高超声速飞行器横侧向气动布局准则研究
2018-05-26 02:19:43闵昌万
宇航总体技术 2018年3期
闵昌万
(中国运载火箭技术研究院, 北京 100076)
0 引言
从20世纪30年代奥地利的欧根·桑格尔夫妇提出助推滑翔的思想,以及1949年钱学森提出了一种升阻比为4的高超声速助推滑翔飞行器以来,高超声速飞行器所带来的经济和军事意义,引起世界各国尤其是美国的极大关注。在之后的相当长的时间内,高超飞行技术得到了高速、持续发展。
值得注意的是,上述稳定性判据是根据劳斯判据中特征方程的末项系数大于零获取,只是系统动稳定的必要条件之一,而非充要条件。该判据只能反映系统的静稳定性,然而系统静稳定并不代表系统是动稳定的。如果按照系统动稳定的充要条件,通过求出系统的全部特征根,判断系统的稳定性,依据目前高性能计算工具,虽然可以快速得到数值解,但单纯的数值求解无法在系统特征根和气动特性参数之间建立明显联系,无法提出具体气动特性的要求,会让气动布局在迭代过程中失去方向和目的,进而失去指引气动布局设计的意义。
本文基于飞行器横侧向运动模型,获取了现有的开环横侧向稳定判据和闭环横向控制稳定判据。针对该稳定性判据在评价横侧向系统稳定性中不完善的地方,本文通过具体例子对满足判据条件的飞行器仍然出现横侧向振荡发散的现象进行详细说明,同时对这一现象进行机理分析,从理论推导中给出这一现象的预测评价判据,进而进一步完善了横侧向闭环稳定判据。最后通过与数值解对比,对预测评价判据的有效性进行了说明。
1 高超声速飞行器外形多样性
经过几十年的发展,高超声速飞行器已经形成了浩大的族谱,有人驾驶/无人驾驶,重复使用/单次使用,不同速域范围,不同的飞行任务……气动外形令人眼花缭乱。
1.1 HL-10
