电动汽车开关磁阻电机UKF软传感控制研究
2018-05-26 02:03:37刘芳华缪国斌
机械设计与制造 2018年5期
刘芳华,缪国斌,楼 飞
1 引言
随着我国制造业的不断发展以及国家对环境污染问题的不断重视,汽车市场已经从单一的燃油动力汽车向各种形式的新能源汽车转变。在环境污染严重、能源日益短缺以及气候变化加剧的大环境影响下,电动汽车的出现给整个运输业带来了一股新的气息,它在一定程度上摆脱了对燃料的依附且不产生高噪声。因此,对于车辆续航以及稳定控制的研究就显得尤为重要。
开关磁阻电机(Switched Reluctance Motor,SRM)结构简单、启动电流小、启动转矩大、能在较宽的速度和转矩范围内高效运行且可靠性高,已成为业界最具潜力的电动汽车驱动电机之一。由于开关磁阻电机结构的独特性,SRD依赖于转、定子之间的相对位置信息进行调速。目前业界主要通过光敏、磁敏等位置传感器来检测转子位置,此类方案简单易实现,但需要额外电气连接,对安装精度要求高,受外围信号干扰,且可靠性低。对于摆脱传感器,通过检测相电流来获取转子位置信息的方法,主要有导通相检测法、非导通相检测法、基于智能控制的检测方法和附加元件检测法等。由于数字信号处理等技术的飞速发展,智能控制不断成熟,优势越来越明显[1]。SRM本身具有强耦合、磁饱和、非线性等特性,建立数学模型较难,且车辆运行中存在信号干扰,对电机模型和智能算法的精确性的要求较高。
文献[1-2]分别采用了模糊控制算法估计器和状态观测法对SRM转子位置进行估计,具有一定的实时性和抗干扰能力,但摆脱不了模糊规则调节困难和计算量过大增大误差的弊端。文献[3]通过BP神经网络算法建立起磁链、电流、转子位置间的映射,对SRM转速转矩实现了良好控制。文献[4]以转子位置和电机转速作为状态变量,以电流实测值与估计值的偏差作为滑模面,建立SMO进行有效调速控制。另外,通过扩展卡尔曼滤波算法(EKF)将电机模型进行更新,经离散化、线性化之后,检测电机相电流、相电压实时估算出转子位置和转速也能对电机进行调速控制,但这都避不开线性化误差的影响[5-6]。无迹卡尔曼滤波(UKF)在非线性处理时用UT变换取代了在估计点处的Taylor级数展开和n阶近似,滤波更精准更快速。基于无迹卡尔曼滤波算法设计了一款用于SRM的软传感器调速系统,提升了电机鲁棒性及电动汽车的动力性能。
2 UKF估计器设计
为了便于算法实现,需要对SRM模型进行简化分析,假设忽略极间磁阻边沿效应、忽略铁芯磁滞和涡流损耗、忽略极间互感,假设一个电流脉冲周期内转速恒定,假设控制系统中功率开关器件为理想开关[7]。选择相绕组磁链、角速度ωF、转子位置角θ为状态变量,以相电压为输入,相电流为输出,建立状态方程为:
式中:φ、i、R、U—相磁链矢量、相电流列矢量、相绕阻方阵、相电压列矢量。ω—转速;θ—转子位置角度;D—粘滞系数;J—转动惯量;L-1(θ)—相电感方阵的逆矩阵。
在SRD系统中,相电流与磁链在单个周期内最终都恢复为零,在进行磁链的积分时,假定φ初值为0。由于实际运行中的负载转矩TL会引起速度波动,对精度的影响不容忽视。为了保障系统运行性能,加入了对负载矩阵的估计。
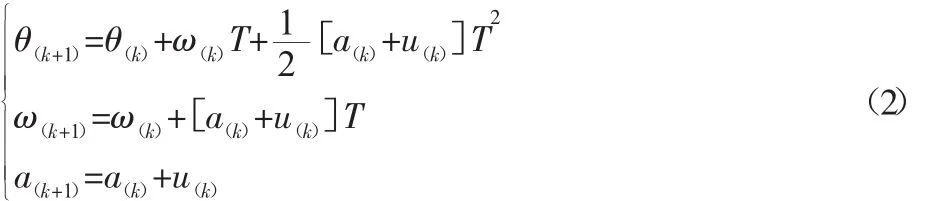
在电机运行过程中,转子转速为ω,目标在k时刻的位置设为 θ(k),经过采样周期 T,目标的位置则为考虑到运行过程中的随机扰动u(k),系统可写为[5]:
系统状态方程可表示为:X(k+1)=φX(k)+ΓU(k)(3)
由于转子的位置信息会直接反应在相电流实时变化上,且在转子切入不同程度的各时刻其对应关系不同,转子从开始切入到转至关断角θoff之间的观测方程可写为:

式中:θon—开通角;θ2—转子刚开始切入定子凸极是的转子位置;V(K)—测量误差,其方差为 R。
获得一组(2n+1)个Sigma点的点集及其对应权值。

计算Sigma点集的一步预测X(i)(k+1/k)=f[k,X(i)(k/k)],i=1,2,…,2n+1。并由Sigma点集的预测值和加权求和计算状态量的一步预测和协方差阵:

根据预测的结果同式(5)再次通过UT变换产生新的Sigma点集 X(i)(k+1/k),带入观测方程,得出预测的观测量,I(i)(k+1/k)。
加权求和求出预测的均值和协方差:

通过Pxkik和Pikik逆矩阵的乘积计算增益矩阵K(k+1)。
状态更新及协方差更新为:

式中:f—非线性状态方程;
n—状态矢量的维数;
Q—随机变量X高斯白噪声W(k)的协方差[8]。
通过上述UKF递推公式,给定电机转子初始位置就可以实时监测位置信息得到转速。由于实际工况要求电机大多位于较高转速状态,在控制系统中采用周期T取0.1ms,确保达到精度要求。
3 控制器设计
根据电动汽车用SRM的工况特殊性及其运行原理,SRD的设计采用电流、转速双闭环结构,即电流内环和转速外环[9-10]。SRD控制框图,如图1所示。本控制器是基于UKF控制策略设计的,通过UKF估计器来监测转子实时位置角并推算出电机转速,取代机械式位置传感器测速。系统包括速度调节器和电流调节器,由电动汽车油门踏板给定转速ωrej和反馈转速ω经速度调节器PI调节后得到给定电流i*,将此给定值再与SRM反馈的实测电流i进行比较,通过电流调节器给出PWM调制信号控制功率电路对开关磁阻电机进行速度调节[15]。

图1 基于UKF无位置传感器的SRD控制框图Fig.1 Position Sensorless Control Diagram of SRD Based on UKF
4 SRD调速仿真验证
针对电动汽车用SRM作出的特殊使用环境,为节省开关器件并减小转矩脉动,增加电机极数,选用三相12/8极开关磁阻电机为样机在Matlab/Simulink中进行仿真分析研究[11],对单个电机进行启动和变速调速,通过阻尼器施加载荷模拟车辆负载来仿真其响应性能和鲁棒性,模型建立,如图2所示。选用3个Random Number模块分别作为过程噪声和观测噪声,3个S函数模块分别用来建立状态方程、参数计算和UKF滤波,再选用两个XY Graph模块显示目标实际状态和UKF估算状态,根据三相12/8极开关磁阻电机的转子极距角θR=45°,步距角αp=15°,给定关键参数 θon=2.5°,θoff=2.5°,θov=4.5°。
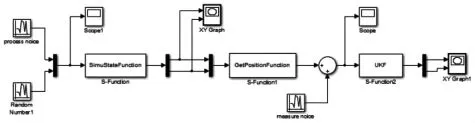
图2 UKF仿真模型Fig.2 Simulation Model Based on UKF
所选电机参数为:额定功率P=30kW,额定转速n=2500r/min,额定电压U=220V,转动惯量J=0.009kg·m2,粘滞系数D=0.05N·m·s。由于燃油车辆在怠速状态发动机转速通常在800r/min左右。因此,给定电动机转速800r/min来模拟电机转速从零开始的车辆启动过程,考虑到实际工况,给定负载10N·m,得到电机转速对比曲线,如图3所示。从曲线可以看出UKF估计器监测的车速与实际车速基本吻合,转速响应敏捷,能够满足车辆正常启动。

图3 转速对比曲线图Fig.3 Contrast Curve of Speed

图4 变速响应曲线图Fig.4 Response Curve of Variable Speed
由于车辆行驶中会因不同路况频繁变向变速,为了验证UKF无位置传感器调速系统的变速响应能力,给定初始转速800r/min后,在t=0.4s时,降速变为700r/min,转速响应曲线,如图4所示。曲线说明了调速系统在变速处理时具有较快的响应速度,系统鲁棒性较强,能够满足电动汽车正常变速行驶,从曲线在降速段有缓慢延迟可以看出本调速系统能够在一定程度上缓解车辆变速过程中的瞬时冲击。

图5 EKF无位置传感器控制速度曲线Fig.5 Speed Curve of Position Sensorless Control Based on EKF

图6 EKF无位置传感器控制变速响应Fig.6 Response Curve of Variable Speed of Position Sensorless Control Based on EKF
基于扩展卡尔曼滤波法设计的SRM调速系统的速度响应曲线图,如图5、图6所示。由图可见,同样给定初始转速800r/min,EKF调速系统需要0.28s达到稳定速度,相对本调速系统滞后0.07s;t=0.4s变速700r/min需要0.1s,相对本调速系统滞后0.02s,对比数据,如表1所示。可看出基于无迹卡尔曼滤波法设计的调速系统响应更加快速,在启动和变速阶段分别领先25%和20%,更能满足电动汽车启动迅速的要求,充分说明UKF相比EKF具有更小的线性化误差。

