基于船舶融合点迹行为识别的雷达监视系统
2018-06-04 08:08陈晓利祁云嵩林嘉炜
计算机与现代化 2018年5期
陈晓利,祁云嵩,林嘉炜
(江苏科技大学计算机学院,江苏 镇江 212003)
0 引 言
高效的雷达监视系统应当具备全天候、全时域、全方位主动探测的特点,对雷达站位置近海30海里范围内的所有船舶实现跟踪识别[1],从而扩充我国近海活动目标监管手段,为打击近海非法捕捞、盗采海砂、非法海上旅游等综合执法行动[2]提供有效的信息支撑,为近海交通运输、渔业生产、防御灾害性天气等提供及时可靠的服务信息保障[3]。同时大量采集类似船舶轨迹和航行信息等元数据以便将来从中挖掘出隐藏的、未知的、有益于决策的关系、模式和趋势[4]。
目前较为成熟的船舶交通服务系统(Vessel Traffic Service)[5]的技术领域在国际上主要以美国、欧洲、日本为主,同时我国现已建成VTS系统的关键技术几乎全部来自国外,对沿海国防安全带来了严重的威胁。每个厂商的VTS数据库标准各不相同,这导致不同厂商的设备无法进行信息交换和数据共享[6],更存在着初建成本高、修护费用高的问题。同时,由于现有VTS仅在港口范围内进行架控,故而在更为广泛的海岸线及海岛周围的监管一直处于空白的状态,所以,随着本文基于雷达的船舶监视系统的实现与逐步完善,希望能够弥补这些空白,使我国的海上监管手段更丰富,覆盖面更为全面。
1 系统功能结构设计
1.1 系统的基本构成
系统利用岸基雷达的主动探测性能,在沿海建设雷达监测站,实现对重点渔港及水域的雷达监视监测信号基本覆盖,并融合雷达、AIS信息及CCTV视频等多路监测信号,有效补充和完善现有的渔船信息系统监控网络。系统的基本构成框架如图1所示。

图1 系统的基本构成
1.2 软件架构
系统采用3层分离的系统架构[7-8],其中数据传输层以DDS(Data Distribution Service)[9]为基础构建数据总线子系统,业务逻辑层包含视频子系统、雷达子系统、VHF子系统、记录回放子系统、综合管理子系统、船舶行为识别子系统,用户界面层包含显控子系统,如图2所示。从设计角度来讲该模式具有系统资源利用合理的优点,可以适应系统设计中高频、高数据量、高复杂度数据交换的需求。同时,从系统开发角度和应用角度来考虑,3层架构模型比双层或者单层架构模型具备更大的优势:
1)3层模型适合群体开发,每个研发者可以有不同分工,协同工作从而提高整体研发效率。
2)具有较高的安全性。
3)支持远程访问资料(Remote Access),可以通过Internet存取远程数据,方便了开发人员对实地数据的获取。
4)High Performance(提升运算效率)解决集中式运算(Centralize)及主从式架构(Client-Server)中数据库主机的运算负担,降低数据库主机的Connection Load,并可藉由增加App Server处理众多的数据处理要求[10-11]。软件架构设计如图2所示。

图2 软件设计架构图
1.3 运行环境
雷达站基站服务器与指挥中心服务器使用工作站,操作系统为Windows Server 2008,数据库使用Oracle 11g。
显控台终端为PC机,操作系统为Windows 7 x64旗舰版。
2 船舶行为识别
2.1 点迹提取
在本系统中,采用雷达设备获取管辖水域的实时交通图像[12],作为监管、评估和显示的基础,同时辅配AIS接收装置,从而获取监管范围内的多源数据。雷达子系统设备的选择将直接影响系统功能的发挥。雷达子系统主要由雷达天线、收发机、控制器以及维修终端等组成。根据设备配备原则,综合考虑某地海洋与渔业信息监测中心监管目标的特点、系统使用性能要求、可靠性、价格等因素,本工程雷达天线选择6英尺X波段、线极化、裂缝天线,25 kW雷达收发机。
整个系统融合目标的处理流程如图3所示。
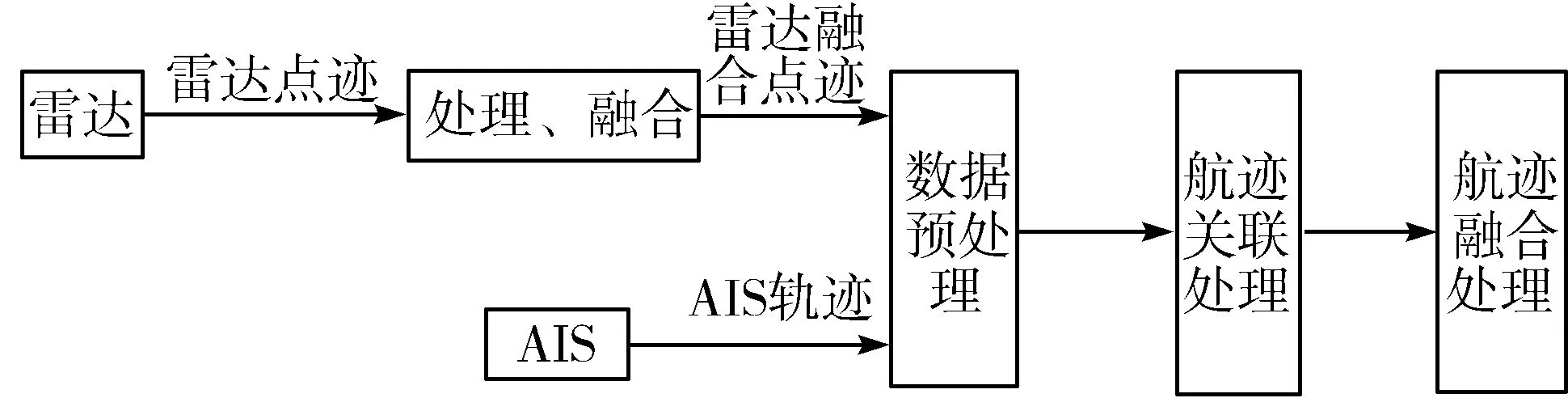
图3 融合目标流程
AIS与雷达作为2种工作方式截然不同的传感器,AIS为船舶主动发射信号,基站被动接收信号,雷达则主动探测目标,并且在数据的采样间隔时间和精准度上两者也有着极大的不同。故而在数据获取途径可能的前提下,融合多源数据可以得到更为准确、丰富的船舶航迹。
2.2 基于地域信息位置特征点提取的点迹段划分
由于船舶运行过程中地域位置的不同对船舶运动行为的影响度较大,故而在传统点迹段划分取特征段的过程前,使用基于地域信息位置特征点提取的点迹段划分方法(Regional Information Feature Points Extraction, RIFPE),加入对区域信息的识别处理,使得划分后的轨迹段尽量保证在1个或者2个区域内,以提高行为识别的准确性。具体方法如下:
对于区域A中的任意2个顶点Vi(xi,yi)、Vi+1(xi+1,yi+1),某船舶位置坐标Q(xj,yj),连接QVi、QVi+1,两线之间的夹角为θi:
(1)
判断所有轨迹点的位置信息,分析得出边界点集合,继而将整条航迹按是否在区域内的标准分为数段子轨迹。对于划分后的子轨迹,由于AIS与雷达融合数据的点较为密集,故而减少船舶数据点的同时又能最大相似地还原原始轨迹是轨迹划分的重要任务。选择平均航速变化率作为一个阈值,大于阈值的选入特征点集,小于阈值的舍去[14]。

(2)
将提取后的点迹集合导入Matlab中分析,运用式(2)计算得到特征点的候选集,为图4中圆圈表示的位置点。
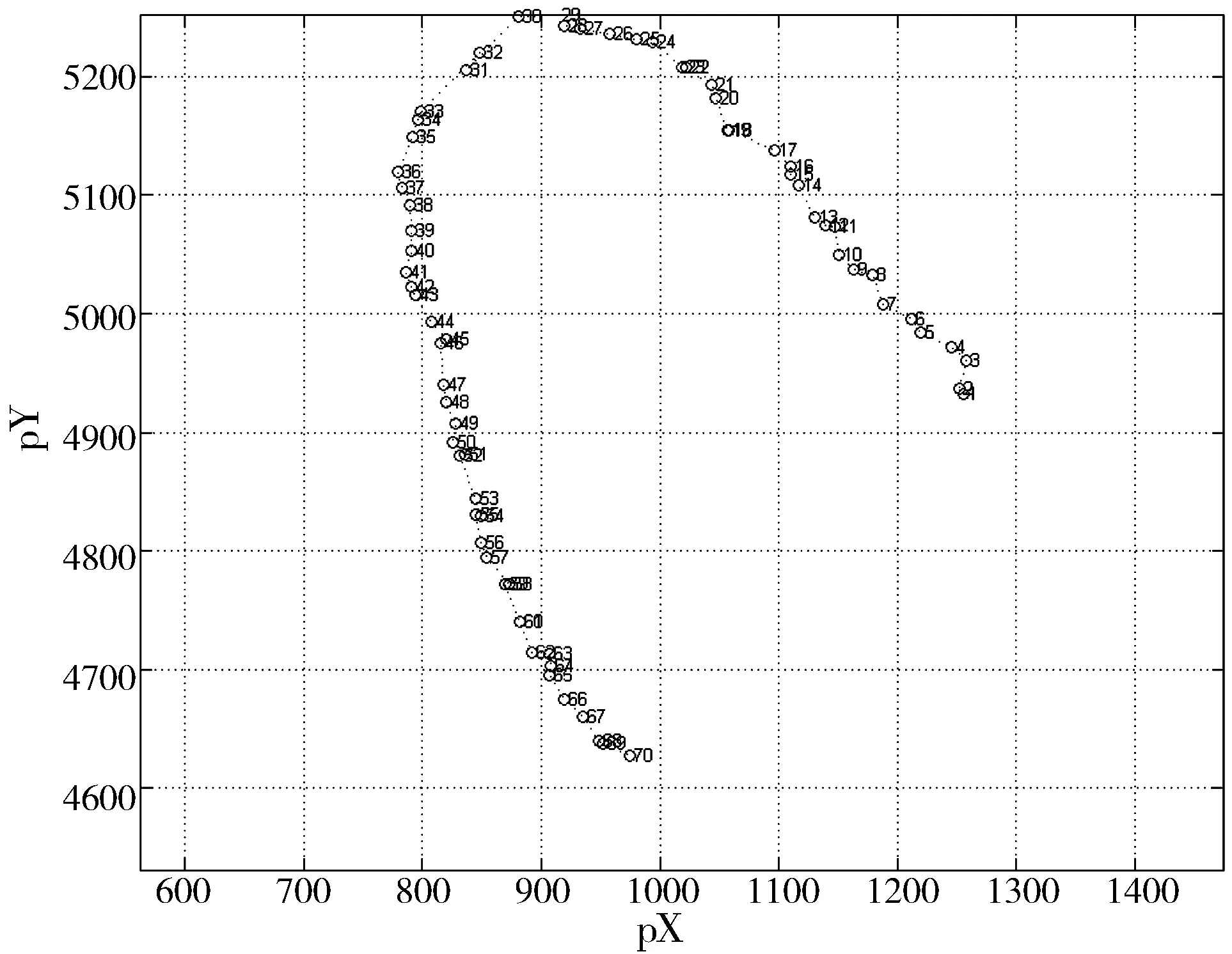
图4 特征点的候选集

(3)
(4)
其中:A为假设条件,D为描述的数据,L(A)为假设条件的开销,L(D/A)为在A的这种条件下数据D的开销,len()为轨迹的总长度,R(pipj)为任意2个特征点轨迹的拟合度排名,N(pipj)为与pi连接的轨迹数,E(pi)为特征点pi的逃脱因子。
由式(3)和式(4)可知,当L(A)越大,选取的特征点越多,与原轨迹相似度越高,根据贝叶斯公式可知L(D/A)越小;相反,选取的特征点越少,L(D/A)越大。当两者之和达到最小时可获得一个全局最优解,最终得到基于地域信息位置特征点提取的最优点迹段。
2.3 轨迹段模型的建立
轨迹段的处理采用向量自回归模型(VAR)和因子分析[17-18]。船舶轨迹的形成主要与船的速度v、船行驶的时间t、船的航向dir、船所在位置的经度x及纬度y有关,是影响船舶轨迹的内生变量。向量自回归模型是基于数据的统计性质建立模型,采用多方程联立的形式,在每一个方程中,内生变量对模型的全部内生变量的滞后值进行回归,从而估计全部内生变量的动态关系。
因此,根据船舶轨迹的影响因素建立VAR模型:
(5)