NASA兰利研究中心的HL-10(Horizontal Lander 10)[9]主要为验证升力体特性,为翼身融合体布局,机身翼型采用大厚度反弯翼型,74°后掠三角翼平面布局,尾部有3个垂尾,两侧垂尾对称偏转提供俯仰控制能力,差动偏转提供滚转控制能力,中间垂尾控制偏航方向和速度的制动(见图1)。
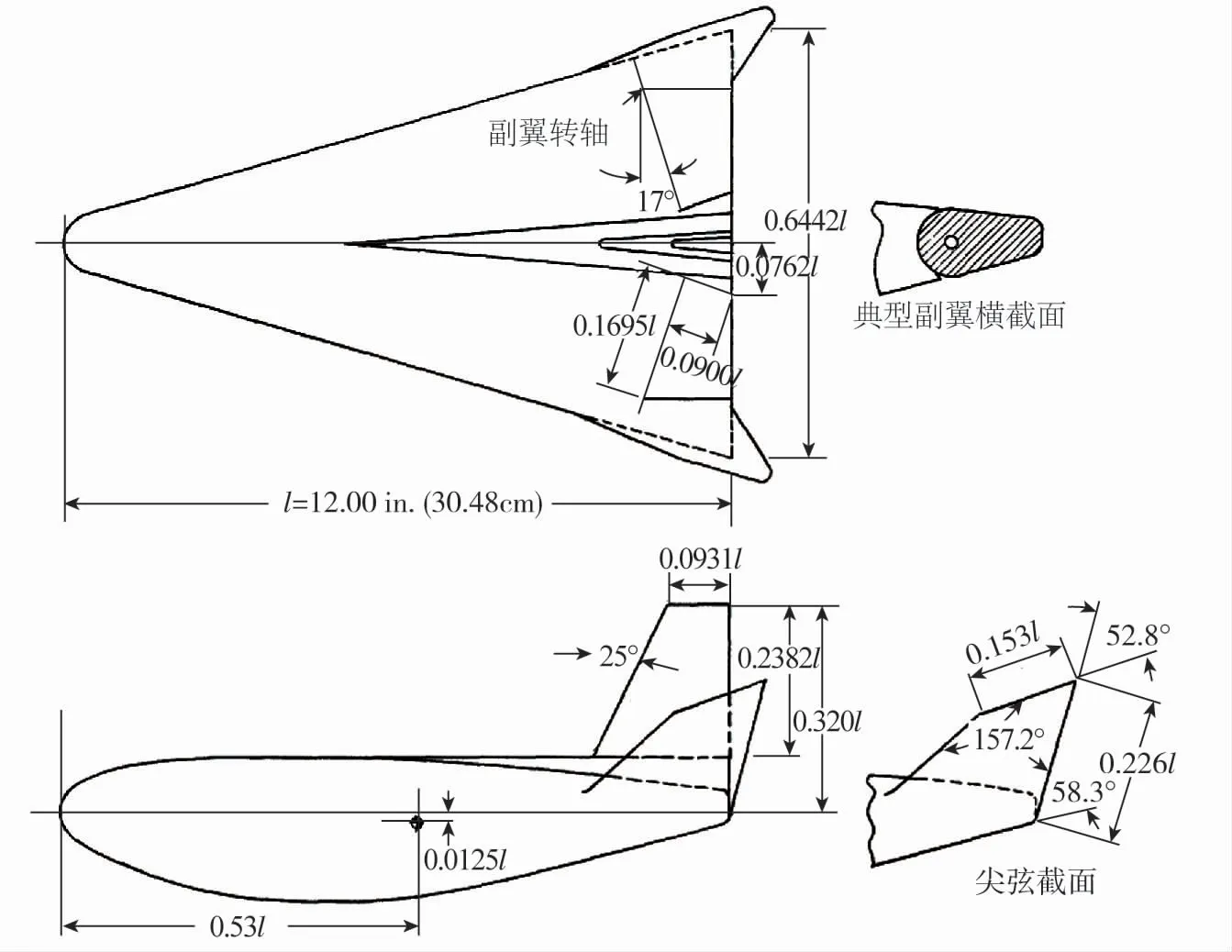
图1 HL-10气动布局Fig.1 HL-10 aerodynamic configuration
1.2 X-15
在美国航空航天技术发展史上,以火箭发动机为动力的X系列飞行器占据特殊的地位,而X-15[10]飞行器是其中最成功的。在气动布局方面,X-15包括机翼、水平尾翼、楔型垂直尾翼、升降舵以及方向舵(见图2)。为提高侧向稳定性,在迎风面增加了腹鳍,后续发现增加腹鳍带来的滚转静不稳定,增加了横侧向控制,为解决这一问题,X-15最终去掉了腹鳍。

图2 X-15气动布局Fig.2 X-15 aerodynamic configuration
1.3 X-33
X-33[11]基本构型为升力体式,飞行器控制翼面包括垂直方向舵、倾斜立尾以及机身襟翼(见图3)。两个垂直方向舵为飞行器提供航向控制,两个机身襟翼与带有内外升降副翼的机翼为飞行器提供纵向和横向控制并辅助航向控制。

图3 X-33气动布局Fig.3 X-33 aerodynamic configuration
1.4 HTV-2
HTV-2[12]采用了乘波体设计与优化技术,升阻比在3.15~4之间,堪称历史上最先进的气动外形,具有流线的机身,全机只有两个FLAP控制舵面,是历史上飞行器控制舵面最少的飞行器(见图4)。
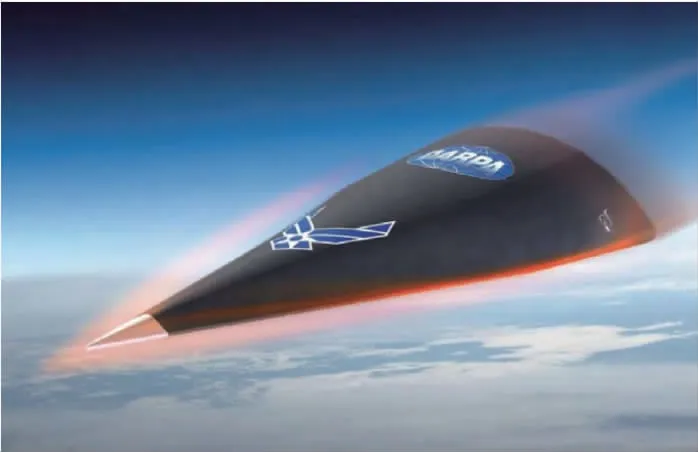
图4 HTV-2气动布局Fig.4 HTV-2 aerodynamic configuration
2 基于控制性能的气动布局设计
高超声速飞行器的外形如此“纷繁多样”,到底是什么因素决定了其外形?高超飞行器普遍遵循的法则是什么?
