刀具架撑开时两把刀具同时工作,提高切削效率。刀具架上设计有滑槽安装刀具,这样刀具损坏后更换很方便,使得挖坑机的维修更加经济。盖底也设计有进土口,螺旋叶片提升上来的土通过进土口进入圆筒内,提高钻头的出土率。
可变径挖坑机旋挖机构由刀具架1、刀具2、圆筒3、盖底螺旋叶片4组成,如图5所示。刀具2安装在刀具架1的滑槽内,头部用螺钉固定,刀具架1尾部通过销轴与圆筒连接,刀具架1可绕这点转动;盖底螺旋叶片4通过销轴连接在圆筒侧壁,可绕该点转动完成盖底的开启闭合。
3 升降部分机械结构设计
可变径挖坑机构升降部分带动钻头进行上下运动,其主要由动力机构、丝杠螺母机构、升降机构及机架组成,如图6所示。
3.1 动力机构的设计
动力机构未来要由单片机控制,所以升降部分的动力机构选用伺服电机,可以通过控制系统控制伺服电机的速度,进而控制丝杠螺母的转速,实现对升降机构上升下降速度的控制。由于伺服电机的轴太短,所以采用联轴器和丝杠连接,联轴器有一定的高度,本设计采用电机支撑架将伺服电机支撑起来。动力部分由伺服电机1、联轴器2、电机支撑架3组成,如图7所示。联轴器2和伺服电机1连接,电机支撑架3通过螺钉固定在机架上,伺服电机1通过螺钉固定在电机支撑架3上。

1-刀具架;2-刀具;3-圆筒;4-盖底螺旋叶片

图6 可变径挖坑机升降部分
3.2 丝杠螺母机构的设计
挖坑机械的工作条件比较恶劣,所以机构在下降时振动比较大,要求机构运行平稳,而且挖坑机构根据各地的自然条件要将钻头提升不同高度,并且可以停留一段时间。丝杠螺母机构能够满足以上所有要求,它运行平稳,而且能反向自锁。本设计将丝杠固定在机架上,螺母带动钻头进行升降运动。本机构由丝杠螺母机构1、升降板2、推力调心滚子轴承3组成,如图8所示。推力调心滚子轴承3安装在机架上,丝杠1两端过盈配合安装在轴承内圈,升降板2上的螺母和丝杠配合。

>1-伺服电机;2-联轴器;1-丝杠螺母机构;2-升降板;3-电机支撑架 3-推力调心滚子轴承
3.3 机架的设计
机架是整个机构的载体,该机架可以和机器人手臂或拖拉机连接,机架上设计有滑道,其中丝杠螺母机构通过机架上端安装在滑槽内,加强了升降装置的刚度。机架机构由机架1和升降压板2组成,升降压板2通过螺栓固定在机架上,如图9所示。
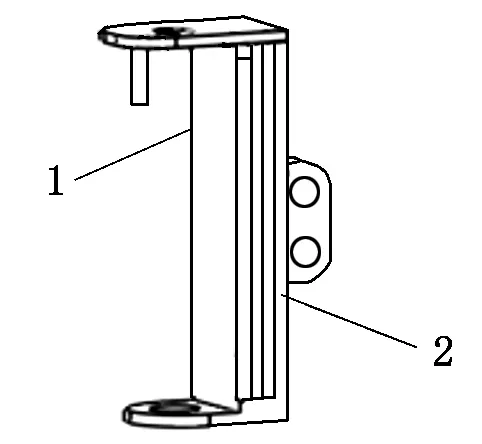
1-机架;2-升降压板
4 结语
本文设计的可变径挖坑机机械机构,通过采用中空圆筒钻头实现可变径的挖坑功能,解决了目前国内外挖坑机不能变径、出土率低、回填麻烦等问题。经仿真验证,该平台具有可自动改变刀具直径、出土率高、挖坑效率高、回填容易等优点。
参考文献:
[1] 于建国,屈锦卫.国内外挖坑机的研究现状及发展趋势[J].农机化研究,2006(12):45-46.
[2] 张金玲,孙嘉燕.轻型挖坑机结构设计[J].农机化研究,2009(7):162-163.
[3] 渠聚鑫.新型自走式植树挖坑机的研究[D].北京:中国林业科学研究院,2009:1-10.
猜你喜欢
小猕猴学习画刊(2021年8期)2021-08-27
汽车实用技术(2021年12期)2021-07-03
装备制造技术(2020年1期)2020-12-25
趣味(数学)(2020年5期)2020-11-16
数学大王·低年级(2020年8期)2020-08-14
现代园艺(2017年22期)2018-01-19
重庆理工大学学报(自然科学)(2017年8期)2017-09-12
石油矿场机械(2015年11期)2015-08-04
焊接(2015年8期)2015-07-18
泰州职业技术学院学报(2014年5期)2014-02-28
