
系泊系统的研究设计
2018-06-01 10:58彭新清赵聪聪
读与写·下旬刊 2018年4期
彭新清 赵聪聪

摘要:随着近浅海观测网技术的发展,如何突破其传输节点中系泊系统的设计越来越重要。本文重点研究了悬链单线式系泊系统,通过设计锚链的长度、型号和重物球的质量,来确定浮标的吃水深度、游动区域及水声通讯系统中钢桶的倾斜角度使近浅海观测网的传输节点达到最佳工作状态。
关键词:悬链线;matlab;有限微元法;运动方程
中图分类号:G648 文献标识码:B文章编号:1672-1578(2018)12-0001-01
近淺海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成。浮标系统简化为圆柱体。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成,锚链选用无档普通链环。水声通讯系统安装在一个密封圆柱形钢桶内。整个系统要求钢桶的倾斜角度(钢桶与竖直线的夹角)不超过5度,锚链末端与锚的链接处的切线方向与海床的夹角不超过16度。
1.系泊系统的运动状态
把系泊系统的运动状态划分为三个阶段。第一阶段是海面风速为零时,钢管、钢桶、重物球、锚链(多余部分落在海床上)处于竖直状态,依靠系统的浮力克服重力的阶段;第二阶段是在海面风速产生推动载荷的情况下,锚链多余的部分开始释放并不产生反向拉力,钢桶及四节钢管仍处在竖直状态,整个系泊系统以一定加速度沿着风向运动;第三阶段是锚链多余的部分释放完毕,锚链、钢管、钢桶在风力的推动下开始倾斜,当风的推力与系泊系统的拉力达到静态平衡时,可以根据我们建立的各个部件动态受力模型可以得各个部件的倾斜角度,浮标的吃水深度以及根据浮标移动的距离确定以锚在海面的投影点为圆心的游动区域。在分析析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域时,将水深、海水速度、风速三个变量同时考虑,分别建立与钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域的函数关系,并利用matlab 选取有代表性的水深,画出以钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域为目标的三维图像进行表示。
2.建立模型与求解
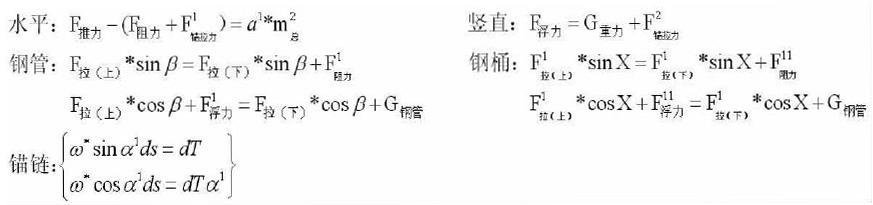
整个运动平衡模型如下:
将已知条件带入系泊系统动态运动平衡模型中,计算出浮标的吃水深度χ和倾斜角度β,钢桶的倾斜角度 ,刻画锚链的形状,锚链末端与锚的链接处的切线方向与海床的夹角α值。
3.结果分析
分析海风风速分别为12m/s和24m/s,选用II型电焊锚链,重物球的质量为1200kg,水深18m,且海水静止时系泊系统的各项参数可知,这两个风速一定程度上可以成为较小风速,使得浮标系统中浮标吃水深度X较小,系泊系统中锚链末端与锚的链接处的切线方向与海床的夹角符合技术要求,水声通讯系统的钢桶与竖直方向的夹角较小满足技术要求。并且通过查阅相关海洋平台以及悬链系统的实际应力实验数据,认为本模型得到的结果具有较好的实际意义。当海风风速v=36m/s时,相同条件下系泊系统的各项参数中浮标吃水深度X较大,系泊系统中锚链末端与锚的链接处的切线方向与海床的夹角α不符合技术要求,水声通讯系统的钢桶与竖直方向的夹角β不满足技术要求。而且此时位于海床上的锚已经被拖行,系泊系统有节点丢失损坏的风险。在考虑部分海域的实测水深介于16m~20m之间,海水速度最大可达1.5m/s、风速最大可达到36m/s这些实际情况时,设三个已知定义域的自变量为h海水深度 、F海浪的推力 和v海风风速 ,通过选择锚链的型号、长度L和重物球的质量重物球m,计算钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域等符合技术要求的值。修改系统运动动态模型,并且增加海浪推力这个变量,得到新的系统运动动态模型。
凭借MATLAB工具强大的循环能力把海水深度h、海浪的推力F和海风风速v,通过选择锚链的型号、长度L和重物球的质量m当做循环变量,计算出钢桶、钢管的倾斜角度、锚链末端与锚的链接处的切线方向与海床的夹角、浮标的吃水深度较小等参数符合技术要求时的锚链型号、长度L和重物球的质量m,这些可行的结果即可用来设计系泊系统的组成。
参考文献:
[1] 司守奎,孙玺著.数学建模算法与应用.北京:国防工业出版社,2013.2.
[2] 童波.半潜式平台系泊系统型式及其动力特性研究,2009.2.
[3] 孙强.基于实测的浮式海洋平台系泊系统分析与评价,2011.6.
