卵形-全正圆齿轮行星系变速扎穴机构设计与试验
2018-05-31 03:15王金武周文琪冯金龙江东璇王金峰
农业机械学报 2018年5期
王金武 周文琪 李 鑫 冯金龙 江东璇 王金峰
(1.东北农业大学工程学院, 哈尔滨 150030; 2.黑龙江八一农垦大学工程学院, 大庆 163319)
0 引言
液态肥以生产费用低、施肥方便、吸收快、用肥省、改善农业产品品质等诸多优点在国内外已得到较为广泛的应用[1-4]。液肥深施技术是将液肥集中施于土壤耕作层的作物根系附近,利于加快作物对液肥的吸收,提高作物产量和质量[5]。
文献[6-7]采用曲柄滑块机构作为深施液肥装置的驱动部件。该装置采用“杆机构”运动形式,可实现单个注射针在入出土过程中保证垂直姿态深施肥。但由于“杆机构”的固有运动特性,机具工作效率、振动大,难以实现在高速下,喷肥针兼具垂直姿态扎穴与穴口小的目标。
现阶段,国内扎穴机构主要采用非圆齿轮行星系驱动喷肥针进行扎穴。如固装单臂喷肥针的椭圆- 正圆齿轮行星系扎穴机构,虽然经过运动学和动力学优化,但驱动轮系仍不能满足喷肥针入出土垂直姿态要求且工作效率低,难以实现高速扎穴性能。固装双臂喷肥针的全椭圆齿轮行星系扎穴机构、采用二级传动的非圆齿轮行星轮系扎穴机构[8-11]以及最新设计的变形椭圆齿轮式与“斜置式”扎穴机构[12-14],皆采用双喷肥针结构实现旋转交替扎穴方式,虽然满足高速扎穴,但该种机构利用参数正求与反求方法进行设计,并运用人机交互方式对机构进行反复优化,但也不能获得喷肥针垂直姿态入出土的目标。
针对上述问题,本文根据全正圆齿轮行星系的啮合原理,首先满足喷肥针时刻垂直运动姿态,其次结合卵形齿轮啮合运动规律,实现喷肥针变速扎穴的新型方式,实现喷肥针在入出土过程中达到小穴口的目标。基于此种思路,设计卵形- 全正圆齿轮行星系变速扎穴机构,并探索该机构的工作机理,建立机构的数学模型,利用仿真软件进行虚拟试验,最终通过试验进行机构性能的验证。
1 卵形- 全正圆齿轮行星系变速扎穴机构结构与原理
卵形- 全正圆齿轮行星系变速扎穴机构主要由5个全等的正圆齿轮、2个卵形齿轮、驱动壳体、法兰、摇臂、喷肥针等部分组成,如图1a所示。5个正圆齿轮等序排列装配在驱动壳体内腔里面(此时驱动壳体初始安装位置垂直于地面),法兰穿透驱动壳体并与内腔里面的太阳轮固结,且静止不动,驱动壳体可围绕法兰旋转中心作旋转运动,如图1b所示。摇臂与喷肥针的固装体分别安装在上、下行星轮的轴心线上,摇臂初始安装角度需满足喷肥针垂直地面。2个卵形齿轮互相啮合,其中从动卵形齿轮与驱动壳体固结。