其中t=1,2,…,T,式(5)右边的矩阵是k维内生变量列向量,p是滞后阶数,T是样本个数。Φ1,…,Φp是k×k维矩阵,εt是k维扰动列向量。v1t、dir1t、x1t、y1t能动态地反映出某一时间段内船的一段运动轨迹。运用SPSS16.0软件进行KMO(Kaiser Meyer Olkin)值和Bartlett检验后所得到的相关实验数值,通过检验后,对v1t、dir1t、x1t、y1t进行因子分析。对于上述选取的4个指标,利用因子分析的主成分分析法对原始数据矩阵进行初始因子求解提取2个公因子作为初始因子,集中反映了速度、航向等的情况,对初始因子进行方差极大化正交旋转和斜交旋转法从而使得因子更加具有直观意义,最终得到明确的因子解释与累计方差贡献率。
v1t、dir1t、x1t、y1t的主成分因子f1、f2根据回归法的计算后可得系数分别为α1、α2、α3、α4、β1、β2、β3、β4,则主成分因子由系数表示的线性组合为:
f1=α1v1t+α2dir1t+α3x1t+α4y1t
(6)
f2=β1v1t+β2dir1t+β3x1t+β4y1t
(7)
同时,在因子模型中,利用主因子与贡献率(权重加权法进行汇总)作为权数进行加权得到综合评分函数:
F=εf1+ηf2
(8)
得到的F可作为某船只在某一区域内(外)的一小段轨迹的判断阈值。
对于该船只在该区域内(外)的其他轨迹段阈值分别求F1,F2,…,Fn,并进行方差分析,得到一个总阈值:
(9)
(10)
2.4 行为识别
对不同船只在不同区域位置的轨迹阈值集合F(m)={F(1),…,F(k)},先进行预处理,选择合适的数据结构存储训练数据和测试元组。由规定的k种行为方式,设定参数k,维护一个用于存储最近邻训练元组的大小为k的优先级队列。随机从训练元组中选取k个元组作为初始的最近邻元组,分别计算测试元组到这k个元组的距离,将训练元组标号和距离存入优先级队列。遍历训练元组集,计算当前训练元组与测试元组的距离,将所得距离L与优先级队列中的最大距离Lmax进行比较,若L>Lmax,则舍弃该元组,遍历下一个元组。若L≤Lmax,删除优先级队列中最大距离的元组,将当前训练元组存入优先级队列。遍历完毕,计算优先级队列中k个元组的多数类,并将其作为测试元组的类别。测试元组集测试完毕后计算误差率,继续设定不同的k值重新进行训练,最后取误差率最小的k值。输入需要判别船舶的数据,根据模型,得到轨迹阈值,计算该阈值与k个簇之间的距离并取其中的最小距离,即可判断该船的轨迹行为属于距离最小的簇,从而完成船舶的行为判别。
3 应用分析
