
龙门导轨磨床横梁的静动态分析及结构改进*
2018-06-02 06:46千红涛程雪利安林超王红旗
制造技术与机床 2018年4期
千红涛 程雪利 安林超 王红旗
(河南工学院机械工程系,河南 新乡 453003)
大型数控龙门导轨磨床作为机床行业必不可少的工作母机,其加工精度直接影响到其他机床关键零部件的导轨精度,从而间接影响了各类终端产品的加工精度。与国外相比,我国龙门导轨磨床起步稍晚,目前在磨削精度、机床精度保持性及可靠性、自动化程度等方面还存在一定差距。近几年来,以上海重型机床厂、华东数控股份有限公司为代表的一批生产厂家,不断加大自主研发力度,大幅度提高了我国龙门导轨磨床的技术水平[1]。
活动横梁作为龙门导轨磨床的重要承载件之一,是加工过程中最薄弱的一个环节,其静、动态刚度对安装在横梁上面的磨头部件的运动精度有很大影响,对整机加工精度的稳定性也起着至关重要的作用[2]。随着计算机技术和数值计算方法的迅速发展,数字化设计与结构仿真分析在机械工程中的应用越来越广泛,仿真分析结果在产品的设计与制造过程中起着重要的指导作用。目前已有不少学者通过有限元、边界元或其它数值方法,对不同类型机床的整机或零部件做了静态、动态、模态、热变形等分析,并以分析结果为依据改进原有结构,提高机床的静、动态性能。例如刘献军等[3]曾利用Hyperworks软件对大型平面磨床的横梁进行了静力学分析,根据结果设计了卸荷装置以减小横梁的变形;马海[4]、Peng等[5]曾利用Abaqus等软件对横梁和立柱进行静、动态分析,并基于灵敏度分析的方法对零件进行了轻量化设计;张森等[6]利用有限元软件对横梁组件进行了静、动态分析,并改进了横梁的筋板结构;另外还有对整机[7]或床身[8-9]等进行有限元分析的例子,均非常有效地为提高机床性能提供了设计参考依据。