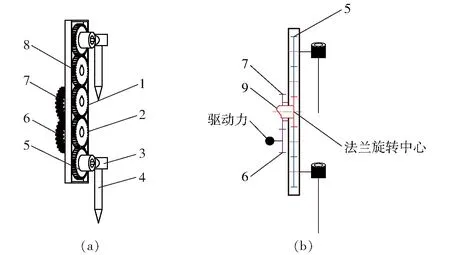
图1 扎穴机构组成与原理图Fig.1 Diagrams of composition and principle of pricking hole mechanism1.太阳轮 2.中间轮 3.摇臂 4.喷肥针 5.行星轮 6.主动卵形齿轮 7.从动卵形齿轮 8.驱动壳体 9.法兰
工作时,主动卵形齿轮在驱动力下带动从动卵形齿轮,由此动力传递到驱动壳体上,由于卵形齿轮实现非匀速传动特性,使驱动壳体围绕法兰旋转中心作变速转动,驱动壳体带动全正圆齿轮行星系进行啮合运动。此时,中间轮围绕太阳轮公转且自转,行星轮与中间轮相互啮合,所以同理可知,行星轮围绕太阳轮公转且自转。由于行星轮与摇臂、喷肥针固结,最终动力传递给喷肥针,使其满足喷肥针始终保持垂直姿态且围绕法兰旋转中心作圆周运动。在驱动壳体的变速运动下,根据机构的前进速度,满足喷肥针在入出土过程中水平绝对速度趋近于零的特性要求,达到穴口小的目标,最终完成变速垂直扎穴。
2 卵形- 全正圆齿轮行星系变速扎穴机构模型
2.1 全正圆齿轮行星系传动机理
全正圆齿轮行星系可实现喷肥针垂直姿态入出土运动特性要求,其结构简图如图2所示。
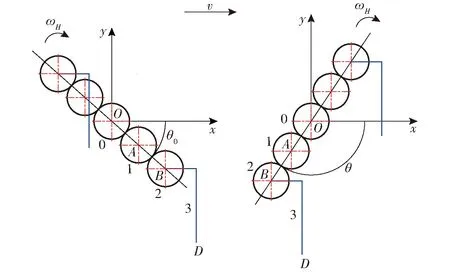
图2 全正圆齿轮行星系机构简图Fig.2 Mechanism diagram of all circular gear planetary system
建立机构模型直角坐标系,其转动中心位于坐标原点O,则
(1)
ω0——太阳轮角速度,rad/s
ω2——行星轮角速度,rad/s
ωH——驱动壳体瞬时角速度,rad/s
Z0——太阳轮齿数
Z1——中间轮齿数
Z2——行星轮齿数
由于太阳轮静止不动,即可推出
ω0=ω2=0
(2)
所以,根据式(2)得到喷肥针的角速度为零,其相对运动轨迹为绕O点的圆,如将喷肥针初始安装位置为垂直地面,即在驱动壳体转动的过程中,喷肥针始终围绕O点一直保持垂直姿态90°扎穴。
