基于GNSS农田平整全局路径规划方法与试验
2018-05-31 03:15夏友祥景云鹏
农业机械学报 2018年5期
刘 刚 康 熙 夏友祥 景云鹏
(1.中国农业大学现代精细农业系统集成研究教育部重点实验室, 北京 100083;2.中国农业大学农业部农业信息获取技术重点实验室, 北京 100083)
0 引言
土地平整可以对合理灌溉,节约用水,改善土壤质量,保持土壤肥料,提高劳动生产率等起到重要的作用[1-3]。
全球导航卫星系统 (Global navigation satellite system,GNSS)平地技术是通过GNSS差分定位获取农田地势三维数据,通过计算机处理和设计最佳平整面,根据农田地势的实际高程与设计高程的落差自动精准控制铲车的升降从而实现土地平整[4-5]。GNSS控制平地技术适用于各种地形,具有不受阳光、风力、地势起伏等外界因素影响的优点,可以非常便捷地进行地形测量、设计基准面和土地平整,智能化和自动化程度较高,并且可扩展功能多,有着非常好的工作效率与发展前景[6-7]。
GNSS平地技术已在美国等发达国家得到了应用,包括Trimble公司的FieldLevel Ⅱ、Topcon公司的System 310、麦格集团的GCS900等系统,但其价格昂贵、安装较复杂、对国内农田环境和农用机械适用性较弱,不利于我国产业化推广[8]。目前,我国前期研究的GNSS农田平整系统具有相对完善的功能,中国农业大学精细农业研究中心自2009年开始研发适合国内的GNSS智能化精细平地系统,经过几年的研究,实现了农田地形测量、平面平整、坡面平整、软硬件开发和系统集成。该系统精度高,能满足土地精细平整和灌溉需求[8-10],但还存在对农田信息处理手段单一,在作业过程中缺少路径规划,容易出现铲车空载、满载、漏平和重平等问题,每块农田需要反复几次平整才能达到精度要求,作业效率低。
本文分析GNSS平地系统原理[7],结合农田平整实际要求及作业经验,在改进系统硬件的基础上,对在地形测量后生成遍历农田的路径,指导平地作业,提高平地效率问题进行研究,提出一种基于地势信息的全局路径规划算法,并通过仿真对比试验验证算法的可行性。
1 系统设计
为了提高平地效率,增加拖拉机行走的目的性,根据GNSS精细农田平整的工作原理,结合实际需求,提出系统设计方案,在硬件、方法和软件方面进行改进。系统组成和系统总体框架如图1和图2所示。选择赫斯曼公司生产的MA- 004- 111NA型销轴力传感器对铲车载荷进行实时监控,传感器参数为:额定载荷0~4 t,安全过载150%,供电电压10~30 V DC,输出信号4~20 mA。

图1 系统硬件组成Fig.1 System hardware components1.拖拉机 2.平地铲 3.液压系统 4.智能控制终端 5.移动站 6.移动站电台 7.基站 8.销轴拉力传感器
