切风模式风力发电飞行器的进展与挑战
2018-05-31 07:00王若钦严德李柳青万志强李道春
航空工程进展 2018年2期
王若钦,严德,李柳青,万志强,李道春
(北京航空航天大学 航空科学与工程学院,北京 100083)
0 引 言
随着风力发电技术的不断发展,人们逐渐意识到传统风力发电机利用低空风进行发电的局限性,并开始对高空风进行研究。C.L.Archer等[1]初步评估了地球表面0.5~12 km高度风的可用性;K.Marvel等[2]认为从大气中采集全世界实际需要的电力,不会对全球范围内的气候产生明显影响,因而高空风能领域在未来有巨大的发展潜力。主流的风力发电设备受到塔架的高度及发电机叶轮直径的限制,只能利用低空风能,高空巨大的风能资源尚未被有效地开发和利用,因此设计出高效可行的高空风能利用方案,具有十分重要的现实意义。
为了实现这一目标,高空风力发电系统(Airborne Wind Energy Systems,简称AWES)应运而生。AWES的概念最早出现于20世纪70年代,在近十余年中得到飞速发展,欧洲和美国已经取得了一些代表性成果,中国在该领域的研究尚处于起步阶段。AWES采用系留飞行器拖动地面发电机,或将发电机和叶轮直接安装在系留飞行器上的方式进行发电。系留缆绳的长度较为灵活,因此可以有效收集不同高度的风能。根据飞行器飞行原理的不同,AWES可分为切风模式(Crosswind Mode)和非切风模式两大类。切风模式要求飞行器按照给定轨迹在与地面接近垂直的平面内飞行,飞行器相对地面速度较高,从相对风中收集能量。而非切风模式下,飞行器像风筝一样停留在空中,相对地面速度较低,从绝对风中收集能量。Miles L.Loyd[3]证明了切风模式下收集的能量比非切风模式高2~3倍;M.Diehl[4]以A380作为发电平台进行估算,认为其在切风模式下发电功率可以高达34MW。因此切风模式是提高发电能力和经济效益的关键所在。
由于切风模式的发电能力较强,且涉及较多飞行器设计领域的难题,本文着重讨论采用切风模式的AWES,对其典型成果进行梳理,并就一些关键技术问题展开探讨,力图深化国内相关从业人员对AWES及切风模式的认识。
1 切风模式
1980年,Miles L.Loyd[3]首次提出了利用切风模式进行发电的概念。采用该模式飞行的飞行器大多将发电叶轮直接布置在飞行器机体上,在飞行器与来流的相对速度下进行发电。
切风模式是指飞行器在系留缆绳的约束下,在下风区沿圆周或“8字”轨迹进行可控的无动力飞行。由于其飞行轨迹平面与风向接近垂直,飞行器飞行时“切断”了风的流线,故命名为“切风”。其飞行轨迹如图1所示[5]。
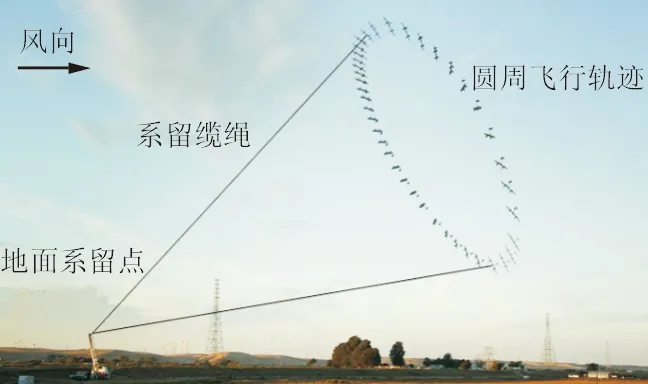
图1 Makani Power的验证机切风飞行圆周轨迹
从轨迹中取上升段某点进行受力分析。假设此刻飞行器静止,飞行器受风的作用,产生升力L和阻力D,同时还受到缆绳拉力T以及重力G,如图2所示。设x轴沿风速方向,y轴竖直向上,将飞行器受力在x、y轴上进行分解,可得
L=Tsinθ+G
(1)
D=Tcosθ
(2)

图2 切分模式受力示意图
将式(1)和式(2)联立后发现,只要满足L>Dtanθ+G,飞行器就能够借助风力上升或加速。当缆绳较长时,飞行区处于下风区较远位置,θ较小,只要飞行器升阻比较大,该条件很容易满足。
当飞行器处在轨迹上其他任意位置时,只需调整飞行器姿态角,均可达到图2所示状态,即在轨迹上各点都可以从风中获取能量,进而转化为电能。
在风的加速作用下,飞行器上的来流速度v远大于风速。由发电功率表达(式(3))可知:在空气密度ρ和发电机迎风面积A不变的情况下,随着来流速度v的增大,发电功率大幅提高。
(3)
在非切风模式下,飞行器地速较低,可假设来流速度v即为风速Vw。而在切风模式下,来流速度为风速和飞行器地速的叠加,飞行器地速通常远大于风速,则来流速度v大于风速Vw。因此,在相同条件下,切风模式相较于非切风模式有更高的输出功率。
2 切风模式高空风力发电系统发展现状
AWES(后文中所提到的AWES均为采用切风模式的AWES)通常包括地面系统和飞行器两部分,地面系统通过至少一根缆绳与飞行器(多为滑翔机、经特殊设计的大型风筝等)连接。AWES分为陆基和空基两类[6]。
