
数字视频降噪算法的研究与硬件实现
2018-05-30 01:48福州瑞芯微电子股份有限公司郑天翼
电子世界 2018年9期
福州瑞芯微电子股份有限公司 郑天翼
数字视频图像处理系统中,数字视频采集、传输、解码等过程,发生不同噪声的可能性较大。而出现噪声会对视频质量、数字视频处理,构成直接的影响。针对于此,应合理的运用数字视频降噪技术,将视频造成消除,从而对视频进行压缩、识别处理,进而切实提高视频的质量。
一、数字视频降噪算法的主要原理
噪声方差估计,即为通过噪声方差对模块估计的方法,主要通过求块方差加权平均方法处理。由于噪声估计方法,需遵循一定的规则,所以应尽可能防止噪声方差在估计期间,被视频图像信息所影响,明确视频图像空白块。所选择的宏块大小为8×8,实行方差计算时应选择最小数值,这时就会对图像信息构成不良影响,无法达到估算的最佳效果[1]。为此,这时应在原有算法之上进行改善,对不同的块实行方差计算,将有利的图像信息予以滤除处理。再应将8×8大小的宏块,平均分成4个子块,对子块方差进行计算,以此获得加权平均数值。最后,将宏块的方差数值,作为估算图像方差的数值。
当前,我国和国外一些国家对视频降噪技术进行了深入研究,时域滤波可构成相对完善的理论机制。时域滤波,可很好的结合运动估计模块、运动强度,明确现阶段块、匹配块的时域滤波强度,与加权平均滤波相互适应[2]。所使用的滤波器、时域加权平均系数,均为提前设定好且不能更改。这时,为实现时域滤波的效果,应合理的调整算法,将时域加权滤波系数控制正常的范围中。在视频图像滤波期间,参照运动强度、噪声方差情况,合理选择滤波的系数,以此合理调节滤波系数阈值,获得最理想的降噪效果。
(一)运动估计原理
块匹配运动估计,通过M×N大小宏块作为单位,选择块的大小。因为块过小,易于发生电路运算量增加情况,使得实际运行的时间延长,无法充分发挥资源的最大作用。反之,容易产生匹配块搜索问题,并且无法保证运动估算结果的可信度[3]。针对于此,需结合电路具体需求选择块的大小。算法的主要原理,将帧图像划分成定量、不重叠的宏块,以各个子块作为运动的质点,以便为参考帧、匹配、搜索等提供有利的参照。最后,需做好最适宜的匹配块,以及匹配块位移记录方面的工作,明确块及匹配块相对运动位移情况、块运动矢量。块匹配的标准:视频图像运动估计的期间,会对匹配块选取情况构成直接影响,如:匹配、搜索、块大小、视频图像携带噪声等。所以,需考虑到电路设计的特点,在运动估计时,保证硬件的实时性,旨在实现节约FPGA硬件资源的效果。
(二)运动估计搜索方法
结合参考帧匹配块算法准则,使用全搜索算法处理,全搜索算法具有计算简便、搜索效率高的特点,然而计算量较大。如果选择8×8大小的搜索窗口,就需对64个像素点实行SAD计算。这时应完善SAD值比较工作,选择出最匹配的块。相关研究人员表示,搜索算法主要经三步搜索、四步搜索、菱形搜索、二维对数搜索等方法构成。为充分发挥硬件资源的作用,可经三步搜索法处理,这一方法存在简单、高效搜索的优势。初始像素以0开始,选取4作为搜索步长,对四周点SAD值实行块匹配计算,比较各点SAD值的差异性,将最小SAD值作为匹配点[4]。若上一步明确了最小SAD值,处于0的位置,可完成搜索。第二步最小SAD值,处于1的位置,即可结束搜索的任务。
(三)运动强度检测方法
按照以上匹配准则、搜索方法可明确块,但是时间轴会出现一定的移动变化,和静止图像比较,需实行时域滤波。因为受到运动估计、搜索算法的影响,使得部分块在参考帧中,可获得匹配块。若前一帧、后一帧,均没有找到帧匹配块,应继续实行时域平均滤波,防止持续视频图像质量下降情况。
(四)噪声方差估计单元算法
造成强度估计,会对视频影像处理情况,构成直接的影响。通过对噪声方差估计电路进行设计,做好视频图像噪声强度检测工作。运动强度检测模块,需参照噪声方差估计单元,对噪声方差估计值实行计算,合理调整运动强度检测阈值,明确块的实际运动强度。视频噪声估计方法,主要包括:基于平滑法、基于小波变换法、基于块法。
(五)时域滤波算法
数字视频处理,能保留视频图像文理,将图像中的噪声消除。时域滤波,可建立在多幅视频图像加权平均基础之上,对视频图像静止位置通过连续图像信号的作用,促使时域信息噪声保持独立状态。然后,通过视频图像加权平均技术,保证视频图像的信噪比、图像质量。
(六)空域滤波算法
如果经运动估计获得当前块、匹配块运动强度估计值>估计阈值,此时应调整为空域滤波方式处理。视频图像空域滤波,即为对单幅图像信息处理的算法,借助视频图像明确空间区域的额相关性[5]。当前,空域滤波算法比较多元化,快速中值滤波,属于新型非线性去噪的方法,可保证图像的清晰度。这一滤波工作的原理:将图像中的所有像素点,通过一个滤波创口像素点取代,进而达到降噪的效果。传统的空域降噪有中值滤波,高斯滤波,双边滤波,复杂点的有小波域与DCT域滤波,其核心思想是变换到其它域分多频段来进行精细的滤波,在不同ISO下配合噪声估计曲线进行阈值控制,会得到较好的滤波效果。
