介电弹性体卷形换能器设计与参数优化
2018-05-31 03:17曹建波任钰雪鄂世举夏文俊张海艇朱喜林
农业机械学报 2018年5期
曹建波 任钰雪 鄂世举 夏文俊 张海艇 朱喜林
(浙江师范大学工学院, 金华 321004)
0 引言
介电弹性体(Dielectric elastomer,DE)是一种具有电活性的弹性体材料,能够在电场作用下改变形状,将电能转换为机械能;同样,它的逆过程也可以用于发电,将机械能转换为电能。早在20世纪90年代,很多国内外学者对其变形特性展开了研究,其中美国斯坦福大学是最早对介电弹性体材料进行研究的机构,PELRINE等[1]研制出应变超过100%的介电弹性体材料,在Science上公布之后,引起了驱动领域学者的关注[2-5]。DE作为一种弹性体材料,具有超大变形、高理论比能量密度、高效率、超短反应时间及高疲劳寿命等特点[6-8],很多研究学者认为可将DE材料应用于可再生能源发电及微机电系统等领域。目前在发电领域,介电弹性体发电机(Dielectric elastomer generator,DEG)的能量回收效率是无法与一些技术成熟的发电机[9-13]相比的,但是基于它的特点,它能够应用于海洋能、人体能等特殊能量回收,是一种具有广阔发展前途的能量回收技术[14-18]。
本文设计DE卷形换能器,并利用Neo- Hooken模型建立DE卷形换能器的机电耦合模型[19],基于Matlab/Simulink研究DE卷形换能器的发电特性,以及DE卷形换能器的参数优化(弹簧弹性系数的选择),并通过实验得出DE卷形换能器的最优参数和其发电特性。
1 DE卷形换能器特点及制备
1.1 DE卷形换能器特点
DE卷形换能器对比普通单轴拉伸DE换能器有2个明显特点:①纯剪切模式的拉伸方式。②自身即可实现预拉伸。
DE换能器的发电原理基于可变电容原理,主要过程为[20]:在发电单元的工作过程中,需要给其提供一个外力拉伸。在弹性体发电单元上下表面加电压,电极加载电荷。当外力拉伸DE膜时,面积增大,由于体积不变,DE膜厚度变小,电容增大,两端电压减少;移除外力后,由于DE材料内部的弹性应力,使得DE材料恢复到之前的状态,面积减小,厚度变大,电容减小,两端电压增大,施加的外力机械能转换为电能。其中的外力拉伸模式主要有单轴拉伸、双轴拉伸以及纯剪切。
单轴拉伸,即只在一个方向上施加作用力,如图1a所示,只有X轴方向受到拉力。
双轴拉伸,即DE膜在两个不同的方向进行互相垂直的拉伸,如图1b所示,DE膜在X轴与Y轴方向上受到拉力。
纯剪切[21],按照纯剪切定义,弹性体在变形过程中主应变的方向不随变形的递进而转动,而其它拉伸形式中,主应变方向会随着变形的递进而转动。这种变形模式如图1c所示,约束弹性体的X轴方向变形后,在Y轴方向施加拉力,实现纯剪切模式的拉伸。
依据纯剪切拉伸模式的定义,DE卷形换能器的径向方向由固定块固定DE发电单元,限制DE发电单元的径向变形,在轴向方向施加压力实现变形。因此,DE卷形换能器具有纯剪切拉伸模式这一特点。
另外,DE卷形换能器另一特点就是能够实现自身预拉伸。DE卷形换能器的发电单元是DE膜结合弹簧一起制作的,弹簧会将DE膜拉伸到一定长度,实现DE膜的预拉伸。

图1 3种拉伸方式Fig.1 Three kinds of stretching methods
1.2 DE卷形换能器设计
DE卷形换能器的DE膜采用3M公司的VHB4910丙烯酸膜,丙烯酸膜是DE膜材料的一种。电极材料使用导电膏DS- 001。设计的DE卷形换能器机械结构如图2所示,使用电动推杆实现DE膜的拉伸,其具体实现方式为:将2个固定块通过导杆并固定在弹簧上,将DE膜固定在固定块上,其中一端的固定块与滑块相连,实现拉伸。DE膜黏在固定块上,在拉伸时,DE膜的径向无形变,由此构成纯剪切模式。电动推杆通过连接杆与滑块相连,使用电动推杆实现DE膜的拉伸与收缩。

