2BDB- 6(110)型大豆仿生智能耕播机设计与试验
2018-05-31 03:15贾洪雷赵佳乐郭明卓王增辉
农业机械学报 2018年5期
贾洪雷 郑 健 赵佳乐 郭明卓 庄 健 王增辉
(1.吉林大学工程仿生教育部重点实验室, 长春 130025; 2.吉林大学生物与农业工程学院, 长春 130025;3.东北师范大学人文学院, 长春 130117)
0 引言
东北地区是我国规模最大的大豆种植区,大豆种植面积和产量约占全国的40%以上[1]。东北地区地处冷凉区,气候低温易旱,春播时存在严重的土壤冻结现象,导致耕种层土壤温度回升缓慢,土壤水分不足,影响了大豆根系生长,延缓了大豆初期发育,缩短了大豆生长周期,进而严重影响大豆产量。因此,如何提升春播时耕种层土壤温度与含水率,是提升我国东北地区大豆产量的关键。
HOLEN等[2]研究表明,耕种层土壤中的大孔隙通常是土壤与外界物质能量交换的主要通道;JABRO等[3]研究得出浅松作业可有效疏松耕种层土壤,增大耕种层土壤大孔隙度;因此,进行浅松作业可有效促进耕种层土壤与外界的物质能量交换,进而加速土壤温度回升。单成钢等[4]研究表明垄作具有提升地温的作用;王旭清等[5]研究表明垄作能减少漏光损失,增强土壤吸热能力,提高作物产量;何进等[6]研究表明良好的垄面成型能力是衡量扶垄效果的重要指标;因此,在播种后进行垄型修复(扶垄)作业,亦可起到增强土壤吸热能力的作用。ASARE等[7]和TASER等[8]研究均表明镇压作业的稳定性对土壤含水率具有显著影响,研制可对镇压作业进行实时监控的智能化系统,可保障镇压作业质量,显著提升土壤含水率。因此,本文设计一种一次进地可同时完成浅松、碎土、播种、扶垄和镇压作业的大豆耕播机具,可在完成播种作业的同时,有效提升耕种层土壤温度与含水率。
耕播联合机具作业时存在阻力大、能耗高的难题,其耕作阻力主要由触土部件与土壤接触产生,因此降低触土部件摩擦力,可有效提高作业效率。任露泉等[9]指出仿生结构具有减阻性能,马付良等[10]研究表明仿生技术具有减阻效果好、可设计性强等优点。因此,本文采用仿生学减阻设计方法对关键触土部件几何结构进行优化设计,从而有效降低作业阻力。本文通过分析野兔爪趾挖掘土壤时的减阻结构机理,设计仿生减阻浅松铲;分析采集的穿山甲鳞片表面结构参数,设计仿生扶垄铲表面。
综上,本文通过对耕播联合技术、仿生减阻技术的集成创新,设计2BDB- 6(110)型大豆仿生智能耕播机,并在黑龙江省勃利县进行相关田间试验,研究仿生耕整机构对土壤温度以及作业阻力的影响机理;明确镇压力自动调节系统对土壤含水率的影响;探索耕播联合作业的最佳参数组合,为东北地区大豆高产技术提供装备支撑。
1 整机结构与原理
1.1 整机结构
目前,垄上4行种植是中国东北地区一种新型大豆种植模式,单垄垄宽1 100 mm,垄高300 mm,实行垄上4行拐子苗种植模式,其相较于传统的大垄双行种植模式,增加了植株密度,提高了土地利用率,加大了叶面积指数,从而达到最大限度发挥增产潜力的目的,本文基于该种模式设计了2BDB- 6(110)型大豆仿生智能耕播机。如图1a所示,该机由机架、12组播种单体、7组耕整单体和动力传动系统构成。如图1b所示,每组播种单体由1组V型双圆盘开沟装置、1套双腔气吸式排种装置和1组镇压力自动调节系统等组成,各播种单体相互间距为450 mm。如图1c所示,耕整单体设有仿生减阻浅松铲和仿生扶垄铲各1件,耕整单体相互间距为1 100 mm。如图2所示,传动系统设计为双侧独立多级机械式链条传动,地轮作为整机传动的动力源,通过链传动驱动排种器与排肥器,地轮通过链轮将动力传递给传动轴Ⅰ,传动轴Ⅰ将动力同时传递给动力轴Ⅱ,传动轴Ⅱ与播种单体四连杆之间增设一级传动,即传动轴Ⅲ,传动轴Ⅲ带动排种轴进行排种。
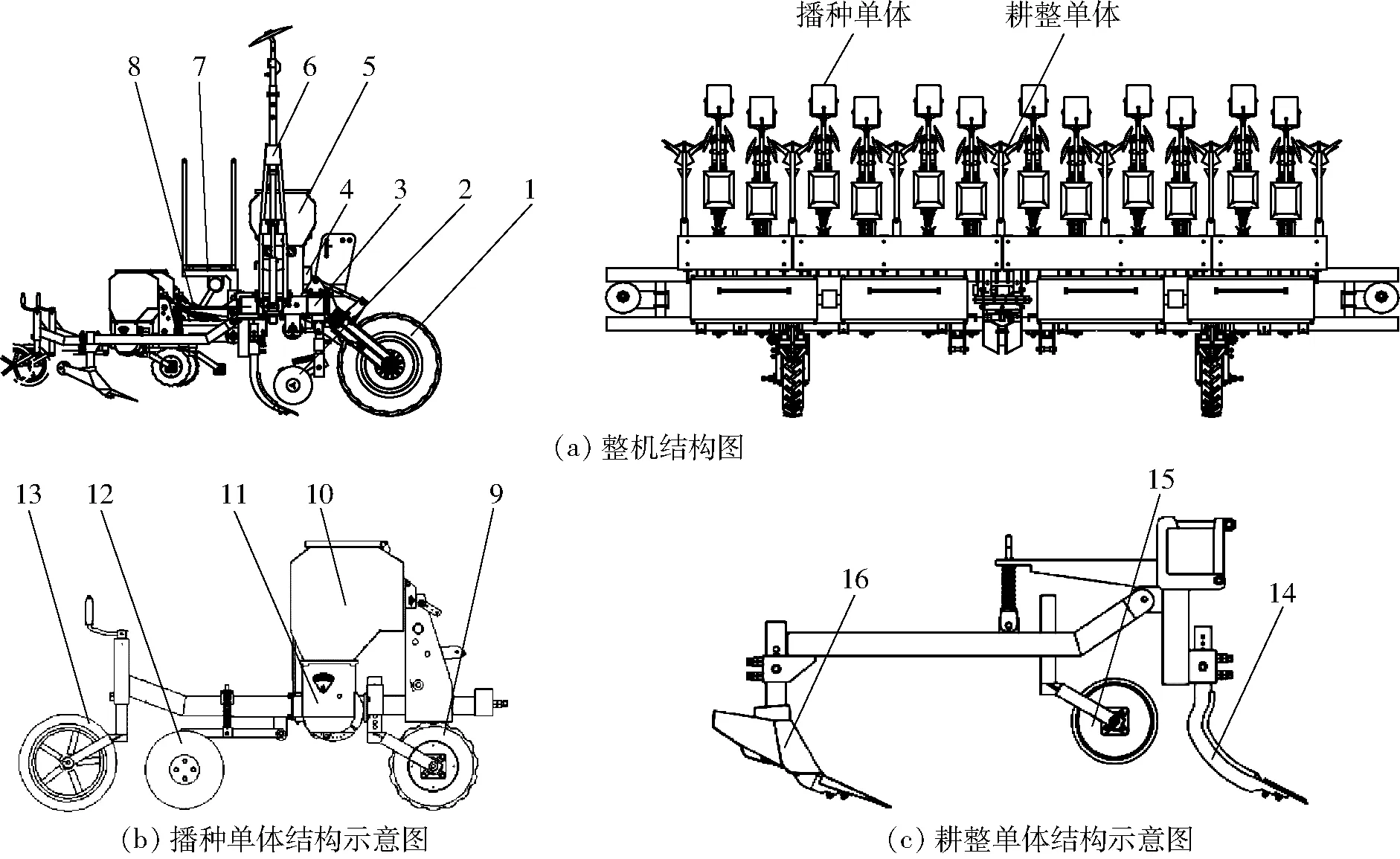
图1 2BDB- 6(110)型大豆仿生智能耕播机整机结构示意图Fig.1 Schematic diagrams of 2BDB- 6(110) soybean bionic intelligent till-sowing machine1.地轮 2.施肥开沟装置 3.机架组合 4.风机 5.肥箱 6.划印器 7.踏板组件 8.四连杆仿行机构 9.V型双圆盘开沟装置 10.种箱11.双腔气吸式排种装置 12.三圆盘挤压式覆土器 13.镇压力自动调节系统 14.仿生减阻浅松铲 15.V型碎土辊 16.仿生扶垄铲

图2 整机传动示意图Fig.2 Transmission diagram of machine1.传动轴Ⅰ 2.左地轮轴 3.链传动组合 4.传动轴Ⅱ 5.传动轴Ⅲ 6.排种轴 7.排种器驱动链轮焊合处 8.排种器 9.地轮张紧轮组合 10.右地轮轴 11.横梁支架 12.肥箱支架 13.传动轴Ⅰ张紧轮组合 14.传动轴Ⅱ张紧轮组合
1.2 作业原理