设计横梁结构时主要考虑以下3个方面:一是加工工艺性要好,易于制造和装配;二是静刚度要高,在静载荷或缓慢匀速运动载荷下的变形量小;三是动刚度要好,在外界激振力作用下的抗振性高[2]。综合以上3个因素,本文对某大型数控龙门导轨磨床的活动横梁进行了有限元分析及结构改进。首先采用SolidWorks软件对龙门组件(包括双立柱、固定连接梁以及活动横梁)进行三维建模,然后利用Abaqus软件进行静态和模态分析,重点研究横梁的导轨变形量以及结构的固有频率。根据有限元分析结果以及仿生学原理[10],改进横梁结构件的断面形状以及筋板布置形式,优化拓扑结构。最后通过比较原有结构与改进后结构的横梁基准轨变形曲线,验证设计的合理性和有效性。
1 活动横梁的静力学分析
1.1 静力学分析模型的建立
机床的龙门组件由双立柱、连接梁、活动横梁、支撑体以及磨头组件组成,如图1所示,图中卧、立磨头位置为常用工位,卧磨头位于横梁中间,此时横梁的弯曲变形最大,按照此工位进行静力学分析。立柱与连接梁固定,活动横梁可沿左右立柱上的导轨作升降运动,活动横梁导轨上有两个横向拖板,分别装有一套立式万能磨头、一套卧式周边磨头,两磨头可实现横向运动和垂直运动。活动横梁长约8 m,立柱高约6.3 m,左、右立柱间距约6 m。本文采用SolidWorks软件进行三维实体建模,为了减小计算量同时为了避免计算过程中出现不必要的不收敛现象,分析模型中忽略了螺栓、螺母、键和销等小型连接件,以及小倒角、小圆角、定位孔、键槽等小特征结构。
将三维实体导入Abaqus软件进行有限元建模,在实际工况下,所有部件均会产生弹性变形,但为了更直观地观察到横梁的变形情况,同时也为了减低计算量,本文不考虑立柱、连接梁和支撑体的变形,即在分析模型中将这3个部件进行刚体约束。