行星轮中心点B的相对位移方程为
(3)
式中xB、yB——B点水平相对位移与垂直相对位移,m
LOB——太阳轮与行星轮之间的中心距,m
θ——驱动壳体中心线与x轴之间的夹角,rad
则B点的相对速度方程为
(4)
其中
θ=θ2+θ0
式中vBx、vBy——B点水平相对速度与垂直相对速度,m/s
θ0——驱动壳体中心线与x轴之间的初始夹角,rad
θ2——驱动壳体在t时间内转过的角度(从动卵形齿轮转角),rad
由于喷肥针D点相对行星轮B点并无角度转动,所以D点与B点的相对速度相同,则D点的绝对速度方程为
(5)
式中vDx、vDy——D点水平绝对速度与垂直绝对速度,m/s
v——机构的前进速度,m/s

2.2 卵形齿轮啮合原理
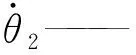
卵形齿轮传动是一对完全相同的节曲线围绕各自的旋转中心作纯滚动,如图3所示。
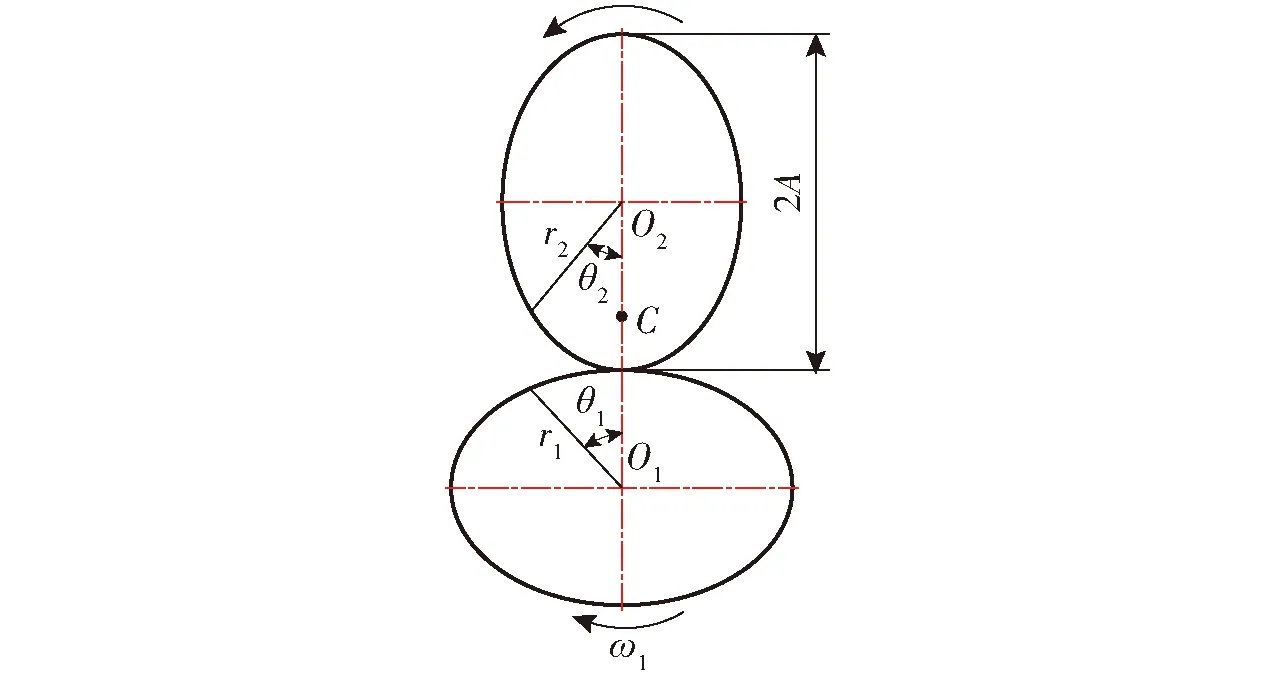
图3 卵形齿轮传动示意图Fig.3 Transmission of oval-shaped gears
卵形齿轮节曲线方程为[15-18]
(6)
(7)
(8)
(9)
式中r1——主动卵形齿轮的节曲线,mm
r2——从动卵形齿轮的节曲线,mm
θ1——主动卵形齿轮转角,rad
A——卵形齿轮长半轴距离,mm
a——两个卵形齿轮的中心距,mm
e——偏心率
根据式(4)可知,喷肥针在入土到最低点的过程中,随着驱动壳体的转动,θ逐渐增大,即vBx逐渐增大,如将瞬时角速度逐渐变小,则可保证vDx为一定值且趋近于零。同理,喷肥针在最低点到出土过程中,需将瞬时角速度逐渐增大。通过研究卵形齿轮的啮合传动特性,可保证喷肥针实现小穴口的特定要求。
3 卵形- 全正圆齿轮行星系变速扎穴机构参数设计
3.1 工作参数的设定
根据文中建立的机构数学模型,设定主动卵形齿轮转速120 r/min,则从动卵形齿轮为同一转速,说明扎穴机构每秒扎穴4次,将穴距设定为300 mm,则v=1.2 m/s[19-20]。
3.2 结构参数的设计
LOB为决定驱动壳体纵向尺寸的主要影响因素。纵向尺寸过大,机构动力学性能变差,驱动力变大;纵向尺寸过小,易导致相邻之间的喷肥针干涉,穴距变小。如图4所示。