本系统应用于某监测中心,建立一批小物标雷达监测站,设立雷达检测指挥中心。该系统是以C++开发,采用Visual Studio 2010开发工具,使用的数据库及版本为Oracle 11g R2,UI界面采用QtitanRibbon实现,图形绘制库使用OpenGL,运行环境为Windows 7及以上。整体系统的运行效果如图5所示。
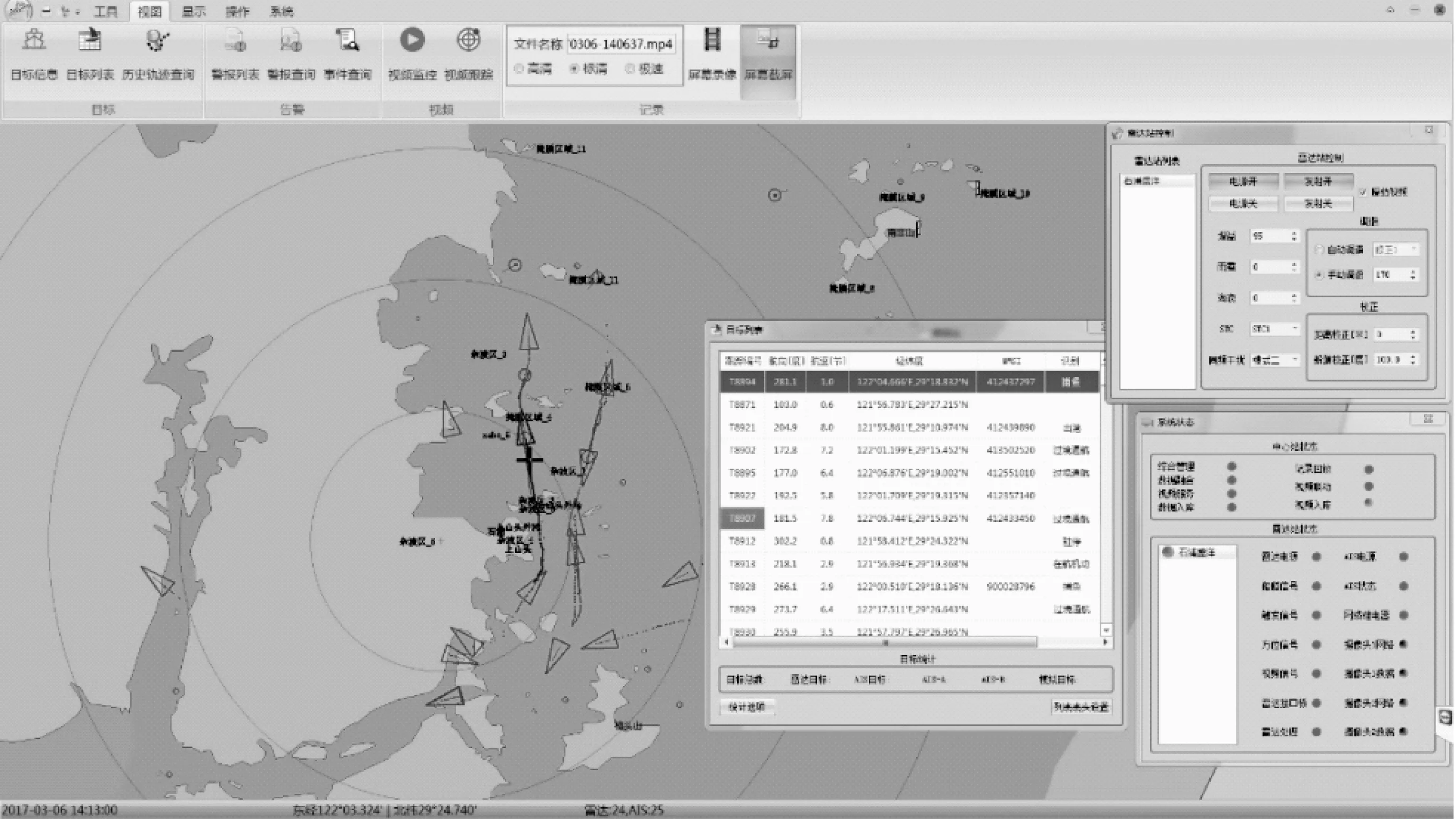
图5 系统运行效果
图5中,部分船只会没有识别状态,分析得出其原因有以下几点:
1)目标刚起始,可供参算的点迹段较少;
2)由于虚警致使的假目标;
3)由于起始后不久便驻停导致的参算点过少;
4)由于船舶漂航候港造成的识别结果异常;
5)由操作员手动取消该船舶的识别。
船舶在海上避开障碍物和与他船相会时,航向和航速的控制往往是有不同的;即使在同一个航道中航行,进出港的航速控制也是不同的。因此,基于地域划分下的轨迹段划分是提高行为判别准确率的必要条件。以正常避障为例,船只在系统内跟踪到的航行轨迹如图6所示。虚线区域为海岛附近浅滩,T20为当前系统下拥有融合航迹的一艘船舶。图7为根据地域划分的条件下将轨迹划分的结果,图8为不使用地域条件划分的结果。

图6 原始航迹

图7 地域划分
对于该船舶在海岛附近航行的轨迹段分别使用与不使用本文提出的划分方法,识别模块会对划分后的轨迹段进行分析处理,给出预测行为,其识别结果如图9和图10所示。

图9 地域性划分目标轨迹识别效果

图10 非地域性划分目标轨迹识别结果
根据船舶的实际情况可知,该船在行驶过程中遇到海岛,该行为正常避障。由图9可发现地域性划分后的识别结果更为贴切,而由图10知非地域性划分的结果与实际情况不符,因此,基于地域性划分的轨迹行为识别优于基于非地域性划分的轨迹行为识别。
4 结束语
测试结果表明,系统的整体运行稳定,网络通信顺畅,数据采集准确,识别结果具有参考价值,达到了预期的设计要求。随着本系统的投入使用,希望给我国的近海监控提供稳定而强有力的技术手段,同时,随着系统的实地架设,可以对本文提出的识别模型提供更多样、更丰富的实地数据,从而进一步提升识别的准确率。识别模块以及整体系统的优化与完善是接下来仍需持续投入精力的主要工作。
参考文献:
[1] 吴立知. 水下信息有效通信在船舶事故避障中的应用[J]. 舰船科学技术, 2016,38(20):100-102.