2BDB- 6(110)型大豆仿生智能耕播机主要作业参数如表1所示。如图3所示,耕整单体除V型碎土辊于垄上作业外,其余部件均作业于垄沟,播种单体均在垄上进行拐子苗播种作业,其播种模式如图4所示。作业时随着机具的前进,仿生减阻浅松铲(图5a)对表层土壤进行疏松,通过对其铲柄结构的仿生设计,减小浅松铲的作业阻力;浅松后,地表浅层土壤结构被改变,产生的土块被V型碎土辊(图5b)进一步压碎,使种床土壤细碎平整,同时对整机进行限深;V型双圆盘开沟装置在平整后的垄上进行作业,开出2条间距为220 mm的种沟;双腔气吸式排种器同时对2条种沟进行双行交错播种,播种间距为90 mm;仿生起垄铲(图5c)对原垄进行修整,完善垄形结构,其铲体表面具有穿山甲鳞片仿生结构,可有效减小扶垄过程中产生的摩擦力。最后,镇压力自动调节系统(图5d)对镇压力值进行实时监测,并通过镇压力控制装置调节镇压力大小,进而保证镇压作业稳定性。
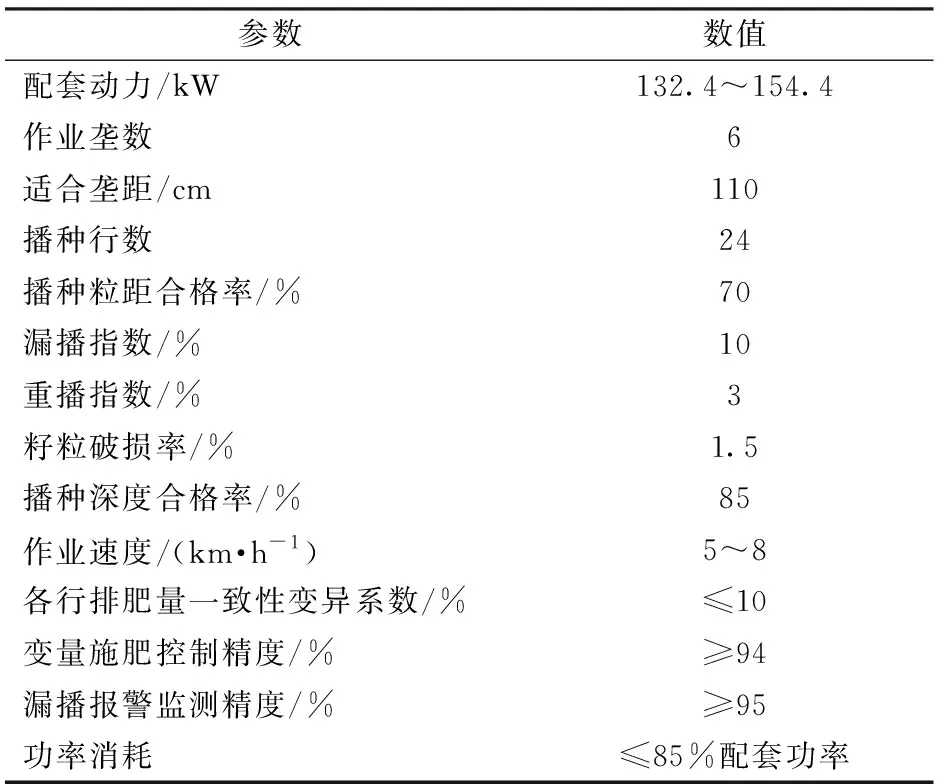
表1 2BDB- 6(110)型大豆仿生智能耕播机主要技术参数Tab.1 Main technical parameters of 2BDB- 6(110) soybean bionic intelligent till-sowing machine
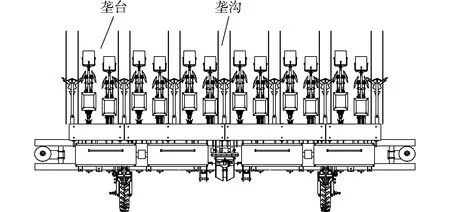
图3 耕整单体和播种单体作业位置示意图Fig.3 Diagram of sowing unit and soil tillage and preparation unit operating location
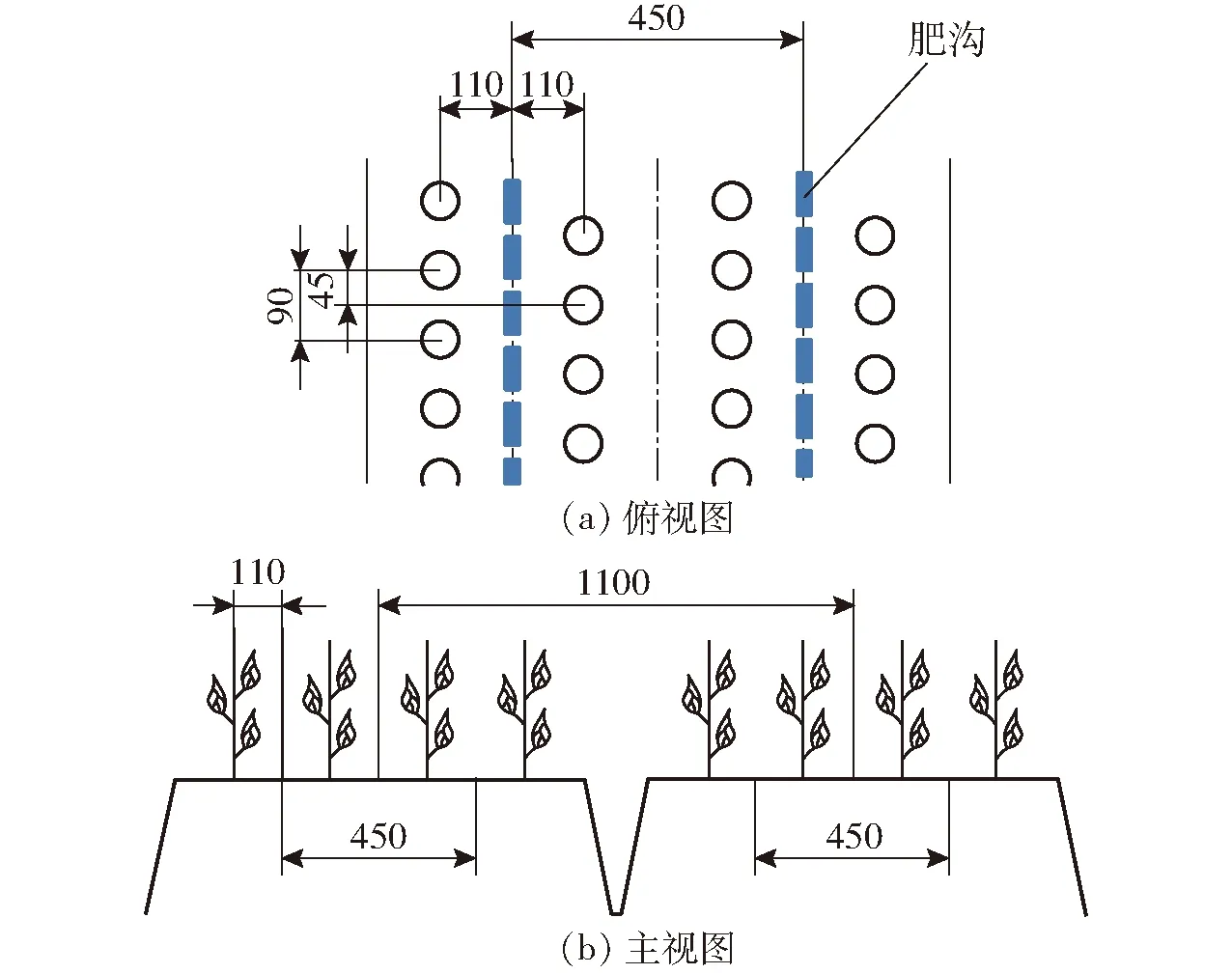
图4 垄上双行交错播种模式示意图Fig.4 Diagram of double row and staggered planting pattern on ridge
2 关键机构设计
2.1 镇压力自动调节系统
镇压力自动调节系统主要由仿形弹性镇压辊、镇压力监测装置和镇压力控制机构组成。其中,仿形弹性镇压轮主要由轮壁、弹簧套管、弹簧、中心轴、高度调节装置等组成,其结构如图6所示。
2.1.1镇压力监测装置
镇压力监测装置由主节点和子节点两部分组成,子节点由单片机CC2530和直线位移传感器组成,子节点和主节点硬件框图如图7、8所示。直线位移传感器置于镇压轮的辐条套管外壁处,将轮辐伸缩量参数信号转换为电压信号,即辐条套管相对于辐条轴的位移信号。通过镇压力标定,得到镇压力与直线位移传感器压缩位移量信号之间的函数模型。镇压力采集模块置于镇压轮的轮壁上,其主控芯片CC2530与传感器相连,将传感器的测量数据发送给主节点,车速传感器(NJK- 5002C(8002C)型霍尔传感器)安装在拖拉机后轮上,用于测量机具前进速度[11]。主节点接收子节点和车速传感器数据后,通过RS232串口传给工控机,工控机依据数学函数模型将数据进行换算得到镇压力的值并实时显示,达到监测镇压力的目的。镇压力监测装置安装示意图如图9所示[12]。
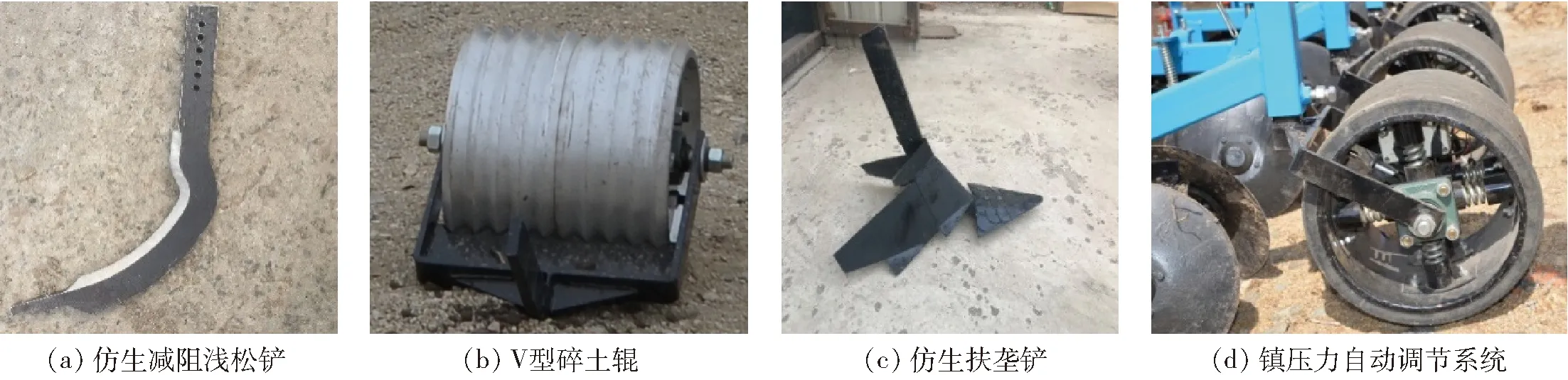
图5 关键部件结构图Fig.5 Structure diagrams of key components

图6 仿形弹性镇压辊结构图Fig.6 Structure diagram of profiling elastic press wheel1.高度调节装置 2.轮架 3.辊筒 4.中心轴 5.辐条 6.辐条套管
2.1.2镇压力控制系统
系统硬件主要包括信号采集器和镇压力控制器两部分,信号采集器的原理如图10所示。图中,U2为磁隔离线性放大器ISOEM,用于将信号调理电路输出的电压信号放大至0~5 V以便A/D转换器能将其采集。U3为10位A/D转换器TLC1543,用于采集放大后的直线位移传感器电压信号,其通过DATAOUT引脚(与单片机的P0.3引脚相连接)将转换后的数据输入STC89C52单片机。芯片TLC1543的其它功能引脚EOC、I/O clock、ADDRESS和CS分别与单片机的I/O引脚P0.0、P0.1、P0.2和P0.4相连。无线发射模块采用NRF24L01,主要负责将STC89C52单片机处理后直线位移传感器传感信号发射至镇压力控制器。
镇压力控制器的原理如图11所示,其采用无线接收模块NRF24L01接收直线位移传感器信号。信号经单片机分析、计算后,单片机通过I/O引脚P2.5输出一个执行控制信号,该控制信号经10位D/A转换芯片TLC5615处理后转换成模拟信号,之后经功率放大后,可作为电- 气比例阀的驱动信号,从而起到调节镇压力的效果。
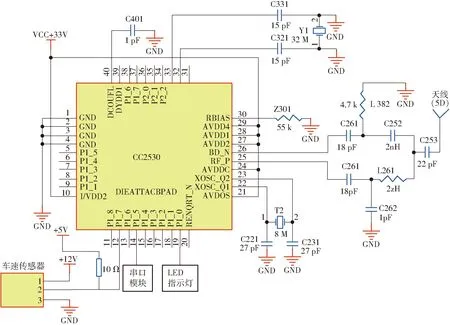
图8 主节点硬件框图Fig.8 Hardware frame diagram of main node function

图9 镇压力监测装置安装示意图Fig.9 Connection diagram of pressure acquisition module
如图12所示,气压传动系统由空气压缩机、储气罐、过滤器、电- 气比例阀和空气弹簧组成。空气压缩机产生压缩空气存储在储气罐内,由过滤器过滤,滤除压缩空气中的粉尘和杂质。信号采集器采集到直线位移传感器输出信号时,通过无线传输方式将该信号传输到镇压力控制器,再由镇压力控制器输出控制信号,驱动电- 气比例阀输出稳定的气压力,从而控制空气弹簧产生相应大小的推力。