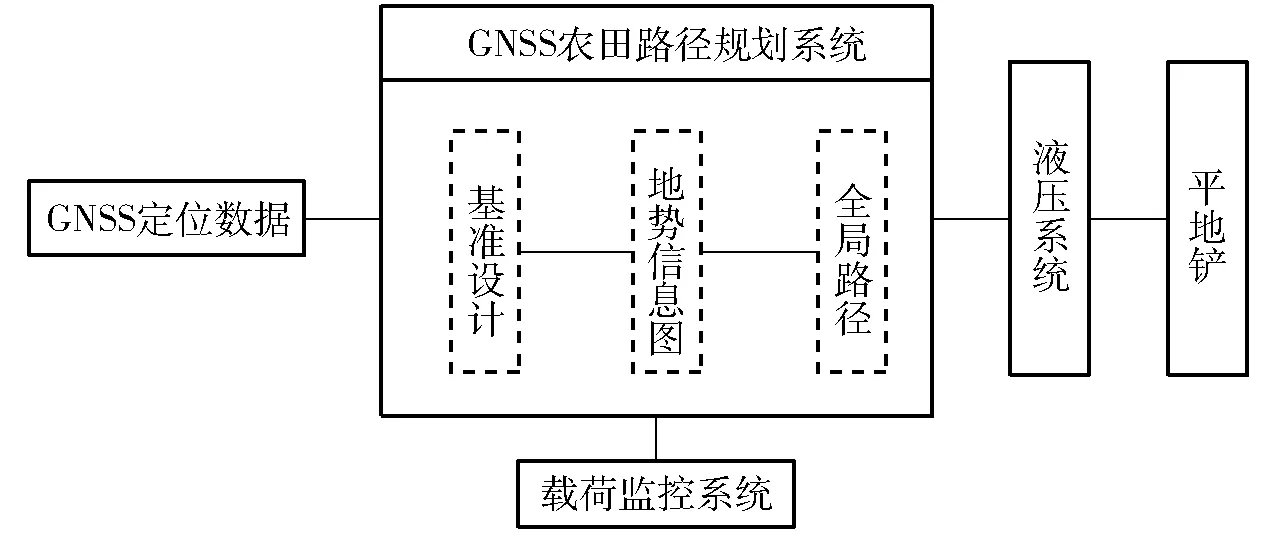
图2 GNSS农田路径规划系统框图Fig.2 Design of GNSS path planning system
2 平地路径规划建模与算法描述
2.1 土地平整路径规划概述
常规的土地平整过程中,拖拉机始终保持直线行驶,到地头进行转向。这种方法操作要求低,线路明确简洁,但是在作业过程中容易出现平地铲空载、满载的情况,铲车空载、满载导致系统处于无土可卸、挖不动土的无效作业状态,在这种状态下拖拉机行驶过的农田地形没有得到改善,由于作业人员无法确定其位置,经常会出现漏平、重平的情况。为达到预期的平整效果,需要进行多次遍历农田的平地作业,极大影响了平地效率。
农田土地平整的路径规划通过地形测量获取农田地势信息,建立农田环境模型,利用路径规划算法分析地形三维数据,生成最有效的、遍历整个农田的路径指导作业。

图3 路径规划流程Fig.3 Flow chart of path planning algorithm
路径规划流程如图3所示:①首先进行农田的地形测量,通过坐标转换、误差处理和插值处理获取农田地势信息。②根据地势信息计算农田基准高程。③生成农田地势信息图,显示每一块区域的挖填土方量,直观地表示农田各个位置的高低程度。④根据地势信息和全局路径规划算法,生成最优路径指导作业。⑤作业过程中,利用拉力传感器反馈铲车载荷,工作人员可以根据规划路径、铲车载荷和地势信息图判断拖拉机行驶方向。
2.2 算法设计与实现
2.2.1环境建模方法
由于农田环境复杂,形状差异较大,拖拉机体积过大,无法灵活移动等原因,现有的环境建模方法无法满足要求,本文将栅格法与模板模型法相结合,建立一种适用于土地平整的农田地势环境建模方法。
农田土地平整的地形测量首先进行边界测量,确定农田形状,人为选取边界上一个位置为原点,拖拉机从原点出发,绕农田一圈回到原点,如图4所示;GNSS测得数据组成边界点显示在地图上反映农田形状。
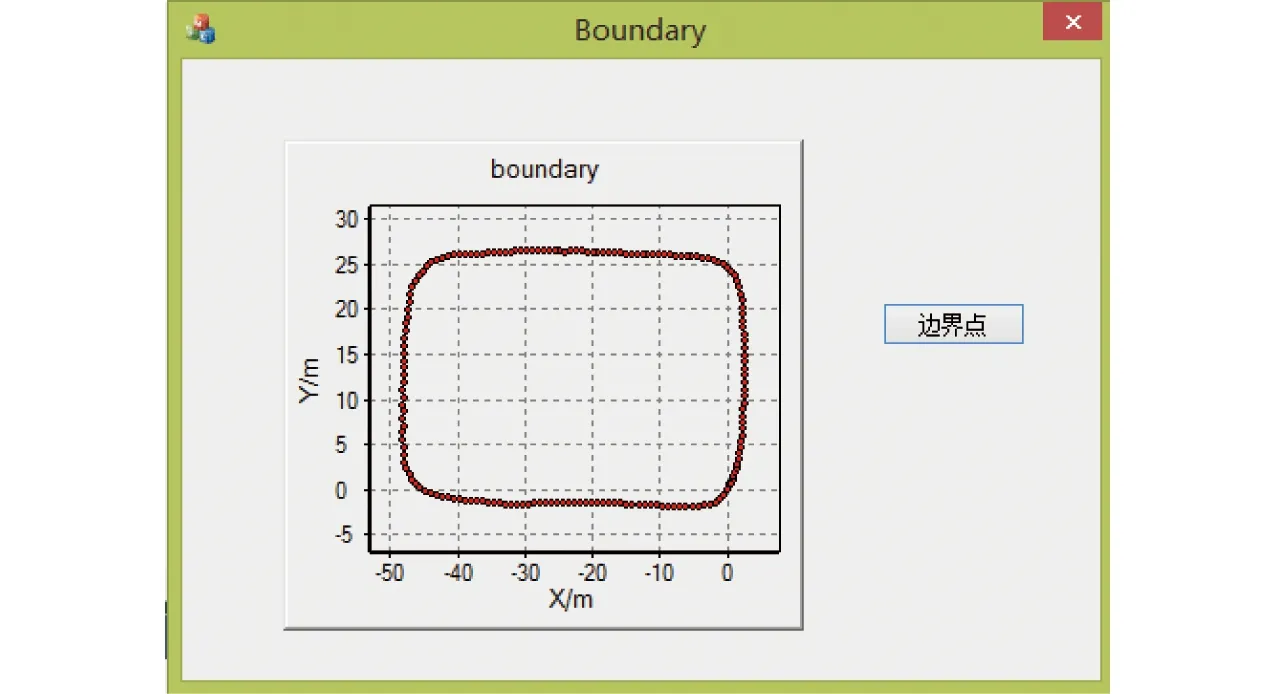
图4 边界测量Fig.4 Boundary measurement
由于GNSS在边界测量过程中收集的数据为拖拉机行驶的位置信息,路线曲折并且四角呈弧形,不满足环境建模标准,本文利用方向包围盒方法(Oriented bounding box, OBB)对边界进行标准化处理[11]。首先确定农田中心点C(xc,yc)的位置
(1)
寻找与C点距离最短的点P(xp,yp),利用lCP确定OBB主轴;生成包围盒如图5所示,即为环境边界。

图5 环境边界Fig.5 Boundary of environment