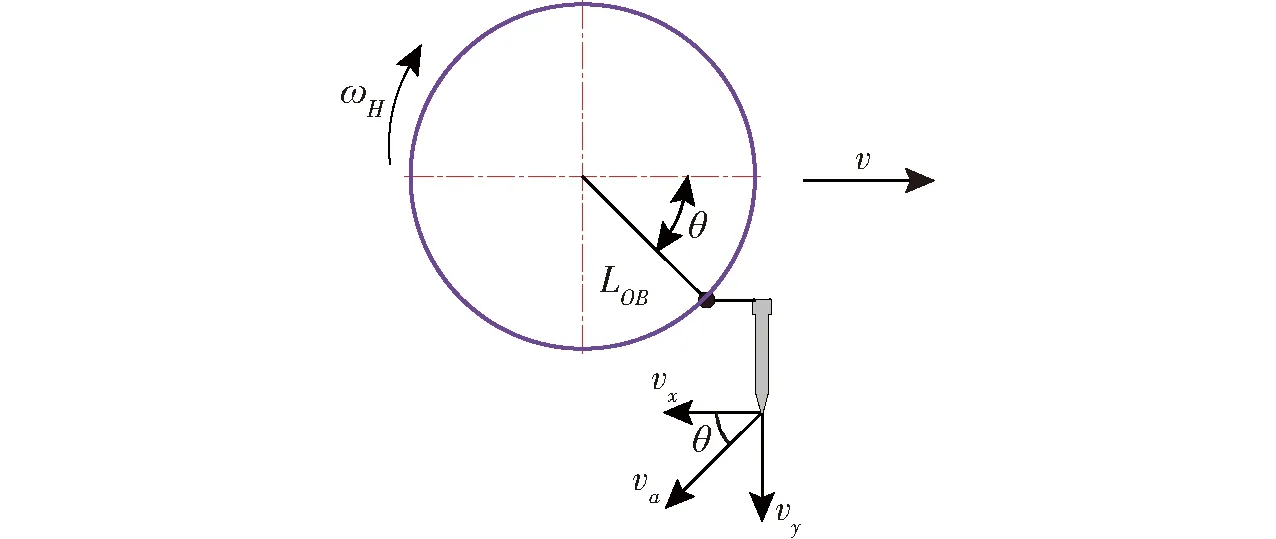
图4 喷肥针工作示意图Fig.4 Schematic diagram of spray fertilizer needle
根据前期研究,为保证穴距300 mm及良好的动力学性能,LOB应在120~150 mm之间。本文选择LOB为136 mm,则求得正圆齿轮节曲线直径为68 mm。为避免驱动壳体刮土和达到农艺要求深施肥深度,喷肥针的设计尺寸需略大于正圆齿轮节曲线半径(34 mm)、扎穴深度(80 mm)和驱动壳体壁厚相加的尺寸,所以设定的喷肥针长度为140 mm。

4 虚拟试验验证
为验证机构设计的合理性,通过Pro/E软件建立扎穴机构三维模型,并导入到ADAMS软件进行扎穴轨迹验证。图5为扎穴机构相对运动轨迹,轨迹形状为圆形,符合全正圆齿轮行星系传动特性,喷肥针始终保证垂直姿态扎穴。图6为扎穴机构在前进速度1.2 m/s与转速120 r/min下的绝对运动轨迹。

图5 扎穴机构相对运动轨迹Fig.5 Relative motion trajectory of pricking hole mechanism

图6 扎穴机构绝对运动轨迹Fig.6 Absolute motion trajectory of pricking hole mechanism
从图6中获知,在喷肥针入出土轨迹段,存在轨迹段重合部分,图中红色圆圈区域所示轨迹为“Y”形轨迹。说明在此过程中,经过扎穴机构的变速运动,满足喷肥针的水平绝对速度为零的特性要求,此时仅有垂直绝对速度,穴口尺寸与喷肥针直径尺寸相同。综上所述,设计的机构可满足喷肥针垂直姿态扎穴,当机构前进速度为1.2 m/s时,扎穴机构既能保证高速扎穴也能保证穴口小的特定要求,此时穴口大小为26 mm,满足扎穴施肥农艺要求。
5 试验
5.1 试验测试与方法
为验证设计的卵形- 全正圆齿轮行星系变速扎穴机构正确性,本文利用高速摄像技术,对卵形- 全正圆齿轮行星系变速扎穴机构喷肥针的绝对运动进行拍摄[21-22],并在土槽上对机构进行扎穴试验,如图7所示。试验地点为东北农业大学工程学院农具实验室,依据中耕时期的土壤状况要求,调整土壤坚实度范围为0.6~1.0 MPa,含水率为15%~25%。
图7 扎穴机构性能试验Fig.7 Performance experiment of pricking hole mechanism
