
桁架机器人动态特性分析及实验研究
2018-05-24 07:08陈骏,陈威
机械工程与自动化 2018年2期
陈 骏,陈 威
(安徽博微长安电子有限公司,安徽 六安 237010)
0 引言
机器人在运行状态时其性能具有不稳定性,使用条件和环境的变化都会对其造成影响,因此有必要对机器人的动态特性进行分析和研究。
本文对桁架机器人进行模态分析,在此基础上进行系统动力学特性实验,对采集的信号进行处理分析,研究工作速度和负载情况下对机器人动态特性的影响。
1 桁架机器人结构组成
桁架机器人由本体、驱动系统和控制系统组成,如图1所示。其中本体包括横梁、导轨、十字滑座、立柱和基座等[1]。

图1 桁架机器人本体结构示意图
作为本文研究对象的桁架机器人可实现沿X、Z轴方向的直线运动和手爪沿Z轴的摆动。其直线运动由交流伺服电机通过行星减速机驱动斜齿轮与固定于X向横梁上的齿条作滚动,驱动十字滑座和Z向滑枕沿导轨快速运动[2]。
2 桁架机器人动态性能分析
2.1 模态分析基本理论
机械系统的动态特性即系统结构的动态特性,是表示结构动态特征的基本物理量,一般指结构的固有频率和振型[3]。通常采用模态分析的方法研究结构的动态特性,在有限元软件中的操作步骤依次为模型构建、加载求解、扩展模态和模态后处理。为提高仿真精度并缩短求解时间,需对模型结构进行简化和特征删除[4]。
2.2 运行状态下的机器人模态分析
选取运行状态下的机器人进行模态分析,在ANSYS Workbench中提取Modal模块导入三维模型文件,十字滑座和Z向滑枕选取铝合金材料,其他均为结构钢,立柱与地面之间添加固定约束作为边界条件。求解得到的桁架机器人前6阶固有频率和振型如表1和图2所示。