2.1 陆基高空风力发电系统
陆基AWES的能量转换过程在地面进行,飞行器上的缆绳连接到地面发电机主轴传递牵引力。由飞行器在风力作用下的爬升运动拉动发电机旋转从而产生电能,其飞行轨迹多为圆周轨迹或“8”字轨迹,如图1和图3所示[7]。

图3 TU Delft的验证机切风飞行“8”字轨迹
非切风模式下,飞行器在空中像风筝一样保持姿态不变;切风模式下,飞行器的运动会产生更大的相对风速,从而提升飞行器升力,增大作用在缆绳上的拉力,进而拉动发电机产生更高的输出功率。达到一定高度后,飞行器通过特殊操纵降低高度回到初始位置,缆绳重绕,进入下一个循环。系统在发电过程中产生的能量必须大于在回收过程消耗的能量,才能有效地输出电能,这需要借助对飞行器的精确控制实现。在飞行过程中,控制系统通过调节缆绳的拉力、飞行器舵面偏转角度或改变飞行器外形,控制飞行器的姿态及飞行轨迹,使得系统在整个飞行过程中的发电功率得到优化[8-9]。
下文对陆基AWES中的一些典型成果进行介绍。
(1) KiteGen
意大利的KiteGen是最先研究陆基高空风力发电系统的公司之一。该公司采用前缘为刚性的风筝作为飞行器进行发电,由连接在地面站的两根缆绳进行控制[10],并专门研发了可承受更大拉力的特殊缆绳[11]。该公司在2006年成功研制出了第一代原型机[12]。该公司为大功率发电系统所研发的巨型风筝如图4所示[13]。

图4 KiteGen的巨型风筝
巨型风筝的工作原理为:在起飞前,风筝倒挂在地面支撑杆的顶端,借助风力起飞,之后地面站通过控制连接在风筝两端的缆绳上张力,操纵风筝沿“8”字航线爬升,同时缆绳在风筝的拖动下,带动地面绞盘旋转从而带动发电机进行发电。为了最大程度地减少回收风筝时需要消耗的能量,该公司使用了一种特殊的机动动作[14]:突然撤除一根缆绳的力,令风筝迅速进入失速状态,此时以相同的速度迅速收回两根缆绳,风筝则会保持一侧朝下的状态飘落。该过程中消耗能量的功率可以由缆绳回收速度乘以风筝阻力得到,仅占发电过程中发出能量的很小一部分。在缆绳收回到一定程度后,一个发电循环结束,另一个新的循环开始。
(2) Ampyx Power
荷兰的Ampyx Power[15-16]是研制陆基AWES的机构中第一个使用滑翔机作为飞行器的公司,也是少数几家已经实现起飞-发电-降落全过程自动化的公司之一。其飞机采用碳纤维机体和碳纤维梁,搭载先进的自驾系统,滑翔机和地面站内的绞盘之间由一根缆绳连接。起飞前飞机面向地面站停放在数十米外,起飞时绞盘迅速收绳拉动飞机移动,达到一定速度后升空。飞机的发电过程与前述风筝类似,降落时则与滑翔机类似,在飞机上设计了拦阻装置,降落到一定高度和一定位置时,会被地面回收装置捕获。2012年,该公司在AP1型验证机上实现了平均6 kW、峰值15 kW的全自动稳定发电过程,2015年在AP2型验证机(如图5所示[7])上实现了全自动起降,并对系统的实用性和经济性进行了评估[17-18]。目前Ampyx Power正在最后一型验证机(AP3)上进行全自动起降及发电测试,2020年起将着手开展第一款商用型号AP4的试验工作,其设计功率达到2 MW,并计划在海上投入使用。

图5 Ampyx Power的AP2验证机
(3) SkySails Power
德国的SkySails Power是SkySails GmbH旗下的子公司,主要研发基于风筝原理的风力驱动系统,用于驱动货轮[19],并在风力驱动系统的技术基础上,研制陆基AWES。SkySails Power采用薄翼风筝(也称为冲压空气风筝)作为飞行器进行发电。该类风筝由多个自前缘延伸至后缘的细长单元组成,这些单元在飞行时充气膨胀以提供足够的刚度。该类风筝尺寸较大,且具有较高的气动效率。风筝由一根主缆绳牵引,主缆绳从地面延伸至风筝下方吊挂的控制吊舱,经过控制吊舱后分为多根,分别连接风筝两端,主缆绳内部布置电线,从地面为控制吊舱供电。控制吊舱通过控制连接风筝两端的缆绳的长度,实现对风筝的控制[20]。该公司为风筝设计了独特的起降装置[21],能够将整个风筝储存在其内部。该装置有一个伸缩式桅杆,桅杆顶部有一个锁定装置,能够抓住、锁定或释放风筝的前缘。当系统不工作时,风筝在存储仓里被压缩和放气。在起飞前,桅杆垂直伸出,把未充气的风筝带到大约离地面几米高的地方,给风筝充气使其变成发电时的外形。风筝直接借助风力起飞,之后控制吊舱开始操纵风筝沿“8”字航线切风飞行,待爬升到一定高度后回收至作业高度起点,开始下一个循环。该系统回收时是采用高速绞车在不改变迎角的情况下直接将风筝拖回,虽然耗能较多,但目前这种方式是更加实用的[22]。