高超声速飞行器完全依靠气动力进行飞行和控制。在总体参数和飞行剖面确定的情况下,其气动外形一经确定,其控制特性就相应确定。因此,气动布局设计必须一开始就考虑到飞行器的可控性,在气动设计过程中,就从控制的角度来评价飞行器的设计。另一方面,将飞行器看做一个被控对象,分析飞行器的动力学特性,不同的飞行器动力学特性可采用不同的控制策略,特别是不同控制策略下气动特性对飞行器操纵性、稳定性的影响,从而有针对性地提出气动设计的目标。
因此,从气动稳定性和可操纵性上赋予飞行器良好的气动特性,使控制系统设计具有良好的基础,是气动外形设计应该遵循的准则。对于高升阻比外形,只能通过升力改变速度方向,需要通过倾侧实现侧向机动,横侧向气动布局设计要实现飞行器对倾侧角的有效控制。
3 横侧向运动模型
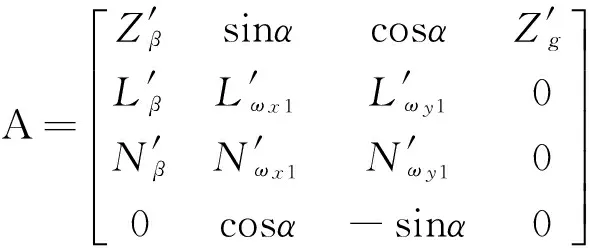
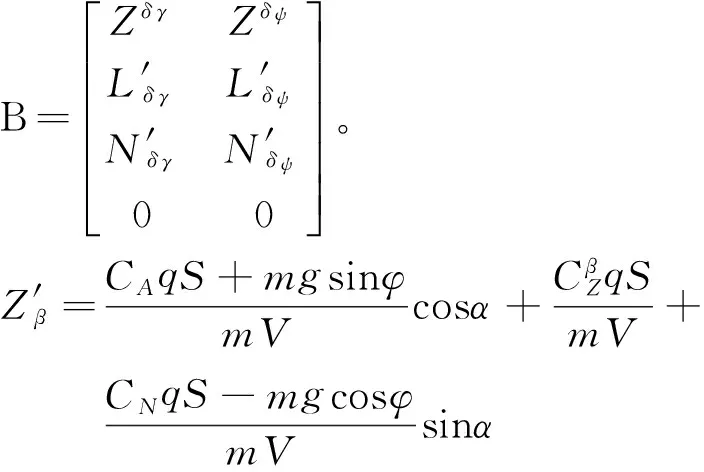
基于经典力学、综合质心动力学和运动学,以及绕质心运动学和动力学方程,得到飞行器横侧向运动非线性模型,在“小扰动”假设前提下,获得的线性化模型见式(1)。

(1)
其中,

4 系统稳定性分析依据
对于线性系统,稳定的充分且必要条件是:系统特征方程的所有根均具有负实部。
如果单纯应用该充要条件判别线性系统的稳定性,需要求出系统的全部特征根。但只进行简单的数值求解,无法在系统特征根和气动特性参数之间建立明显联系,无法提出具体气动特性的要求,会让气动布局在迭代过程中失去方向和目的,进而失去指引气动布局设计的意义。
要给出气动布局设计的要求,需要有明确的气动特性参数指标要求。根据劳斯判据,系统稳定的充分且必要条件是特征方程各项系数所构成的主行列式及其顺序主子式全部为正。当系统特征方程的次数较高时,判据表达式非常复杂,得到的应用也较少。在稳定性的判定准则中,通常根据劳斯判据中系统稳定的必要条件给出,其中特征方程的末项系数大于零是重要的判据,这个判据通常被认为是通用稳定性判定准则[7]。和其他判别式相比,这个判定准则更精确地反应了静稳定性的需求,在气动布局设计中,发挥重要作用。
5 横侧向静稳定性分析
5.1 横侧向模态特点

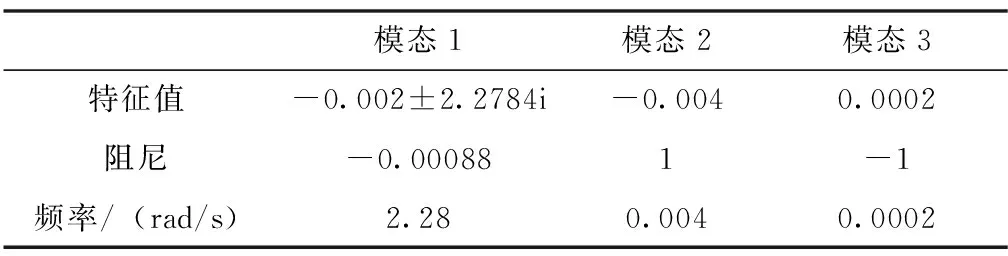
表1 横侧向开环运动的模Table 1 The motion mode of the open-loop system
其中,一对共轭复根代表振荡运动模态,称为荷兰滚模态,大负根代表滚转快速阻尼模态,小负根代表缓慢螺旋运动模态。表2给出了与各模态对应的特征向量各项的幅值,显示各模态对状态量的影响情况。

