
基于单片机的智能盲人避障靴子
2018-05-30 01:48:01大连海事大学信息科学技术学院刘天金
电子世界 2018年9期
大连海事大学信息科学技术学院 刘天金 杨 雪
0 引言
随着科学技术的飞速发展,电子产品越来越普遍,一些智能盲人出行辅助设备的出现大大改变了盲人对传统的盲杖的依赖,但是有些智能电子设备价格昂贵,且类似于智能盲杖之类的设备带来了一定的劳动强度,给盲人的出行带来了不便。
目前,单片机的控制技术已经非常成熟。将单片机与其他诸如超声波测距、液晶显示器、人体感应器、GPS模块等结合起来实现智能盲人避障鞋子的设计,具有深刻的现实意义和研究意义。本文主要围绕智能盲人避障靴子主要功能的设计与实现展开研究,以设计一种价格低廉、适用范围广、操作方便、并能实现简单人机交互的智能盲人避障靴子。
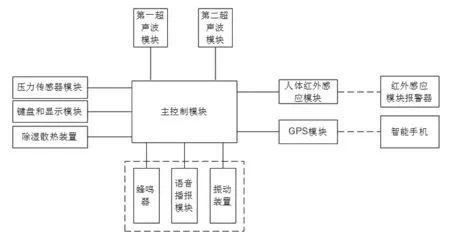
图1 系统功能框图
1 系统概述
该智能盲人避障靴子总体由7个模块构成,功能框图如图1所示。其中,主控制模块以单片机为核心构成,对系统进行整体控制;超声波模块进行障碍物距离探测,由固定高度不同的两个超声波模块结合可以实现对障碍物高度的预估;人体红外感应模块可以对行人进行探测,红外感应报警器与之无线连接实现报警提示;报警提示模块由蜂鸣器、语音播报和振动装置三个部分构成;按键与液晶显示可以实现报警距离的设置和语音录入操作;压力传感器模块控制超声波电路的通断进行防误判处理;GPS模块对盲人进行定位,并通过GSM模块与智能手机通信;除湿散热装置对主控制模块进行必要时的除湿散热。
2 硬件设计

图2 实物结构简图
该智能盲人避障靴子的实物结构简图如图2所示,其中各模块的名称为:1.鞋体;2.第一超声波模块;3.第二超声波模块;4.压力传感器;5.蜂鸣器模块;6.语音播报模块;7.主控制模块;8.振动装置;9.人体红外感应模块。
下面结合系统具体功能介绍该项目的硬件设计。
2.1 超声波避障
此功能由HC-SR04超声波测距模块来实现,此模块安置于靴体前端并按照高度不同分为第一超声波模块与第二超声波模块。模块实物图如图3所示。VCC供5V电源,TRIG为触发控制信号输入引脚,ECHO为回响信号输出引脚,GND为地线。用单片机连续向TRIG引脚输出10μs以上的脉冲触发信号,该模块内部将循环发出8个40KHz脉冲并由接收管检测回波,一旦检测到有回波信号则ECHO引脚向单片机输出高电平回响信号,回响信号的持续时间即超声波从发出到碰到障碍物后的返回时间,工作时序图如图4所示,由公式1计算出障碍物的距离,通过测试,此模块的测距精度可达3mm。
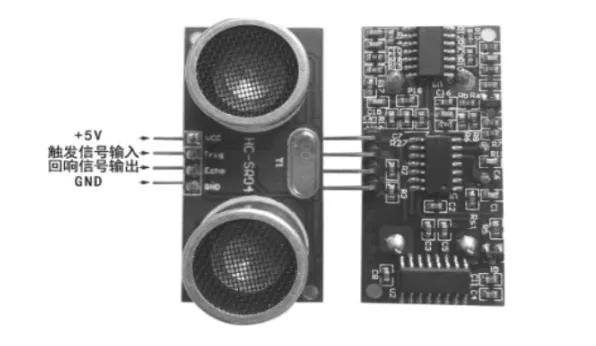
图3 超声波模块实物图