本文所设计镇压力控制装置采用空气弹簧系统,其相较于目前常见的液压控制系统,具有响应速度快的优势,同时液压油易受到空气中粉尘等杂质的污染,因此空气弹簧系统的工作寿命相对较长。如图13所示,镇压力调节机构主要由旋柄、空气弹簧、空气弹簧连接架、空气弹簧支架组成,空气弹簧底端通过螺栓与镇压辊上的空气弹簧托板(即镇压辊连接柄)固连,空气弹簧连接架则与空气弹簧顶端固连。机具作业前,通过旋转旋柄带动空气弹簧连接架上下移动,待移动至预设镇压强度值后固定旋柄不动,则空气弹簧连接架随之固定,此时空气弹簧顶端与镇压辊机架呈刚性连接。作业时,空气弹簧垂直向下的推力通过空气弹簧托板(即镇压辊连接柄)传递给镇压辊,使其向下运动,从而实现对镇压力的调节。
2.2 仿生耕整机构设计
2.2.1空间曲面浅松铲仿生设计
研究表明,深松铲柄在维持铲刀位置、传递破土动力的同时,自身还承担着破开前方表层土壤的任务,其受到的土壤阻力是总阻力的主要部分,因而合理的铲柄结构可有效降低工作阻力,减少作业能耗[13]。野兔具有非常优秀的土壤挖掘能力,其挖掘的洞穴可在地下形成复杂的体系结构,野兔挖洞时,后腿为身体提供支撑,前爪对土壤进行切削同时抛送,其前爪爪趾结构与形态处于最优化状态,可将切削土壤时的阻力减至最小[14]。本文通过仿生学设计思想,提取兔前爪结构形态,对浅松铲铲柄部位进行改型设计,设计仿生浅松铲铲柄。
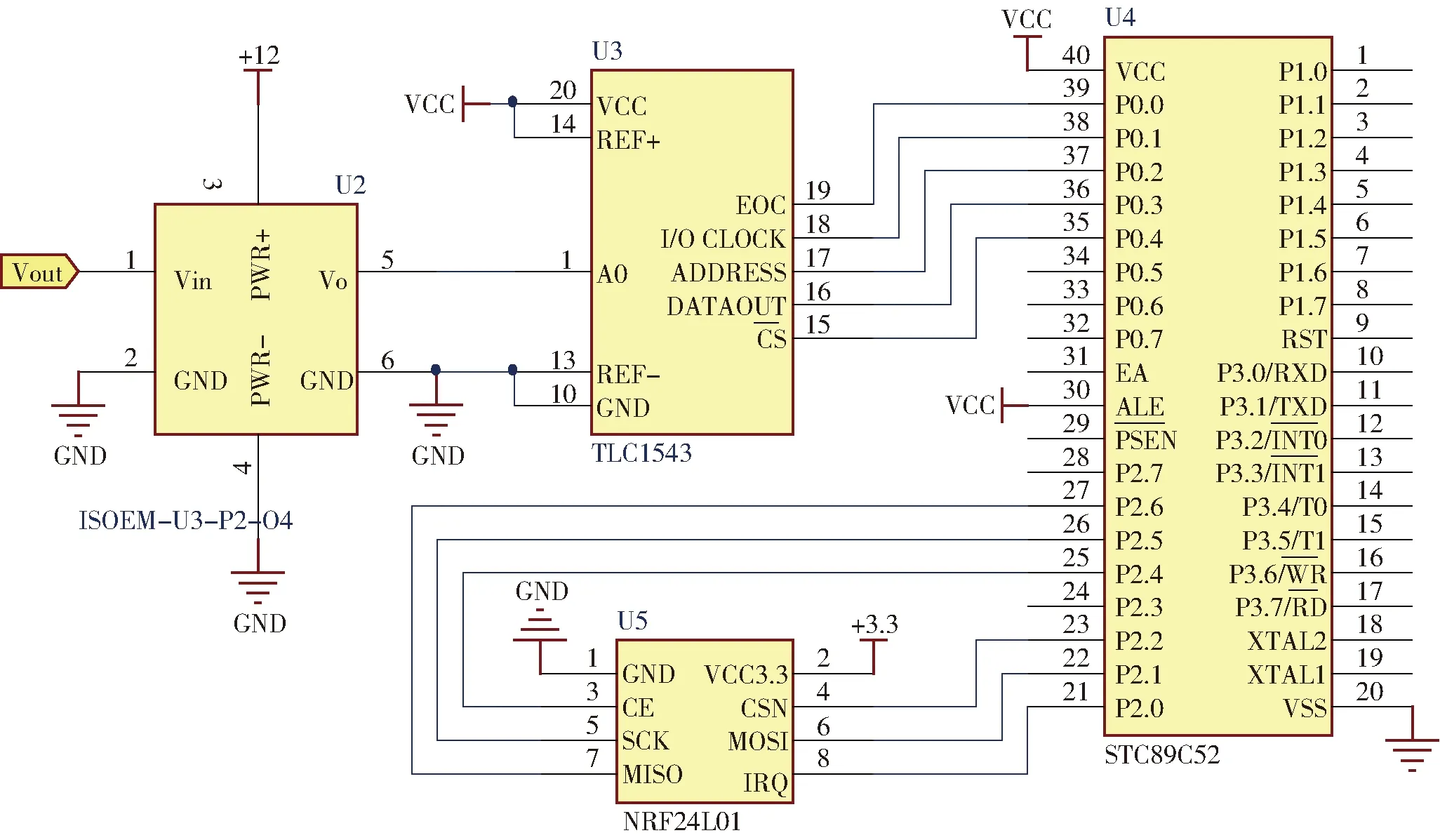
图10 信号采集器原理图Fig.10 Schematic diagram of signal collector
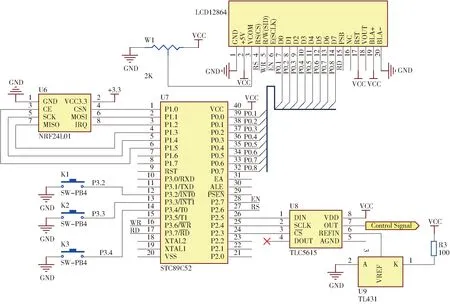
图11 镇压力控制器原理图Fig.11 Overall frame diagram of pressure controller

图12 气压传动系统结构示意图Fig.12 Schematic diagram of pneumatic drive device structure1.空气弹簧 2.电- 气比例阀 3.过滤器 4.储气罐 5.空气压缩机
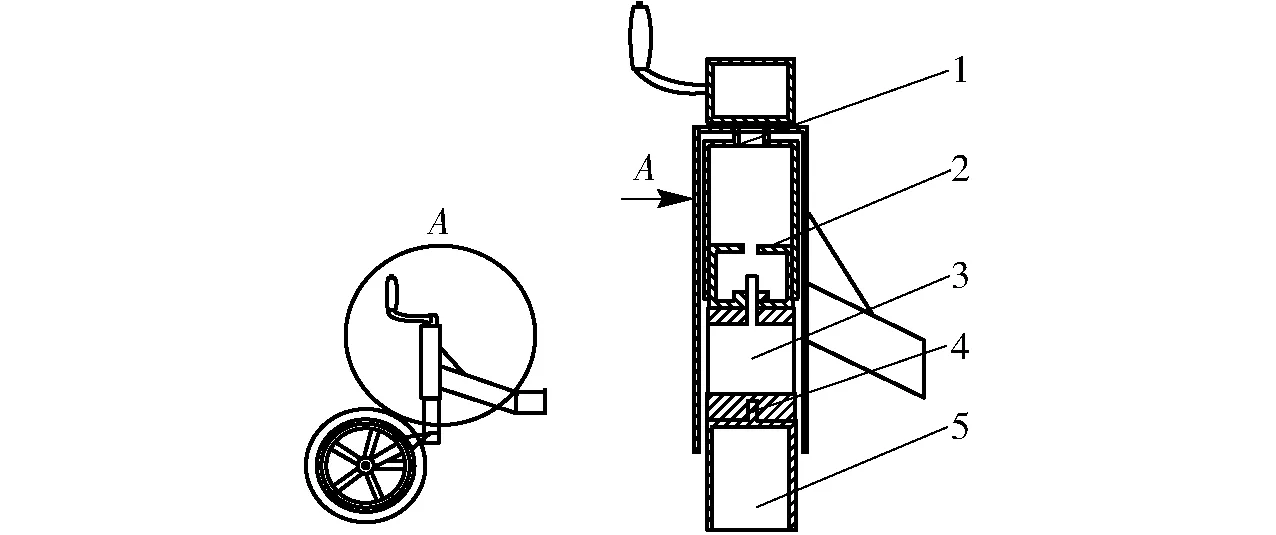
图13 镇压力调节机构结构图Fig.13 Schematic diagram of pressure regulating mechanism structure1.旋柄 2.空气弹簧连接架 3.空气弹簧 4.螺栓 5.空气弹簧托板(镇压辊连接柄)
观察发现,如图14a所示,野兔前爪5个爪趾结构特点基本相似,进行挖掘作业时主要为前爪趾破土,因此采用逆向扫描仪对第1爪趾的轮廓线进行提取,轮廓线结构如图14b所示,采用多项式拟合的方法逆向提取轮廓参数,获得平滑曲线,爪趾外缘曲线Y1与内侧曲线Y2拟合结果如图14c所示,拟合方程为
Y1=4.52-7.31e-X1/1.98
(1)
Y2=4.68-16.94e-X2/2.47
(2)
仿生浅松铲铲柄刃口为浅松铲主要破土部件,铲柄刃口对土壤的犁削作用导致作业阻力较大,其破土方式与野兔前爪趾挖掘土壤动作相似,因此将野兔前爪趾轮廓曲线结构应用于浅松铲柄,设计仿生浅松铲铲柄,实现对浅松作业的减阻降耗。

图14 野兔爪趾结构Fig.14 Structure diagrams of hare claw toe
如图15a所示浅松铲结构,AB段为铲柄与机架连接部分,BC段为浅松铲破土刃口,CD段为铲尖安装部分。其中BC段采用仿生野兔前爪趾曲线设计,通过曲线修正,使BC段两端与AB段和CD段平滑连接,其中刃口截面为楔形设计,刃口夹角60°。浅松作业深度一般为100~150 mm,为了使浅松深度满足土壤水分垂直入渗的需要,作业深度D为150 mm,铲柄宽58 mm,厚30 mm,AB段长500 mm,铲柄采用65Mn钢制造,破土刃口BC段进行热处理,硬度为52 HRC[15]。铲柄实物如图15b所示。
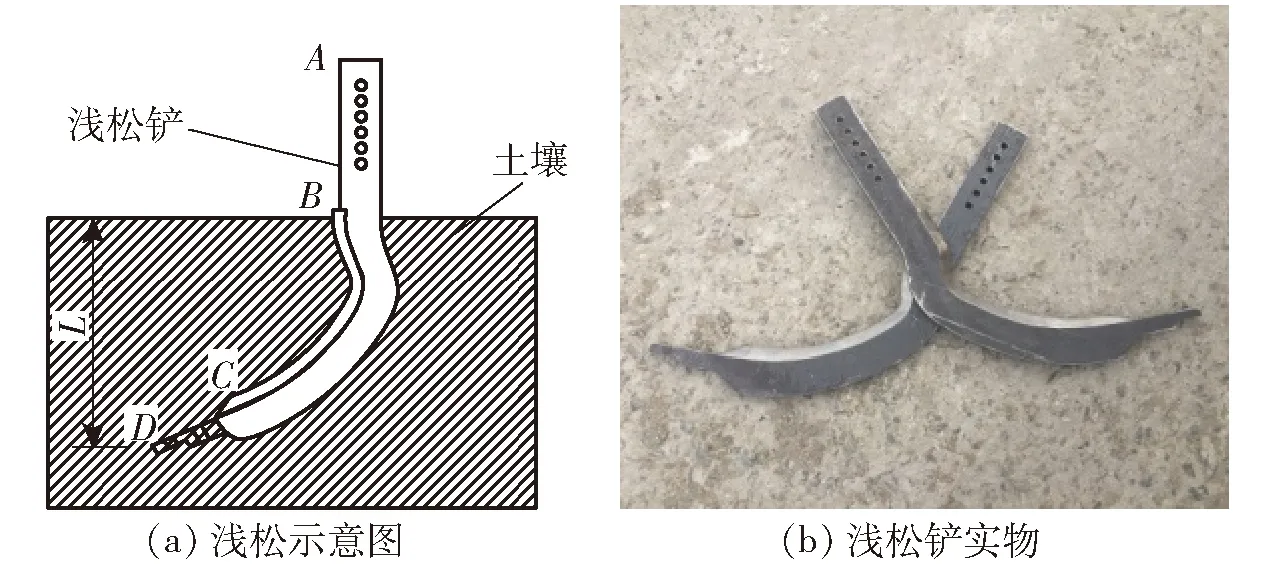
图15 浅松铲结构图Fig.15 Structure diagrams of shallow shovel
2.2.2扶垄铲铲尖耦合仿生设计
2BDB- 6(110)型大豆仿生智能耕播机工作过程中,除浅松铲铲柄持续对地表下土壤进行破土作业外,浅松铲铲尖与扶垄铲铲尖均以一定的入倾角犁削土壤,其中浅松铲铲尖作业深度为150 mm,扶垄铲铲尖作业深度为150 mm,二者作业持续与深层土壤接触,作业阻力较大,对整机作业功耗产生影响,两种铲尖具有相似的外形结构,因此对二者进行减阻设计,以达到减小作业阻力、降低整机作业功耗的目的。
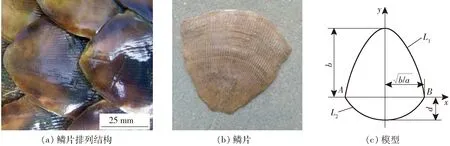
图16 穿山甲鳞片结构Fig.16 Structure diagrams of pangolin scale
研究表明,穿山甲的鳞片为波形体表结构,鳞片体表宏观凹凸不平,如图16a所示,鳞片层叠排列[17],接触土壤时极易使凹处形成无土区,即使对于含水量较多的粘性土,也会使水膜不易连续,体表实际触土面积减小,从而降低了土壤的粘附力;对于含水率较少的粘性土,动物体表凹处不仅无土、少水,使水膜不连续, 并且易储满空气使动物体表与土壤表面间存在空气膜,既降低摩擦因数,又减少粘附。因此在设计浅松铲尖与扶垄铲尖的表面结构时,采用穿山甲鳞片的表面形态作为两铲尖的表面结构,以达到脱附减阻的目的[16]。
