
基于三维激光扫描仪的地形变化监测
2018-05-26 03:06:36丁孝银肖昭然
中国设备工程 2018年10期
丁孝银,肖昭然
(1.河南工业大学,河南 郑州 450001;2.河南省粮油仓储建筑与安全重点实验室,河南 郑州 450001)
三维激光扫描仪可以快速获取毫米级采样间隔,获得实体表面的三维坐标,并通过“点云”的数据形式,存储在计算机中,可以实现“实景复制”,大大改善了传统以单点监测地形变化的方法,具有速度快、监测精度高的优势。对此方面的研究还有待进一步深入,因此,本文基于工程实例,对基于三维激光扫描仪的地形变化监测做了如下分析。
1 工程概述
某快速通道新建工程K64+214~K78+362段,施工工期为2015年3月到2017年6月,其中北侧边坡在2016年8月完成支护,南侧边坡在2017年4月开始正常,预计在2018年6月完成支护。在进行边坡支护处理过程中,正直雨季大不但增加了支护的难度,而且上部土体发生了多次滑坡现象,对道路施工安全构成了严重威胁。在具体边坡支护中采用三维激光扫描仪对地形变化进行监测,为支护方案的制定提供真实有效的数据依据。
2 三维激光扫描仪组成和系统原理
2.1 三维激光扫描仪组成
整个三维扫描系统由以下几部分共同组成:1台激光测距仪;一组激光反射棱镜;1台水平方位角控制器;1台高度角偏转控制器;1台数据输入输出处理器;1台数码相机。
2.2 三维激光扫描仪监测原理
三维激光扫描仪在地形变化监测中,通过激光测距仪发射出一个激光脉冲信号,通过反射棱镜反射后,进入数据接收器当中,对测量的数据进行综合分析,即可得出地形变化的实际情况,具体如图1所述。
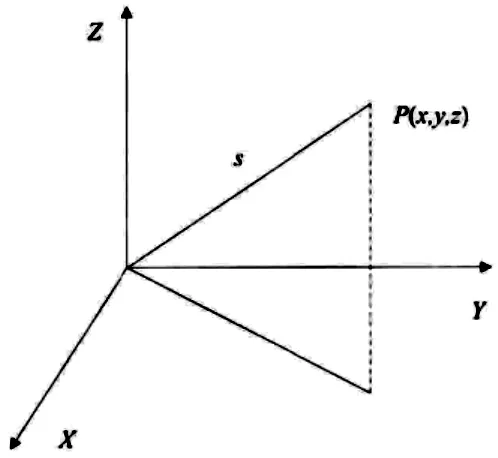
图1 三维激光扫描仪定位原理
为计算P到三维激光扫描仪之间的距离S,通过高度角偏转控制器先测量出射出激光的横向和纵向扫描设观测角度α、β。其中三维扫描仪为自定义坐标,X轴进行横向扫描,Y轴进行纵向扫描,并与X轴相互垂直。然后借助三角函数,就可计算P点的三维坐标标为:

在地形变化监测过程中应用三维激光扫描仪的方法是通过把两期数据构建DEM,再对量取的数据进行全方位的对比,获得二者的差异,在进行对比时,应用到的主要软件是RiSCAN PRO软件,两期数据表面模型之间的距离,通过此种方法就可以得到,二者之间的距离值,就是两期表面之间的差距,就可以的得到地形变化的具体变形量。
3 三维激光扫描仪在地形变化监测中的具体应用
3.1 测量方案的制定
就案例工程而言,采用了三维激光扫描仪来对边坡变形量进行进行全方位扫描,由于北侧边坡支护已经完成,只有南侧边坡在进行施工。沉降位移变形已经趋于稳定,南坡和北坡的距离在60~65m之间,在进行地形变化监测时,为保证监测的准确性,在案例工程的南坡设置监测点,同时在和该点对应的北坡布置3个固定墩台。在进行监测时,把三维激光扫描仪固定的墩台上,监测三次,就可以获得被监测点的三维坐标。