模型中各部件的材料及参数如下:活动横梁导轨垫以及支撑体的材料为45钢,在软件中设置45钢的弹性模量为2.06×105MPa、泊松比为0.3、密度为7 850 kg/m3;活动横梁、左右立柱、连接梁、磨头组件的材料为HT300,在软件中设置HT300的弹性模量为1.3×105MPa、泊松比为0.25、密度为7 300 kg/m3。

各部件之间的连接关系如下:
(1)活动横梁与导轨垫之间无相对位移,设置连接关系为绑定(tie)。
(2)活动横梁下端面与支撑体上端面之间无相对位移,设置连接关系为绑定。
(3)活动横梁垂直导轨面与立柱导轨面之间可以垂直移动,设置连接关系为面对面接触(surface-to-surface contact),立柱导轨面为主面,活动横梁垂直导轨面为从面,法向“硬”接触,即接触面之间的作用力垂直于接触面,根据材料性质设置切向摩擦系数为0.1。
(4)活动横梁水平导轨垫面与卧、立磨头组件导轨面之间可以水平移动,设置连接关系为面对面接触,活动横梁水平导轨垫面为主面,磨头导轨面为从面,法向“硬”接触,根据材料性质设置切向摩擦系数为0.05。
(5)立柱与连接梁、立柱与支撑体之间均无相对位移,结合面之间的连接关系均设置为绑定。
载荷与约束:立柱底面固定在地面上,约束立柱底面全部方向的自由度为零;为避免分析过程中出现磨头组件沿导轨移动的情况,约束其沿导轨方向的自由度为零。卧、立磨头在加工时运动非常缓慢,磨削力相对于自身重力而言可以忽略不计,将活动横梁和磨头组件自身的重力作为施加载荷进行分析。
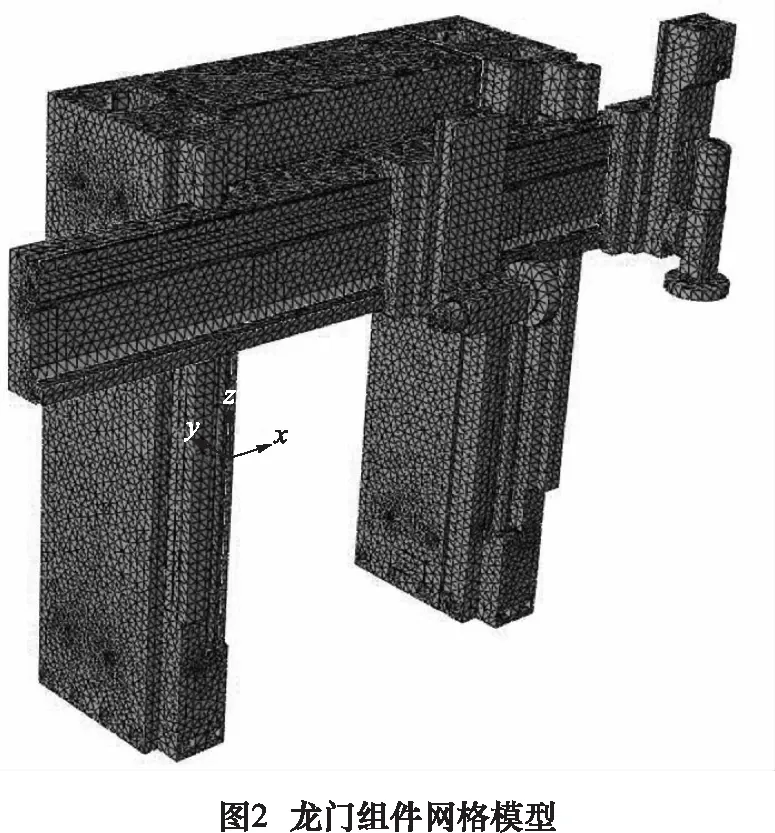