图4 超声波模块工作时序图

2.2 防误判设计
由于盲人在行走抬脚时脚尖会下倾,此时超声波模块也会下倾朝向地面,会引起的超声波模块的误检测。为此,项目组在靴子脚后跟处安置压力传感器,位置如图二中4所示,这样只有在脚放平(即脚完全落地)时,压力传感器才会感受到足够的压力,电阻值减小,此时单片机驱动超声波电路工作;而当脚抬起时,由于压力传感器几乎感觉不到压力,电阻增大,使超声波电路断开,超声波模块不工作,因而也就不会引起误判现象。在防误判功能的实现中,该压力传感器选择薄片式的FSR402,实物如图5所示,其具有纤薄、轻柔、小巧等特点,适合足底压力的检测,其阻值随压力变化关系如图6所示。

图5 FSR402实物图
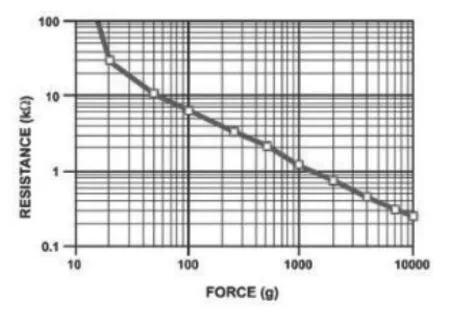
图6 FSR402阻值随压力变化曲线
2.3 障碍物高度预估与距离提醒
该项目在障碍物高度预估功能的实现中,是通过两个超声波模块相配合并辅助以不同的报警提示来完成的。如图2所示,第一超声波模块距离靴底的高度约为50mm,第二超声波模块距离靴底的高度约为200mm。具体实现为:当障碍物高度在50~200mm范围内时,由第一超声波模块进行探测并报警,若障碍物距离在1m~3m范围内,这段距离对盲人安全影响较小,由语音播报提供具体距离信息,若障碍物距离小于1m,这段距离对盲人安全影响较大,由蜂鸣器提供报警提示,且距离越近报警频率越高;当障碍物高度超过200mm时,第二超声波模块也参与测距,并由脚心处的振动装置发出振动。
语音播报距离精确,但不能做到实时播报;而蜂鸣器只能定性提供距离信息,但是距离一旦改变,其音调就会立即发生变化,因此可以做到实时报警,能够及时准确的向盲人提供相关报警信息,保障了盲人的安全。通过不同的报警提示来预估障碍物的高度,可以使盲人通过不同的方式做出相应的处理,比如,如果障碍物高度为50mm~200mm,那么盲人可以稍微迈高即可越过障碍物;如果障碍物高度大于200mm,那么盲人可能要迈更高的步子,或者用手来试探前方是否是墙面或者栅栏一类的较高障碍物,通过这样的方式,来使得盲人的出行更加方便和安全。
2.4 人体红外感应
由于超声波模块只适用于探测静止物体,而对于行人无法进行实时快速的探测,因此我们利用人体红外感应模块来辅助超声波模块进行探测。该人体红外感应模块采用HC-SR501人体红外感应器,实物如图7所示。当该模块探测到前方有行人时,通过蓝牙发出信号;红外感应模块报警器通过蓝牙接收到该信号,使报警器发出警报。电路图如图8所示。
经过测试,该红外感应模块可以检测盲人前方7m以内、120°的锥体范围内的行人,当在该范围内有行人时,报警器即可产生报警。相比于超声波模块,人体红外感应模块探测范围大,效率高,二者相互弥补,使探测系统更加完善。
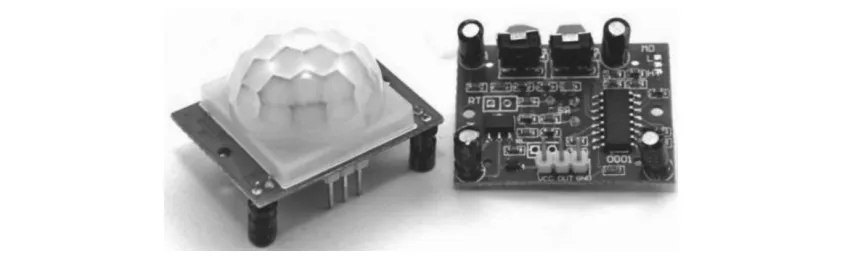
图7 人体红外感应模块实物正面与背面
2.5 GPS定位
该智能盲人避障靴子采用体积小、功耗低的GY-NEO-6M GPS模块实现定位,其与主控制模块安置在一起。单片机通过串行接口控制GPS模块对盲人进行实时定位,并读取定位信息,再把位置信息传递给GSM模块,GSM模块利用GSM网络将接收的定位数据传递到盲人家人的手机上,从而实现对盲人的定位。GPS模块工作示意图如8所示。GPS模块通过GSM模块与手机通信,方便盲人的家属实时的了解和监视盲人的位置,保证了盲人的安全,防止其走失。

