
一种轻型电动剪叉式升降平台结构设计与分析
2018-05-24 07:08赵新虎李成群
机械工程与自动化 2018年2期
赵新虎,李成群
(华北理工大学 机械工程学院,河北 唐山 063210)
0 引言
剪叉式升降平台是一种作垂直运动的单自由度起重机械,其主要包括起升平台、底座、驱动执行部件和剪叉装置,通过驱动部件使剪叉装置进行折叠,从而使起升平台上的物体升降至不同高度。剪叉式升降平台具有结构紧凑稳固、故障率低、运行可靠、安全高效、维护简单方便等优点,广泛应用于物流、生产流水线、仓库和自动化等领域。根据升降机构属性的不同剪叉式升降平台主要分为3类:刚性升降机构、柔性升降机构和刚柔双属性升降机构[1]。本文提出了一种安装于AGV小车(自动导引运输车)上的以滚珠丝杠为驱动执行装置的轻型剪叉式升降平台,其行程大、结构简单、精度高,可在任意高度自锁。
1 轻型剪叉式升降平台结构与工作原理
该剪叉式升降平台安装于AGV小车上,主要由上下平台、剪叉机构、丝杠驱动装置、拉伸式位移传感器组成,其结构示意图如图1所示。升降平台主要设计参数如表1所示。

1-电机;2-丝杠;3-稳定杆;4-外剪叉臂;5-拉伸式位移传感器; 6-AGV小车;7-下平台;8-内剪叉臂;9-中间座; 10-丝杠螺母安装座;11-连接杆;12-上平台
该平台的工作原理如下:通过电机1输出扭矩,联轴器驱动丝杠2旋转,此时与丝杠螺母固连的丝杠螺母安装座10向右运动,在连接杆11作用下内剪叉臂8表现为张开状态,连接杆11的两端在中间座9所开的长槽内形成移动副,从而带动上平台12上升;下降过程通过控制电机反转即可实现。在整个工作过程中,升降平稳,噪声低,同时在升降过程中因为丝杠的自锁功能使平台可以停留在任意高度;通过安装的拉伸式位移传感器实现对平台高度的实时测量,并反馈给控制器从而实现调节使平台达到所需的高度;分别在初始高度和最大高度两个极限位置设置了行程开关,在到达这两个位置时电机停止转动。
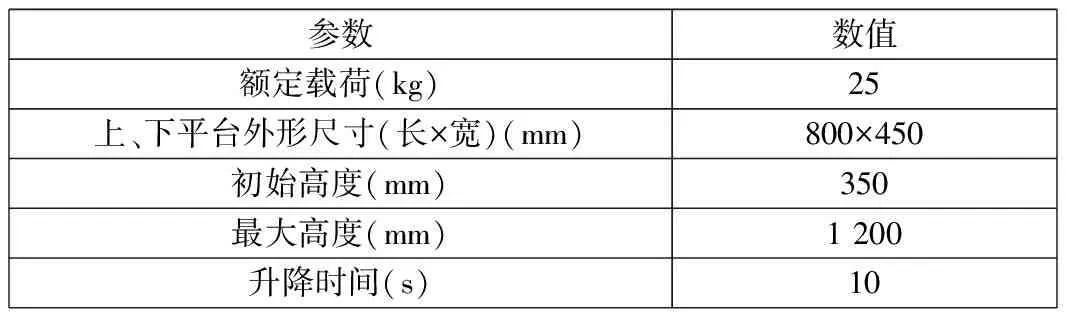
表1 升降平台主要设计参数
2 丝杠螺母传动机构的设计
升降平台升降重物时的举升力通过电机驱动滚珠丝杠时的扭矩(丝杠将该扭矩转化为水平的轴向力)获得[2],电机输出的扭矩是保证平台完成升降动作的必要条件,丝杠及丝杠螺母的自锁功能是保证平台停留在任意高度的必须条件[3]。
2.1 升降机构推力的确定
以整个剪叉机构为平衡对象,主动力为载重力和丝杠推力,铰接约束为理想约束,根据虚位移原理作用于质点系的主动力在任何位移中所作虚功的和等于零[4],即:
∑(Xiδxi+Yiδyi+Ziδzi)=0.
(1)
其中:Xi、Yi、Zi为作用于质点系mi的主动力Fi在直角坐标系坐标轴上的投影;δxi、δyi、δzi为虚位移δri在直角坐标系坐标轴上的投影。
图2为剪式丝杠升降机构简图。图2中,A、B、C、D、J、K分别为铰支点,Q、P为滑块,M为载荷作用点,S为丝杠推力F作用点。由图2可得:
-GδMy+FδSx=0.
(2)
其中:G为额定载荷;F为丝杠推力;δMy为M点虚位移在直角坐标系y轴上的投影;δSx为S点虚位移在直角坐标系x轴上的投影。