图2 DE卷形换能器模型示意图Fig.2 Schematic diagram of DE roll transducer model1.电动推杆 2.连接杆 3.导杆 4.滑块 5.直线轴承 6.DE膜 7.弹簧 8.固定块 9.底座

图3 DE卷形换能器发电单元示意图Fig.3 Schematic diagram of generating unit of DE roll transducer
2 DE卷形换能器建模
2.1 力学模型
首先,建立DE卷形换能器的力学模型,图3为DE卷形换能器的发电单元示意图,在Z轴方向施加拉力FZ。
假设DE膜体积不变;DE膜上涂覆的电极材料是连续均匀的,厚度为零,不会增加DE膜的厚度;DE膜变形后的半径为B,长度为Z,厚度为H;DE卷形换能器发电单元初始长度为z0,固定膜的固定块半径为ri,膜的初始厚度为h;λB、λH、λZ分别表示DE膜在径向、厚度、轴向的拉伸率。则有
(1)
如图2所示,DE膜是固定在固定块上的,因此其在径向方向是没有拉伸变形的,即λB=1,根据之前假设的DE膜体积不变,则有λHλZ=1,即
(2)
Neo- Hooken模型是一种描述超弹性体的应力应变关系的理论模型,其应变能函数为
(3)
其中
μ=Y/3
式中W——应变能
λ1、λ2、λ3——介电弹性体3个方向上的相对拉伸变形
μ——剪切模量Y——弹性模量
Z方向上的应变能可表示为
(4)
由于DE膜为不可压缩材料(体积不变),其主应力σ′i可表示为
(5)
式中p——静水压力,主要由动力学边界条件决定
在Z轴方向上的主应力可表示为
(6)
弹簧与DE膜相连可以等效为2个弹簧和1个阻尼器,其等效模型如图4所示。根据牛顿第二定律对Z轴方向进行受力分析,得
(7)
式中k1——弹簧的弹性系数
k2——DE膜等效的弹性系数
dv——等效的阻尼系数

图4 DE卷形换能器等效模型Fig.4 Equivalent model of DE roll transducer
2.2 电学模型

图5 DE卷形换能器外围电路Fig.5 Peripheral circuit of DE roll transducer
外围电路主要由DE卷形换能器、高压偏置电源、负载、储能器件、开关二极管构成,如图5所示。图中,DEG为DE卷形换能器的发电单元,由可变电容表示;U0为外部加的高压偏置电源,为DEG提供偏置电压;Cs为储能电容;D1、D2为开关二极管,目的是限定电流方向,避免回流;R1、R2为负载。
由电工学知识可知
(8)
(9)
为了寻找DE卷形换能器的电压变化情况,进行如下运算
(10)
式中u——DE两端电压
进一步化简后有
(11)
(12)

(13)
又

(14)

图6 仿真模型Fig.6 Simulation model
式中t——时间i——回路中的电流
在DE外围设计了电路来求解i(图5)。由图5可得
(15)
将式(14)和式(15)代入式(13),得
(16)
2.3 机电耦合模型
由式(7)和式(16)共同构成了DE卷形发电机的机电耦合模型为
(17)
3 DE卷形换能器仿真与实验
3.1 DE卷形换能器仿真模型建立及参数设置
根据以上建立的机电耦合模型,使用Matlab/Simulink软件搭建了DE卷形换能器的仿真分析模型,如图6所示。结合实验条件,模型中的具体参数如下:DE膜厚度h=1×10-3m,弹性模量Y=1 MPa,真空介电常数ε0=8.854 187 817×10-12F/m,DE膜介电常数εr=4.7 F/m,电阻R1=8×106Ω,初始电压U0=490 V,DE发电单元质量为0.023 g,固定块周长2πri=0.188 4 m,k1=586 N/m,z0=0.232 m,由于实验测量真实阻尼过小,DE膜的弹性系数也过小,因此dv=0,k2=0。拉力为
(18)
3.2 DE卷形换能器实验平台的建立
根据DE卷形换能器机械结构构建实验平台。DE卷形换能器发电单元如图7a所示,DE卷形换能器实验台如图7b所示。