网格划分:网格的划分关系到计算时间以及计算精度,在进行带接触的非线性静力学分析时还会影响到结果的收敛性。综合考虑模型及计算设备等因素,本文选择C3D10M这种修正的二次四面体单元,这类单元计算速度和精度适中,可以划分任何复杂三维模型结构,可以进行接触分析,设置全局单元尺寸为100 mm,在定义了接触连接关系的导轨部分将单元尺寸加密为10 mm、20 mm或50 mm。生成的网格模型如图2所示。
1.2 静力学仿真结果分析
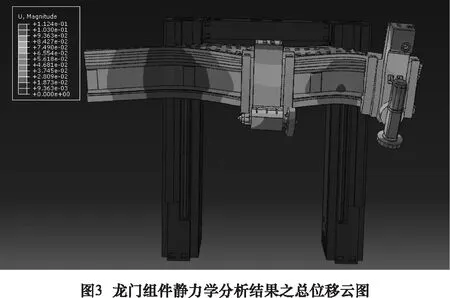
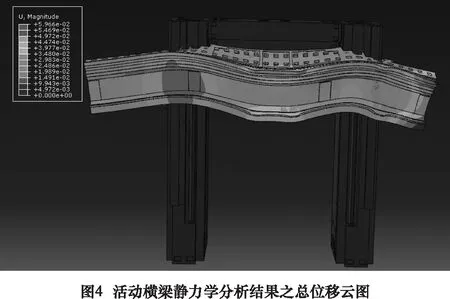
静力学分析得到的总位移分布云图如图3所示。图中显示最大位移发生在两个磨头组件上,这是因为磨头组件的总位移是自身变形量加上横梁相应位置的变形量组成,并不是本文所关注的最大变形位置。为了观察活动横梁的变形结果,将卧、立磨头组件从装配体中隐藏,如图4所示。从图中可以看出,卧、立磨头作用的部位变形量较大,而这些部位正是影响加工精度的关键位置,最大变形位于立磨头作用的区域,最大位移约0.06 mm,即活动横梁右侧悬臂处,可见悬臂结构的抗弯曲和抗扭转能力较差。
1.3 活动横梁的模态分析结果
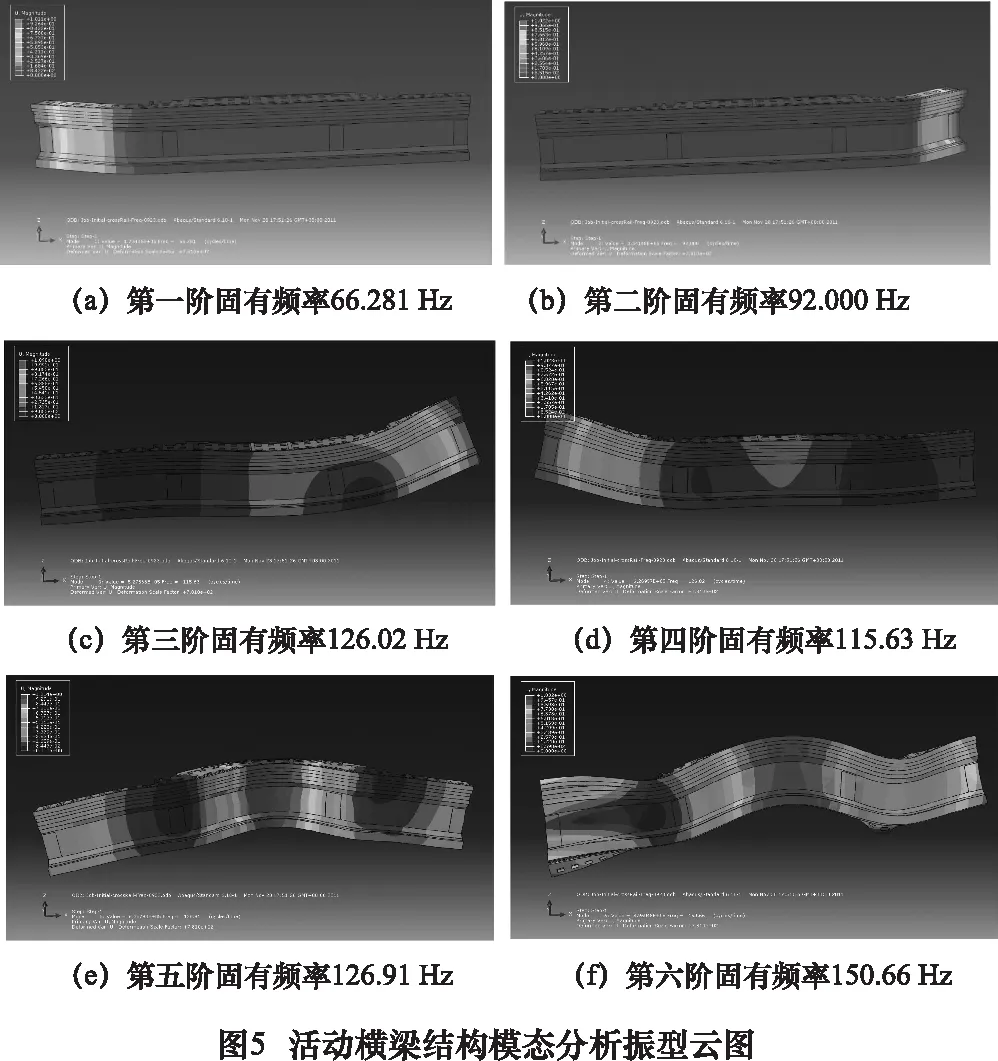
图5是活动横梁模态分析结果的前六阶固有频率和振型,从第一阶固有频率66.281 Hz到第六阶固有频率150.66 Hz,总体而言避开了主轴电动机的固有频率50 Hz;从振型来看最易产生变形的部位为两端悬臂处,其次为最中间的部位。
2 活动横梁的结构改进及结果对比分析
2.1 结构改进
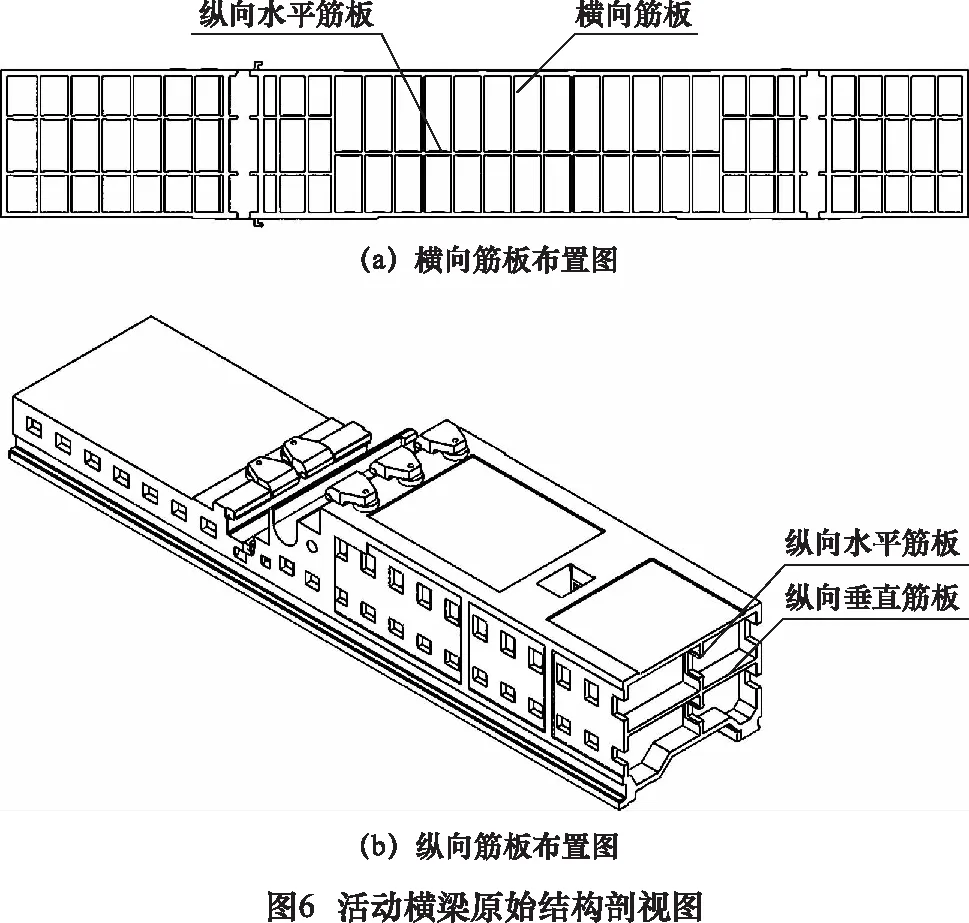
为了不影响改进后活动横梁的装配,本文只对横梁内部筋板的拓扑结构进行改进,不改变外部整体形状和尺寸。从前面的分析结果来看,应重点提高结构的抗弯和抗扭刚度,而传统的筋板结构多是平行、井字、米字或其组合,抗弯刚度较低,质量较大,如本文所研究活动横梁的筋板结构即为传统的井字型结构,如图6所示,内部分为横向、纵向水平以及纵向垂直3种平行筋板。