如图16b所示,对穿山甲鳞片单体轮廓进行逆向工程扫描提取,扫描曲线做近似处理,为使加工方便,对轮廓曲线平滑处理,处理结果如图16c所示,穿山甲鳞片轮廓曲线由上曲线L1和下曲线L2构成,其方程可表示为
y=ax2+b(a>0,b>0)
(3)
y=cx2+d(c<0,d<0)
(4)
式中a——L1的开口大小
b——L1的高度
c——L2的开口大小
d——L2的高度

根据浅松铲尖与扶垄铲尖的体积,选定a=0.053,b=37.5 mm,c=0.017 7,d=12.5 mm,鳞片厚度2 mm,鳞片单体间相互覆盖,相互覆盖面积50%[18],由于铲体表面结构较为复杂,为保证加工表面精确度与强度,加工方式选择砂型铸造,材料成分选择QT450- 10球墨铸铁,球化剂为稀土镁合金,采用电磁感应炉进行熔炼,铸件成形后表面水洗和喷砂清理,扶垄铲尖的耦合仿生减阻表面如图17所示。

图17 耦合仿生减阻表面Fig.17 Coupling bionic anti-drag surface
3 田间试验
3.1 试验内容和方法
3.1.1试验条件
试验时间为2017年5月和10月,试验地点为黑龙江省勃利县试验基地(北纬45°45′48.82″,东经130°31′28.41″),试验现场如图18所示。试验地属于东北黑土区,前茬作物为玉米,在上一年的秋季进行灭茬。试验前的土壤物理性质如表2所示。

图18 田间试验现场Fig.18 Field test site
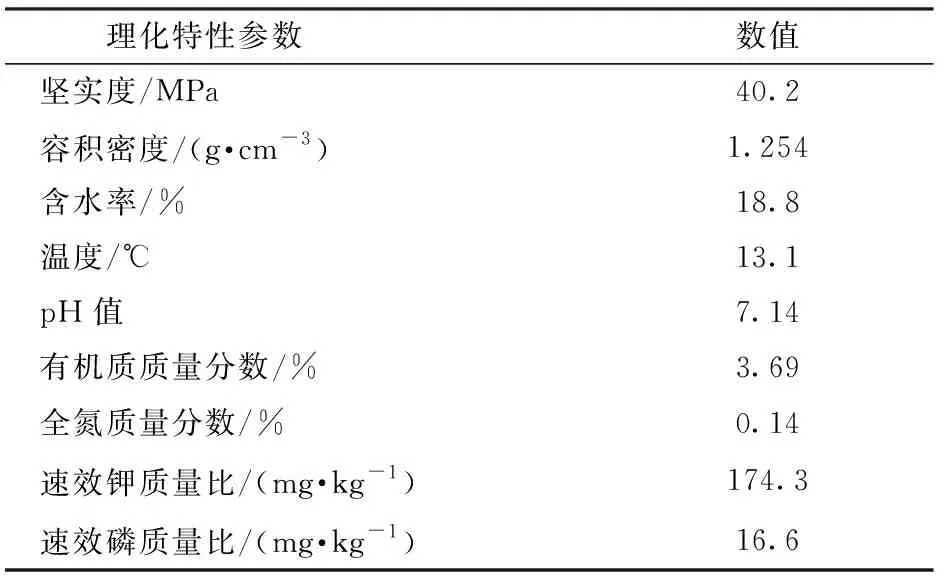
理化特性参数数值坚实度/MPa40.2容积密度/(g·cm-3)1.254含水率/%18.8温度/℃13.1pH值7.14有机质质量分数/%3.69全氮质量分数/%0.14速效钾质量比/(mg·kg-1)174.3速效磷质量比/(mg·kg-1)16.6
试验主要仪器设备:凯斯2104型拖拉机(动力为154 kW,最大行进速度为40 km/h)、2BDB- 6(110)型大豆仿生智能耕播机、SC- 900型土壤紧实度仪、TDR300型土壤水分测试仪、曲管地温计、耕深尺、环刀组件(容积100 cm3)、卷尺、电子天平等。
3.1.2试验方法
试验分为2部分:单因素对比试验,分别研究仿生浅松扶垄耕整机构对耕种层土壤温度的影响和减阻效果,以及镇压力实时监控系统对耕种层土壤含水率的影响;双因素参数优化试验,确定耕播联合作业最优参数组合,并进行最优参数对比验证试验。在两部分试验中,2BDB- 6(110)型大豆仿生智能耕播机共使用5种作业形态,分别进行5种作业:①2BDB- 6(110)型大豆仿生智能耕播机进行正常耕播联合作业(S1)。②去掉仿生耕整机构进行播种作业(S2)。③去掉仿生耕整机构,安装传统浅松铲和扶垄铲进行耕播联合作业(S3)。④关闭镇压力监控系统进行耕播联合作业(S4)。⑤去掉仿生耕整机构并关闭镇压力监控系统进行播种作业(S5)。
单因素对比试验时,将试验田平均分为4块(A1、A2、A3和A4),每块试验田有24条垄,垄高为300 mm、垄宽为1 100 mm、每垄长为200 m。机具S1、S2、S3和S4分别在地块A1、A2、A3和A4内进行作业,通过测量S1和S2作业后不同深度的土壤温度,探索浅松、起垄和播种联合作业对土壤温度的影响规律;通过测量S1和S3的作业阻力,验证仿生结构设计对耕整机构的减阻效果;通过测量S1和S4的镇压强度及平均土壤含水率(0~100 mm),探究镇压力自动调节装置的作业效果,以及对耕种层土壤含水率的影响规律。
参数优化试验时,以浅松深度和镇压强度为试验因素,以平均土壤温度(0~450 mm)、平均土壤含水率(0~100 mm)以及大豆平均出苗时间为试验指标,试验因素编码如表3所示。运用Design-Expert软件中3-Level Factorial Design响应曲面设计法,共进行13组试验,其中9组为析因点,4组为零点以估计误差,并对试验结果进行分析,检验各因素对试验指标的显著性影响和各因素之间是否具有交互作用,并得出响应曲面和回归方程,优化出各因素的最佳参数组合;最后将所得耕播联合作业最优参数组合与传统播种作业进行验证性对比试验,试验前,将试验田平均分为2块(A5和A6),每块试验田有24条垄,垄高300 mm、垄宽1 100 mm、每垄长为200 m。机具S1和S5分别作业于试验田A5和A6,验证最优作业参数组合条件下,耕播联合作业相对于传统播种作业对大豆发育的促进效果(土壤温度、土壤含水率、大豆出苗时间、大豆产量)。
试验所选用大豆种子为黑河52,种植模式为大垄四行种植模式,行距110 mm、株距90 mm、种植密度为390 000株/hm2,播种施肥情况为尿素、磷酸二铵、氯化钾3种常用肥混施,N、P、K质量比为1∶2∶0.5。
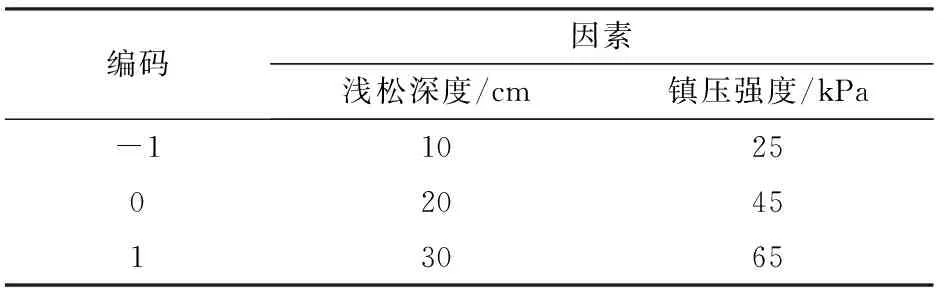
表3 因素编码Tab.3 Coding of factors
3.1.3试验指标测试方法