(4) TU Delft
TU Delft的W.J.Ockels等是高空风力发电领域的先驱。他从1996年开始进行理论研究,将其设计申请了专利[23],并组建了团队,将研究推进到了原型机验证阶段[24]。
TU Delft从2010年开始对20 kW级别的发电系统进行研制和测试。其使用的风筝面积达到了25 m2,使用自动发射装置,在2012年成功实现了全自动运行。与SkySail公司的系统类似,该风筝采用单根主缆绳系留,空中控制吊舱配合多根操纵缆绳对风筝进行控制,不同在于TU Delft在回收阶段需对迎角进行控制[25]。目前,TU Delft正在研制面积为100 m2的全自动AWES,以及应用范围更广的小型AWES系统[26]。
2.2 空基高空风力发电系统
空基AWES的能量转换过程在空中进行,该类系统通常将风力发电机安装在飞行器上(桨叶平面垂直于来流),通过特定的操纵方式,可以使飞行器在风和缆绳的共同作用下,沿一定轨迹(通常为圆形航线或“8”字航线)循环飞行。飞行过程中空气来流推动叶轮转动发电,电能通过缆绳传送至地面系统。由于其飞行的连续性,除了在需要消耗能量的起飞和着陆期间不输出电能外,可在飞行的过程中持续地产生电能。
1980年,Miles L.Loyd首次提出在风筝上安装风力发电机进行切风飞行的构想[3],并申请了专利[27]。在Miles L.Loyd的构想中,飞行器是滑翔机和多旋翼的组合体,由系留缆绳约束,在风力和缆绳拉力的共同作用下,沿圆形轨迹做周期性往复运动。通过计算得出,这种模式比架设在地面的风力发电机的能量转换量高5倍。虽然简化了缆绳的影响因而高估了AWES的发电能力,但其设计还是为后续研究指明了方向,目前,发展出的各类AWES一部分是由Miles L.Loyd的设计演变而来的。
下文对空基AWES中的一些典型成果进行介绍。
(1) Makani Power
Makani Power[5]最忠实地延续了Miles L.Loyd的构想,在Loyd方案的原理基础上,研制出了全套发电系统。
1号验证机采用类似滑翔机的单翼单发布局,通过特制的导电缆绳将飞行器与地面相连,从地面弹射竖直弹射起飞,在该验证机上首次实现了持续稳定的切风飞行。2号验证机在机翼两侧加装了两个小型风力发电机,在切风飞行中成功实现电能输出。3号验证机采用了双工况发电机(在起降阶段作为电机提供推力,在正常飞行时作为发电机发电),实现了起飞、降落及切风飞行间的转换过程。
为了将前述功能进行融合,该公司设计了 “Wing 7”,实现了多种风力条件下的全自动起飞-发电-着陆过程,并研发了缆绳张力传感器、经气动设计的系留缆绳以实现系统的运行[28-29]。“Wing 7”翼展8 m,发电功率20 kW,左右机翼上共配备了4台双工况发电机。起降时间较短,因此虽然双工况发电机作为电机使用时的效率较低,但实际能量损失并不大。起飞时,飞行器悬停脱离地面台架,缓慢释放缆绳,飞行器在风力和电机推力作用下缓慢远离台架并上升,待到达合适位置后,飞行器进入圆形轨迹,随着速度提升,机翼逐渐加载,螺旋桨逐渐卸载变为发电机,飞行器沿圆形轨迹进行切风飞行并发电。着陆时,在轨迹上升段进行模式转换,发电机转换为电机提供推力,飞行器进入悬停状态,缓慢收回缆绳,将飞行器拖回台架。
目前Makani Power对28 m翼展、发电功率达到600 kW的商业级机型M600进行测试(如图6所示[7])。该飞机搭载8台发电机,每台配备5片桨叶,已于2016年12月成功进行了首次试飞。

图6 Makani Power的M600正在进行悬停实验
(2) Joby Energy