根据理论分析得到的机构结构与工作参数,调节驱动壳体转速至120 r/min平稳转动,机构前进速度为1.2 m/s,通过高速摄像机对扎穴机构进行拍摄。运用Phantom V5.1软件建立坐标系,并记录喷肥针尖点的坐标,通过Excel软件对数据点进行曲线拟合,获得实际的喷肥针绝对运动轨迹与速度曲线。将扎穴深度调整为80 mm并测量穴口尺寸。
5.2 试验结果与分析
喷肥针的绝对运动轨迹曲线如图8所示;喷肥针水平绝对速度曲线如图9所示。穴口宽度平均为28.6 mm,如表1所示。
从图8中可以看出,在一个扎穴周期内,测得喷肥针轨迹高度为275.3 mm,轨迹长度为602.5 mm。测得的轨迹曲线与仿真得到的轨迹曲线相比,形状相同(“Y”形轨迹)。喷肥针在入土与出土过程中,轨迹底端存在曲线重合部分(水平绝对位移602.5 mm位置处)。从图9中可以看出,喷肥针完成一个扎穴周期内,水平绝对速度曲线为余弦函数曲线,最小值为0 m/s,最大值为3.13 m/s。开始时,喷肥针从第1个穴口最底端出土;0.5 s结束时,喷肥针达到第2个穴口最底端。在0~ 0.04 s与0.46~ 0.50 s内,喷肥针水平绝对速度为零。由表1数据得知,测得的穴口宽度与理论值26 mm相差2.6 mm,由于扎穴速度较大,所以机构的振动是造成误差的主要原因。
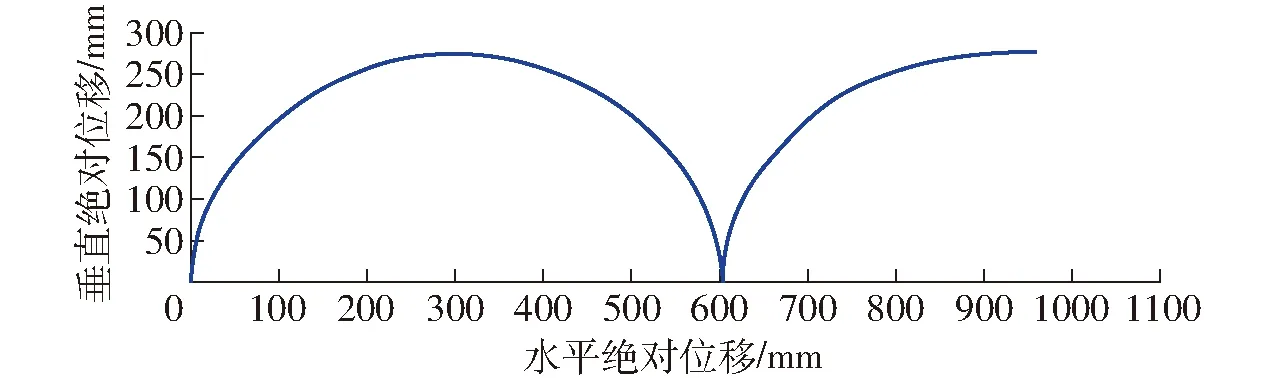
图8 喷肥针绝对运动轨迹Fig.8 Absolute motion trajectory of spray fertilizer needle
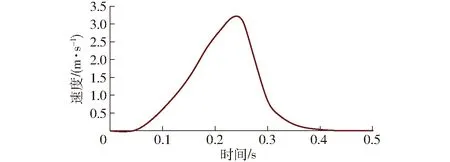
图9 喷肥针水平绝对速度曲线Fig.9 Absolute horizontal velocity curve of spray fertilizer needle
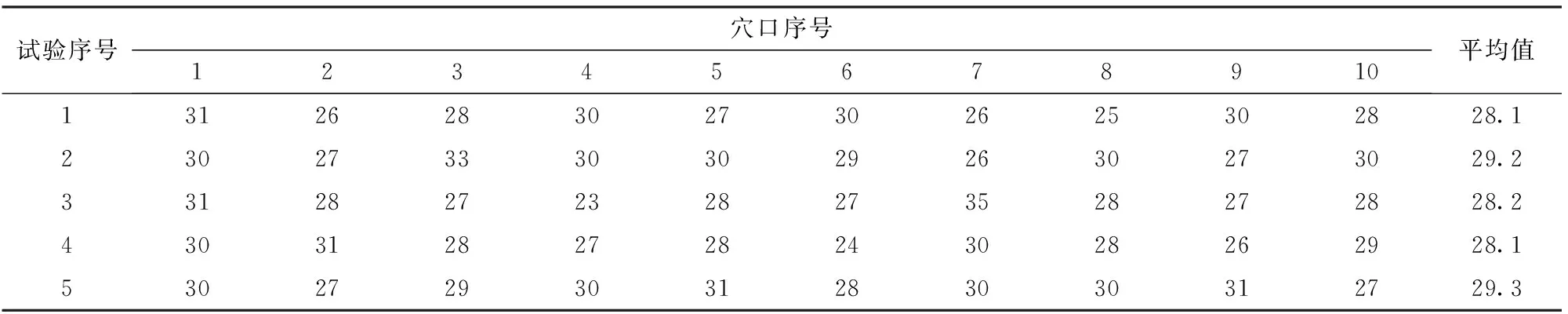
试验序号穴口序号12345678910平均值13126283027302625302828.123027333030292630273029.233128272328273528272828.243031282728243028262928.153027293031283030312729.3