图8 GPS模块工作示意图
2.6 报警提示模块
报警提示模块由蜂鸣器、语音播报和振动装置三个部分构成。蜂鸣器采用TMB12A05有源电磁式蜂鸣器,其具有功耗低、易于实现的特点;语音播报模块采用ISD4004语音芯片,该芯片具有可重复擦写的功能,即使用者可以自己录入语音提示声音;振动装置用偏心电动机来实现,其与手机振动器原理相同。这些提示模块分别在上文所述超声波模块、人体红外感应模块的条件下起作用。
2.7 除湿散热装置
在除湿散热装置中,包括温度探测装置、湿度探测装置、加热模块以及风扇模块。用于实时监测主控制模块所处的工作环境,并将测得的信息发送给主控制模块,当主控制模块处于的环境不适合其工作时,主控制模块控制除湿散热装置的加热或风扇模块进行工作,以提供主控制模块合适的工作环境,防止硬件老化,延长其使用寿命。
3 软件设计
该系统主程序工作流程图如图9所示。

图9 主程序工作流程图
4 结束语
在电子技术产品高速发展的形势下,单片机的应用越来越普遍,利用单片机开发出来的产品已普遍应用于生活中。本文设计的智能盲人避障靴子也是基于单片机的开发而进行的,对功能进行了详细的阐述。从盲人的角度出发,为盲人的出行提供了便利的同时,GPS功能的设计使得盲人的家人可以随时随地查看盲人的位置,进一步保障了盲人的安全。
[1]王冠生,郑江华,瓦哈甫·哈力克,刘敬强,李荣立.基于Haptic技术的盲人辅助路径诱导服务研制[J].电子技术应用,2012(5):145-148.
[2]于姣.基于单片机带温度补偿的超声波测距仪设计[J].电子科技,2015(8):56-58
[3]倪洋勋.浅谈单片机在电子技术中的应用[J].计算机教学,2017(24):64-65.
[4]鲍捷,陈洪斌,欧人侠.基于单片机的新型导盲器的设计与应用研究[J].电子科技,2017(18):5-6.
[5]绳玉玲.浅谈超声波测距[J].电子测量,2017(7):46.
[6]陈林,陈金松,沈俊艺,陈亨利,汤姝茜.GPS定位智能导盲系统[J].数字技术与应用,2017(3):192-193.
[7]杨静,王收军.基于STC单片机GSM、GPS车载定位报警系统的设计[J].天津理工大学学报,2016(1):18-19.
[8]马宏平,蒋励,宋竹青,马彦鹏,王风丽.多方向红外测距新型智能导盲杖[J].光学仪器,2012(5):84-88.
[9]姚聚慧,郑江华,王冠生,邵紫阳.盲人路径诱导服务中的震动技术应用与研究[J].计算机应用与软件,2012(11):20-23.
[10]张应和.基于Wi-Fi智能车远程测距装置结构设计与研究[J].机电一体化,2013(2):33-35.
[11]郭天祥.新概念51单片机C语言教程[M].电子工业出版社,2009.
[12]向长秋,胡湘娟,阳泳.基于AT89C51单片机的盲人避障装置的设计[J].科技展望,2015(30):130.
猜你喜欢
小猕猴智力画刊(2023年11期)2023-11-30 03:21:16
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:36
电子测试(2021年9期)2021-06-17 10:59:46
电子制作(2021年9期)2021-06-17 03:59:54
电脑报(2020年12期)2020-06-30 19:56:42
小天使·一年级语数英综合(2019年8期)2019-08-27 02:23:00
时代农机(2019年2期)2019-04-24 01:20:14
小学科学(学生版)(2018年11期)2018-11-22 07:12:26
小天使·一年级语数英综合(2017年10期)2017-10-31 07:21:28
山东工业技术(2017年18期)2017-09-12 15:33:07