在生成环境边界后,对内部区域进行单元格划分,并预留两侧区域为转弯地头。由于拖拉机不同于普通机器人,灵活度不高,并且在平地过程中,应尽量保持直线行驶,普通栅格并不适用。本文将单元格设定为长方形,借鉴常规土地平整方法,即保证拖拉机的直线行驶,在特定情况转向,减少操作难度,如图6所示。
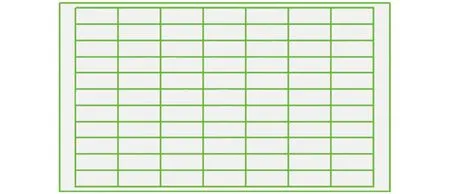
图6 单元格划分Fig.6 Cell division
由于地块大小不统一,如先确定单元格长Lb,可能出现剩余地头区域极大或极小的情况,所以先确定地头长La为平地铲宽度r,既保证铲车对区域的全覆盖,又给拖拉机转向留有足够空间。将两侧地头内部区域分成单元格,其中单元格的宽度d与La相同,为平地铲宽度r,保证铲车在单元格内挖填土无剩余区域;由于GNSS农田平整系统用于精细平整,农田最大高度差Sd在10 cm以下[12-15],为保证铲车在一个单元格内不空载、满载,根据平地铲规格(表1)。由计算土方量的公式可得
(2)

表1 旱田平地铲主要参数Tab.1 Parameters of upland field shovel
此单元格设定的意义在于保证拖拉机在其中直线行驶,即Lb不能太小。首先求出一行单元格个数p及余数q,再计算出单元格长Lb,保证6 m≤Lb≤7 m,即
(3)
(4)
式中L——环境边界长
2.2.2路径规划算法
路径规划旨在于在地图中生成一条遍历整个农田的作业路径,在环境建模基础上生成地势信息图;通过整体地势判断,确定路径走向,在生成过程中根据特定原则进行局部调整;遍历后更新地势信息图,针对由空载、满载造成的未完全平整单元格进行二次规划平整,达到不漏平、重平,提高平整效率的效果[16-19]。算法流程图如图7所示。
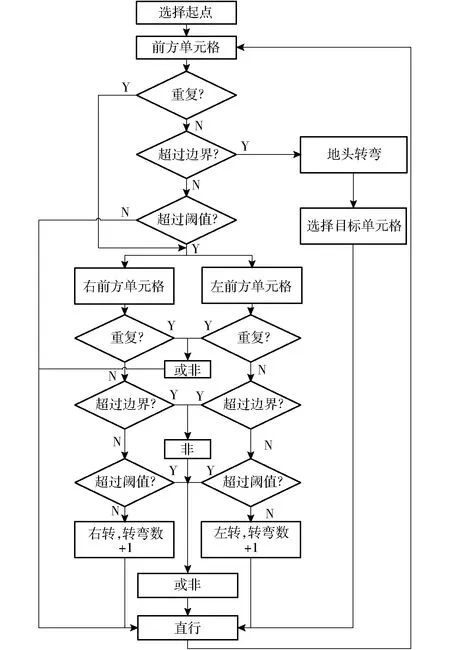
图7 算法流程图Fig.7 Flow chart of algorithm
算法具体实现步骤如下:
(1)标定单元格
地形测量后,通过误差处理剔除极点,计算基准高程Hav,并根据边界测量点生成标准化农田地形;将测得高程数据根据位置映射到单元格中,求出每个单元格内高程点的均值以表示单元格的平均高程,即
(5)
式中H1、H2、…、Hn——单元格内各点高程
通过比较单元格平均高程与基准高程,得到其高、低程度并计算其挖填土方量Vij为
Vij=2.5Lb(Hav-Hij)
(6)
本文通过系统中地形测量功能于中国农业大学上庄实验站收集的真实农田数据,利用算法生成地势信息图,如图8所示。
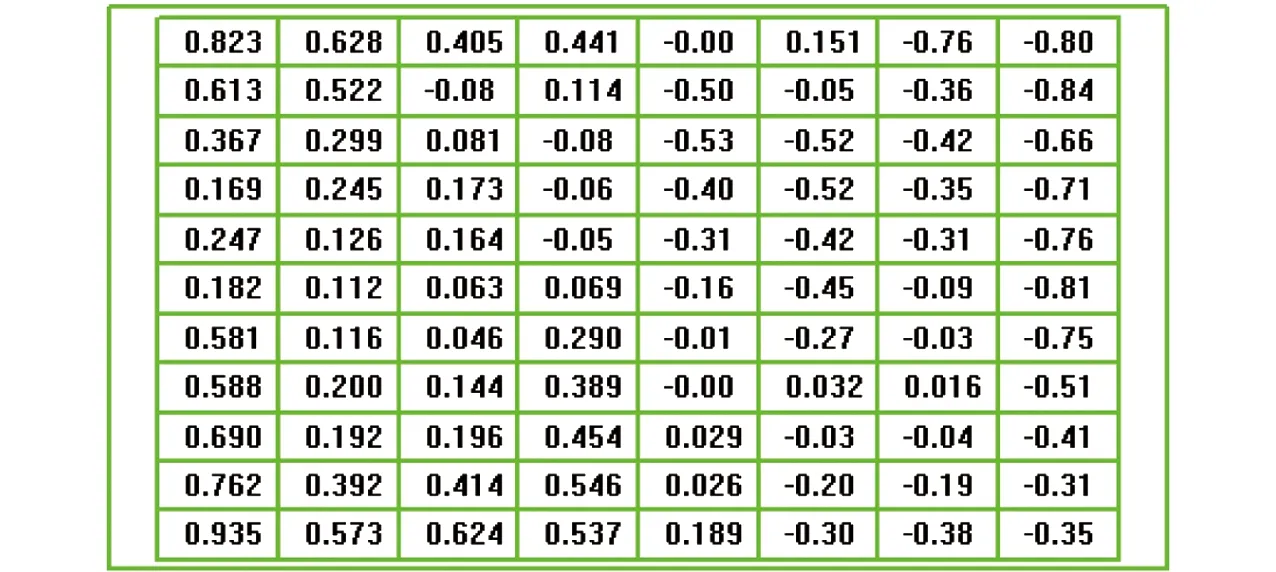
图8 地势信息图Fig.8 Dialog of terrain information
(2)地势分析
