
一种结合H∞滤波的SINS/GPS组合无人机定位算法
2018-06-04 03:06王昆仑陶庭叶黄祚继王春林
测绘通报 2018年5期
王昆仑,陶庭叶,黄祚继,王春林
(1. 合肥工业大学土木与水利工程学院,安徽 合肥 230009; 2. 安徽省(水利部淮河水利委员会)水利科学研究院,安徽 合肥 230088)
近年来,低成本、微小型无人机定位技术在军用和民用领域得到广泛使用,其中导航定位技术是无人机应用的关键[1-2]。惯性导航作为一种主要的导航方式,具有自主性强、隐蔽性高、短期输出的导航参数(位置、速度、姿态)精度较高等优点,缺点为长期精度较低,并且误差随时间而累积。GPS是一种高精度的导航方式,它具有定位精度高,同时输出速度信号和姿态信号等优点,但存在更新率较低、信号易受干扰等不足,无法满足实时定位的要求[3]。将惯性导航和GPS组合起来,用GPS信息对惯导信息进行修正,取长补短,既提升了单独使用惯性导航的长期定位精度,又降低使用高精度惯性元件的成本,从而提高定位的精度及系统的稳定性。
本文设计一种运用于SINS/GPS组合式定位系统的H∞滤波技术,将H∞范数引入滤波问题,使得干扰信号输入到滤波误差输出的H∞范数最小[4]。该方法相较于Kalman滤波器在处理系统过程噪声中的不确定性具有很好的稳健性,可以保证组合导航定位的精度、提高系统的可靠性。
1 组合式导航定位设计
根据H∞滤波原理,惯性元件的各类误差作为系统的不确定性误差,需要得到组合系统的系统噪声、量测噪声和初始误差估计的先验信息[5-6]。设计中首先建立组合式导航系统的状态方程,其次在系统误差方程的基础上建立量测方程,然后进行定位误差修正,从而减小误差,进一步提高定位精度的可靠性。
SINS/GPS组合导航方式可以根据组合深度的不同分为紧密组合和松散组合两种[7]。松散组合是一种在实际应用中较为常见的组合,组合中GPS和惯导各自发挥自己的作用,互不干扰,用GPS信息辅助惯导,校正惯导累积误差[8-9]。本文根据实际情况选择了工程上易于实现,组合效果较为明显的位置、速度组合的松散组合方式。将SINS和GPS所有的量测量作为滤波器的量测量,这样一方面可以实现长时间内精度较高的GPS信息对SINS进行校正,另一方面防止一旦惯导失效,GPS信息可以实现补充。组合导航原理设计如图1所示。

图1 组合系统输出校正原理
2 组合导航模型方程的建立
2.1 SINS/GPS组合导航系统的状态方程
导航中误差量都表现为非线性,但具有一定精度的导航系统的误差量均可看做小量[10-11],非线性方程中子误差量的高阶项都可看做高阶小量而忽略不计,因此误差方程可以描述为线性的[12-15]。组合导航系统的状态仅取系统导航参数误差,此时系统的阶次为9阶。导航坐标系选取为E-N-U坐标系,其误差方程为

(1)
其中

(2)
W=[ωgxωgyωgzωaxωayωaz]T
(3)

2.2 SINS/GPS组合式导航量测方程
SINS/GPS组合方式有很多种,本文使用的是H∞滤波进行位置、速度的组合,将GPS输出的位置和速度信息与SINS输出的相应信息相减得到量测方程为
(4)
(5)
式中,λS、LS为SINS输出的经度和纬度信息;λG、LG为GPS输出的经度和纬度信息;VS为SINS输出的速度信息;VG为GPS输出的速度信息;δλ为经度中误差;δL为纬度中误差;H1为量测矩阵;VGPS为GPS的量测白噪声。
2.3 离散型H∞滤波算法
将系统方程(1)及量测方程(5)进行离散化处理,可得
(6)
使用H∞滤波算法对式(6)进行处理,表达式为
(7)
式中,k=0,1,2,…,其中θ需满足
(8)