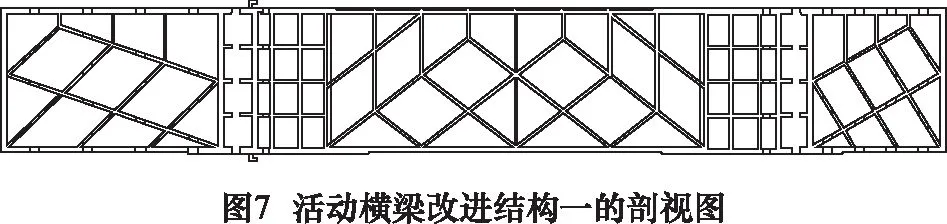
为克服传统结构的缺陷,仿生结构被广泛研究并应用到机床的筋板设计中,如文献[10]根据王莲叶脉的分布规律改进了龙门五面加工中心的横梁。本文首先依据该原理对原始结构进行第一次改进,改进后结构剖视图如图7所示,横向筋板以及纵向水平筋板的布置形式参考了叶脉的纹路,去掉了纵向垂直筋板,筋板厚度保持不变。
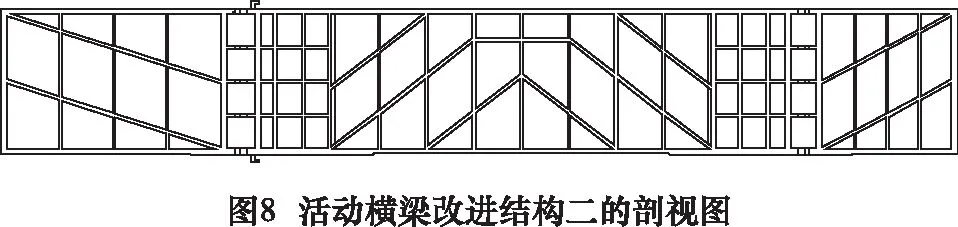
为了降低第一种改进方案的工艺复杂性,再次修改内部筋板结构如图8所示。保留了从支撑部位向最大变形区域布置的斜向筋板,在横梁的中间部分形成三角形支撑,横向筋板与原始结构中一致。
2.2 结果对比分析
按照同样的分析方法,使用Abaqus软件对改进后的两种横梁结构分别进行了静力学分析以及模态分析,位移变形云图和低阶振型图与原始结构一致,质量和变形量都有所减小,固有频率有所提高。从静力学分析结果得出关键部位的变形量如表1所示,改进结构一的质量最轻,悬臂处的最大变形量最小,但中间部分的最大变形量却最大;改进结构二的质量和变形量都减小了很多,总体而言是最为理想的改进方案。
表1 静力学分析结果对比表

原始结构改进结构一变化率改进结构二变化率横梁质量/t14.56513.474-7.49%13.569-6.83%悬臂处最大变形/mm0.059 660.058 46-2.01%0.058 69-1.62%中间部分最大变形/mm0.050 410.056 99+6.78%0.04746-5.85%
模态分析结果如表2所示,两种改进结构的固有频率都得到了提高,再次验证了改进方案的效果。