将农田纵向均分为二,分别计算总挖填土方量,判断地势高低;计算每一行单元格挖填土方量,用V1,V2,…,Vn表示;规定拖拉机在地势高侧地头转向时,其目标行挖填土方量与当前载荷量之和最小,且大于0;拖拉机在地势低侧地头转向时,其目标行挖填土方量与当前载荷量之和最大,且小于1.7 m3。
(3)路径生成
路径生成的基本原则为:在保证铲车不空载、满载的情况下,保持直线行驶,拖拉机的目标点为其所在单元格左前、前和右前3个单元格。首先计算V1,V2,…,Vn绝对值,从小到大判断每一行两端单元格中土方量较大且大于0的单元格为路径起始点,开始生成路径。生成标准为:通过计算铲车内当前土方量与目标单元格土方量之和,预测铲车状态,设定空载、满载阈值,铲车内土方量在2个阈值范围内,则视为有效作业,即
V0≤Vh≤Vs
(7)
式中V0——空载阈值,为0
Vs——满载阈值,为1.7 m3
①首先计算铲车内土方量与前方单元格土方量之和Vh,如果在阈值范围之内,说明拖拉机直行过下一个单元格铲车始终保持有效作业状态,生成直行路径,更新铲车内土方量为Vh,更新前方单元格土方量为0,对左右两侧单元格不予考虑。
②如铲车内土方量与前方单元格土方量之和超出阈值范围,分别计算其与左前、右前单元格土方量之和,如果都不在范围之内,则说明拖拉机转向不能避免空载、满载,则继续保持直行至前方单元格,更新铲车内土方量为V0或Vs,前方单元格土方量减少V0-Vh或Vs-Vh。
③如果计算铲车内土方量与左前、右前单元格土方量之和的其一在阈值范围内,则说明拖拉机只有转向才能进行有效平整,则生成转向路径,更新铲车内土方量为Vh,更新前方单元格土方量为0。
④如左前、右前均满足条件,则同时生成2条路径,说明两侧均能进行有效平整,并且路径一分为二同时继续生成路径。
⑤路径生成至地头位置,按照地势分析中地头转向原则选取目标单元格继续生成路径。
⑥所有路径遍历整个农田后,由转弯计数器记录每种路径的转弯数量,选择转弯数量最少的路径为最终生成路径。
(4)二次平整路径生成
由于农田地势情况复杂,常规土地平整需要多次遍历农田作业才能达到目标平整度。通过生成路径平整后仍可能出现少数空载、满载情况,本方法在一次遍历作业后更新地势信息图,标记空载、满载单元格,显示单元格挖填土方量,并以避免空载、满载及路径最短为原则,生成二次平整路径,确保土地完全平整,提高平整效率。
3 仿真对比试验
为验证本文提出的基于GNSS农田平整的全局路径规划算法的可行性,在中国农业大学上庄实验站,选取2块大小、地势不同的试验田,设定为农田1、农田2,收集真实地形数据,对其分别进行对比仿真试验,在地势信息图上生成路线示意图,对比规划路径与2种常规路径在一次遍历后的空载、满载情况以及剩余挖填土方量,计算完全平整效率,对本方法效果进行判断。仿真生成路径以农田1为例。
3.1 一次遍历试验
一次遍历试验路径生成如图9~11所示。