3 SINS/GPS组合导航系统H∞滤波仿真试验
3.1 飞行轨迹的设计
仿真需要对飞行轨迹进行设计,首先建立Simulink仿真环境。使用Aerosim工具箱中的飞行器模块编写轨迹发生器,生成飞机轨迹参数,再以该参数作为基础,通过仿真子系统仿真产生SINS系统所需要的比力、角速率惯导数据,获取飞机的飞行航迹信息[16-18]。
本文载体飞行状态包括快速拉升、8字形、S形、转弯、巡航等过程。飞行时间设置为300 s,初始位置为[31.82°,117.17°]。根据SINS算法中加速度、速度、位置、姿态角的变化规律及耦合关系所设计的飞行轨迹仿真如图2所示。

图2 无人机轨迹仿真结果
3.2 仿真试验
针对文中SINS/GPS组合导航系统性能进行研究,设计了仿真环境,参数见表1。
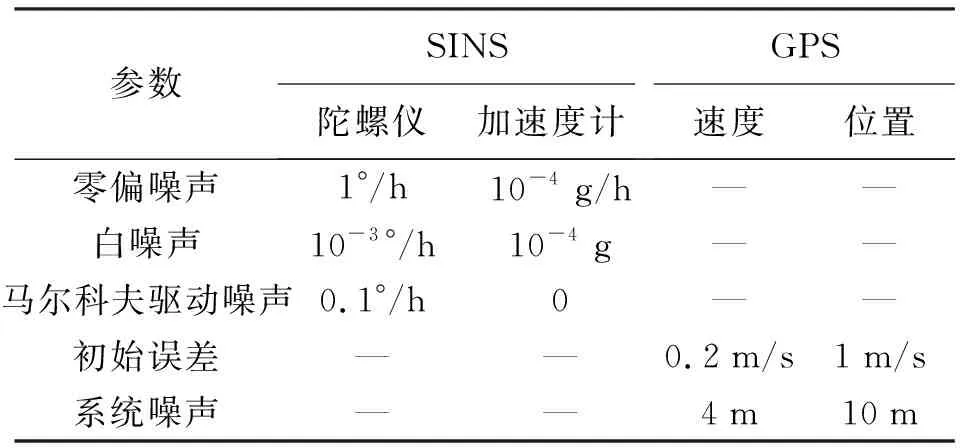
表1 仿真参数设置
3.3 试验分析
根据设计,进行多次无人机试验,验证得出统计结果见表2。
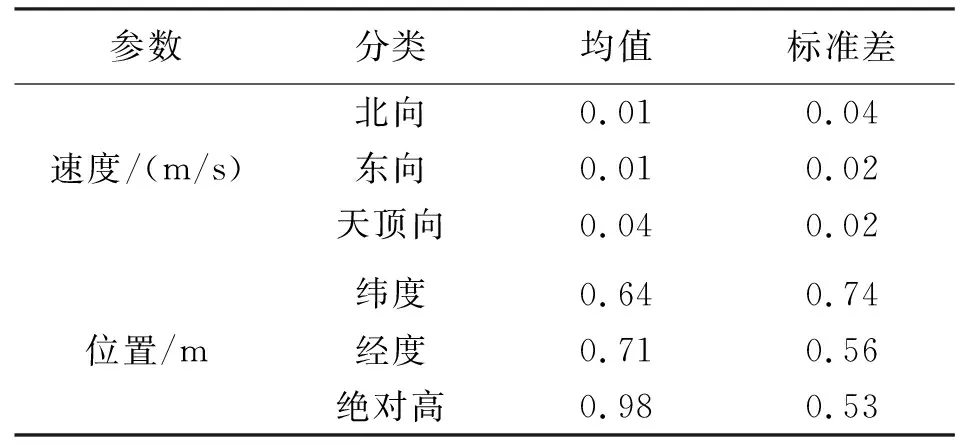
表2 H∞滤波SINS/GPS组合导航系统导航误差
(1) 根据图3和图4可以看出在300 s时间内,纯SINS各项误差随时间的累积不断增大,可得出纯SINS各项参数随时间的累积而快速发散,因此无法满足高精度导航要求。
(2) 根据图5和图6仿真结果可以看出,当GPS的位置和速度信息被引入以后,再经过H∞滤波进行修正,相比于纯SINS惯性导航,随时间的增加,其位置和速度误差得到了明显的收敛。表明H∞滤波可以有效地克服纯SINS随时间发散的现象。

