
基于多核框架的无人机控制系统
2021-06-17 10:59吕丁豪潘仁斌陈正杰丁盛梁吴卓影谭伟文张庆芳
电子测试 2021年9期
吕丁豪,潘仁斌,陈正杰,丁盛梁,吴卓影,谭伟文,张庆芳
(苏州经贸职业技术学院,江苏苏州,215009)
0 引言
无人驾驶飞机简称“无人机”,在航拍、植保、测绘等领域都有应用。无人机控制系统是无人机的核心部分,是当前的研究和学习的热点。目前常见的无人机控制系统多采用单核控制系统,因为需要对多个传感数据进行采集和分析处理,同时实时性要求较高,一般采用的控制芯片价格较贵,芯片相应的程序结构也相对复杂,不易于二次开发。本文对现有无人机控制系统的功能分析,把功能分为基于传感器的数据采集部分、数据分析处理和电机控制部分、飞行数据存储和显示三部分,分别采用三个芯片进行处理,不仅很好将程序进行模块化,有效的降低对芯片性能的要求。
1 硬件电路设计
系统的硬件原理框图如图1所示。该系统以主控制单元、数据采集单元、数据记录和显示单元为核心,由传感器模块、电机驱动模块、接收机、人机交互模块等构成。
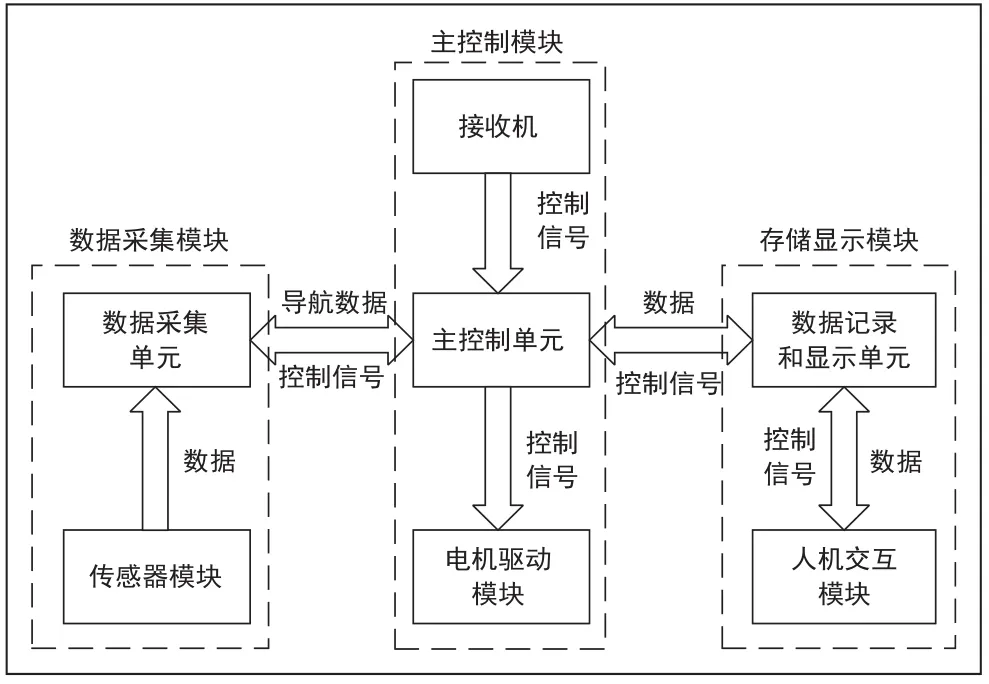
图1 系统结构框图
■1.1 主控制模块
主控制模块由主控制单元、电机驱动模块、接收机模块组成,如图2所示,主控制单元采用STM32F411CEU6芯片,它是意法半导体F4系列的MCU,拥有较高的主频和丰富的外设资源。电机驱动模块采用大力四合一电调,该电调每路支持40A的电流输出。接收机模块采用与MC6C遥控器相配套的MC7RB接收机。

图2 主控制单元电路
■1.2 数据采集模块
数据采集模块由数据采集单元、传感器模块组成,如图3所示,数据采集单元采用STM32F301K8U6芯片,它是意法半导体F3系列的一款MCU,拥有高速的IIC通信外设,并比F1系列多了一个硬件浮点运算单元。本系统采用的传感器芯片是MPU9250和FBM320,其中MPU9250集成了陀螺仪、加速度计和磁罗盘等传感器,FBM320是气压计传感器。