(1)土壤温度:播种作业后,于试验小区的对角线上,随机取样5点,于每个测定点处使用曲管地温计对不同处理的土壤温度进行测定,测定层次为地表(0 cm)及地下5、10、15、20、25、30、35、40、45 cm深处的温度,测定时间为每天06:00—18:00,每隔1 h测量一次温度,取白天平均温度为日平均温度,连续观测一个月[19],取每层次5个测定点的月平均温度作为该层次温度,取10个层次5个测定点的月平均温度为0~450 mm平均土壤温度。
(2)牵引阻力测试:主要测试仿生减阻浅松铲与仿生扶垄铲铲壁结构对整机减阻性能的影响,主要以S1和S3两种机具的牵引阻力进行对比,阻力测试仪器为上海高灵传感系统工程有限公司生产的GLBLZ柱式拉压力传感器。测力传感器一侧与拖拉机连接,另一侧与作业机具的机架相连接,所测阻力为整机作业阻力。使用农机动力学参数遥测仪记录采集的数据,记录频率1 Hz,拖拉机工作速度为4.5 km/h。
(3)大豆平均出苗时间:大豆出苗后,每两天观测一次,直到大豆出苗期结束不再有新苗长出为止。分别记录每块试验田内两条垄上5 m内的苗数,每块试验田重复测量3次,据此可计算出大豆平均出苗时间。平均出苗时间计算公式为[20]
(5)
式中N——从上一个时间点算起的出苗数
T——播种后的天数,d
(4)平均土壤含水率(0~100 mm):于土壤温度测定点上使用TDR300型土壤水分测试仪测定其0~100 mm处的土壤含水率,重复测量3次,取其平均值作为此点的平均土壤含水率(0~100 mm)。取5点的平均值作为试验小区平均土壤含水率(0~100 mm),测量时间为苗期开始到出苗期结束。
(5)镇压强度标准差:镇压强度标准差值反映了镇压强度的波动离散程度,可用于测定镇压作业稳定性。分别测定预设镇压强度为35、45、55 kPa下的实际镇压强度值,每秒记录一次,记录20 s,并计算镇压强度标准差。
(6)大豆产量:在大豆成熟时,每个小区连续取10株,风干后统计大豆单株粒数、百粒种子质量以计算理论产量,理论产量计算公式为
(6)
式中Y——理论产量,kg/hm2
r——平均行距,m
D——平均株距,m
S——株粒数,粒
W——种子百粒质量,g
3.2 田间试验结果与讨论
3.2.1单因素对比试验结果与讨论
3.2.1.1仿生浅松扶垄耕整机构对耕种层土壤温度的影响和减阻效果
如图19所示,根据试验结果可知:
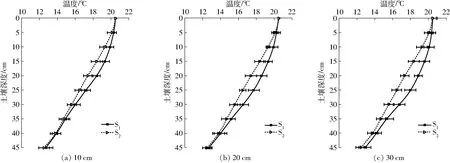
图19 浅松深度对土壤温度的影响试验结果Fig.19 Test results of effect of shallow loosening depth on soil temperature
(1)S1和S2模式下的土壤温度均随着深度的递增而保持一定幅度的下降,主要原因为土壤浅层的垂直温度梯度比空气大,土壤热容量比空气约大1 000倍,大部分热量被土壤耕种层吸收,而深处的热通量大为减弱,因此两种作业模式下的土壤温度梯度均随深度增加而减小[21-22]。

图20 浅松深度对牵引阻力的影响试验结果Fig.20 Test results of effect of shallow loosening depth on tractive drage
(2)在任一浅松作业深度(10、20、30 cm)条件下,S1和S2作业模式对地表土壤(深度0 cm)温度无显著性影响,说明地表温度主要受外部环境影响。在浅松作业深度为10 cm时,S1相较于S2作业模式,显著提升了5~25 cm深度范围内的土壤温度,但在30~45 cm深度范围内无显著性差异;在浅松作业深度为20 cm时,S1相较于S2作业模式,显著提升了5~35 cm深度范围内的土壤温度,但在40~45 cm深度范围内无显著性差异;在浅松作业深度为30 cm时,S1相较于S2作业模式,显著提升了5~35 cm深度范围内的土壤温度,但在40~45 cm深度范围内无显著性差异。土壤深度为20 cm时,3种浅松作业深度模式下S1相较于S2作业模式的土壤温度提升效果最为显著,分别提升1.0、1.2、1.5℃。上述结果说明,浅松作业可有效提高一定范围内的土壤孔隙度,加速土壤内部与外部环境间的物质能量交换[23],进而更有效地吸收外部热量,将热能传递至作业深度下方一定范围内的土壤,因此浅松作业深度越大,温度得到提升的土壤深度范围越大。但当土壤深度达到40 cm时,土壤热通量大为减弱,超出地表热能传递范围,因此持续增加浅松作业深度并不能提升40 cm以上深度的土壤温度。
如图20所示,根据试验结果可知:
(1)耕播联合作业时,作业阻力会在初始阶段迅速提升至峰值后,逐渐趋于平稳,说明浅松起垄部件刚与土壤接触时,土壤对触土部件的载荷较小,土壤产生弹性变形,当载荷逐渐增加至超过土壤的弹性极限时,土壤开始进入塑性变形阶段,随着浅松铲和起垄铲不断前进,土体所承受载荷继续增加进而开始屈服但并未被破坏,此时土壤开始出现硬化现象,耕作阻力达到最大值(图中峰值),此时凝聚力结合键被破坏,土壤发生初始失效,并开始出现软化效应,强度降低,对浅松铲和扶垄铲的阻力逐渐变小并趋于稳定。