[2] 罗大伟. 海岸船舶交通监控系统研究与实现[J]. 舰船科学技术, 2016,38(8):85-87.
[3] 王海宁. 船舶交通管理系统(VTMS)概述[J]. 现代电子工程, 2001(1):5-11.
[4] 何苗. 移动对象的时空轨迹聚类算法研究[D]. 兰州:兰州大学, 2013.
[5] 马晓丽,陈珊,张晓蕾. 智能船舶交通管理系统设计与研究[J]. 舰船科学技术, 2016,38(22):58-60.
[6] 刘月胜. 深圳港VTS综合信息系统的研究[D]. 大连:大连海事大学, 2006.
[7] 陈传波,夏义兵. 基于ASP.NET技术及三层网络架构的权限管理系统模型[J]. 计算机工程, 2003,29(12):101-102.
[8] 王进. B/S模式下的三层架构模式[J]. 软件导刊, 2011,10(3):30-31.
[9] 杨鑫辉,张慧翔. 基于DDS的异构网络数据分发方法研究[J]. 计算机技术与发展, 2014,24(11):57-60.
[10] Wang Wei, Yang Jiong, Muntz R R. STING: A statistical information grid approach to spatial data mining[C]// Proceedings of the 23rd International Conference on Very Large Data Bases. 1997:186-195.
[11] Ester M, Kriegel H P, Sander J, et al. A density-based algorithm for discovering clusters in large spatial database with noise[C]// Proceedings of the 2nd International Conference on Knowledge Discovery and Data Mining. 1996:226-231.
[12] 梁秀梅. 无人艇视觉系统目标图像特征提取与识别技术研究[D]. 哈尔滨:哈尔滨工程大学, 2013.
[13] 孙爱玲,赵光华,赵敏华,等. 基于sign(x)函数的点在多边形内外判别算法及应用[J]. 计算机工程与科学, 2017,39(4):785-790.
[14] 肖潇,邵哲平,潘家财,等. 基于AIS信息的船舶轨迹聚类模型及应用[J]. 中国航海, 2015,38(2):82-86.
[15] 黄泽洋,邵哲平,潘家财,等. 基于AIS的大型船舶靠泊航速分布规律[J]. 中国航海, 2016,39(2):55-58.
[16] 徐德志,申红婷. 网页排名算法及其应用[J]. 贵州大学学报(自然科学版), 2007,24(5):491-494.
[17] 张延群. 全球向量自回归模型的理论、方法及其应用[J]. 数量经济技术经济研究, 2012(4):136-149.
[18] Kim J O, Mueller C W. 因子分析:统计方法与应用问题[M]. 叶华译. 上海:格致出版社,上海:上海人民出版社, 2012.
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
电脑报(2021年14期)2021-06-28
铁道通信信号(2020年3期)2020-09-21
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
软件学报(2019年11期)2019-12-11
计算机与生活(2019年5期)2019-07-18
铁道通信信号(2018年8期)2018-11-10
现代装饰(2018年5期)2018-05-26
吉林大学学报(理学版)(2018年2期)2018-03-29