图7 DE卷形换能器实验装置Fig.7 Experimental device of DE roll transducer1.推杆电动机 2.电容测试仪 3.示波器 4.DE发电单元 5.固定块 6.高压探头 7.电动机控制器 8.电动机电源
3.3 DE卷形换能器发电机理验证及参数优化
(1)DE卷形换能器发电机理验证
根据2.3节建立的DE卷形换能器机电耦合模型及参数进行仿真,其仿真结果如下:
图8为电压随拉伸率的变化曲线,在拉力的作用下 DE卷形换能器被拉长(拉伸率增加),DE卷形换能器发电单元两端电压逐渐降低,这个过程为 DE卷形换能器的充电过程; 当推杆电动机回程时,DE卷形换能器拉伸率减小,DE卷形换能器发电单元两端电压逐渐升高,即为发电过程。在拉伸与收缩的过程中,DE卷形换能器发电单元两端电压存在高于初始电压的现象,验证了其发电机理。
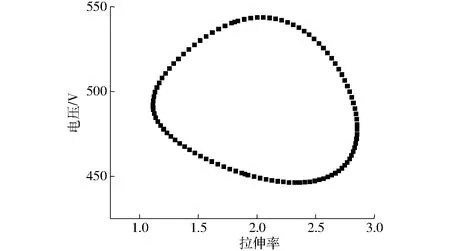
图8 电压与拉伸率的关系曲线Fig.8 Relationship curve between voltage and tensile rate
图9a为仿真时电压随时间的变化曲线,图9b为实验中DE卷形换能器(弹簧k1=586 N/m)的电压随时间的变化曲线,通过对比可以看出其变化趋势是基本一致的。实验曲线的幅值小于仿真曲线的原因:①仿真中忽略了机械损耗、电极内阻损耗、电子元器件损耗等损耗问题。②测量误差。实验曲线与仿真曲线电压变化频率主要是依据拉力的变化周期,由于现实中推杆电动机的拉伸收缩与仿真中拉力的周期不同,因此仿真图与实验图的电压变化频率不同。