扎穴机构在一个工作周期内,通过卵形齿轮相互啮合传动,驱动壳体时刻存在角速度变化。根据式(5)可知,满足喷肥针在入土与出土轨迹段中,其部分时刻水平绝对速度为零的特性要求。所以存在图8轨迹重合部分与图9水平绝对速度为零的变化趋势,验证了理论设计的正确性。
6 结论
(1)根据卵形齿轮与全正圆齿轮行星系的啮合特性,设计了一种满足喷肥针变速垂直作业的卵形- 全正圆齿轮行星系变速扎穴机构,并建立该机构的数学模型,根据设计目标与要求,最终得到机构的结构与工作参数。
(2)根据理论分析得到的机构参数,对卵形- 全正圆齿轮行星系变速扎穴机构进行虚拟试验,得到喷肥针的相对与绝对运动轨迹曲线,验证了喷肥针保证入出土的垂直姿态的同时,也可保证穴口小的要求。
(3)对机构进行高速摄像与扎穴试验。试验结果表明,喷肥针在前进速度1.2 m/s、扎穴转速120 r/min与扎穴深度80 mm下,喷肥针在入土与出土过程中,轨迹底端存在曲线重合部分,此时水平绝对速度为零。所以,卵形- 全正圆齿轮行星系变速扎穴机构的结构特性可兼得喷肥针垂直扎穴与穴口小的目标,并测得穴口宽度为28.6 mm,达到农艺施肥要求。
1 王云霞.液体肥料的应用现状与发展趋势[J].化肥设计,2003,41(4):10-13.
WANG Yunxia. Present application situation of liquid fertilizer and its development tendency[J]. Chemical Fertilizer Design,2003,41(4):10-13.(in Chinese)
2 徐秀成.提高肥料利用率化工部门能做些什么[J].磷肥与复肥,1999,14(3):6-11.
XU Xiucheng. What can departments of chemical industry do for raising fertilizer use efficiency [J]. Phosphate & Compound Fertilizer,1999,14(3):6-11.(in Chinese)
3 窦桂梅,刘巧英.机械深施化肥应用技术研究[J].山西农业科学,2000,28(2):3-6.