Joby Energy 成立于2008年,该公司的方案与Makani原理相似,最大的不同在于,其飞行平台是一个飞行的桁架,桁架上的每根“杆”都是一段翼面,在桁架的每个节点上都可以布置发电机。该公司为其设计申请了专利[30-32],并于2009~2010年对小型原理样机进行了试飞,自此之后便没有公开新的研究进展。该公司研发的小型验证机如图7所示[7]。

图7 Joby Energy的小型验证机
3 切风模式风力发电飞行器的关键问题
高空风力发电系统拥有巨大的发电潜力,因而吸引了国内大量科研人员及单位从事相关研究。郭井宽[33]研究了国内高空风力发电技术领域的专利分布情况,可以看出国内的相关研究主要集中在非切风模式AWES上,且尚处于起步阶段。
对于切风模式AWES的主要载体——切风飞行器,北京航空航天大学飞行器创新研究团队开展了部分研究。该团队试制了常规布局,翼展2 m,单一电机的验证机,如图8所示。该验证机采用了独特的侧向升力面设计,在航线顶端和底端补充部分升力,在保证能够沿航迹飞行的基础上,简化了操纵和控制系统。该验证机目前已经进行了圆形轨迹试飞,初步掌握了切风飞行的飞行原理,下一步还将继续推进后续研究。

图8 北京航空航天大学研制的小型验证机
结合国际上的研究进展和国内的初步探索,提出国内研究人员在后续研究中需要重点突破的关键技术。
3.1 低阻轻质系留缆绳技术
首先,需要关注的是缆绳的阻力问题。缆绳在空中随飞行器一起运动会产生空气阻力,运动速度越快,参与运动的绳长越长,阻力带来的能量消耗也越多。降低缆绳的阻力可有效提升飞行器的飞行速度和高度[34],为此有学者提出了“零缆绳阻力”的概念。P.R.Payne[35]提出了一种“跳舞飞机”构型,从地面站伸出一根主缆绳,缆绳顶端分出两根绳,分别连接两个在同一圆形轨迹上分别做切风飞行的飞行器,只有这两架飞机和两根较短缆绳处于运动状态,而最长的主缆绳相对地面是静止的,可大幅降低缆绳的阻力,但目前该方案还停留在理论阶段[36]。第二种方案提出了一种“多缆绳”概念[37],地面上有三台发电机伸出三根缆绳,三根缆绳的顶端系在一起,再从交点继续向上伸出一根缆绳,该缆绳顶端有一架飞行器做切风飞行。在飞行器飞行过程中,只有顶端的缆绳随飞行器一起运动,三根主缆绳不需要跟随飞行器旋转,只是张力呈周期性变化。上述两种概念的目标都是减少随飞行器运动的缆绳的长度,从而减少缆绳的阻力。此外,还可以通过对缆绳的截面形状进行设计从而减小缆绳阻力。
其次,要关注的是缆绳的重量问题。飞行器飞行高度越高,则缆绳越长,重量也越大,因而缆绳重量是限制飞行高度的主要因素之一。对于空基AWES来说,缆绳还要承担将机上产生的电能传输到地面的任务,增加缆绳导电功能会进一步增大单位长度缆绳的重量。对于陆基AWES来说,缆绳如果内部不导电,则可能在闪电产生的冲击电场中产生电火花[38],无法在雷雨天气工作的,如果对缆绳进行一些防静电处理,也会进一步增加缆绳重量。作为制约整个系统发电能力的关键因素,低阻轻质缆绳技术这一难题还有待进一步的研究与发展。
3.2 切风飞行器精确动力学建模与控制技术
AWES的发电功率随着飞行器升力系数的增大而增大[39]。因此,若能对飞行器姿态进行精确实时控制,使飞行器根据飞行状态对姿态进行实时调整,维持升力系数最大,则可以使总体发电功率最大化。对于任意一个AWES系统,飞行器与地面设备通过缆绳连接在一起,若要实现对飞行器的精确实时自动控制,则需要将系统作为整体进行分析。在进行动力学建模时,不能把缆绳简单的当作直线进行分析,要将缆绳的长度、重量、阻力、拉力及悬垂程度等因素考虑在内,因而对于缆绳受力特性的分析非常复杂[40];在研究控制方法时,需要将地面站里缆绳的收放作为一项控制量考虑在内。
在起降阶段,飞行器速度很低,其巨大的翼面对于风场的变化非常敏感,而低速时气动面操纵效果较差,尤其是对于需要采用特殊操纵进行回收的大型风筝,需要借助缆绳的快速收放实现对飞行器的操纵,因此,该阶段是最难实现自动控制的阶段。此外还需要对起降模式与切风飞行间过渡状态的控制方法,及控制系统在变化风场中的鲁棒性问题进行研究。
3.3 多功能随动基站设计与控制技术