图9 电压与时间关系曲线Fig.9 Relationship curves between voltage and time
(2)DE卷形换能器的参数优化
弹簧的弹性系数是影响DE卷形换能器发电性能的一个重要因素。能够依靠自身实现DE膜的预拉伸是DE卷形换能器的一个显著优势,但是如果弹簧的刚度过小,不能够实现DE膜的预拉伸,那么DE卷形换能器中的弹簧就失去了意义,因此,弹簧弹性系数的选择对于DE卷形换能器优化十分重要。
弹簧弹性系数k的选取,与弹簧的制作材料、线径、外径、有效圈数有关,如图10所示,其计算公式为
(19)
其中
D=D1-2d
式中D1——弹簧外径
G——弹簧材料的剪切模量
d——弹簧线径D——弹簧中径
N——弹簧有效圈数
弹簧的材料为钢,其剪切模量G=8×104MPa。
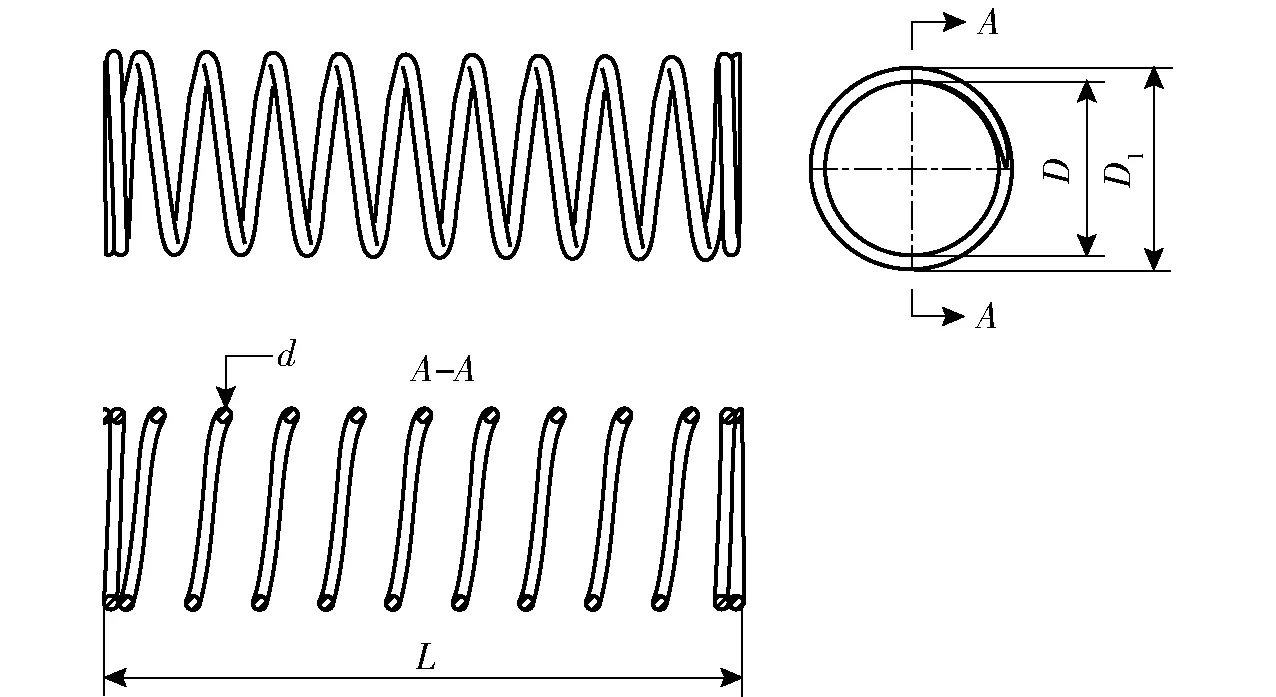
图10 弹簧模型Fig.10 Spring model
本文选取了不同型号的弹簧进行实验,其型号选择如表1所示。
利用不同k的弹簧分别制作了DE卷形换能器的发电单元,其具体参数如表2所示。弹簧初试长度为30 cm,压缩后可达到的最小长度为6 cm,DE膜的初始长度为15 cm。利用DE卷形换能器进行实验时,其压缩发电行程设置为12 cm,电压升高值的实验结果如表2所示,在测量过程中,发现DE卷形换能器的电容与上升电压都是随着预拉伸长度的增加而增加,即随着弹簧的弹性系数k的增大而增大。当k取值为64.16、133.33、191.71 N/m时,DE卷形换能器的初试长度不足够被压缩12 cm,因此其不满足实验测量要求,未做测量。