图3 数据采集单元电路
■1.3 存储显示模块
存储显示模块由数据记录和显示单元、人机交互模块组成,如图4所示,数据记录和显示单元采用STM32 F103CBU6芯片,它是意法半导体F1系列的一款MCU,其价格便宜,市场占有率高,其性能足够满足人机交互性能要求。
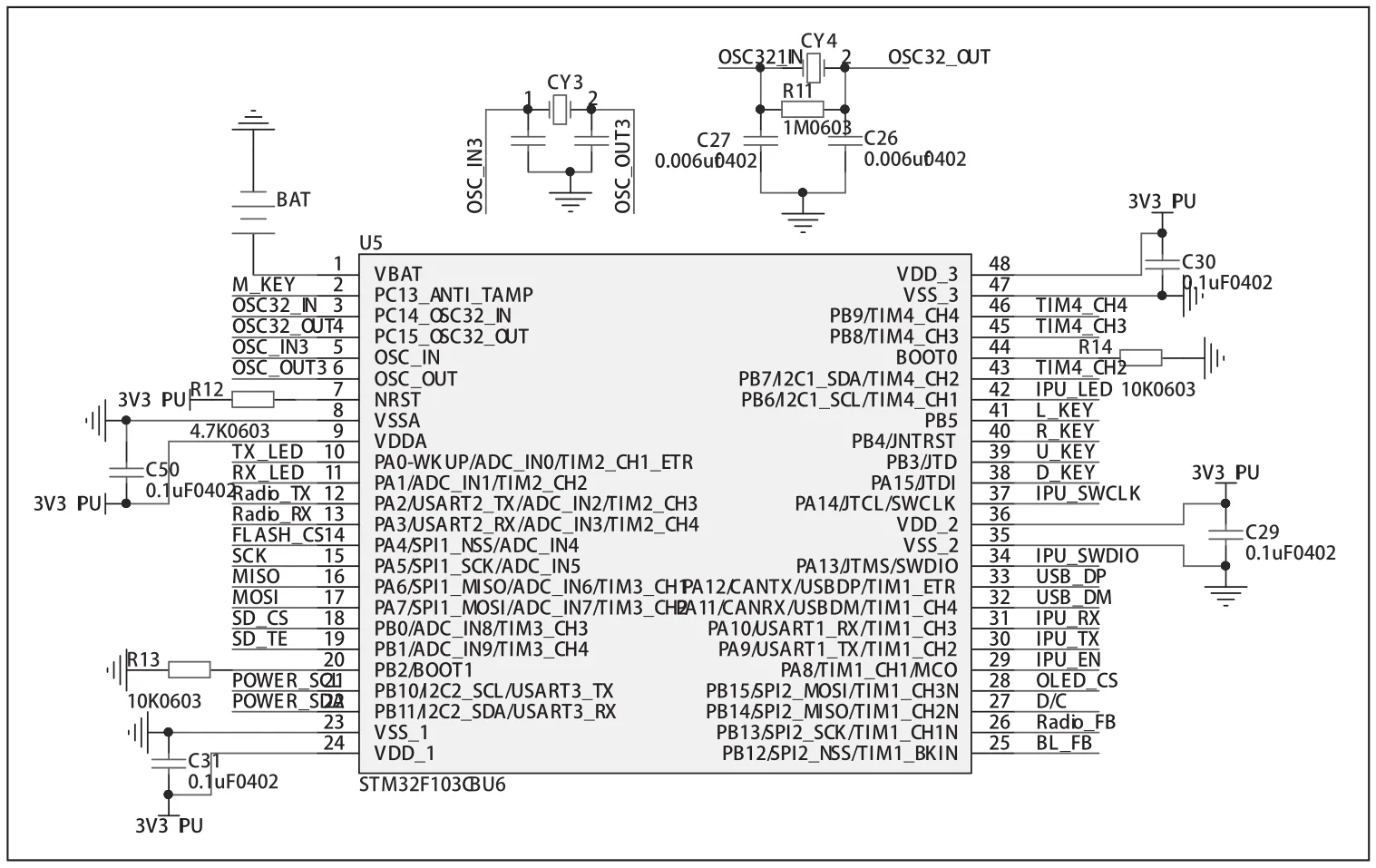
图4 数据记录和显示单元电路
2 软件部分设计
系统程序软件由主控制模块程序、数据采集模块程序和存储显示模块程序组成。
■2.1 主控制模块程序
如图5所示为主控制模块程序的流程图,此模块负责接收决策信号、转发数据和控制电机。系统上电启动后先初始化串口外设,接着接收数据采集模块发送的数据,数据接收成功后,系统对数据进行分析,进行电机控制。

图5 主控制模块程序的流程图
■2.2 数据采集模块
如图6所示为数据采集模块流程图,此模块负责读取传感器的数据并记录传感器的状态。系统上电后执行导航程序,将数据传递给主控制单元。系统启动后需初始化与主控制单元通讯的USART外设、与传感器通讯的IIC外设、传感器。

图6 数据采集模块流程图
■2.3 存储显示模块
如图7所示为存储显示模块流程图,此模块主要负责数据显示和存储,系统对接收的数据进行重组,同时进行按键扫描、屏幕显示和SD卡数据写入。

图7 存储显示模块
3 结语
本文对无人机的控制系统进行改进,用多核控制系统替代单核控制系统,降低了系统对芯片性能的要求,增加了系统的计算能力,有效的提升了系统的实时性,同时,在多核的硬件基础上,对程序结构进行改进,模块化程序,降低了二次开发的难度。
猜你喜欢
电子制作(2021年9期)2021-06-17
智能制造(2020年5期)2020-07-03
山东工业技术(2017年18期)2017-09-12
汽车维护与修理(2017年17期)2017-02-07
河南科技(2016年8期)2016-09-03
河南科技(2016年6期)2016-08-13
浙江共产党员(2014年12期)2014-07-10
电子设计工程(2014年18期)2014-02-27
天津医药(2012年3期)2012-11-28
现代计算机(2009年9期)2009-12-02