表2 横侧向开环系统特征向量各项的幅值Table 2 The eigenvector for the motion mode of theopen-loop system
综合表1、表2可以看出,飞行器横侧向的运动主要分为3个典型的运动模态:滚转模态、荷兰滚模态和螺旋模态。飞行器横侧向运动由此3种典型模态线性叠加而成。
滚转模态是飞行器在横侧向扰动运动中初始阶段的运动模态,它描述了飞行器滚转角速度和滚转角的运动情况,主要影响滚转运动。
荷兰滚模态是在滚转模态运动之后,共轭复根所表现的振荡运动,是偏航和滚转运动的组合体,对滚转运动、偏航运动和侧滑均有影响。
螺旋模态是在横侧向扰动运动后期才起主要作用的模态,表现为偏航角和倾斜角单调而缓慢的变化。螺旋模态为带滚转、几乎无侧滑的缓慢的偏航运动。
在横侧向的3个运动模态中,荷兰滚模态最重要,它在很大程度上表征了横侧向的动稳定性。下面主要针对荷兰滚模态,给出静稳定性判据要求。
5.2 开环静稳定性
在横侧向状态方程式(1)中略去重力项和阻尼项,获得的运动方程见式(2)。
(2)

(3)
(4)

5.3 闭环静稳定性
高超声速飞行器,一般采用差动舵偏转来调节横侧向,因此需要进一步研究滚动控制时的横侧向闭环稳定性,该特性通常使用参数LCDP[4,15]表示。
滚动通道由差动舵进行控制时,选取差动舵信号为:
δγ=ka1γv+ka2ωx1,ka1,ka2>0
(5)
基于式(2)和式(5),在得到的横侧向运动的闭环特征方程中应用劳斯判据,得到系统闭环静稳定的必要条件为式(6):
(6)
忽略惯量积项,获得闭环横侧向偏离判据见式(7):
(7)
LCDP主要描述差动舵控制滚动通道时,横侧向的闭环静稳定性。差动舵控制时,差动舵通过产生滚转力矩对滚动通道进行有效控制,而差动舵同时会产生偏航力矩影响偏航通道,由于横侧向互相耦合,该表达式真实地反映了差动舵控制对横侧向的综合影响。
5.4 小结
6 横侧向稳定性再认识
需要指出的是,上述基于劳斯判据中末项系数大于零获取的稳定性判据只是对系统静稳定性的要求,而系统稳定的充要条件是对动稳定性的要求。静稳定性仅反映飞行器在平衡状态受到扰动,在扰动源撤除后,飞行器本身具有恢复到原平衡状态的趋势,而动稳定性才能反映飞行器的受扰运动在扰动源撤除后最终能否恢复到原平衡状态。
6.1 横侧向震荡发散现象
6.1.1 飞行器A
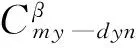
-0.975,LCDP=-0.072,差动舵到滚转角速率的传递函数见式(8):
(8)
从差动舵到滚转角速率的根轨迹图见图5,开环零极点见图6,可以看出开环荷兰滚模态不稳,从荷兰滚极点引出的根轨迹落在实轴上,增大增益可以明显增加荷兰滚阻尼,同时可以增稳荷兰滚模态,此时反馈滚转角速率可以明显改善荷兰滚模态的阻尼。