图3 速度误差曲线
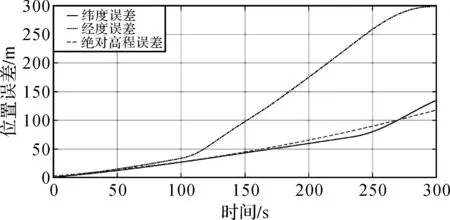
图4 位置误差曲线
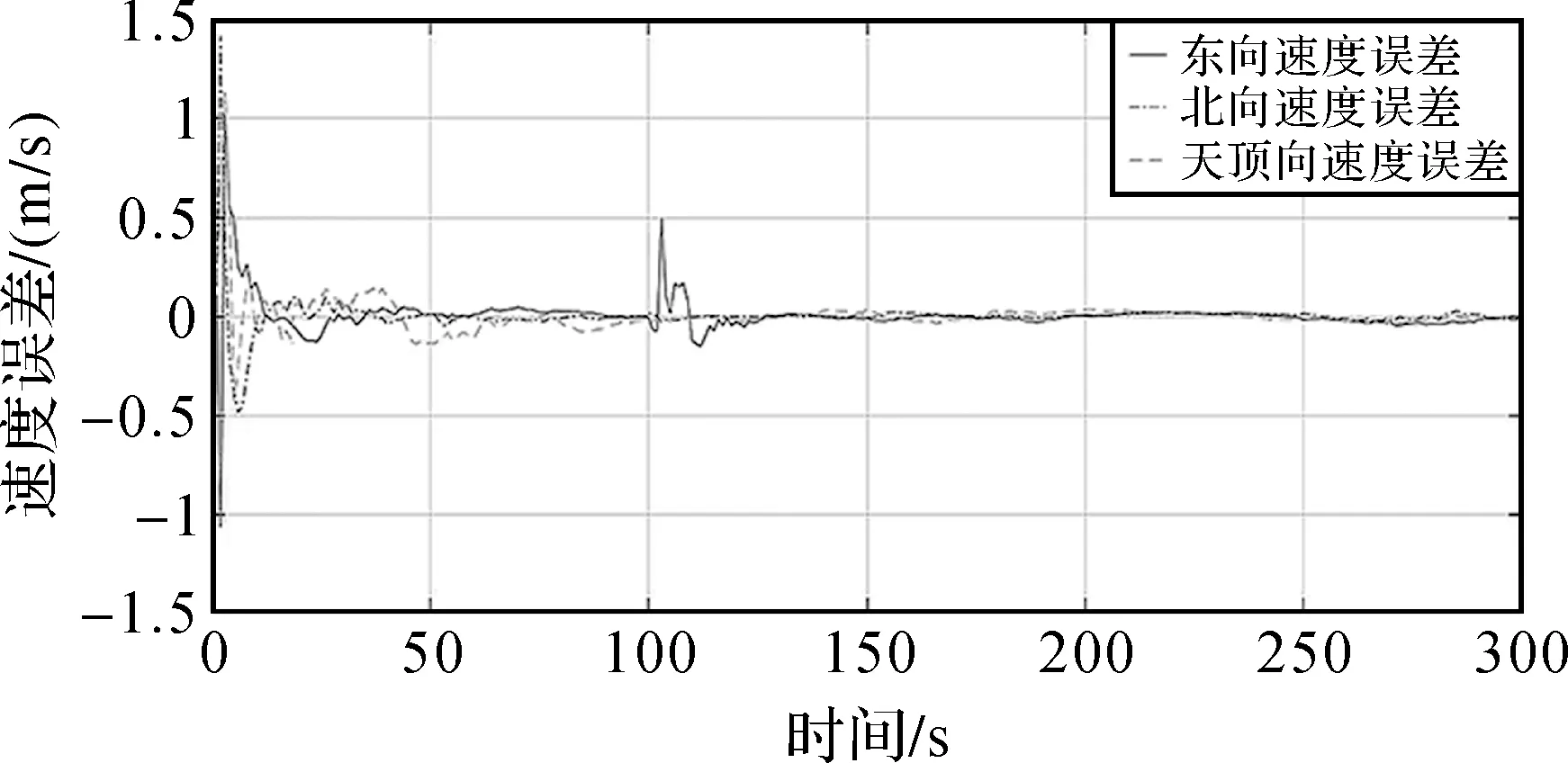
图5 速度误差曲线
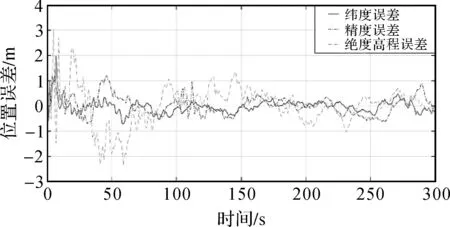
图6 位置误差曲线
(3) 根据表2试验统计结果可以得出,水平速度误差均值达到0.01 m/s,位置误差均值优于1 m。表明采用H∞滤波设计组合导航定位方式能够明显提高动态飞行时的精度。
4 结 论
本文分析了SINS和GPS各自的优缺点,研究了SINS/GPS组合式惯性导航系统,建立了无人机高精度目标定位的仿真平台,通过引入GPS信息修正了系统的速度和位置信息,并使用H∞滤波算法对设计进行仿真测试,降低了系统累积误差,提高了定位的精度和可靠性,能够满足一般低成本无人机定位精度要求。经过仿真模拟验证了该方法的有效性,是一种无人机项目中可以实现的设计方法。
参考文献:
[1] 秦永元.惯性导航[M].北京:北京科技出版社,2006:99-107.
[2] 朱家海.惯性导航[M].北京:国防工业出版社,2008:35-38.
[3] 牛欢,廉保旺.一种基于改进 UKF 滤波的 GPS+PDR 组合定位方法[J].测绘通报,2017(7):5-9.
[4] 严恭敏,翁浚.捷联惯导算法与组合导航原理[M].西安:西北工业大学出版社,2016:6-7.
[5] 王峥,周剑.基于Kalman滤波的大规模GNSS网参数估计方法[J].测绘通报,2017 (1):18-21.
[6] 胡高歌,刘逸涵,高社生.改进的强跟踪UKF算法及其在 INS/GPS组合导航中的应用[J].中国惯性技术学报, 2014,10(5): 12-17.
[7] 杨元喜,陆明泉,韩春好.GNSS 互操作若干问题[J].测绘学报,2016,45(3): 253-259.
[8] 程传奇,郝向阳,张振杰.鲁棒性地形匹配/惯性组合导航算法[J].中国惯性技术学报,2016,24(2):14-16.
[9] XIONG Z,LENG X F,LIU J Y.Research of SAR/INS Integrated Navigation System Aided by BeiDou Double Star Position[J].Journal of Astronautics,2007 28(1):88-93.
[10] BESER J,ALEXANDER S,CRANA R,et al.A Low-cost Guidance/Navigation Unit Integrating A SAASM Based GPS and in a Deeply Coupled Mechanization[C]∥Proceedings of ION GNSS 2004.Fairfax VA:Institute of Navigation,2002.