表2 前六阶固有频率对比表
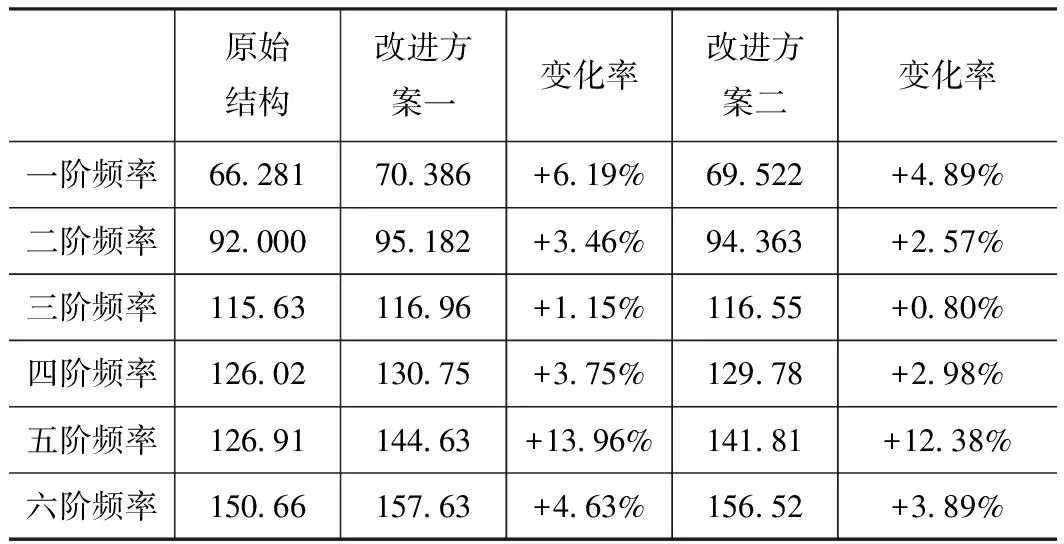
原始结构改进方案一变化率改进方案二变化率一阶频率66.28170.386+6.19%69.522+4.89%二阶频率92.00095.182+3.46%94.363+2.57%三阶频率115.63116.96+1.15%116.55+0.80%四阶频率126.02130.75+3.75%129.78+2.98%五阶频率126.91144.63+13.96%141.81+12.38%六阶频率150.66157.63+4.63%156.52+3.89%
3 活动横梁基准导轨变形曲线对比
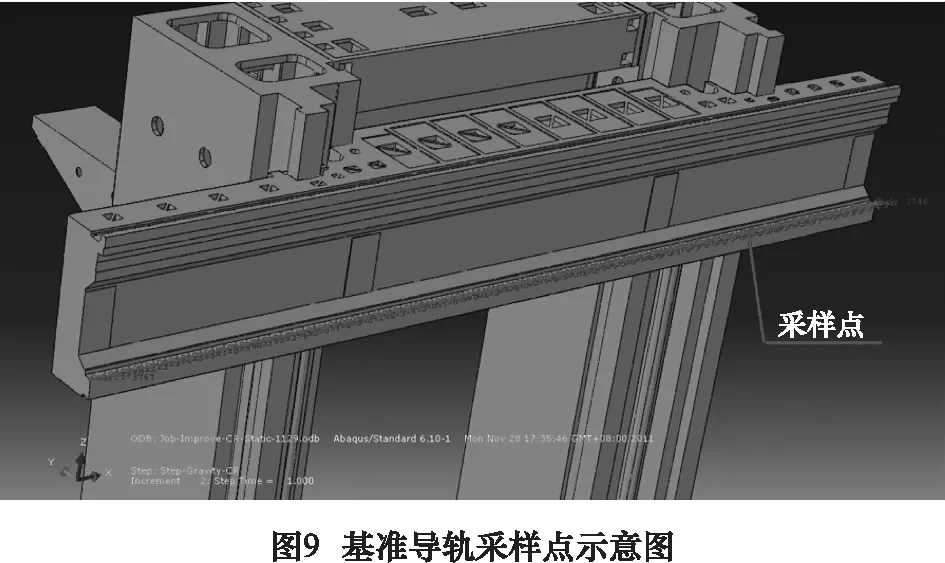
活动横梁基准导轨主要用来承受卧、立磨头横向拖板的重量,其变形量对加工精度有较大影响。考察横梁原始结构与改进结构二的基准导轨变形曲线,采样点如图9所示,采样点间距为100 mm,共80个采样点,将最左侧采样点默认为原点。
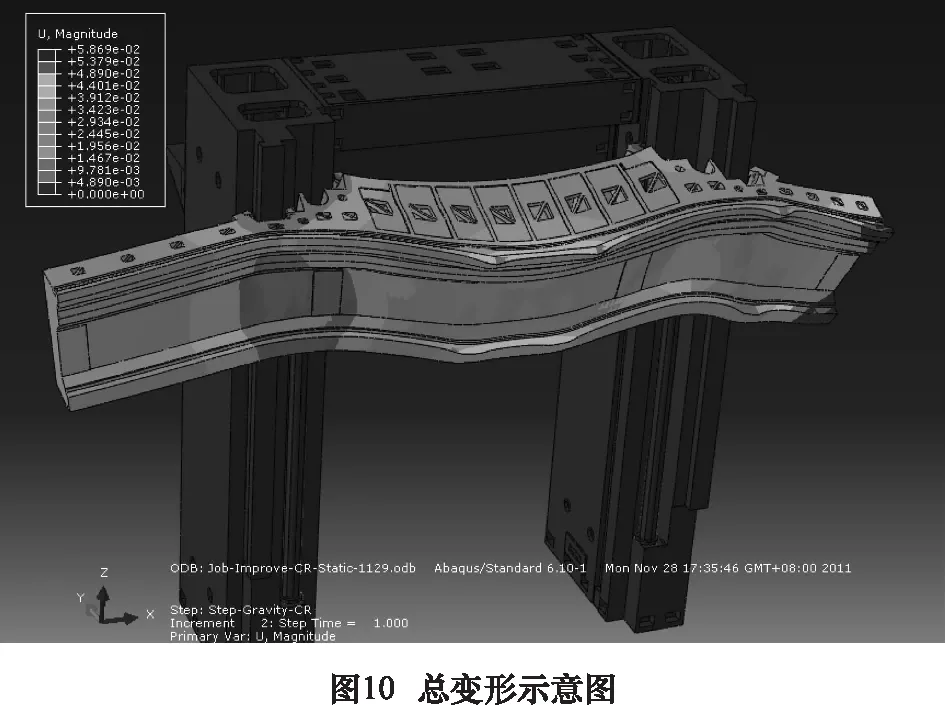
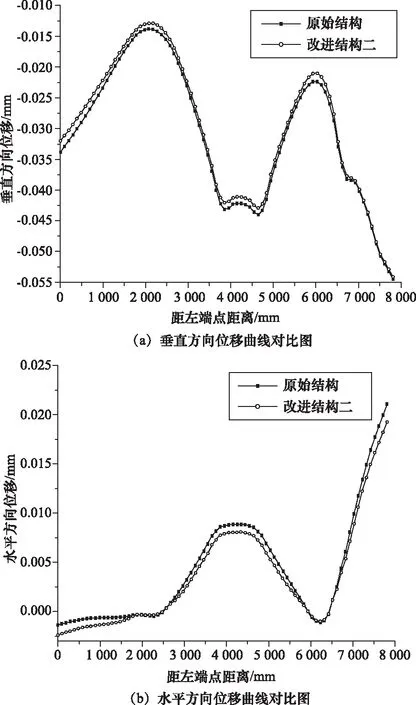
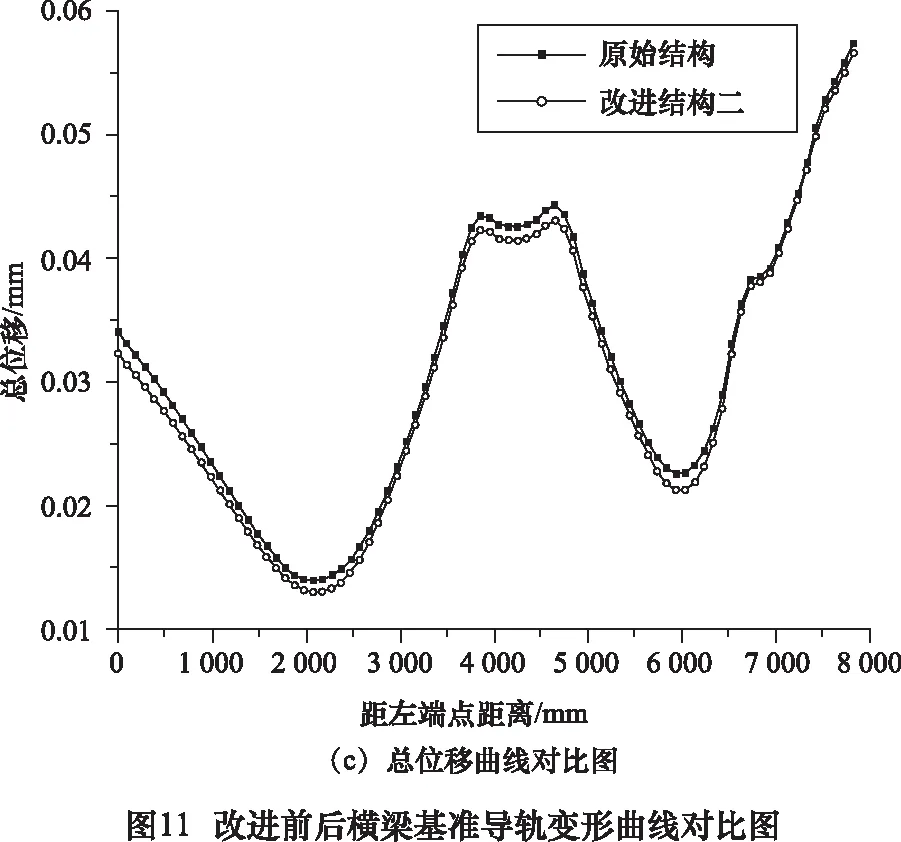
取垂直方向(即图9中的z方向(U3))位移、水平方向(即图9中的y方向(U2))位移以及总位移进行观察。垂直方向(或水平方向)位移指的是采样点变形后z方向(或y方向)坐标值减去变形前z方向(或y方向)坐标值,因此变形量有正负之分;总位移指的是变形前后采样点之间的距离,均为正值。总位移云图如图10所示,3个方向上的变形曲线对比图如图11所示。