图2 剪式丝杠升降机构简图
由图2分析可知M点y方向的坐标为:
My=2Lsinα.
(3)
其中:L为剪叉臂长杆上两个销孔的中心距;α剪叉臂与水平面的夹角。
式(3)经变分运算得:
δMy=2Lδαcosα.
(4)
其中:δα为假设的无限小的夹角α变量。
丝杠推力作用于S点的销轴处,则S点方向的x坐标为:
Sx=N-Lcosα.
(5)
其中:N为底座上两个销孔之间的中心距。
式(5)经变分运算得:
δSx=Lδαsinα.
(6)
将式(4)、式(6)代入式(2)中,整理得:
F=2Gcotα.
(7)
式(7)为丝杠推力F与平台载重力G的关系式。在平台载重力G=25 kg和剪叉杆与水平面的夹角最小值α=12°的情况下,即可求出丝杠最大推力F=2 353 N。
2.2 丝杠及螺母尺寸参数确定
丝杠升降过程中所需的速度为0.1 m/s~0.2 m/s。应力系数ψ的取值范围为1.2~2.5,本文取ψ=1.7。螺纹副许用压强pp=7 N/mm2~10 N/mm2,取pp=8.5 N/mm2。
按耐磨性计算丝杠螺纹中径d2,其计算公式为:
(8)
将数值代入式(8)计算得:d2≥10.2 mm。
查机械设计手册并计算得到丝杠的尺寸参数:公称直径d=16 mm、牙顶间隙ac=0.5 mm、外螺纹中径d2=14.5 mm、内螺纹大径D4=17 mm、外螺纹小径d3=12 mm,内螺纹小径D1=13 mm。
丝杠采用梯形单头螺纹,其螺距p与导程s相等,取p=s=3 mm,基本牙型高H1=1.5 mm,螺母高度H=ψd2=24.65 mm,取H=30 mm,则螺纹圈数n=H/p=10,牙根宽b=0.65p=1.95 mm。
3 丝杠螺母传动机构的校核
3.1 丝杠螺母机构的自锁性校核
螺纹升角λ的计算公式为:
(9)
将数值代入式(9)计算得:λ=3.77°。
当量摩擦角的计算公式为:
(10)
其中:γ为螺纹牙型角,取γ=30°;f为摩擦因数,本丝杠螺母机构材料为钢对青铜,摩擦因数f=0.08~0.10,取f=0.09。
将数值代入式(10)计算得:ρ′=5.33°。λ<ρ′,故丝杠螺母机构的自锁性可靠。
3.2 杠螺母机构的强度校核
螺纹摩擦力矩的计算公式为:
(11)
将数值代入式(11)计算得:Mt=2 733 N·mm。
丝杠强度的当量应力计算公式为:
(12)

3.3 螺纹剪切强度校核
螺纹剪切强度计算公式为:
(13)
将数值代入式(13)计算得:τ=2.26 N/mm2。螺纹牙的许用切应力τp=0.6σp=42.6 N/mm2,τ<τp,螺纹剪切强度符合要求。
3.4 螺母弯曲强度校核
螺母弯曲强度计算公式为:
(14)
将数值代入式(14)计算得:σb=5.22 N/mm2。螺纹牙许用弯曲应力σbp=(1~1.2)σp=(71~85.2) N/mm2。σb<σbp,螺母弯曲强度符合要求。
4 驱动电机选型
丝杠的临界转速为:
(15)
其中:lc为丝杠两支承间的最大距离,取lc=360 mm;μ1为与螺杆的端部结构有关的系数,取μ1=2。将数值代入式(15)计算得:nc=4 444 r/min。
螺母的转速n1为:
(16)
根据设计要求,丝杠的轴向移动速度v1=25 mm/s。将数值代入式(16)计算得:n1=500 r/min。n1≪nc,所以丝杠螺母机构在运动过程中不会产生横向振动。
丝杠螺母机构所需的驱动功率N1为:
N1=Mqv1/955 000.
(17)
已知螺母丝杠机构的驱动力矩Mq=Mt=2 733 N·mm,将数值代入式(17)计算得:N1=1.43 kW。故选用输出功率为1.5 kW、输出转速为500 r/min的驱动电机。
5 结束语
本文设计了安装于AGV小车上的剪叉式升降机构,通过虚位移原理计算出整体升降机构所需要的推力,然后确定了丝杠螺母机构的具体尺寸参数,并进行校核,得出满足条件的丝杠螺母机构,并对驱动电机进行了选型。
参考文献:
[1] 杜干.升降平台升降机构研究现状分析[J].机械工程与自动化,2013(2):205-207.
[2] 魏辉.关于剪式升降台比较分析[J].科技风,2009(11):191-192.
[3] 刘恒.螺杆螺母副驱动的剪式机构的设计[J].机电工程技术,2010,39(8):107-108.
[4] 哈尔滨工业大学理论力学教研室.论沦力学[M].北京:高等教育出版社,1996.
猜你喜欢
防爆电机(2022年4期)2022-08-17
南方农机(2022年10期)2022-05-14
有色金属加工(2020年4期)2020-08-20
思维与智慧·上半月(2020年4期)2020-04-13
制造技术与机床(2019年11期)2019-12-04
中国眼镜科技杂志(2019年9期)2019-11-11
发明与创新·小学生(2019年8期)2019-08-27
制造技术与机床(2019年1期)2019-01-14
制造技术与机床(2017年8期)2017-11-27
高中生学习·高二版(2017年9期)2017-10-25