表1 桁架机器人前6阶固有频率
由图2可知,1阶振型表现为机器人整机沿Y轴方向的来回摆动;2阶振型表现为机器人整机沿X轴方向的摆动;3阶振型表现为机器人整机绕竖直中心的扭转;4阶振型表现为机器人X向横梁沿Y轴方向的摆动;5阶振型表现为机器人Z向滑枕沿X轴方向的摆动和X向横梁的上下摆动;6阶振型表现为机器人整机绕竖直中心的扭转与Z向滑枕沿Y轴方向摆动的耦合振动。
3 桁架机器人系统动力学特性实验研究
3.1 实验目的
机器人Z向滑枕末端的振动与齿轮齿条啮合有关,为排除机构耦合的影响,研究工作速度和负载变化情况下的机器人系统动力学特性。
3.2 实验变量控制及信号采集
机器人手爪系统中安装有两套手爪,采用改变抓取工件的质量和抓取组合方式可以实现控制负载。抓取组合方式如表2所示。其中:①为质量3.5 kg的工件;②为质量1.5 kg的工件。
振动信号采集系统如图3所示,机器人系统的振动信号由加速度传感器获取,将其转换成电压信号经输出同轴电缆线输入数据采集卡中进行A/D转换,最终传送至计算机中以波形图显示。
3.3 实验方案
在动力学特性实验中,机器人必须以相同的运动轨迹完成整个行程,且在温度、湿度相对稳定的环境内完成整个实验。由于实验条件的限制以及为了保护传感器,将传感器连同基座粘接在十字滑座上。
默认水平向右为X轴正方向,设定机器人运动轨迹为从原点O′沿X轴正方向运动2 000 mm至A点停止,如图4所示。采集由原点O′至A点过程中机器人系统三个方向的加速度数据。
在不同实验条件下采集振动信号进行处理分析,不同实验条件设置如表3所示。
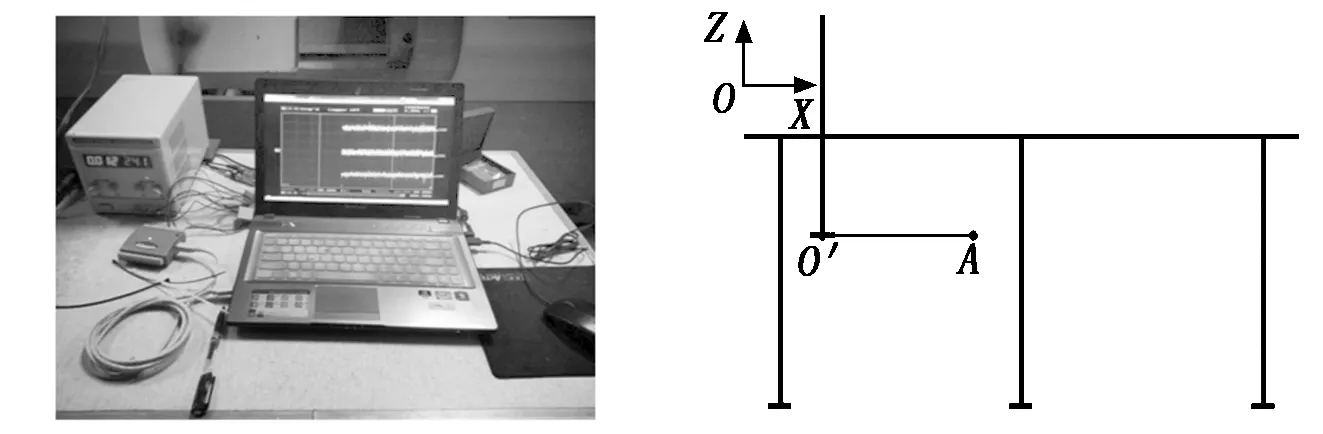
图3振动信号采集系统图4桁架机器人实验运动轨迹
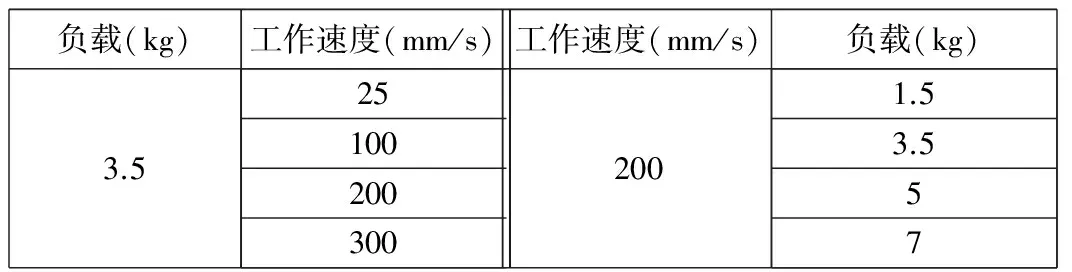
表3 动力学特性实验条件
3.4 振动信号时域分析
通过时域分析可以提高信噪比,求取振动信号波形在不同时刻的相似性和关联性。
当机器人抓取负载为3.5 kg,得到工作速度分别为25 mm/s、100 mm/s、200 mm/s、300 mm/s时系统三个方向的加速度时域波形,如图5所示。当机器人工作速度为200 mm/s,得到抓取负载分别为1.5 kg、3.5 kg、5 kg、7 kg时系统三个方向的加速度时域波形,如图6所示。

图5 不同工作速度下机器人系统加速度时域波形
由图5和图6可知,机器人系统在三个方向上的加速度幅值随工作速度和负载的增大而增大,运行过程中有冲击成分的存在;工作速度变化对机器人动态性能的影响比负载变化更加明显。

图6 不同负载下机器人系统加速度时域波形
4 结语
本文以桁架机器人为研究对象,采用有限元软件对运行状态下的机器人进行模态分析,得到系统易受影响的频率范围及结构变形趋势。在此基础上进行机器人系统动力学特性实验,采集不同实验条件下的振动信号进行时域分析,得到机器人系统动力学特性变化趋势,通过比较可知工作速度变化对机器人动态性能的影响比负载变化对机器人动态性能的影响更加明显。
参考文献:
[1] 权占群,张树礼.桁架机械手及在柔性加工自动线上的应用[J].金属加工,2014 (12):23-25.
[2] 丛明, 石会立, 宋鸿升,等. 桁架机械手动态特性的有限元分析[J]. 组合机床与自动化加工技术,2008(6):19-22.
[3] 苗登雨. 重载搬运机器人结构设计与动态性能分析优化[D]. 合肥:合肥工业大学, 2014: 39-40.
[4] 王鑫. 四自由度高速重载工业机器人动态特性的研究[D]. 秦皇岛:燕山大学, 2014: 29-34.
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18
昆明医科大学学报(2022年3期)2022-04-19
建材发展导向(2021年9期)2021-07-16
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
制造技术与机床(2019年11期)2019-12-04
军事运筹与系统工程(2019年4期)2019-09-11
建材发展导向(2019年5期)2019-09-09
中国港湾建设(2017年11期)2017-12-19
制造技术与机床(2017年4期)2017-06-22
雷达学报(2017年6期)2017-03-26
