基于视频的车型精确判断
2018-06-04 03:41宋俊芳西藏民族大学信息工程学院
数码世界 2018年5期
宋俊芳 西藏民族大学 信息工程学院
1 基于固定背景的车辆高度算法
在视频序列检测中,设置一虚拟线圈(如图1图片底部1/3位置灰色线条所示),检测所得到的交通参数均为车辆经过线圈时的交通参数。通过图1可以看到,不同大小的车辆经过同一线圈时存在明显差异,尤其表现在车高方向上。本文所论述的原理和方法正是基于这种思想。本文通过车辆经过线圈时候的当前帧与背景进行相减运算,得到车辆所在纵向的灰度直方图,计算公式如下:
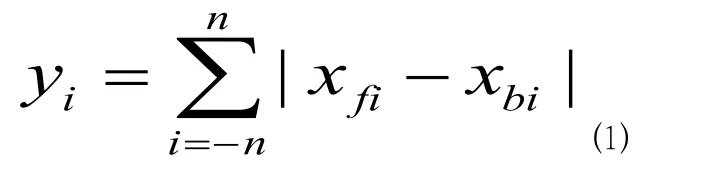
其中表示纵向第行所对应的灰度值,表示前景灰度,表示背景灰度,表示左右各综合考虑了个点。与固定背景差得到的灰度直方图如图2所示:

图1 不同车辆经过同路段
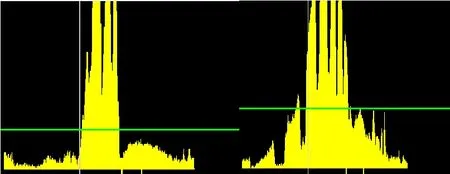
图2 大小两车经过线圈时的车高方向与背景差直方图
通过图2可以看到,大小车辆对应的灰度直方图存在明显差异。总体来说大车高度(右侧灰度线与水平阈值线的交点)要高于小车高度。而且车辆边界跟背景分解比较明显(灰度直方图与水平阈值线的右交点)。
在某些应用场合中,仅仅用车辆高度判断车型是远远不够的,因为有的大车本身不高,或者有的大车车顶灰度难免跟背景灰度很相似,就算使用改进之后的帧差法也难以检测到正确的车顶位置,因此本文将通过下面的基于车长的车型辅助判断方法对上述问题进行改进校正。
2 基于车速的车长计算方法
本文借助车辆通过虚拟线圈时二值化图像,当车头到达虚拟线圈位置时其二值化触发车长帧数计数,在其后的连续几帧内,车辆慢慢通过线圈,帧数计数器继续累加计数,直到车尾完全通过,二值化目标消失,结束车长帧数计数。此时我们便得到了该车以通过虚拟线圈所用帧数为计量单位的长度大小,设其为 帧。根据前面我们前期研究的在基于视频序列的车速计算方法,假设该车的在通过线圈时的行驶速度为 厘米/帧,则车长计算公式如下:

3 基于车高和车长的车型判断方法
本文所论述的车型分类算法将各车按其车身大小将车分成大,中,小3个类型。大型车主要包括大型客车,货车,以及工程车,小型车主要包括各种两厢小型私家车,小型面包车,以及一些微型皮卡,中型车是指除了大型和小型车以外的其他车辆,主要包括一些小型货车和小型客车。本文首先通过车长在大范围对车型进行限定性的判断,其判断逻辑如(3)式所示:
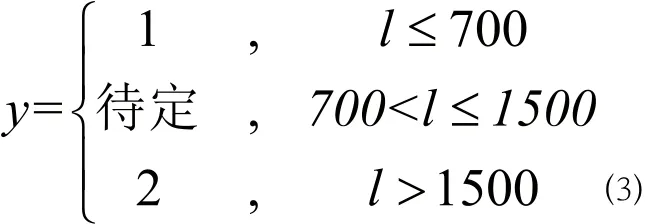
在公式(3)中我们假设,小型车为1,中型车为2,大型车为3。通过公式可见,当车长小于或者等于700厘米时直接可以断定该车为小型车,而当车长大于1500厘米时可直接判定该车为大型车,当车长在这两个值所确定的范围之内时,则应该根据车高进行判断,其判断逻辑如公式(4)所示:
公式(4)中的表示从虚拟线圈位置往上以像素行数为度量单位的车辆高度。通过上面的叙述可见,车型判断的最终结果是公式(3)和公式(4)按照一定的优先级进行联合判断的结果,公式(3)的优先级要高于公式(4)的优先级。
5 结论
本文所论述的车型判断方法具有较好的实用性和高效性。在高速公路隧道内某段时间内的车型统计结果中,正确率达到98%,可见本文所论述的车型分类方法具有较高的识别精度,可用于实际交通环境应用中。
[1]郭辉.基于视频的车辆检测和车型识别的研究[D].华东交通大学,2009.
[2]吴亚斌,陈淑荣.一种基于监控视频的车型识别和车流量检测算法[J].微型机与应用, 2015, 34(7):45-48.
[3]李涛,叶茂,向涛,等.实时的基于交通视频的车型检测系统:, CN 103886760 A[P]. 2014.
[4]张全元,戴光明,陈良.一种新的基于实时视频流的车型识别算法[C]//图像图形技术与应用学术会议. 2008.
[5]袁爱龙.基于视频的汽车车型识别研究[D].电子科技大学, 2013.
[6]樊养余,张晶,张辰锐,等.一种基于视频的车型识别方法:,CN103593981A[P]. 2014.
[7]季晨光,张晓宇,白相宇.基于视频图像中的车型识别[J].辽宁工业大学学报(自然科学版), 2010, 30(1):5-7.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
安徽电子信息职业技术学院学报(2020年5期)2020-11-13
摄影之友(影像视觉)(2018年12期)2019-01-28
小小说大世界(2017年4期)2017-04-06
初中生世界·八年级(2017年3期)2017-03-24
汽车与新动力(2015年1期)2015-02-27
人民交通(2014年12期)2014-04-27
环球时报(2010-01-20)2010-01-20
汽车观察(2009年8期)2009-09-24