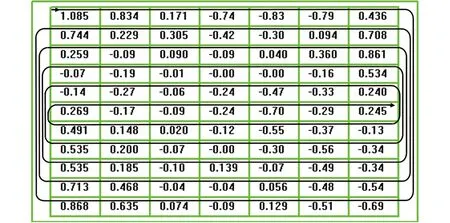
图9 农田1常规螺旋形Fig.9 Conventional spiral of No.1 farmland
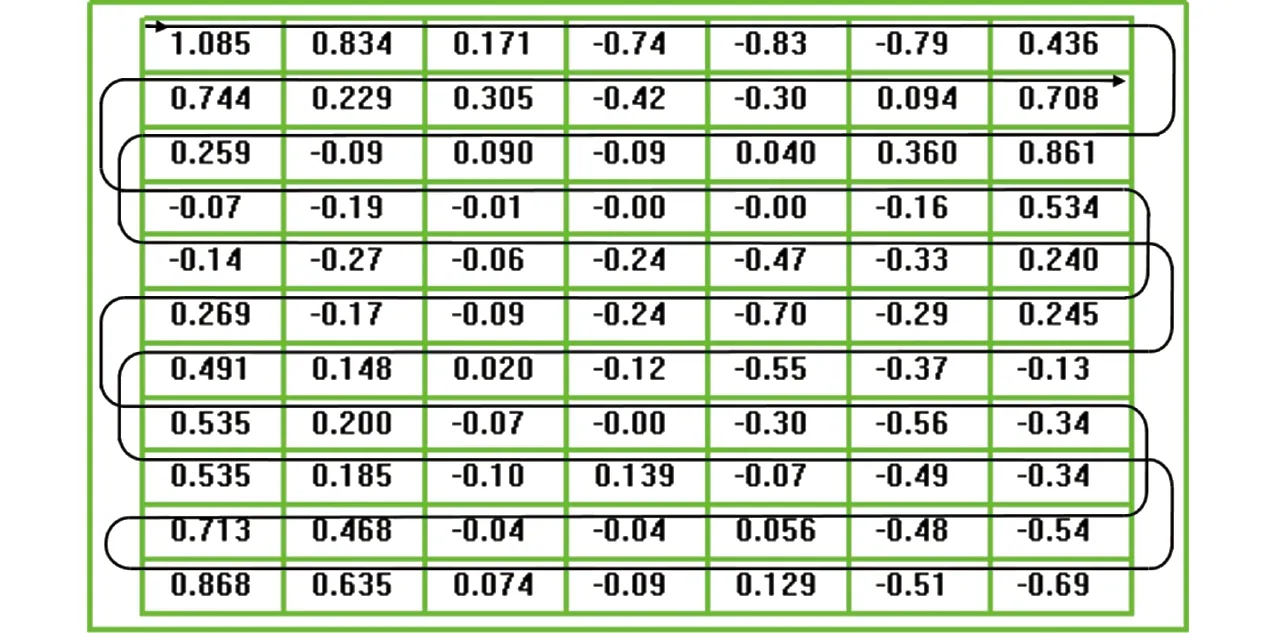
图10 农田1常规蛇形Fig.10 Conventional serpentine of No.1 farmland
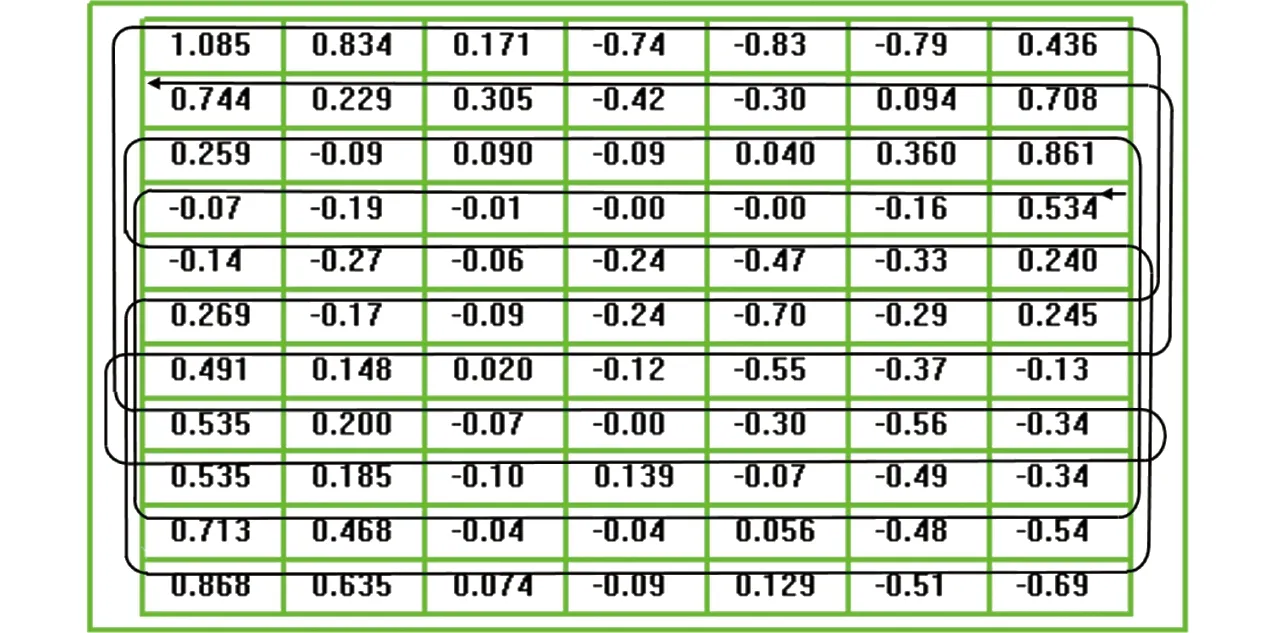
图11 农田1规划路径Fig.11 Path planning of No.1 farmland
一次遍历后地势信息与三维地形如图12~14所示。
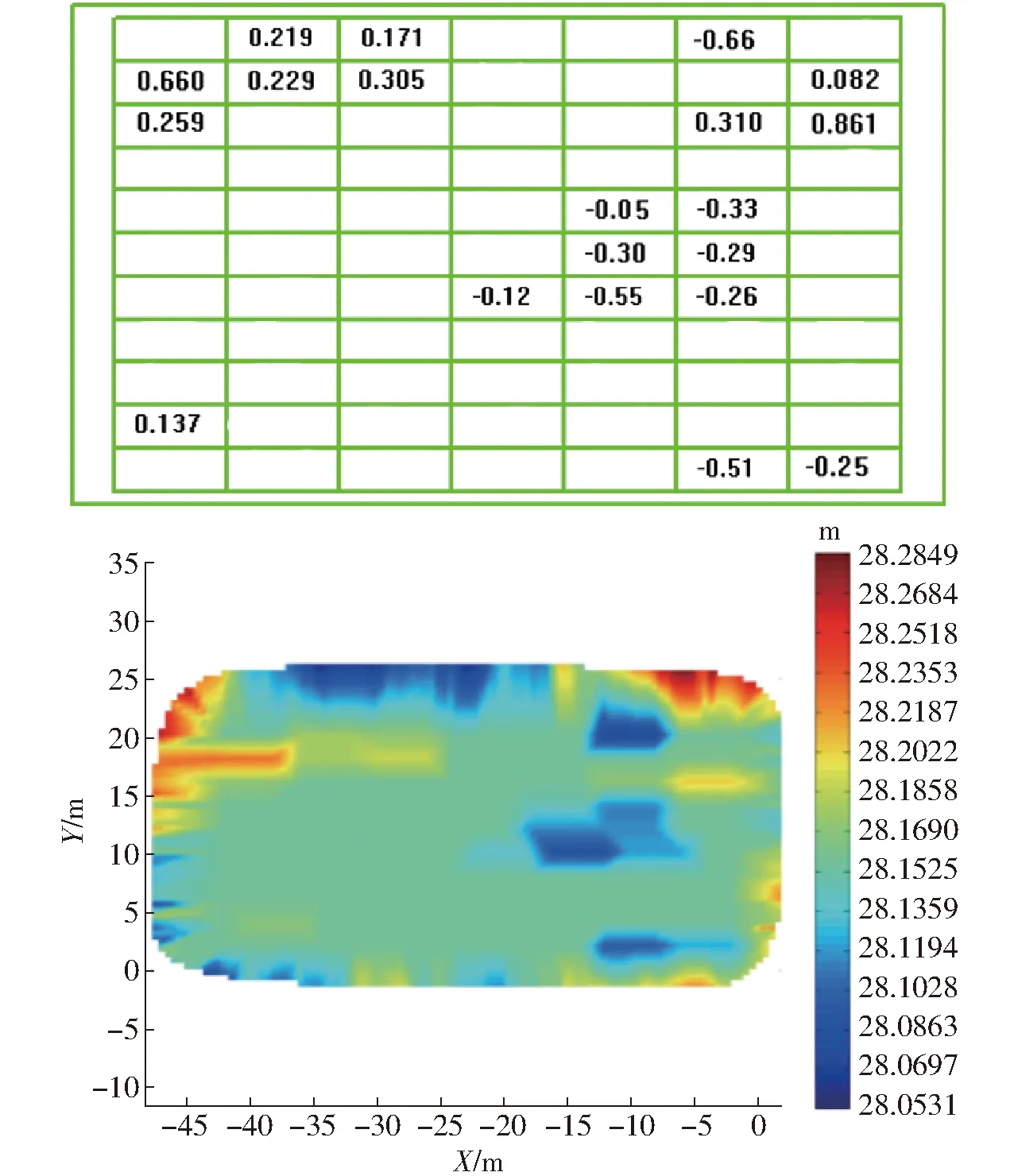
图12 农田1常规螺旋形地形图Fig.12 Conventional spiral topographic map of No.1 farmland

图13 农田1常规蛇形地形图Fig.13 Conventional serpentine topographic map of No.1 farmland
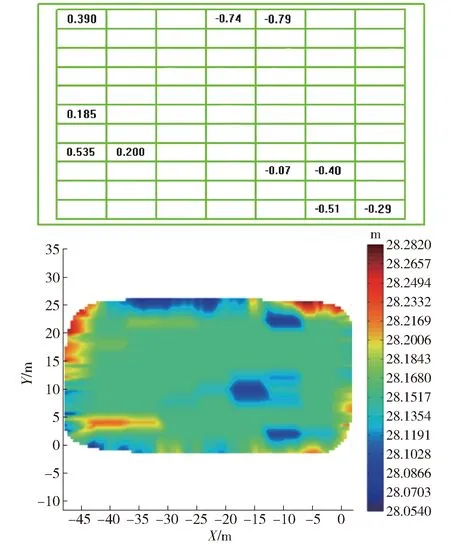
图14 农田1规划路径地形图Fig.14 Path planning topographic map of No.1 farmland
3.2 完全平整试验
经过一次遍历后,农田地势有明显改善,但由于在过程中有无效作业情况,一些单元格地势没有改变,需要继续平整直至所有单元格挖填土方量为0。
农田1利用常规螺旋形路径经过3次遍历达到完全平整,共经过240个单元格;利用常规蛇形路径经过2次遍历达到完全平整,共经过191个单元格;规划路径共经过100个单元格。农田2利用常规螺旋形路径经过2次遍历达到完全平整,共经过126个单元格;利用常规蛇形路径经过2次遍历达到完全平整,共经过181个单元格;规划路径共经过84个单元格。农田1规划路径如图15所示。

图15 农田1完全平整规划路径Fig.15 Planning level path of No.1 farmland
3.3 试验结果与分析
试验以真实农田数据为基础,利用本文算法生成作业路径,仿真规划路径与2种常规路径在相同地块平整过程,通过地势信息图变化,计算得到一次遍历后空载、满载率,挖填土方量和完全平整效率,如表2、3所示。
2块农田由于大小、地势不同,利用相同路径方法得到的结果不同,由表2可知,常规螺旋形和常规蛇形路径空载、满载率在20%以上,完全平整效率不超过41%,规划路径一次遍历后空载、满载率仅为11%,完全平整效率为77%;由表3可知,常规蛇形路径效果一般,一次遍历空载、满载率为46%,说明有效作业仅达到50%左右,完全平整效率为34.6%,常规螺旋形路径效果稍好,有73%的有效作业率及50%的完全平整效率,规划路径有效作业率达到86%,完全平整率达到75%。