闭环之后的定点仿真图见图7所示,可以看出差动舵控制下,横侧向可以实现闭环稳定。
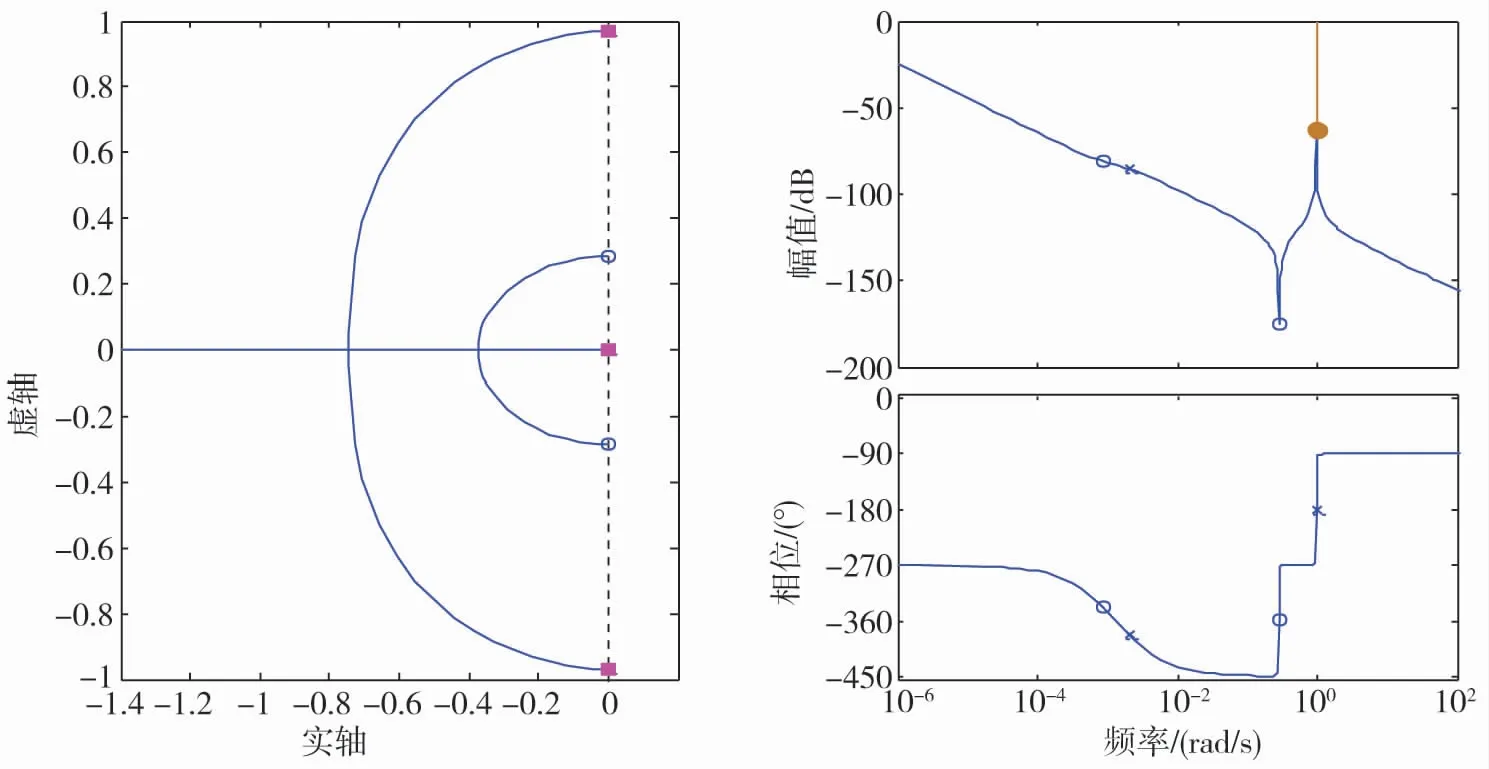
图5 飞行器A:差动舵到滚转角速率的根轨迹图Fig.5 Aircraft A:the root loci from roll rate to aileron
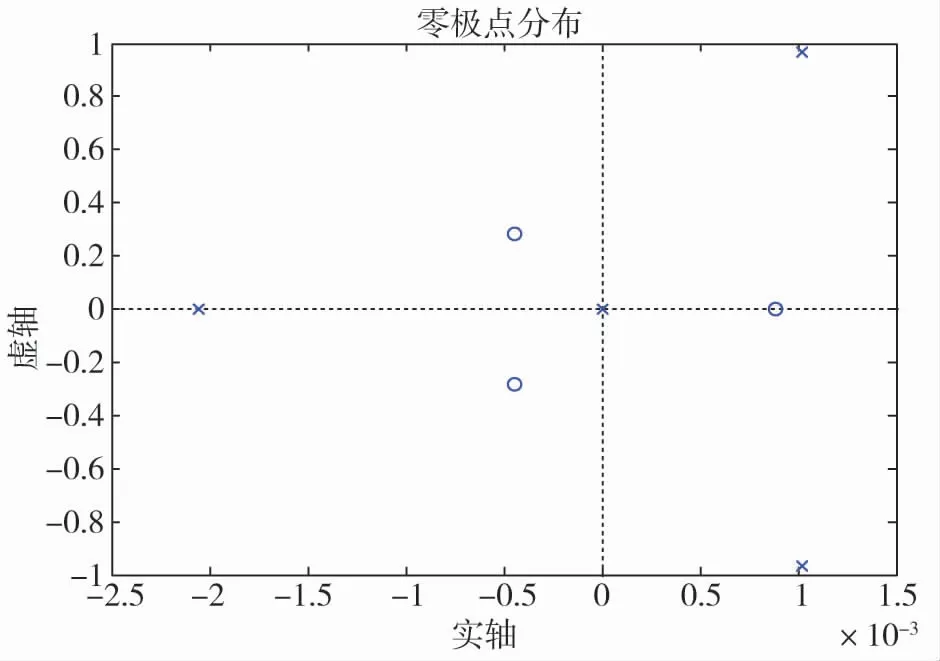
图6 飞行器A:差动舵到滚转角速率的零、极点Fig.6 Aircraft A:the zero and pole from roll rate to aileron
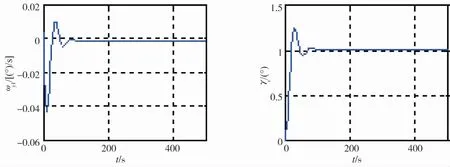
图7 飞行器A:考虑角速率和倾侧角闭环之后的定点仿真Fig.7 Aircraft A:lateral-direction motion due to aileron deflection
6.1.2 飞行器B
(9)
从差动舵到滚转角速率的根轨迹图见图8,开环零极点见图9。可以看出开环荷兰滚模态稳定,而反馈滚转角速率之后,从荷兰滚极点引出的根轨迹逆时针接近零点,在左半平面靠近极点处,增益极小,接近零点处,增益极大,反馈角速率无法实现改善荷兰滚阻尼,会出现荷兰滚负阻尼的情况。
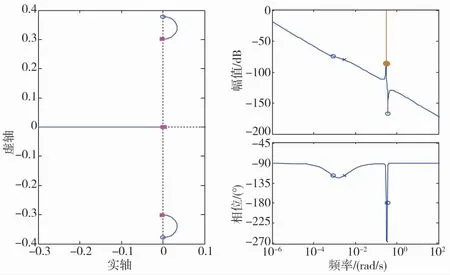
图8 飞行器B:差动舵到滚转角速率的根轨迹图Fig.8 Aircraft B:the root loci from roll rate to aileron
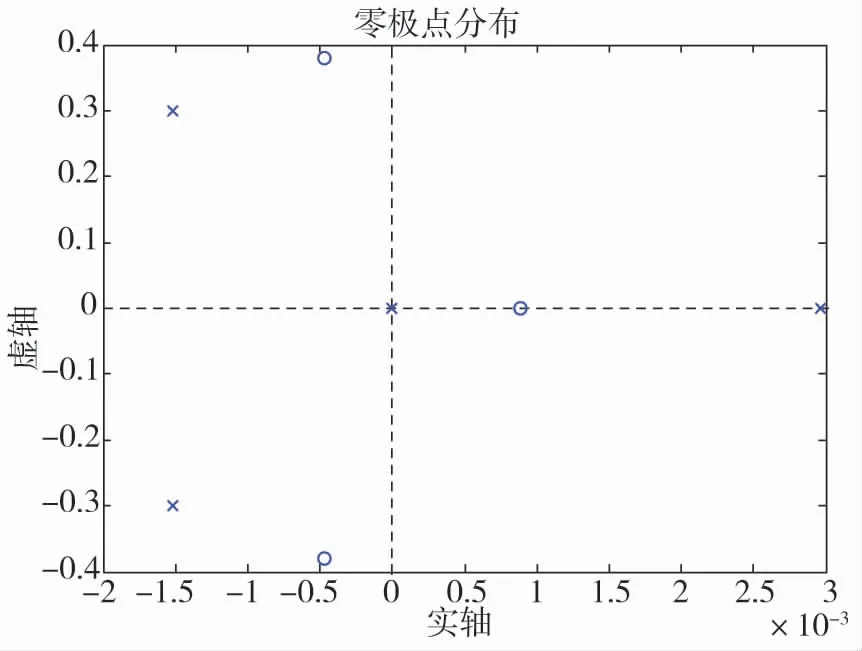
图9 飞行器B:差动舵到滚转角速率的零、极点Fig.9 Aircraft B:the zero and pole from roll rate to aileron
闭环之后的定点仿真图图10所示,可以看出对于飞行器B,横侧向在差动舵控制下,侧滑角出现振荡发散的情况,无法实现闭环稳定。
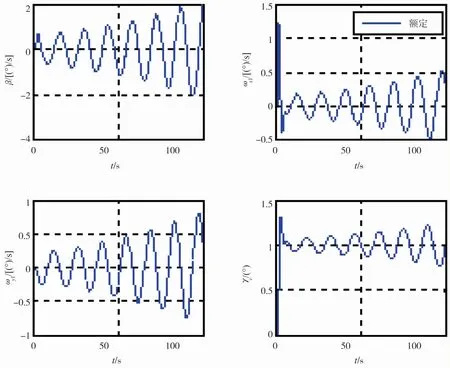
图10 飞行器B:考虑角速率和倾侧角闭环之后的定点仿真Fig.10 Aircraft B:lateral-direction motion due to aileron deflection
6.2 横侧向根轨迹特点
在横侧向方程中,差动舵到滚转角速率的开环传递函数可表示为式(10)。
(10)
其中,TR、Ts分别是滚转模态和螺旋模态的时间常数,不考虑阻尼项的影响,滚转模态为零。
横侧向状态方程中不考虑阻尼项,获得差动舵到滚转角速率的传递函数表达式见式(11)。
(11)