由于边坡在支护过程中,会产生较大的振动,为降低振动对监测的影响,只能在工人休息时进行监测。当三维激光扫描仪监测数据处理完成后,在同样的位置和角度再利用水准仪和全站仪相互结合的监测方式对南坡的待测点进行科学合理的监测。以全站仪和水准仪测量的结果,来确定三维激光扫描仪监测地形变化的具体情况为保证测量的准确性,全站仪和水准仪测量周期要控制在20天左右,然后把三维激光扫描仪监测的数据和全站仪和水准仪测量的数据进行对比,验证结果表明,三维激光扫描仪监测地形变化误差在允许范围内,三维激光扫描仪可以在该工程中得到应用。
3.2 获取后视点定向坐标的方法
在三维激光扫描仪监测地形变化时,为确保每次监测外界数据的一致性,在监测时,靶标要固定在其他两个墩台上,作为参考依据。避免发生因为外界因素的变化,影响地形变化监测的准确性。
3.3 点云数据获取方法
在一次测量中,把三维激光扫描仪先固定墩台上,通过拍照的方法获得靶标的具体位置,对分辨率在30m×1mm以下的区域进行精扫。然后在拍照南侧边坡的具体位置,对分辨率在10m×5mm下的区域进行扫描。就可以获得相应的点云数据,然后再采用全站仪和水准仪来测量南侧边坡三维激光扫描仪位置布设的测点,并对各个数据进行全方位记录,在具体测量时,要每隔半月就测量一次,共测量6~8次,然后取平均值作为地形变化监测的主要数据。
3.4 监测数据的处理和分析
把测量到的点云数据在RiSCAN PRO软件中进行预处理,把噪声点全部去除,就该案例工程而言,由于测量次数比较多,获得的点云数据也比较多,但该工程南坡表明特征大体上基本相同,如果点云数据比较多,则会增加数据处理的难度,但对精度的提升影响不大,所以在RiSCAN PRO软件中要去除掉大约80%的点云数据。
提取南侧边坡测点周围的点云数据,并对三维坐标进行详细记录,在此过程应用到的主要公式是:公式中(x0,y0,z0) 表示上次测量值,(x,y,z)则为RiSCAN PRO软件中的计算值。
准仪测量获取测点的沉降变化数值z,全站仪测量获取测点水平坐标x,y,再利用公式计算坐标点相对于上次测量结果的位移量,得到测点的变化值。结果如表1所示。
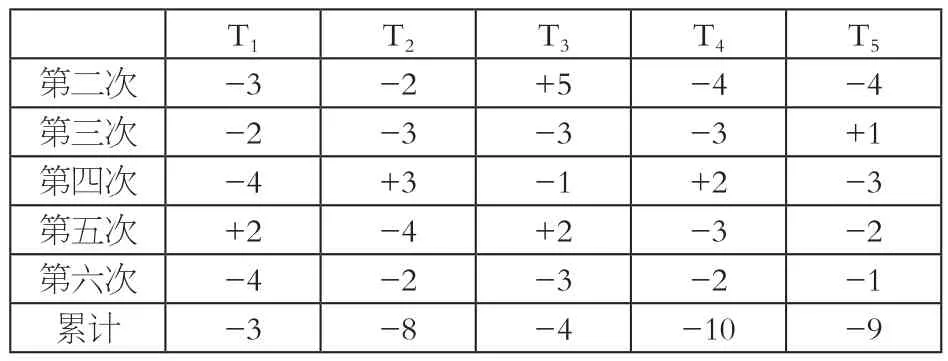
表1 三维激光扫描仪6次测量结果测点周围边坡的平均变化量
从表1中可以看出,该案例工程中三维激光扫描仪每次测量位移变化量在0~4mm,累计变化量在-3~-10mm之间。地表的主要变形为沉降变形,施工过程中,边坡变形比较明显。三维激光扫描仪测量误差在2mm左右,且只有一次的测量误差为4mm,可看做偶然误差。三维激光扫描仪工程测量结果与实验结果基本一致,值得大范围推广应用。
4 三维激光扫描仪应用发展趋势
三维激光扫描技术是目前地形变化监测中应用的典型代表,而且相应的单点就显得并不是非常重要,虽然传统的单点测量也能很好的反映地形变化的各项信息,但对于单点的变形信息则难以准确给出,主要原因是传统单点测量很难在前后两期测量点云数据之间找到我们平时所说的同名点。所以,通过应用三维激光的扫描点的基准点,插值就可以获得很多同名点,这样就可以比较我们感兴趣的任何一点,这样,我们就解决了点云上任何一点的形变值。