由试验可知,常规平整方法由于路径固定,对于不同地势分布农田效果一般且波动较大,容易出现空载、满载现象,达到预期效果需要多次平整,完全平整效率低;相对于常规方法,本文提出的路径规划方法可以减少无效作业时间,不受农田地形影响,提高平整效率。
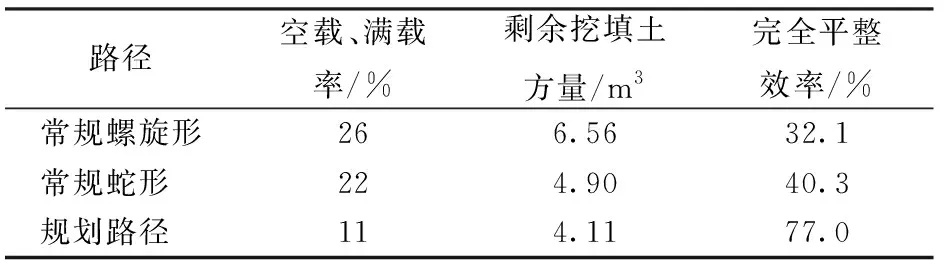
表2 农田1对比结果Tab.2 Compared results of No.1 farmland
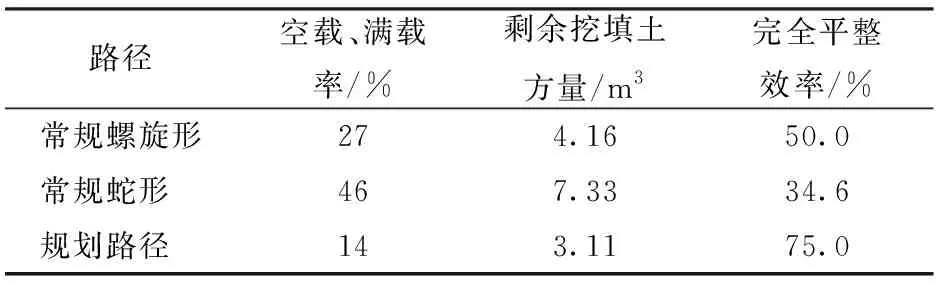
表3 农田2对比结果Tab.3 Compared results of No.2 farmland
4 结论
(1)在GNSS精细土地平整集成系统基础上增加了铲车载荷监控系统,实时获取载荷信息,便于工作人员了解铲车状态,作业过程中可及时进行局部调整。
(2)提出了一种适用于农田土地平整的环境建模方法,根据地形测量信息,利用OBB包围盒方法规范农田边界,利用特定算法对农田内部单元格化。通过对GNSS信号的处理,生成地势信息图,显示每一个区域的挖填土方量,直观地反映了农田的地势分布情况,结合铲车载荷监控系统,预测铲车状态,避免空载、满载情况发生。
(3)提出了一种可以遍历整个农田的路径规划算法,利用真实地形数据进行了仿真对比试验,与两种常规GNSS平整作业路径相比,提出的路径规划算法铲车空载、超载率最小,一次平整后剩余挖填土方量最少,完全平整效率大幅度提高。综合分析表明,该算法可满足土地精细平整与灌溉要求,提高了平地效率。
1 陈岩, 乔雪丹. 关于城市水资源高效利用问题的探讨[C]∥经济生活——2012商会经济研讨会,2012.
2 朱勇. 浅谈节水灌溉技术[J]. 技术与市场, 2011, 18(9):33.
3 吕庆飞. 激光控制平地系统的改进设计与试验研究[D]. 北京:中国农业大学, 2007.
LÜ Qingfei. Design and experimental study of improved laser control leveling system[D]. Beijing: China Agricultural University, 2007. (in Chinese)
4 李益农, 许迪, 李福祥. 田面平整精度对畦灌性能和作物产量影响的试验研究[J]. 农业工程学报, 2001, 17(4): 43-48.