DOU Guimei, LIU Qiaoying. Research on application technology of mechanized deep fertilization[J]. Agricultural Science of Shanxi, 2000,28(2):3-6.(in Chinese)
4 李伟,李絮花,李海燕,等.控释尿素与普通尿素混施对夏玉米产量和氮肥效率的影响[J].作物学报,2012,38(4):700-709.
LI Wei, LI Xuhua, LI Haiyan, et al. Effect of different mixing rates of controlled-release urea and common urea on grain yield and nitrogen use efficiency of summer maize [J]. Acta Agronomica Sinica,2012,38(4):700-709.(in Chinese)
5 张义峰,杨景波,衣淑娟.牧草免耕播种与液体施肥机的设计[J].黑龙江八一农垦大学学报,2011,23(4):20-22.
ZHANG Yifeng, YANG Jingbo, YI Shujuan. Design on machine of fodder grass zero tillage seeding and liquid apply fertilizer[J]. Journal of Heilongjiang Bayi Agricultural University,2011,23(4):20-22.(in Chinese)
6 MARCELO J S, HENRIQUE C J F, PAULO S G M, et al. Liquid fertilizer application to ratoon cane using a soil punching method[J].Soil & Tillage Research, 2017,165:279-285.
7 WOMAC A R, TOMPKIINS F D. Probe-type injector for fluid fertilizers[J]. Applied Engineering in Agriculture,1990,6(2):149-154.
8 王金武,周文琪,张春凤,等. 非规则齿轮行星系扎穴机构反求设计与试验[J/OL].农业机械学报,2015,46(11):71-75. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20151111&flag=1. DOI:10.6041/j.issn.1000-1298.2015.11.011.
WANG Jinwu,ZHOU Wenqi,ZHANG Chunfeng,et al. Reverse design and experiment of non-circular gear planetary system picking hole mechanism[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015,46(11):71-75.(in Chinese)
9 刘春香,王金武,周文琪,等.液肥深施双斜孔式喷肥针动力学分析与试验[J/OL].农业机械学报,2016,47(3):54-58. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160308&flag=1. DOI:10.6041/j.issn.1000-1298.2016.03.008.
LIU Chunxiang, WANG Jinwu, ZHOU Wenqi, et al. Dynamics analysis and experiment of double oblique hole spray fertilizer needle of liquid fertilizer deep-fertilization[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(3):54-58.(in Chinese)
10 刘春香,王金武,唐汉,等.基于贝塞尔曲线的液肥扎穴机构动力学分析与试验[J/OL].农业机械学报,2016,47(5):116-122. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160516&flag=1. DOI:10.6041/j.issn.1000-1298.2016.05.016.
LIU Chunxiang,WANG Jinwu,TANG Han, et al. Dynamics analysis and test on picking hole mechanism of liquid fertilizer based on bezier curve[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2016,47(5):116-122.(in Chinese)
11 王金武,刘亚华,王金峰,等.全椭圆齿轮行星系液态肥深施机构优化设计与试验[J/OL].农业机械学报,2012,43(10):59-65. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20121011&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2012.10.011.
WANG Jinwu, LIU Yahua, WANG Jinfeng,et al. Optimized design and experimental of the liquid fertilizer deep mechanism with planetary elliptic gears[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2012,43(10):59-65.(in Chinese)
12 冯金龙,王金武,周文琪,等. 变形椭圆齿轮式扎穴机构设计与工作参数试验优化[J/OL].农业机械学报,2017,48(4):90-96.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170411&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2017.04.011.
FENG Jinlong,WANG Jinwu,ZHOU Wenqi, et al. Design of pricking hole mechanism with deformation elliptical gears and optimization of experiment with work parameters[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(4):90-96. (in Chinese)
13 王金武,周文琪,王秀,等. 基于三次拉格朗日曲线拟合轨迹的斜置式扎穴机构研究[J/OL].农业机械学报,2017,48(5):79-85. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170509&flag=1. DOI:10.6041/j.issn.1000-1298.2017.05.009.