表1 弹簧参数Tab.1 Spring parameters

表2 DE卷形换能器发电单元参数Tab.2 Parameters of generating unit of DE roll transducer

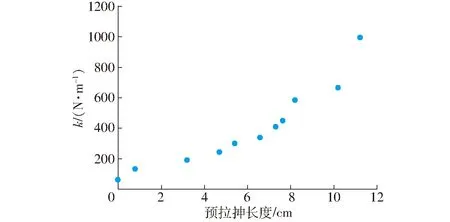
图11 预拉伸长度与k关系Fig.11 Relationship between prestretch length and k
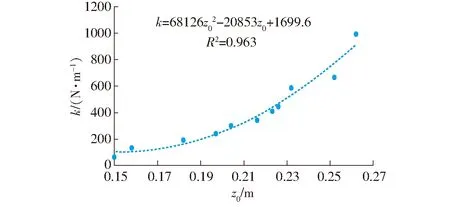
图12 z0 与k的关系曲线Fig.12 Relationship curve between z0 and k
将k值与z0的拟合函数代入仿真模型中,得到k与DE卷形换能器发电单元两端电压的关系,如图13所示,图13a是仿真得出的关系曲线,电压随弹性系数k的增加而增加,一直到弹簧的弹性系数k=1 575.04 N/m时,弹簧可将DE卷形换能器的发电单元弹起到30 cm(与弹簧长度一致),当k>1 575.04 N/m时,DE卷形换能器的初始长度不再改变,但是压缩发电过程所需的外力会增大,因此,DE卷形换能器在k=1 575.04 N/m时达到最佳发电性能。图13b为实验得出的关系曲线,与仿真曲线的趋势一致,即 DE卷形换能器的发电性能随着弹簧弹性系数的增加而增加,分析仿真与实验关系曲线在最高点时趋势的变化,主要是由于在实验过程中,弹簧在实际的实验过程中,实验台所能驱动的最大刚度的弹簧其弹性系数k=991.57 N/m,因此,在实际实验过程中并没有达到仿真中的最佳k值,依据现有的实验条件,DE卷形换能器的弹性系数k的较优选择为991.57 N/m。
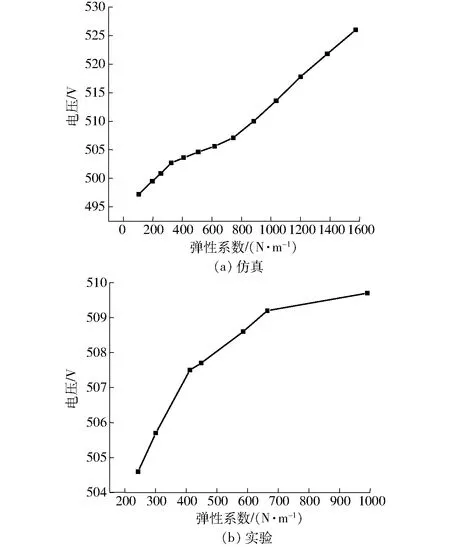
图13 DE电压与弹性系数关系曲线Fig.13 Relationship curve between DE voltage and elastic coefficient
3.4 DE卷形换能器性能测试
性能测试实验是将DE卷形换能器与单轴拉伸的DE膜升高电压进行对比。单轴拉伸实验中使用的DE膜其类型、尺寸以及柔性电极材料都与DE卷形换能器相同,实验中测得其电容为531.2 pF,DE发电单元两端电压上升幅度为11.3 V。将其与弹簧弹性系数为991.57 N/m的DE卷形换能器进行对比,结果如图14所示,DE卷形换能器的发电特性优于单轴拉伸时的发电特性。