由于Zg出现在常数项,量级为10-3,主要影响螺旋模态,对荷兰滚频率的影响可以忽略,同理对二次零点的频率影响也可以忽略;Zδa的量级为10-6,对阻尼项会有较小影响,对频率的影响可以忽略。因此忽略Zδa和Zg,获得差动舵到滚转角速率的开环传递函数,见式(12)。
(12)

结合横侧向方程3个模态根分布的特点,Evans[16]提到根据根轨迹出射角法则,得出横侧向随着反馈增益的增加,闭环二次极点是逆时针接近二次零点的,得出的根轨迹示意图如图11所示。可以看出,在阻尼较小的情况下,如果零点位于极点之上,必然会出现负阻尼的情况;如果零点位于极点之下,就可以避免出现负阻尼情况。因此问题的关键在于明确零、极点在虚轴投影的位置关系。
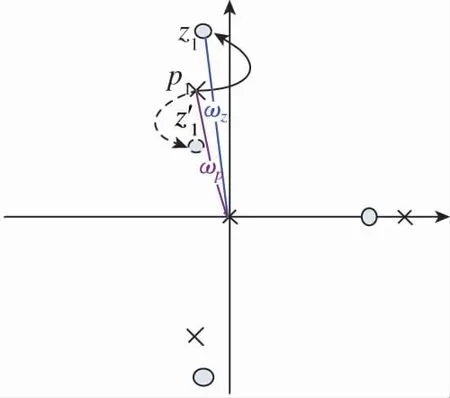
图11 横侧向根轨迹示意图Fig.11 The diagram of the root loci for lateral-directional
6.3 闭环动稳定性评价判据
对于二次零、极点,表达式如式(13)所示,
(13)

相比式(12)可得:
二次零点频率:
(14)
二次极点频率:
(15)
由式(14)和式(15)得:
ωz-ωp=
(16)
将式(16)平方得式(17):
(17)
ωz-ωp≤ωp,ωz,即是零极点之间的距离与距原点的距离相比为小量,忽略式中的小量乘积的高阶项,得到式(18)。
ωz-ωp=
(18)
按照式(18)的预测公式,沿着飞行剖面,随机选取特征点,数值计算荷兰滚模态对应零、极点的位置关系,获得频率之差,以及应用该预测判据获得的估计值,如图12所示。可以看出用该评价判据基本可做到定量判断零极点的距离关系,说明该判据的有效性。
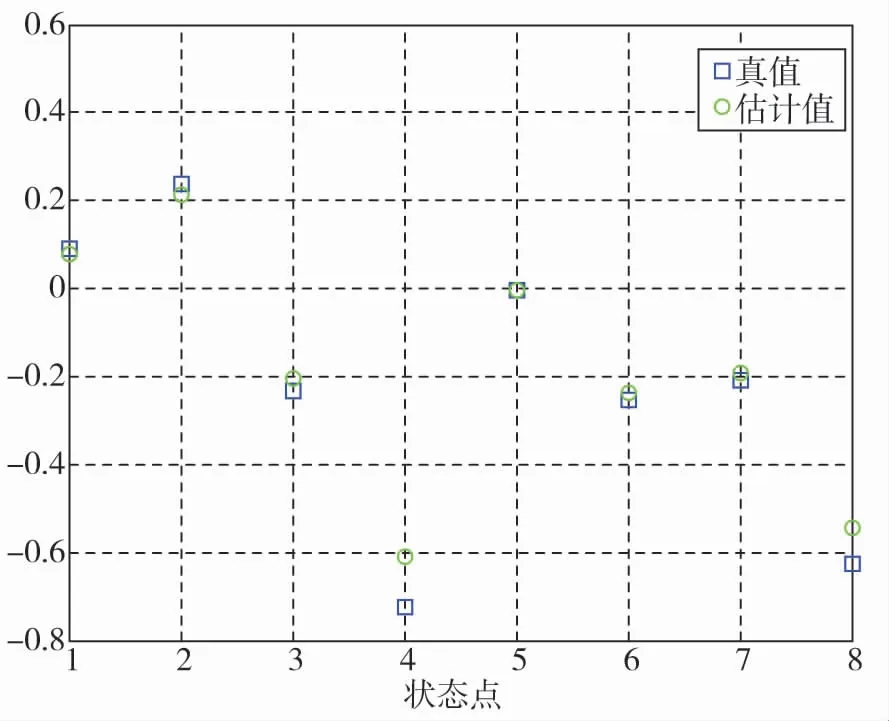
图12 ωz-ωp的预测值与真值的对比Fig.12 Comparison between predictive value and ture value of ωz-ωp
6.4 气动布局要求
7 结论
飞行器的气动性能决定了其控制品质,为从气动稳定性和可操纵性上赋予飞行器良好的控制特性,从气动设计之初就保证飞行器具有良好的控制基础,需要在飞行器操稳特性与气动特性参数之间建立关系,明确飞行器可控的气动设计准则,并将该设计准则融入到气动外形设计的全过程。本文结合横侧向运动模型,针对现有稳定性判据在评价横侧向稳定性中不完善的地方,从机理上分析了出现问题的原因,从理论推导中给出这一现象的预测评价判据,进一步完善并提出3条横侧向闭环稳定判据,为气动布局评估提供依据。

参考文献