WANG Jinwu,ZHOU Wenqi,WANG Xiu, et al. Oblique type pricking hole mechanism based on lagrange curve for cubic fitting trajectory[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(5):79-85.(in Chinese)
14 王金武,周文琪,王金峰,等.斜置式非规则齿轮行星轮系扎穴机构工作参数试验优化[J/OL].农业机械学报,2017,48(6):66-70.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170608&flag=1. DOI:10.6041/j.issn.1000-1298.2017.06.008.
WANG Jinwu, ZHOU Wenqi, WANG Jinfeng, et al. Experiment and optimization of working parameters for pricking hole mechanism of oblique type non-circular gears planetary system[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2017,48(6):66-70. (in Chinese)
15 陈继照.椭圆齿轮行星系分插机构动力学特性研究 [D].南宁:广西大学,2016.
16 王英,夏旭东,何小晶,等.偏心- 椭圆齿轮行星轮系栽植装置动力学优化与试验[J/OL].农业机械学报,2017,48(1):38-46. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20170106&flag=1. DOI:10.6041/j.issn.1000-1298.2017.01.006.
WANG Ying, XIA Xudong, HE Xiaojing, et al. Dynamics optimization and experiment of planting device driven by planetary eccentric gears and elliptic gears[J/OL].Transactions of the Chinese Society for Agricultural Machinery, 2017,48(1):38-46. (in Chinese)
17 徐洪广,赵匀,张允慧,等. 水稻钵苗移栽机变性卵形齿轮分秧机构的运动机理分析[J].农业工程学报,2012,28(7):10-15.
XU Hongguang, ZHAO Yun, ZHANG Yunhui, et al. Analysis on kinematic principle for seedling-picking machinery of rice transplanter with deformed oval gears[J].Transactions of the CSAE, 2012,28(7):10-15.(in Chinese)
18 陈建能,王英,黄前泽,等.钵苗移栽机变形椭圆齿轮行星系植苗机构优化与试验[J/OL].农业机械学报,2013,44(10): 52-56.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20131009&flag=1.DOI:10.6041/j.issn.1000-1298.2013.10.009.
CHEN Jianneng,WANG Ying,HUANG Qianze,et al.Optimization and test of transplanting mechanism with planetary deformed elliptic gears for potted-seedling transplanter[J/OL].Transactions of the Chinese Society for Agricultural Machinery,2013,44(10): 52-56. (in Chinese)
19 赵匀.机构数值分析与综合[M].北京:机械工业出版社,2005.
20 吴序堂,王贵海.非圆齿轮及非匀速比传动[M].北京:机械工业出版社,1997.
21 余佳佳,丁幼春,廖宜涛,等.基于高速摄像的气力式油菜精量排种器投种轨迹分析[J].华中农业大学学报,2014,33(3):103-108.
YU Jiajia, DING Youchun, LIAO Yitao,et al. High-speed photography analysis of dropping trajectory on pneumatic metering device for rapeseed[J]. Journal of Huazhong Agricultural University,2014,33(3):103-108.(in Chinese)
22 陶桂香,衣淑娟,汪春,等.基于高速摄像技术的水稻钵盘精量播种装置投种过程分析[J].农业工程学报,2012,28(2):197-201.
TAO Guixiang, YI Shujuan, WANG Chun, et al. Analysis on dropping processing of precision sowing device in rice seeding bowl by high-speed photography[J].Transactions of the CSAE, 2012, 28(2):197-201.(in Chinese)
猜你喜欢
小哥白尼(趣味科学)(2022年7期)2022-09-20
——奇妙的蛋
趣味(数学)(2022年5期)2022-07-29
军事文摘(2022年10期)2022-06-15
电子乐园·下旬刊(2022年5期)2022-05-13
老年教育(2021年1期)2021-02-02
食品与机械(2020年1期)2020-03-06
阅读(快乐英语高年级)(2020年10期)2020-01-08
模具制造(2019年3期)2019-06-06
制造技术与机床(2019年4期)2019-04-04
西藏人文地理(2019年2期)2019-03-26