LI Yinong, XU Di, LI Fuxiang. Study on influences of field leveling precision on border irrigation quality and crop yield [J]. Transactions of the CSAE, 2001, 17(4): 43-48. (in Chinese)
5 白岗栓, 杜社妮, 于健, 等. 激光平地改善土壤水盐分布并提高春小麦产量[J]. 农业工程学报, 2013, 29(8): 125-134.
BAI Gangshuan, DU Sheni, YU Jian, et al.Laser land leveling improve distribution of soil moisture and soil salinity and enhance spring wheat yield[J]. Transactions of the CSAE, 2013, 29(8): 125-134. (in Chinese)
6 刘刚, 司永胜, 林建涵, 等. 激光平地控制器的开发与农田试验分析[C]∥2005年中国农业工程学会学术年会论文集,2005.
7 李笑, 李宏鹏, 牛东岭, 等. 基于全球导航卫星系统的智能化精细平地系统优化与试验[J]. 农业工程学报, 2015, 31(3): 48-55.
LI Xiao, LI Hongpeng, NIU Dongling, et al. Optimization of GNSS-controlled land leveling system and related experiments [J]. Transactions of the CSAE, 2015, 31(3): 48-55. (in Chinese)
8 NEMENYI M, MESTERHAZI P A, PECZE Z, et al.The role of GIS and GPS in precision farming[J].Computers and Electronics in Agriculture, 2003, 40: 45-55.
9 李益农, 许迪, 李福祥, 等. GPS在农田土地平整地形测量中应用的初步研究[J]. 农业工程学报, 2005, 21(1): 66-70.
LI Yinong, XU Di, LI Fuxiang, et al. Application of GPS technology in agricultural land levelling survey [J]. Transactions of the CSAE, 2005, 21(1): 66-70. (in Chinese)
10 孟志军, 付卫强, 刘卉, 等. 面向土地精细平整的车载三维地形测量系统设计与实现[J]. 农业工程学报, 2009, 25(2): 255-258.