可以看出:在横梁基准导轨的全部长度内,改进结构二的垂直方向位移绝对值和总位移值均小于原始结构;在横梁基准轨的左端大约2 m长度内,改进结构二的水平方向位移绝对值大于原始结构,其他长度内都小于原始结构。综上所述,在轻量化的基础上,改进后横梁的基准导轨变形量比改进前有所减小,证明了改进方案的合理性。
4 结语
本文针对大型数控龙门导轨磨床的龙门组件,使用有限元软件Abaqus进行了静力学分析和模态分析,得到了活动横梁在卧、立磨头横向拖板作用下的静力变形以及前六阶固有频率和振型。从分析结果可知活动横梁的最大变形出现在承载立磨头的悬臂部位,其次是承载卧磨头的中间部位,主要为弯曲和扭转变形。在不影响外部装配的情况下,本文对活动横梁的内部筋板结构进行了改进,首先根据王莲叶脉的分布规律进行了第一次仿生改进,为了降低结构的复杂性,又依据三角形稳固原理进行了第二次改进。相比于原结构,第二次改进后质量减轻了6.83%,悬臂部位的最大变形量减小了1.62%,中间部位的最大变形量减小低了5.85%,固有频率也有所提高。最后考察了改进前后横梁基准导轨的位移曲线,再次验证了改进结构的静刚度有了明显提高,为实际工程中横梁结构的设计提供了理论依据。
[1]邹雪巍, 刘传金. 浅谈大型数控龙门导轨磨床关键技术及发展趋势[J]. 制造技术与机床, 2012(1): 48-52.
[2] 李再参, 师如华, 郭祥福. 龙门磨床的横梁设计研究[J]. 机电产品开发与创新, 2015, 28(4): 122-123.
[3] 刘献军, 林建中, 商远杰,等. 超精密大尺寸平面磨床横梁结构的有限元分析[J]. 制造业自动化, 2013(21): 137-140.
[4] 马海, 胡亚辉, 郑清春,等. 精密磨床横梁的轻量化设计[J]. 天津理工大学学报, 2012, 28(1): 6-9.