图14 DE单轴拉伸与DE卷形换能器发电性能对比Fig.14 Comparison of generation performance of DE uniaxial tension and DE roll transducer
4 结论
(1) DE卷形换能器自身具有预拉伸功能以及纯剪切的拉伸模式,使其发电性能远大于一般单轴拉伸模式的DEG,在同等实验条件下,DE卷形换能器的电容有1.52 nF,端电压达到19.7 V,而单轴拉伸模式的DEG其发电单元的电容仅为531.2 pF,端电压则为11.3 V。
(2) DE卷形换能器仿真分析中,进行参数优化后发现DE卷形换能器弹簧弹性系数的最佳选择为1 575.04 N/m,但实验过程中,由于受实验装置的限制,弹性系数为991.57 N/m时最优。
1 PELRINE R, KORNBLUH R, PEI Q, et al. High-speed electrically actuated elastomers with strain greater than 100% [J]. Science, 2000, 287(5454): 836-839.
2 POTZ M, ARTUSI M, SOLEIMANI M, et al. Rolling dielectric elastomer actuator with bulged cylindrical shape [J]. Smart Materials & Structures, 2010, 19(12): 127001.
3 朱银龙, 张鑫焱, 王华明, 等. 介电型电活性聚合物驱动转动关节控制技术研究[J/OL]. 农业机械学报, 2015,46(7): 333-338.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150747&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.07.047.
ZHU Y L, ZHANG X Y, WANG H M, et al. Research on actuation control of dielectric electroactive polymer rotary joint [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(7): 333-338.(in Chinese)
4 GODABA H, LI J, WANG Y, et al. A soft jellyfish robot driven by a dielectric elastomer actuator [J]. IEEE Robotics & Automation Letters, 2016, 1(2): 624-631.
5 LU Z, SHRESTHA M, LAU G K. Electrically tunable and broader-band sound absorption by using micro-perforated dielectric elastomer actuator [J]. Applied Physics Letters, 2017, 110(18): e1501595-5242.
6 CURTIS M, IHLEFELD, QU Z H. A dielectric electroactive polymer generator-actuator model: modeling, identification and dynamic simulation [C]∥ Proceedings of SPIE,2008, 6927: 1-11.
7 CHIBA S, WAKI M, KOMBLUH R, et al. Extending applications of dielectric elastomer artificial muscle [C]∥ Proceedings of SPIE, 2007,6524: 652424.1-652424.5.
8 LALLART M, COTTINET P J, GUYOMAR D, et al. Electrostrictive polymers for mechanical energy harvesting[J]. SPIE, 2004, 5385(5): 523-535.
9 KANG G, KIM K S, KIM S. Analysis of the efficiency of a dielectric elastomer generator for energy harvesting [J]. Review of Scientific Instruments, 2011, 82(4): 692715.
10 KALTSEIS R, KEPLINGER C, BAUMGARTNER R, et al. Method for measuring energy generation and efficiency of dielectric elastomer generators [J]. Applied Physics Letters, 2011, 99(16): 162904.1-162904.3.
11 ZHOU J, JIANG L, KHAYAT R E. Investigation on the performance of a viscoelastic dielectric elastomer membrane generator [J]. Soft Matter, 2015, 11(15): 2983-2992.
12 BINH P C, NAM D N C, AHN K K. Design and modeling of an innovative wave energy converter using dielectric electro-active polymers generator [J]. International Journal of Precision Engineering & Manufacturing, 2015, 16(8): 1833-1843.
13 WANG H, WANG C, YUAN T. On the energy conversion and efficiency of a dielectric electroactive polymer generator [J]. Applied Physics Letters, 2012, 101(3): 071101.
14 GOUDAR V, REN Z, BROCHU P, et al. Optimizing the output of a human-powered energy harvesting eystem with miniaturization and integrated control[J]. Sensors Journal IEEE, 2014, 14(7): 2084-2091.
15 VERTECHY R, FONTANA M, PAPINI G P R, et al. In-tank tests of a dielectric elastomer generator for wave energy harvesting [C]∥ Proceedings of SPIE, 2014,9056: 90561G1-90561G11.
16 JEANMISTRAL C, VUCONG T, SYLYESTRE A. Energy scavenging strain absorber: application to kinetic dielectric elastomer generator [C]∥ Proceedings of SPIE, 2014,9056: 90561H1-90561H8.
17 KORNBLUH R D, PELRINE R, PRAHLAD H, et al. From boots to buoys: promises and challenges of dielectric elastomer energy harvesting[J]. Proceedings of SPIE-The International Society for Optical Engineering, 2011, 7976(10): 67-93.
18 CHIBA S, WAKI M, WADA T, et al. Consistent ocean wave energy harvesting using electroactive polymer (dielectric elastomer) artificial muscle generators [J]. Applied Energy, 2013, 104(2): 497-502.
19 曹建波, 葛彩军, 鄂世举,等. 基于Neo- Hooken的介电弹性体单轴拉伸发电特性研究[J/OL]. 农业机械学报, 2016, 47(3): 389-394.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160355&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.03.055.
CAO Jianbo, GE Caijun, E Shiju, et al. Power generating characteristics of uniaxial tensile for DEG based on Neo- Hooken model [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3):389-394.(in Chinese)
20 鄂世举,朱喜林,高春甫.介电弹性体发电的基本原理及在分布式发电中的应用[J].现代制造工程, 2009, 23(9):141-145.
E Shiju, ZHU Xilin, GAO Chunfu. The basicmechanism of dielectric elastomer generator and its application in distributed power generation [J]. Modern Manufacturing Engineering, 2009, 23(9): 141-145.(in Chinese)
21 李博. 介电弹性材料驱动器的力电耦合机理及稳定性研究[D]. 西安:西安交通大学, 2012.
LI Bo. Electromechanical coupling and stability in dielectric elastomer actuator[D].Xi’an: Xi’an Jiaotong University,2012.(in Chinese)
猜你喜欢
机械工业标准化与质量(2022年7期)2022-08-12
电加工与模具(2021年1期)2021-02-25
弹性体(2021年6期)2021-02-14
合成树脂及塑料(2021年6期)2021-01-09
环球市场(2020年32期)2020-01-19
微电机(2019年3期)2019-04-28
电子制作(2018年2期)2018-04-18
舰船电子工程(2017年11期)2017-12-25
水下无人系统学报(2017年5期)2017-11-22
雷达与对抗(2015年3期)2015-12-09