集成了多种功能的地面基站是每一个AWES不可或缺的一部分,因而吸引了部分学者对其设计与控制中存在的技术问题开展研究[41]。由于缆绳的存在,地面基站至少要有一个可实时控制的绞盘,用来根据天气情况和飞行情况自动收放缆绳,并参与对飞行器的控制。在飞行器飞行过程中,地面基站需要自动跟随飞行器的位置旋转,以保证缆绳在高频收放时能够较好地贴合绞盘,不会缠绕到绞盘之外。对于陆基AWES系统,绞盘要连接发电机,并且要具备主动收放缆绳和被动发电两种状态间的自动切换能力,由于功率输出不连续,还需要在地面站中配备整流设备。对于空基AWES系统,需要用高压电将飞行器上产生的电能传输到地面以减少损失,因此需要在基站内集成变压器及能量储存装置。对于采用圆周轨迹进行飞行的系统,还需要采用特殊的设计来抵消飞行器沿同一方向持续飞行在缆绳上所造成的扭力。为了避免飞行器起降阶段或在基站停放时与基站发生碰撞,不仅面要提升飞行器的控制精度,还要在基站上设计特殊的对接装置和固定装置。要保证集成上述诸多功能的地面基站的可靠性,对于研究人员是一个不小的挑战。
3.4 切风飞行综合优化技术
当前关于AWES的研究主要围绕整个系统的运行方式开展,多数研究单位使用了成熟的飞行器构型,而忽视了飞行器设计本身能够给系统带来的发电功率的提升。若从飞行器设计的角度出发,进一步细化分析飞行器的设计参数和性能与系统发电功率的关系,以提升系统发电功率为目标,对飞行器进行全新的设计和优化,能够使发电功率进一步提升。
此外,还可以对系统的其他参数进行综合优化。例如,对变化风场中飞行器的飞行高度、航线大小以及飞行轨迹与地面的夹角等参数进行优化,以实现发电功率最高的总体飞行规划。需要注意的是,优化的结果很大程度上取决于初始条件,但初始条件通常有很大一部分基于假设。而对于AWES系统,缆绳阻力的微小变化可能导致优化得到飞行高度相差近千米[42]。因此优化设计通常需要对整个系统的精确分析(例如精确的动力学模型等)来支撑,而这一步目前难度较大,还需要研究人员的进一步努力。
4 结束语
通过对切风飞行原理的简要分析及国际上典型切风模式AWES的发展概述,可以看出目前切风模式AWES发展尚不成熟,大部分项目尚处于实验验证阶段,还有诸多问题亟待解决。
对系留缆绳进行进一步减阻和减重,可以减少全系统气动阻力,提升飞行高度,一方面降低系统运行的能量损耗,另一方面可以触及高空密度更大的风能。切风飞行器及缆绳等运动部件的受力情况较为复杂,受风力影响大,相互之间还存在制约,若能更加精准地对其进行建模与控制,则有助于提升全系统的仿真与分析能力。地面基站集成了输电、控制、随动等复杂功能,其设计水平直接影响到整个系统的性能,目前还存在较大的优化设计空间。对包括切风飞行器优化设计、考虑环境参数变化的飞行策略优化设计等在内的全系统优化设计,可进一步实现发电功率的提升。
相信通过研究人员不懈努力,当下切风飞行器所面临的问题必能够得到解决,届时高空风力发电系统的发展水平将迈上一个新的台阶。
[1] Archer C L, Caldeira K. Global assessment of high-altitude wind power[J]. Energies, 2009: 2(2): 307-319.
[2] Marvel K, Kravitz B, Caldeira K. Geophysical limits to global wind power[J]. Nature Climate Change, 2013, 3(2): 118-121.
[3] Miles L Loyd. Crosswind kite power(for large-scale wind power production)[J]. Journal of Energy, 1980, 4(3): 106-111.
[4] Diehl M. Airborne wind energy: basic concepts and physical foundations[C]∥U.Ahrens, M.Diehl, R.Schmehl. Airborne wind energy. Berlin: Springer, 2013: 3-22.