(2)在相同浅松深度条件下,S1牵引阻力峰值明显低于S3(P<0.05),且S3可以更快地达到峰值,随着浅松深度的提升,S1和S3的阻力峰值差距逐步加大,浅松深度为10 cm时,平均降低最大作业阻力0.54 kN,作业阻力峰值降低13.20%;浅松深度为20 cm时,平均降低最大作业阻力1.35 kN,作业阻力降低15.94%;浅松深度为30 cm时,平均降低最大作业阻力3.42 kN,作业阻力降低19.77%;因此S1相较于S3可降低作业阻力13%~20%。上述结果说明采用野兔爪趾结构可更快地破坏凝聚力结合键,加快土壤失效,因此其阻力峰值更小。采用穿山甲鳞片仿生结构表面具有更好的减黏脱附效果,打破了土壤与铲体表面接触时形成的水膜的连续性,降低了土壤的粘结力,从而降低土壤对铲体表面的粘附,减小了耕整机构与土壤之间的摩擦力。
3.1.2.2镇压作业稳定性及平均土壤含水率(0~100 mm)试验结果与讨论
镇压作业稳定性可由镇压强度值随时间变化的波动程度(镇压强度标准差)所反映,镇压强度标准差越小,说明镇压作业稳定性越高,对播种行土壤的镇压效果越好。如图21和表4所示,在预设3种镇压强度(35、45、55 kPa)下,S1镇压强度随时间的波动变化程度均低于S4,说明S1镇压作业稳定性高于S4,镇压质量更高,说明S1模式下镇压力自动调节装置可实时监测镇压力值,并通过镇压力调节装置调节镇压力,从而提高了镇压作业的稳定性,进而保证了镇压质量。随着预设镇压强度的增加,S1和S4的波动变化程度和标准差均有所提高,这是由于镇压强度越大,仿形弹性镇压辊对播种行表层土壤的压实程度越高,受不同坚实度的表层土壤影响程度越高造成的。

图21 镇压作业稳定性试验结果Fig.21 Test results of compaction intensity stability

图22 平均土壤含水率(0~100 mm)试验结果Fig.22 Test results of average soil water content (0~100 mm)
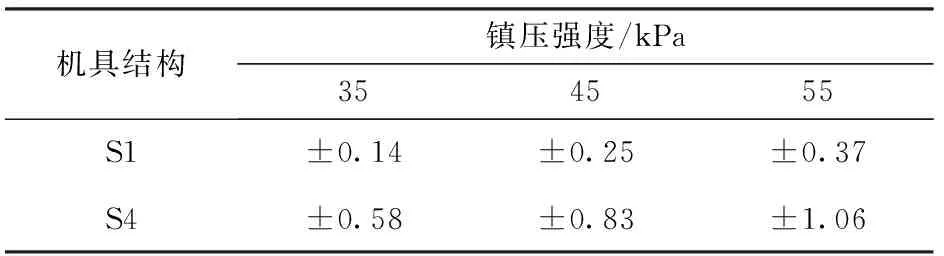
机具结构镇压强度/kPa354555S1±0.14±0.25±0.37S4±0.58±0.83±1.06
如图22所示,在相同的试验条件下,S1模式对平均土壤含水率(0~100 mm)有显著性的提升作用,如当镇压力水平为45 kPa时,S1相较于S4可提高土壤平均含水率(0~100 mm)1.36%,第15天时最为显著,相较于S4模式土壤含水率提升1.9%。说明镇压作业的高稳定性,可显著增加土壤蓄水保墒能力。
3.2.2参数优化试验结果与讨论
3.2.2.1参数优化试验结果
以各影响因素编码值为自变量,以平均土壤含水率(0~100 mm)、平均土壤温度(0~450 mm)以及大豆平均出苗时间为响应指标,试验结果如表5所示,X1、X2为浅松深度与镇压强度编码值。
上述试验结果经Design-Expert 软件处理分析后可得平均土壤含水率(0~100 mm)、平均土壤温度(0~450 mm)以及大豆平均出苗时间的方差分析结果,如表6所示。
对表6的数据进行二次多元回归拟合,得到平均土壤含水率(0~100 mm)、平均土壤温度(0~450 mm)以及大豆平均出苗时间对自变量编码值的二次多元回归方程分别为
Y1=18.29-0.99X1+1.03X2-0.65X1X2
(7)
Y2=16.79+0.28X1-0.25X2-0.3X1X2
(8)

(9)
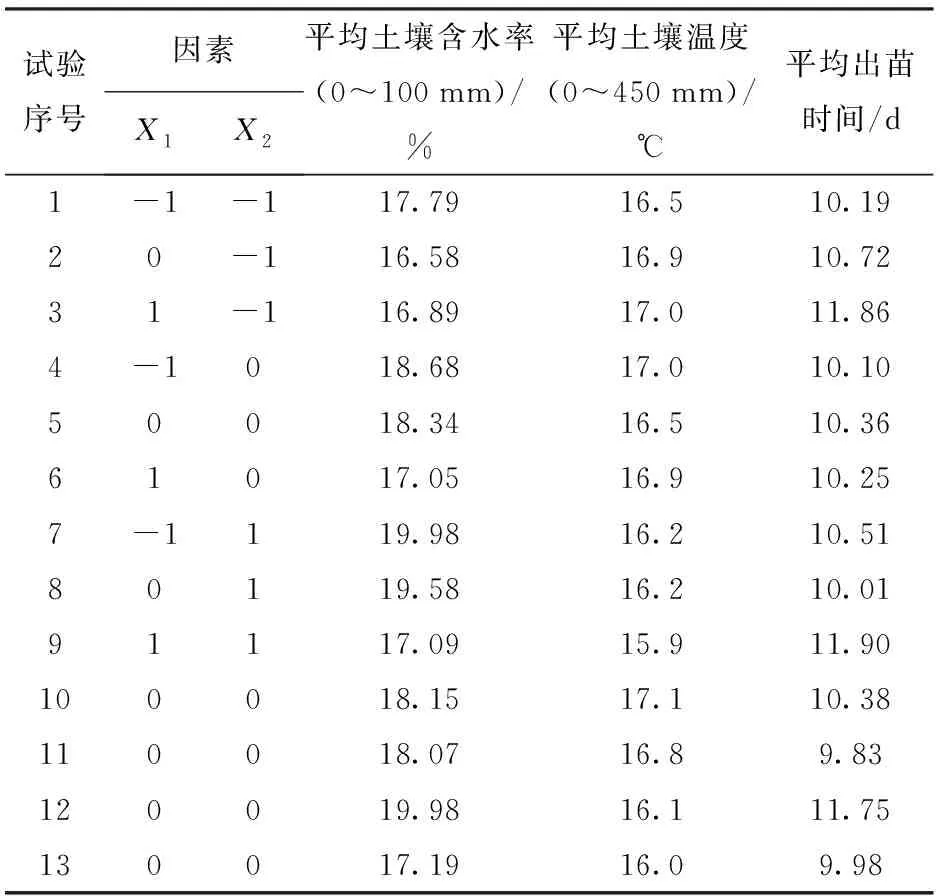
表5 响应曲面试验设计与结果Tab.5 Experiment design and result of responsesurface analysis
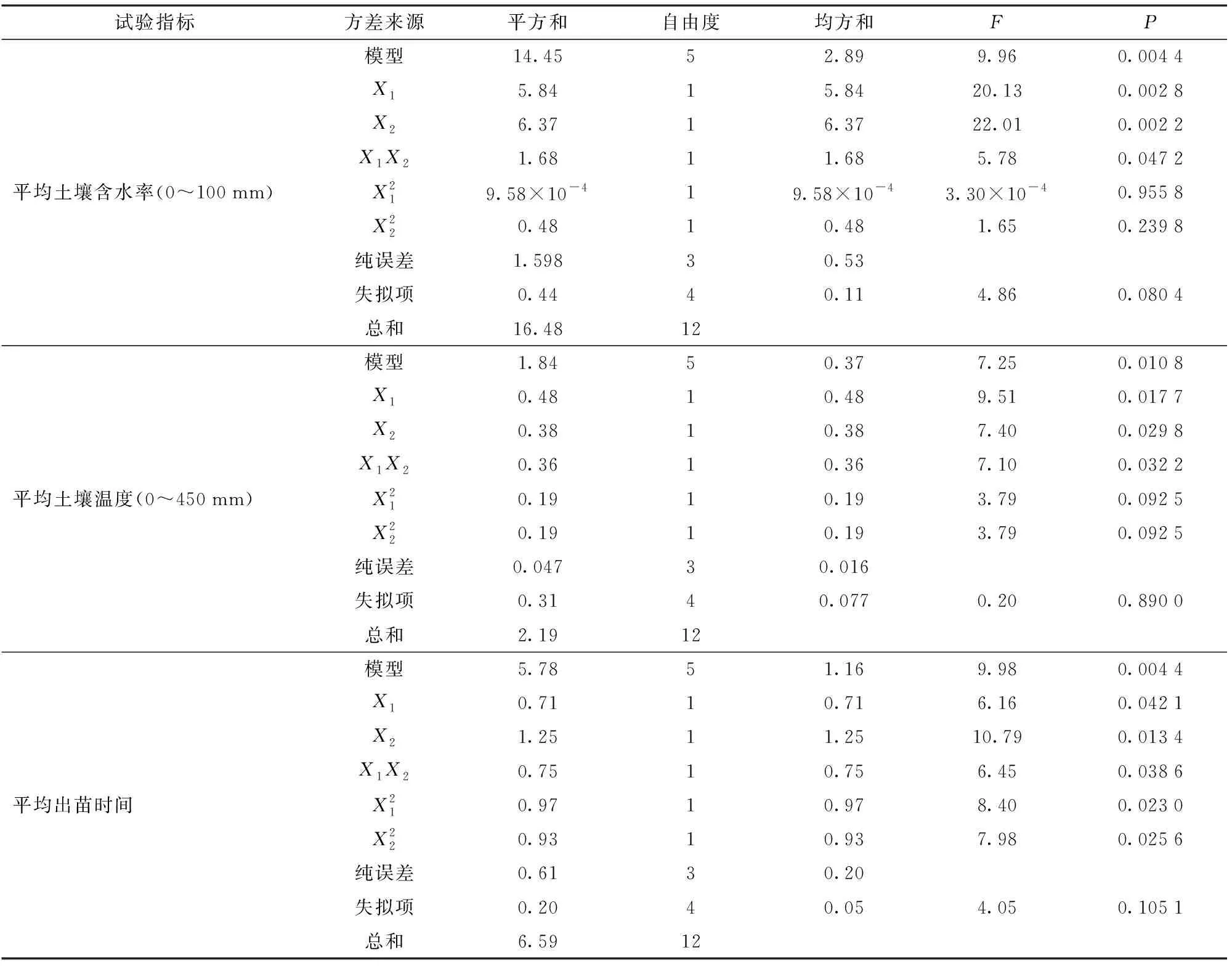
表6 正交试验方差分析Tab.6 Variance analysis of orthogonal test
平均土壤含水率(0~100 mm)对自变量编码值的二次多元回归方程,回归诊断显示,因素X1、X2、X1X2对平均土壤含水率(0~100 mm)的影响均为显著项(P<0.05)。失拟项P值为0.080 4,显然P>0.05,回归方程不失拟。决定系数与校正决定系数均接近于1,表明回归方程拟合度很高,精密度值为11.03(大于4),表明该回归方程在设计域内预测性能良好。各因素对平均土壤含水率(0~100 mm)显著性的影响由大到小为:镇压强度、浅松深度。
平均土壤温度(0~450 mm)对自变量编码值的二次多元回归方程,回归诊断显示,因素X1、X2、X1X2对平均土壤温度(0~450 mm)的影响均为显著项(P<0.05)。失拟项P值为0.890 0,显然P>0.05,回归方程不失拟。决定系数与校正决定系数均接近于1,表明回归方程拟合度很高,精密度值为7.629(大于4),表明该回归方程在设计域内预测性能良好。各因素对平均土壤温度(0~450 mm)显著性的影响由大到小为:浅松深度、镇压强度。

3.2.2.2参数优化试验结果分析与讨论
应用响应曲面法分析2个因素对试验指标的影响和交互作用,并运用Matlab软件对Design-Expert软件求出的回归方程进行寻优,得出最佳参数组合。