二、数字视频降噪算法硬件实现研究
(一)Verilog HDL的基本概述
Verilog HDL,属于比较复杂的数字电路设计、仿真开发硬件描述语言。在数字电路系统中,应用分层时序建模期间,可达到较好的应用效果。合理运用Verilog HDL描述语言,结合电路功能具体要求、需求,获得数字逻辑电路设计。为此,应对电路提出具体设计要求,使其能分成小模块,做好配置工程师的工作。然后,细分模块,直至模块大小完成周期设计工作,有效减少开发的时间。
(二)硬件结构设计要点
数字视频降噪电路硬件实现组织结构,主要由AXI总线、帧数据缓存、噪声方差估计、运动估计等模块构成。
1、AXI总线模块设计要点
AXI,属于高级扩展的接口,有五个独立通道(读命令,读数据,读响应,写命令,写数据),可实现高效数据传输。实行AXI架构,应基于burst传输,对读地址通道、读数据通道,以及写地址通道、写数据通道、相应通道等,提出明确的要求。其中,地址通道锁携带控制信息,多在描述中被传输数据属性,数据传输使用的写通道,可达到主——从传输的效果,进而一次性完成传输工作。
2、帧数据缓存模块降噪要点
通过数字视频降噪算法,对帧图像实行有效处理,并做好数据的处理工作。如此一来,大容量存储结构能通过色彩空间转换模块,获得亮度信号方面的数据。针对大容量存储结构来讲,可通过ARAM作为存储器,读写控制比较简单,且可保证数据传输的连续性、数据效果清晰。
3、噪声方差估计模块降噪要点
运动估计,对于图像噪声比较敏感,若噪声较大,在实行运动检测的过程中,相对运动较小块,会受到噪声影响容易被误认为空域滤波。此时会对降噪效果构成不良影响,并且增加运动估计的差错率。为此,可使用基于块方差加权平均方法,对数据大小如4×4的块进行处理,合理计算控制单元数据时序,可通过经插入寄存器方法,控制时延,对各个像素数据达到输入口噪声方差加以有效计算。
4、运动估计模块降噪要点
运动估计,即为电路模块需实现的功能,对视频图像运动情况进行评判。视频图像运动检测方法较多,为满足功能设计的要求、需求,应基于匹配运动进行估计。基于块匹配运动估计算法,则需合理运用邻近的参考帧,因为这硬件的资源较大、操作简单。因此,能够保证运动检测的效果,按照既定的目标进行计算。
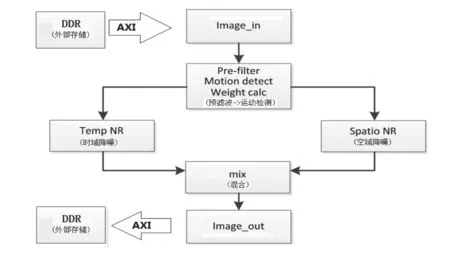
图1 硬件框图
5、运动强度检测、时域滤波、空域滤波降噪要点
运动强度检测模块,主要对搜索获得的匹配块、当前块相对运动状况进行评判。空域滤波降噪,可在较短的时间获得中值滤波,明确FPGA硬件资源、开发成本的因素。这一模块在硬件实现过程,应选择大尺寸的滤波窗口实行空域滤波降噪。 时域滤波降噪,主要应用于运动强度较小/相对静止的视频图像中,降噪效果会受到时域滤波模块所影响。
三、结语
数字视频图像降噪问题,为当前首要解决的问题。当前,我国科学技术的良好发展,使得越来越多数字视频降噪算法出现。为充分利用数字视频降噪算法,与硬件实现,应考虑到视频图像边缘信息,在满足硬件条件基础上,有效运用不同的模块实行计算,保证视频图像的清晰性。
[1]孙俊灵,孙光民,马鹏阁等.基于对称小波降噪及非对称高斯拟合的激光目标定位[J].中国激光,2017(6):172-179.
[2]谢偎凡,朱宗玖.基于仿生原理的数字图像降噪方法[J].科学技术创新,2017(3):179-180.
[3]张士磊,吕鲲.MEMS陀螺仪中一种新的小波变换降噪算法[J].湘潭大学自然科学学报,2017(4):123-126.
[4]汪冬冬,李岳楠.基于时空深度神经网络的视频指纹算法[J].激光与光电子学进展,2018(1):230-236.
[5]马晓婷,尚宇.ECG去噪算法的设计与实现[J].国外电子测量技术,2017,36(7):18-22.
猜你喜欢
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
测控技术(2018年11期)2018-12-07
电子测试(2018年9期)2018-06-26
初中生世界·九年级(2017年10期)2017-11-08
系统工程与电子技术(2016年7期)2016-08-21
西北工业大学学报(2015年4期)2016-01-19
计算机工程(2015年4期)2015-07-05
中国交通信息化(2015年8期)2015-06-06