表1 速度响应时间数据对比Tab.1 Contrast Data of Speed Response
5 结论
基于贝叶斯理论和UT变换的无迹卡尔曼滤波算法在克服算法的线性误差上优势明显,为非线性开关磁阻电机转自位置的估计提供了理论依据,能够更迅捷、更精准的跟踪和估计目标位置。设计了无迹卡尔曼滤波算法估计器来实现开关磁阻电机的软传感调速控制,仿真结果验证了其高效的跟踪表现,具备较高的起动和变速响应,在定速状态下具有良好的速度稳定性,极大的提高了非线性系统的估计效果,满足电动汽车的灵活变速和操稳性需求。
参考文献
[1]Cheok A,Ertugrul N.A model free fuzzy logic based rotor position sensorless switched reluctance motor drives[C].Industry Applications Conference,2010:76-83.
[2]Elmas C H,Zelaya De La Parra.Position sensorless operation of a switched reluctance drive based on observer[C].Fifth European Conference on Power Electronics and Applications,Bright on UK,1993:82-87.
[3]Mese E,Torrey D A.An approach for sensorless position estimation for switched reluctance motors using artificial neural networks[J].IEEE Transactions on Power Electronics,2002,17(1):66-75.
[4]孙园,崔璨,陈天翔.开关磁阻电机SMO无位置传感器系统研究[J].微电机,2014,47(12):36-39.
(Sun Yuan,Cui Can,Chen Tian-xiang.Sensorless control of switched reluctance motor based on SMO[J].Micromotors,2014,47(12):36-39.)
[5]李毓洲,赵克刚.开关磁阻电机扩展卡尔曼滤波无位置传感器控制的研究[J].微电机,2010,43(8):57-60.
(Li Yu-zhou,Zhao Ke-gang.Position sensorless control of the switched reluctancemotorbasedonextendedkalmanfilter[J].Micromotors,2010,43(8):57-60.)
[6]Masi A,Butcher M,Martino M.An application of the extended Kalman filter for a sensorless stepper motor drive working with long cables[J].IEEE Transactions on Industrial Electronics,2012,59(11):4217-4225.
[7]周鹤,周雅夫,周心炜.车用永磁同步电机无位置传感器控制研究[J].机械设计与制造,2013(4):172-175.
(Zhou He,Zhou Ya-fu,Zhou Xin-wei.Sensorless control research for permanent magnet synchronous motor of electric vehicle[J].Machinery Design&Manufacture,2013(4):172-175.)
[8]赵曦晶,刘光斌,汪立新.扩展容积卡尔曼滤波-卡尔曼滤波组合算法[J].红外与激光工程,2014,43(2):647-653.
(Zhao Xi-jing,Liu Guang-bin,Wang Li-xin.Augmented cubature kalman filter/kalmanfilterintegratedalgorithm[J].InfraredandLaserEngineering,2014,43(2):647-653.)
[9]赵影,刘娅如.基于Matlab/Simulin和Ansoft/Rmxprt的开关磁阻电机系统控制仿真研究[J].测控技术,2012,31(2):107-110.
(Zhao Ying,Liu Ya-ru.Study of switched reluctant motor system’s controlling and simulation based on matlab/simulink and ansoft/rmxprt[J].Measurement&Control Technology,2012,31(2):107-110.)
[10]Noma H,Funatsu H,Mimura T.Visual function and serous retinal detachment in patients with branch retinal vein occlusion and macular Edema:A case series[J].BMC Ophthalmology,2011,11(1):163-167.
[11]Myaing A,Dinavahi V.FPGA-based real-time emulation of power electronic systems with detailed representation of device characteristics[J].IEEE Trans on Industrial Electronics,2011,58(1):358-368.
猜你喜欢
防爆电机(2023年6期)2023-11-30 03:05:28
新型工业化(2021年8期)2021-10-23 10:27:10
电子与封装(2021年7期)2021-07-29 10:58:48
防爆电机(2021年4期)2021-07-28 07:42:46
北京航空航天大学学报(2017年9期)2017-12-18 07:12:25
电子设计工程(2017年20期)2017-02-10 03:40:05
电源技术(2016年9期)2016-02-27 09:05:39
电源技术(2015年1期)2015-08-22 11:16:28
电机与控制应用(2015年1期)2015-03-01 03:49:08
电测与仪表(2014年21期)2014-04-04 12:32:08