由图23a和式(7)可知,两因素均对平均土壤含水率(0~100 mm)具有显著性影响(P<0.01),且两者之间具有交互作用。平均土壤含水率(0~100 mm)随着浅松深度的增加而下降,且下降趋势逐步减缓;随着镇压强度的提高而上升,且上升趋势逐步减缓。由图23b和式(8)可知,两因素均对平均土壤温度(0~450 mm)具有显著性影响(P<0.01),且两者之间具有交互作用。平均土壤温度(0~450 mm)随着浅松深度的增加而上升,且上升趋势逐步减缓;随着镇压强度的提高,平均土壤温度(0~450 mm)先上升而后下降。由图23c和式(9)可知,两因素均对大豆平均出苗时间具有显著性影响(P<0.01),且两者之间具有交互作用。随着浅松深度的增加,大豆平均出苗时间先下降而后上升;随着镇压强度的提高,大豆平均出苗时间先下降而后上升。
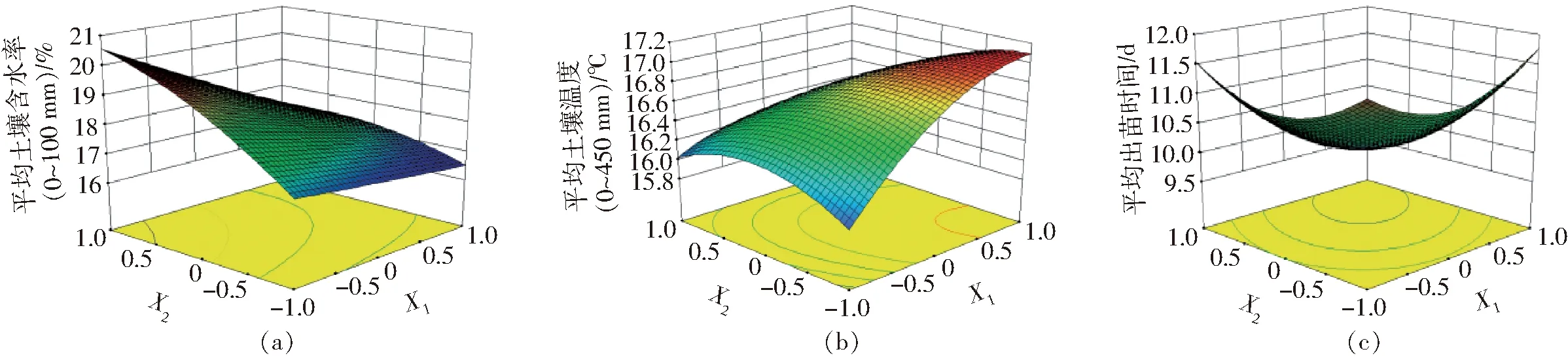
图23 各因素对试验指标影响的响应曲面Fig.23 Response surfaces influenced by various factors on test index
依据试验结果分析以及模型拟合,运用Matlab软件对式(9)进行寻优求解,以出苗时间最早为主要寻优指标,获得最优参数取值方案及对应结果:浅松深度为20.0 cm,镇压强度为48.2 kPa,平均土壤含水率(0~100 mm)为18.07%,平均土壤温度(0~450 mm)为16.5℃,平均出苗时间为9.84 d。因此最终选取的最优参数组合为:浅松深度为20 cm,镇压强度取整数为48 kPa。
3.2.2.3对比验证试验
依照最优方案参数组合,进行田间对比验证试验。机具S1于试验田A5作业,参数设置为浅松深度20 cm,镇压强度48 kPa,机具S5于试验田A6作业,参数设置为镇压强度48 kPa,机具S1和S5作业速度均为6 km/h。测得2块试验田的平均土壤含水率(0~100 mm)、土壤温度、平均出苗时间(按照式(5)的方法,每块试验田重复测量3次)试验结果如图24所示。由对比验证结果可知,采取最优组合方案的S1模式相较于S5模式可提升平均土壤含水率(0~100 mm)0.47%,分别提升10、20、30 cm深度土壤温度0.7、1.3、0.9℃,缩短出苗时间0.52 d。S1模式下平均出苗时间为9.55 d,相较于软件优化结果的9.84 d有所缩短,主要是因为验证试验是在第2部分试验结束之后进行,此时气温已有所提高,因而缩短了出苗时间。2017年10月,按照式(6)对大豆产量进行测定,测得S1模式下大豆产量为2 491 kg/hm2,S5模式下大豆产量为2 440.95 kg/hm2,大豆产量提高2.05%,大豆产量的提高是由于土壤温度和含水率的提升促进了大豆根系发育,提高了根系吸收营养与能量的能力;同时出苗时间的缩短延长了大豆生长时间,提高了全生育期光能利用率,利于植株干物质积累和生长发育,从而提高了大豆产量。

图24 对比验证试验结果Fig.24 Result of contrast and validation test
4 结论
(1)浅松扶垄作业可有效提升一定深度范围内的土壤温度,浅松作业深度为10 cm时,可显著提升5~25 cm深度范围内的土壤温度;浅松作业深度为20 cm和30 cm时,可显著提升5~35 cm深度范围内的土壤温度,但当土壤深度达到40 cm以上时,土壤热通量大为减弱,超出地表热能传递范围,浅松扶垄作业对土壤温度的提升效果已不显著。
(2)设计的仿生浅松扶垄耕整机构相较于传统耕整机构可显著降低作业阻力,其采用的野兔爪趾结构可更快地破坏凝聚力结合键,加快土壤失效;采用的穿山甲鳞片仿生结构表面具有更好的减黏脱附效果,打破土壤与铲体表面接触时形成的水膜的连续性,减低土壤的黏结力,从而降低土壤对铲体表面的粘附,减小了耕整机构与土壤之间的摩擦力。浅松深度为10 cm时,作业阻力降低13.20%;浅松深度为20 cm时,作业阻力降低15.94%;浅松深度为30 cm时,作业阻力降低19.77%。
(3)设计的镇压力自动调节装置可显著减小作业过程中镇压力的波动,从而提升镇压作业的稳定性,具有更好的蓄水保墒效果。当镇压强度为45 kPa时,其平均土壤含水率(0~100 mm)最大为第21天的19.23%,最小为第27天的18.12%,相较于传统镇压装置可提高平均土壤含水率(0~100 mm)1.36%。
(4)浅松深度和镇压强度均对土壤温度和含水率具有显著性影响(P<0.05),且两者之间具有交互作用。平均土壤含水率(0~100 mm)随着浅松深度的增加而下降,随着镇压强度的提高而上升;平均土壤温度(0~450 mm)随着浅松深度的增加而上升,随着镇压强度的提高,先上升而后下降;大豆平均出苗时间随着浅松深度的增加,先下降而后上升,随着镇压强度的提高,先下降而后上升。运用Design-Expert和Matlab软件对耕播联合作业的浅松深度和镇压强度进行参数优化,确定耕播联合作业最优参数组合为:浅松深度为20 cm,镇压强度取整数为48 kPa,在该参数组合下,浅松、扶垄、播种联合作业相较于传统播种作业可提升平均土壤含水率(0~100 mm)0.47%,分别提升10、20、30 cm深度土壤温度0.7、1.3、0.9℃,缩短大豆平均出苗时间0.52 d,提高大豆产量2.05%。
1 薛庆喜. 中国及东北三省30年大豆种植面积、总产、单产变化分析[J]. 中国农学通报, 2013, 29(35):102-106.