使用最小二乘方法拟合、三次样条差值拟合等数学方法对曲线进行拟合。我们在拟合的曲线y=f(x),x每间隔1cm取一个变形点,这样就可以得到线上每一个点的变形,达到我们线变形的研究目的。
现场踏勘及方案的制定、控制测量、野外数据的采集、内业数据处理(点云数据拼接、去噪、平滑、精简、建模)。
三维激光扫描仪在我国的应用时间已经超过了10年,经过大量的试验和研究,各项技术愈发先进,再加上各种新技术和计算机软件技术快速发展,三维激光扫描仪已经被广泛应用在各大领域。测量的精度也在不断提升,通过给各项新技术的应用,各项数据后期处理的越来越简单,逐步实现了智能化、自动化、准确化。但三维激光扫描仪在应用时,需要基于激光技术的传播和人力来搭架,才能获得相应点云数据。由于三维激光扫描系统由硬件和配套软件组成,软件方面的不足也在很大程度上影响了三维激光扫描仪的精度。而多数情况下,三维激光扫描仪在地形变化监测过程具有很多优势,再加上各种信息的不断完善,三维激光扫描仪技术会在未来的地形变化监测中得到更加广泛的应用。
5 结语
综上所述,本文结合工程实例,深入分析了基于三维激光扫描仪的地形变化监测,研究结果表明,在地形变化监测中,通过应用基于三维激光扫描仪可大幅度提升地形变化监测的准确性。在工程应用当中,可根据工程需要,依据以上实验结果,适当调整扫描仪测量分辨率和工作距离,以便达到工程要求。
参考文献:
[1]徐加盼,王秋霞,邓羽松等.基于三维激光扫描技术的花岗岩风化土体侵蚀表面特征研究[J].水土保持学报,2016,30(2):14-19.
[2]郑欣.三维激光扫描技术在水利工程坝址地形图测绘中的应用[J].广东水利水电,2017,(11):46-49.
[3]刘希林,张大林,唐川.基于三维激光扫描的崩岗沟道侵蚀与坡向发育及其侵蚀量计算[J].应用基础与工程科学学报,2016,(5):914-923.
[4]褚宏亮,殷跃平,曹峰等.大型崩滑灾害变形三维激光扫描监测技术研究[J].水文地质工程地质,2015,42(3):128-134.
[5]吴彩保,陈西江,吴浩.顾及最佳搜索邻域的三维激光扫描变形监测方法[J].武汉理工大学学报,2016,38(9):72-76.
猜你喜欢
音乐教育与创作(2023年10期)2023-11-16 10:04:54
昆明医科大学学报(2021年6期)2021-07-31 07:40:36
科学(2020年5期)2020-11-26 08:19:24
小哥白尼(趣味科学)(2019年2期)2019-04-17 02:18:18
现代工业经济和信息化(2016年22期)2016-08-23 11:55:32
水利科技与经济(2016年8期)2016-04-22 03:41:38
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:34
水科学与工程技术(2016年6期)2016-02-27 13:29:13
现代营销·经营版(2015年3期)2015-04-20 06:46:58
发明与创新(2015年30期)2015-02-27 10:39:52