[1] Lee H P, Chang M, Kaiser M K. Flight dynamics and stability and control characteristics of the X-33 technology demonstrator Aircraft[R]. AIAA 1998-4410, 1998.
[2] Thompson R A.Review of X-33 hypersonic aerodynamic and aerothermodynamic development[C].NASA Langley Research Center,NASA,2000.
[3] Vinh N X, Busemann A, Culp R D. Hypersonic and planetary entry flight mechanics[R]. NASA STI/Recon Technical Report A, 1980.
[4] Seltzer R M. Investigation of current and proposed aircraft departure susceptibility criteria with applica-tion to future fighter aircraft[R]. NADC-90048-60, 1990.
[5] Herbst W B. Future fighter technologies[J]. Journal of Aircraft, 1980, 17(8): 561-566.
[6] Skow A M, Porada W M. Development of improved high-alpha-yaw departure criteria[C].High Angle-of-Attack Technology Conference, Dryden Research Facility,1992.
[7] Lutze F H, Durham W C, Mason W H. Develo-pment of lateral-directional departure criteria[R]. AIAA 1993-3650, 1993.
[8] 祝立国, 王永丰, 庄逢甘, 等. 高速高机动飞行器的横航向偏离预测判据分析[J]. 宇航学报, 2007,28 (6): 1550-1553.
[9] Ladson C L. Aerodynamic characteristics of the HL-10 manned lifting entry vehicle at a Mach number of 10.5[R].NASA TMX-1054.N70-78337.