XUE Qingxi.Analysis on the change of 30 year’s soybean areas, production and yield in China and Northeast China[J]. Chinese Agricultural Science Bulletin, 2013, 29(35):102-106. (in Chinese)
2 HOLEN N M, WAR S M. Quantification of water storage in fingers associated with preferential flow in milled peat stockpiles[J]. Soil Science Society of America Journal,1999, 63(3): 480-486.
3 JABRO J D, STEVENS W B, IVERSEN W M, et al. Tillage depth effects on soil physical properties, sugarbeet yield, and sugarbeet quality[J]. Communications in Soil Science and Plant Analysis, 2010, 41(7): 908-916.
4 单成钢, 朱彦威, 倪大鹏, 等.丹参垄作对土壤耕层温度的影响[J]. 作物杂志, 2012(1):118-121.
SHAN Chenggang, ZHU Yanwei, NI Dapeng, et al.Effect ofSalviamiltiorrhizaridge culture on soil temperature[J]. Crops, 2012(1): 118-121.(in Chinese)
5 王旭清, 王法宏, 任德昌, 等. 作物垄作栽培增产机理及技术研究进展[J]. 山东农业科学, 2001(3): 41-45.
WANG Xuqing, WANG Fahong, REN Dechang, et al. Cropping cultivation mechanism and technology research progress of ridge cultivation[J].Shandong Agricultural Sciences,2001(3): 41-45. (in Chinese)
6 何进, 李洪文, 张学敏, 等. 1QL- 70型固定垄起垄机设计与试验[J]. 农业机械学报, 2009, 40(7): 55-60.
HE Jin, LI Hongwen, ZHANG Xuemin, et al. Design and experiment of 1QL- 70 bed former for permanent raised beds[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(7): 55-60.(in Chinese)
7 ASARE S N,RUDRA R P,DICKINSON W T,et al. Soil macroporosity distribution and trends in a no-till plot using a volume computer tomography scanner[J]. Journal of Agricultural Engineering Research, 2001, 78(4): 437-447.
8 TASER O F, KARA O. Silage maize (ZeamaysL.) seedlings emergence as influenced by soil compaction treatments and contact pressures[J]. Plant, Soil and Environment, 2005, 51(7): 289-295.
9 任露泉, 李建桥, 陈秉聪. 非光滑表面的仿生降阻研究[J]. 科学通报, 1995, 40(19):1812-1814.
REN Luquan, LI Jianqiao, CHEN Bingcong.Research on drag reduction of blades with bionic non-smooth surfaces[J]. Chinese Science Bulletin, 1995, 40(19): 1812-1814.(in Chinese)
10 马付良, 曾志翔, 高义民,等. 仿生表面减阻的研究现状与进展[J]. 中国表面工程, 2016, 29(1): 7-15.
MA Fuliang, ZENG Zhixiang, GAO Yimin,et al. Research status and progress of bionic surface drag reduction[J].China Surface Engineering,2016, 29(1): 7-15.(in Chinese)
11 贾洪雷, 李杨, 齐江涛, 等.基于ZigBee的播种行表层土壤坚实度采集系统[J/OL]. 农业机械学报, 2015, 46(12):39-46, 61.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20151206&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.12.006.
JIA Honglei, LI Yang, QI Jiangtao,et al. Design and test of soil compaction acquisition system for sowing line surface based on ZigBee[J/OL]. Transactions of the Chinese Society for Agricultural Machinery,2015, 46(12):39-46, 61.(in Chinese)
12 黄东岩, 朱龙图, 贾洪雷, 等.基于压电薄膜的免耕播种机播种深度控制系统[J/OL]. 农业机械学报, 2015, 46(4):1-8.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150401&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2015.04.001.
HUANG Dongyan, ZHU Longtu, JIA Honglei,et al.Automatic control system of seeding depth based on piezoelectric film for no-till planter[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(4):1-8.(in Chinese)
13 龚皓晖,王霜.仿生深松铲结构设计与有限元分析[J].农机化研究,2013,35(7):53-57.
GONG Haohui, WANG Shuang. Bionic subsoiler structural design with the finite element analysis[J]. Journal of Agricultural Mechanization Research,2013,35(7):53-57.(in Chinese)
14 FRESCHI P, FASCETTI S, MUSTO M, et al. Seasonal variation in food habits of the Italian hare in a south Apennine semi-natural landscape[J]. Ethology Ecology & Evolution, 2016, 28(2): 148-162.
15 张金波,佟金,马云海.仿生减阻深松铲设计与试验[J/OL].农业机械学报,2014,45(4):141-145.http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140422&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2014.04.022.
ZHANG Jinbo, TONG Jin, MA Yunhai. Design and experiment of bionic anti-drag subsoiler[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(4): 141-145.(in Chinese)
16 张毅,孙友宏,任露泉.钻头泥包的土壤动物仿生学分析研究[J].探矿工程(岩土钻掘工程),2003, 30(2):41-43.
ZHANG Yi, SUN Youhong, REN Luquan. Research on soil animals for the bionic analysis to abort bit bailing[J]. Exploration Engineering, 2003, 30(2): 41-43. (in Chinese)
17 MEYER W, LIUMSIRICHAROEN M, SUPRASERT A, et al. Immunohistochemical demonstration of keratins in the epidermal layers of theMalayanpangolin(Manisjavanica), with remarks on the evolution of the integumental scale armour[J]. European Journal of Histochemistry, 2013, 57(3):172-177.
18 丛茜,任露泉,吴连奎,等.几何非光滑生物体表形态的分类学研究[J].农业工程学报,1992, 8(2):7-12.
CONG Qian, REN Luquan, WU Liankui, et al. Taxonomic research on geometric non-smooth animal surface shapes[J]. Transactions of the CSAE, 1992, 8(2): 7-12. (in Chinese)
19 RAMAKRISHNA A, TAM H M, WANI S P, et al. Effect of mulch on soil temperature, moisture, weed infestation and yield of groundnut in northern Vietnam[J]. Field Crops Research, 2006, 95(2): 115-125.
20 VOORHEES W B, EVANS S D, WARNES D D. Effect of preplant wheel traffic on soil compaction, water use, and growth of springwheat[J]. Soil Science Society of America Journal, 1985, 49(1): 215-220.
21 KANG S, HU X, GOODWIN I, et al. Soil water distribution, water use, and yield response to partial root zone drying under a shallow groundwater table condition in a pear orchard[J]. Scientia Horticulturae, 2002, 92(3): 277-291.
22 ARAGHI A, MOUSAVIBAYGI M, ADAMOWSKI J. Detecting soil temperature trends in Northeast Iran from 1993 to 2016[J]. Soil and Tillage Research, 2017, 174(12): 177-192.
23 TYLKOWSKI T, BUJARSKA-BORKOWSKA B. Effect of acorn size and sowing depth onQuercusroburandQ.petraeaseedling emergence and height[J]. Sylwan,2011, 155(3): 159-170.
猜你喜欢
中南林业科技大学学报(2022年11期)2023-01-12
西北林学院学报(2022年5期)2022-10-04
电力科技与环保(2022年3期)2022-07-15
林业机械与木工设备(2022年5期)2022-05-27
广西糖业(2022年1期)2022-03-31
土壤(2022年1期)2022-03-16
农业科技与信息(2021年24期)2022-01-05
昆明医科大学学报(2021年12期)2021-12-30
装备制造技术(2020年3期)2020-12-25
英语文摘(2020年10期)2020-11-26