[5] Makani Power website.[EB/OL].[2017-10-19]. https:∥www.google.com/makani.
[6] Antonello Cherubini. Airborne wind energy systems: A review of the technologies[J]. Renewable and Sustainable Energy Reviews, 2015, 51: 1461-1476.
[7] Roland Schmehl. Airborne Wind Energy Conference 2015[C]. The Netherlands: TU Delft, 2015.
[8] Williams P, Lansdorp B, Ockels W J. Optimal crosswind to wing and power generation with tethered kites[J]. Journal of Guidance, Control and Dynamics, 2008, 31(1): 81-93.
[9] Canale M, Fagiano L, Milanese M. KiteGen: a revolution in wind energy generation[J]. Energy, 2009, 34(3): 355-361.
[10] Ippolito M. System and process for automatically controlling the flight of power wing airfoils: US, 8152106B2[P]. 2012-04-10.
[11] Ippolito M. Tether for tropospheric aeolian generator: US, 8539746B2[P]. 2013-09-24.
[12] Canale M, Fagiano L, Ippolito M, et al. Control of tethered airfoils for a new class of wind energy generator[C]. USA: IEEE, 2006: 4020-4026.
[13] KiteGen Website.[EB/OL].[2017-10-19]. www.kitegen.com.
[14] Dunker S. Ram-air wing design considerations for airborne wind energy[C]∥Ahrens U, Diehl M, Schmehl R. Airborne wind energy. Berlin: Springer, 2013: 517-546.
[15] Ampyx Power website.[EB/OL].[2017-10-19]. http:∥www.ampyxpower.com.
[16] Sieberling S, Ruiterkamp R. The power plane an airborne wind energy system conceptual operations[C]∥11th AIAA ATIO conference, Virginia Beach: AIAA, 2011.
[17] Licitra G, Koenemann J, Horn G, et al. Viability assessment of a rigid wing airborne wind energy pumping system[C]. Strbske Pleso, Slovakia: IEEE, 2017: 452-458.
[18] Licitra G, Sieberling S, Engelen S, et al. Optimal control for minimizing power consumption during holding patterns for airborne wind energy pumping system[C]. Aalborg, Denmark: IEEE, 2016: 1574-1579.