MENG Zhijun, FU Weiqiang, LIU Hui, et al. Design and implementation of 3D top graphic surveying system in vehicle for field precision leveling [J]. Transactions of the CSAE, 2009, 25(2): 255-258. (in Chinese)
11 吴强. 基于OBB碰撞检测及其算法改进研究[D].郑州:郑州大学,2007.
12 许迪, 李益农, 刘刚.激光控制农田土地精细平整应用技术体系研究进展[J].农业工程学报,2007,23(3):267-272.
XU Di, LI Yinong, LIU Gang. Research progress on the application system of laser-controlled precision land leveling technology[J]. Transactions of the CSAE, 2007,23(3):267-272.(in Chinese)
13 袁本银. 北斗系统对GNSS用户终端产业的机遇和挑战[J]. 交通标准化, 2012(8): 12-13.
14 王泷, 刘刚, 刘寅, 等. 基于GPS的农田坡面平整技术与试验[J]. 排灌机械工程学报, 2013, 31(5): 456-460.
WANG Long, LIU Gang, LIU Yin, et al. GPS-based land slope leveling technique and its implementation [J]. Journal of Drainage and Irrigation Machinery Engineering, 2013, 31(5): 456-460. (in Chinese)
15 刘寅, 李宏鹏, 刘刚, 等. 基于GPS控制技术的土地平整系统[J]. 农机化研究, 2014, 36(9): 142-146
LIU Yin, LI Hongpeng, LIU Gang, et al. Land leveling system based on GPS techniques [J]. Agricultural Mechanization Research, 2014, 36(9): 142-146.(in Chinese)
16 李建平, 林妙玲. 自动导航技术在农业工程中的应用研究进展[J]. 农业工程学报, 2006, 22(9): 232-236.
LI Jianping, LIN Miaoling. Research progress of automatic guidance technologies applied in agricultural engineering [J]. Transactions of the CSAE, 2006, 22(9): 232-236. (in Chinese)
17 李赫. 基于GPS平地的路径规划方法的研究[D]. 保定:河北农业大学, 2013.
LI He. Research on the route planning method of land leveling based on GPS [D]. Baoding: Agricultural University of Hebei, 2013. (in Chinese)
18 王岩, 李宏鹏, 牛东岭, 等. GNSS平地作业路径实时规划与导航方法研究[J]. 农业机械学报, 2014, 45(增刊): 271-275.
WANG Yan, LI Hongpeng, NIU Dongling, et al. Real-time path planning and navigation in GNSS-controlled land leveling [J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(Supp.): 271-275. (in Chinese)
19 刘向锋. 面向GPS导航拖拉机的最优全局覆盖路径规划研究[D].阜新:辽宁工程技术大学,2011.
LIU Xiangfeng. Research on optimal global path planning for complete coverage with GPS guidance on tractor[D]. Fuxin: Liaoning Technology University, 2011. (in Chinese)
20 张月. 清洁机器人全覆盖路径规划研究[D].重庆:重庆大学,2015.
ZHANG Yue. Research on the complete coverage path planning of cleaning robot[D]. Chongqing: Chongqing University, 2015. (in Chinese)
21 陈逸怀,朱博. 基于单元分解法的移动机器人遍历路径规划[J]. 装备制造技术, 2014(4):148-149,152.
22 CHOEST H, NAHATANI K, RIZZI A. Sensor based planning: using a honing strategy and local map method to implement the generalized Voronoi graph[J]. Intelligent Systems & Advanced Manufacturing, 1998,3210:72-83.
23 BORENSTEIN J, KOREN Y. Real-time obstacle avoidance for fast mobile robots[J]. IEEE Transactions on Systems, Man, and Cybernetics, 1989, 19(5): 1179-1187.
24 王增刚. GIS在高标准基本农田建设中的应用研究[D]. 南昌:江西农业大学, 2013.
WANG Zenggang. GIS application of high standards in the construction of basic farmland[D]. Nanchang: Jiangxi Agricultural University, 2013. (in Chinese)
25 杨建潮. 测量误差及粗大误差的判别与消除[J]. 计量与测试技术,2006, 33(11): 4-5.
26 谢德胜, 徐友春, 万剑,等. 基于RTK- GPS的轮式移动机器人轨迹跟随控制[J]. 机器人, 2017, 39(2):221-229.
XIE Desheng, XU Youchun, WANG Jian, et al. Trajectory tracking control of wheeled mobile robots based on RTK- GPS [J]. Robot, 2017, 39(2):221-229. (in Chinese)
27 王仲民, 井平安, 朱博. 基于神经元激励的移动机器人遍历路径规划[J]. 控制工程, 2017, 24(2):283-286.
WANG Zhongmin, JING Ping’an, ZHU Bo. Coverage path planning of mobile robot based on neuronal excitation [J]. Control Engineering of China, 2017, 24(2):283-286. (in Chinese)
猜你喜欢
电脑爱好者(2021年12期)2021-06-22
黄河之声(2021年6期)2021-06-18
电脑爱好者(2021年8期)2021-04-21
奇闻怪事(2020年8期)2020-09-10
数学大王·趣味逻辑(2020年6期)2020-06-22
数学大王·趣味逻辑(2020年5期)2020-06-19
当代工人(2018年21期)2018-03-06
文学港(2018年1期)2018-01-25
三联生活周刊(2017年32期)2017-08-11
广西文学(2016年11期)2016-11-26