[11] LI W J.Effective Adaptive Kalman Filter for MEMS-IMU/Mangetometers Integrated Attitude and Heading Reference Systems[J].Journal of Navigation,2012,1(1):1-15.
[12] 钱华明,雷艳敏,谢常锁.组合导航系统几种滤波方法的分析比较及其性能评价[J].中国惯性技术学报,2006,14(6):95-99.
[13] XUE M,LING H B.Robust Visual Tracking and Vehicle Classification via Sparse Representation[J].IEEE Trans-actions on Pattern Analysis and Machine Inteligence,2011,33(11):2259-2272.
[14] WANG D,LU H C,YANG M S.Online Object Tracking with Sparse Prototypes[J].IEEE Transactions on Image Processing,2013 22(9):314-326.
[15] BABU R,WANG J.Ultra-Tight GPS/INS/PL Integr-ation:a System Concept and Performance Analysis [J].GPS Solutions,2009,13(1):75-82.
[16] 陈敏,安艳辉,李晓华.捷联惯导系统仿真器的设计与实现[J].现代测绘,2012,35(1): 10-11.
[17] 王新龙,李亚峰.SINS/GPS 组合导航技术[M].北京:北京航空航天大学出版社,2014:2-3.
[18] 秦永元,张洪钺,汪叔华.卡尔曼滤波与组合导航原理[M].西安:西北工业大学出版社,2015:288-292.
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
电子制作(2018年16期)2018-09-26
中学生数理化·八年级物理人教版(2018年4期)2018-06-27
北京航空航天大学学报(2018年1期)2018-04-20
中国惯性技术学报(2017年1期)2017-06-09
中国惯性技术学报(2017年1期)2017-06-09
百科探秘·航空航天(2016年9期)2016-12-01
火控雷达技术(2016年3期)2016-02-06
海军航空大学学报(2015年1期)2015-11-11