[19] Erhard M, Strauch H. Control of towing kites for seagoing vessels[J]. IEEE Transaction on Control Systems Technology, 2013, 21(5): 1629-1640.
[20] Maass J, Erhard M. Software system architecture for control of tethered kites[C]∥Ahrens U, Diehl M, Schmehl R. Airborne wind energy, Berlin: Springer, 2013: 599-611.
[21] Wrage S, Brabeck S. Starting and recovering device for an aerodynamic profiled element, and aerodynamic profiled element. PCT Patent, WO2008019700[P]. 2008-02-21.
[22] Erhard M, Strauch H. Flight control of tethered kites in autonomous pumping cycles for airborne wind energy[J]. Control Engineering Practice, 2015, 40: 13-26.
[23] Ockels W J. Laddermill, a novel concept to exploit the energy in the airspace[J]. Aircraft Design, 2001, 4(2): 81-97.
[24] Kitepower website.[EB/OL].[2017-10-19]. https:∥kitepower.nl.
[25] Fechner U. A methodology for the design of kite-power control systems[D]. Delft: TU Delft, 2016.
[26] Fechner U, Schmehl R. Downscaling of airborne wind energy systems[J]. Journal of Physics: Conference Series, 2016, 753(10): 102002.
[27] Loyd M L. Wind driven apparatus for power generation: US, 4251040A[P]. 1981-02-17.
[28] Lind D V, Niekerk B V, Hardam C. Tethered system for power generation: US, 2010295303A1[P]. 2010-11-25.
[29] Griffith S, Lynn P, Montague D, et al. Faired tether for wind power generation systems: US, 20090289148A1[P]. 2009-11-26.
[30] Bevirt J. Tethered airborne power generation system with vertical take-off and landing capability: US, 2010283253A1[P]. 2010-11-11.
[31] Bevirt J, Peddie M. System and method for controlling a tethered flying craft using tether attachment point manipulation: US, 2011121570A1[P]. 2011-05-26.
[32] Bevirt J. Tethered sheaths and aerodynamic tether assemblies: US, 20110266395A1[P]. 2011-11-03.
[33] 郭井宽. 中国高空风力发电专利分布研究[J]. 经济管理者, 2016, (19): 7-8.
Guo Jingkuan. Research on distribution of airborne-wind-energy patents in China[J]. Manager Journal, 2016, (19): 7-8.(in Chinese)
[34] Cherubini A. Kite dynamics and wind energy harvesting[D]. Milan, Italy: Politecnico di Milano, 2012.
[35] Payne P R. Self-erecting windmill: US, 3987987A[P]. 1976-10-26.
[36] Zanon M, Gros S, Andersson J, et al. Airborne wind energy based on dual airfoils[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1215-1222.
[37] Tigner B. Multi-tether cross-wind kite power: US, 80662 25B1[P]. 2011-11-29.
[38] Ji Y, He J. Analysis on lightning triggering possibility along transmission tethers of high altitude wind energy exploitation system[J]. Electric Power Systems Research, 2013, 94: 16-23.
[39] Lind D V. Analysis and flight test validation of high performance airborne wind turbines[C]∥Ahrens U, Diehl M, Schmehl R. Airborne wind energy. Berlin: Springer, 2013: 473-490.
[40] Argatov I, Rautakorpi P, Silvennoinen R. Apparent wind load effects on the tether of a kite power generator[J]. Journal of Wind Engineering and Industrial Aerodynamics, 2011, 99(10): 1079-89.
[41] Prieto I G, Duran M J, Che H S, et al. Fault-tolerant operation of six-phase energy conversion systems with parallel machine-side converters[J]. IEEE Transaction on Power Electronics, 2016, 31(4): 3068-3079.
[42] Cherubini A. Kite dynamics and wind energy harvesting[D]. Milan: Politecnico di Milano, 2012.
猜你喜欢
防爆电机(2022年1期)2022-02-16
故事作文·高年级(2021年12期)2021-12-21
航空学报(2021年9期)2021-10-20
船舶(2020年6期)2021-01-21
船舶标准化工程师(2020年5期)2020-10-17
科学大众·小诺贝尔(2020年5期)2020-07-23
红领巾·探索(2020年2期)2020-05-19
上海海事大学学报(2019年4期)2019-12-30
电子制作(2019年7期)2019-04-25
意林·少年版(2018年9期)2018-05-30