[5] Peng Wen. The structure dynamic optimum design of machine tool column based on sensitivity analysis[J]. Modular Machine Tool & Automatic Manufacturing Technique, 2006 (3): 29-31.
[6] 张森, 杨玉萍, 季彬彬,等. 龙门加工中心横梁组件静动态分析及结构改进[J]. 组合机床与自动化加工技术, 2013(8): 55-57.
[7] 谢飞, 殷鸣, 谭峰,等. 数控龙门平面磨床的动静态性能分析[J]. 机械, 2017, 44(5): 1-5.
[8] 范晋伟, 王鸿亮, 张兰清,等. 数控磨床床身的有限元分析及结构改进[J]. 制造业自动化, 2016, 38(5): 34-47.
[9] 陈桂平, 文桂林, 崔中. 高速磨床床身结构动态分析与优化[J]. 制造技术与机床, 2009 (2): 19-23.
[10] 赵岭, 陈五一, 马建峰. 基于王莲叶脉分布的机床横梁筋板结构仿生优化[J]. 高技术通讯, 2008, 18(8): 806-810.
猜你喜欢
中国介入心脏病学杂志(2022年7期)2022-09-16
哈尔滨轴承(2020年3期)2021-01-26
河北书画研究(2020年1期)2021-01-18
世界最新医学信息文摘(2020年50期)2020-07-14
文苑(2019年24期)2020-01-06
装备制造技术(2019年12期)2019-12-25
制造技术与机床(2019年10期)2019-10-26
制造技术与机床(2017年4期)2017-06-22
棋艺(2016年6期)2016-11-14
中国火炬(2014年8期)2014-07-24