[10] Moul M T. Preliminary investigation of dynamic lateral stability characteristics of a configuration of the North American X-15 research airplane[R]. NACA RM L56L27, 1957.
[11] Murphy K J, Nowak R J, Thompson R A, et al. X-33 hypersonic aerodynamic characteristics[J]. Journal of Spacecraft and Rockets, 2001, 38(5): 670-683.
[12] Walker S, Sherk J, Shell D, et al. The DARPA/AF falcon program: the hypersonic technology vehicle# 2 (HTV-2) flight demonstration phase[C].15thAIAA International Space Planes and Hypersonic Systems and Technologies Conference, 2008: 2539.
[13] Moul M T, Paulson J W. Dynamic lateral behavior of high-performance aircraft[R]. NACA RM-L58E16,
1958.
[14] Hill A, Anderson D, Coughlin D, et al. X-33 trajectory optimization and design[R]. AIAA 1998-4408, 1998.
[15] Evans W R. Control system synamics[M]. New York: McGraw-Hill, 1954.
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56
中学生数理化·七年级数学人教版(2021年9期)2021-11-20 06:11:52
解放军健康(2017年5期)2017-08-01 06:27:42
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
知识经济·中国直销(2016年2期)2016-11-07 09:33:42
光学精密工程(2016年3期)2016-11-07 09:03:52
通信电源技术(2016年1期)2016-04-16 04:57:35
西北工业大学学报(2015年1期)2016-01-19 03:29:56
电测与仪表(2015年24期)2015-04-09 12:04:48