
轮边电机驱动差动转向车辆动力学控制
2018-05-24 07:37:48余卓平高乐天章仁燮
同济大学学报(自然科学版) 2018年5期
余卓平, 高乐天, 章仁燮, 熊 璐
(1. 同济大学 汽车学院, 上海 201804; 2. 同济大学 新能源汽车工程中心, 上海 201804)
差动转向车辆是利用两侧车轮不同驱/制动力产生的车轮转速差从而实现转向的车辆.差动转向机构最早应用于履带车辆,后因其具有结构简单紧凑、可靠性高、空间利用率高、机动性强、可实现原地转向等特点被逐步推广应用于轮式车辆[1].由发动机驱动的传统差动转向车辆大多采用功率分流结构,它是一种典型的底盘动力传动结构,由传动箱、自动变速器、液压差速转向系统、轮边减速机构等组成[2].为了有充足的动力进行转向,发动机往往工作在高转速高功率区间,因此噪音较大.随着车辆电驱动技术的进步,差动转向车辆也逐步向电动化的方向发展.电机驱动系统集成度高、响应快且转矩精确可控,能实现动力分散控制,从而进一步提高了车辆的机动性与灵活性[3],并且能够在军事用途中实现静默行驶.
目前大多数针对具有差动转向形式的车辆或轮式机器人的控制研究都是基于非完整约束假设进行的,认为车辆质心处只有纵向速度而没有侧向速度,将差动转向车辆简化为刚体进行控制,从而实现对期望轨迹的跟踪.文献[4]根据自由度将轮式机器人进行分类,并采用动态反馈线性化实现差动转向轮式机器人的轨迹跟踪,但控制器维数高且闭环系统存在奇异点.董文杰等[5]将轮式机器人局部或全局变化成链式系统,设计了一维动态控制器,克服了动态反馈线性化的缺点,解决了将运动学约束转化为链式系统的一类非完整系统轨迹跟踪问题.为了使轮式机器人对期望轨迹全局渐进跟踪,张扬名[6]在建立非完整约束轮式机器人运动学和动力学模型的基础上,采用全局终端快速滑动模态的思想设计了一个能够渐进镇定航向角误差的控制率,并采用Lyapunov方法设计了一个能够渐进镇定平面坐标误差的控制率,通过两者结合,最终实现了轮式机器人对期望轨迹的全局渐进跟踪控制.文献[7]基于轮式机器人的运动学与动力学模型,采用反步法构造出一种简单的中间虚拟反馈变量,同时结合Lyapunov直接法设计出时变反馈控制律,并且证明了其全局稳定性.从动力学的角度来看,决定车辆运动规律的根本因素是轮胎与地面间的作用力.因此,一些学者利用轮胎与地面间的附着模型来对差动转向车辆进行控制.Kang等[8]采用分层控制的思想对六轮独立驱动差动转向车辆进行了研究,上层控制器对车速及横摆角速度进行跟踪,下层控制器通过轮胎模型来直接控制轮胎力.
一般具有差动转向形式轮式机器人的行驶工况都在低速条件下,因此鲜有研究考虑轮胎的滑移对差动转向车辆控制的影响.然而,由于差动转向车辆的特殊结构及特性,要完成转向,轮胎必然会产生滑移,尤其是在车辆动态特性较强或车辆行驶在松软路面的情况下.另一方面,很多差动转向车辆动力学控制的研究都是针对无人车,直接跟踪上层给出的参考路径,将车辆纵向需求速度与转向需求差速转化为车辆两侧车轮的轮速后分别进行轮速控制,而有人驾驶车辆驾驶员给出的是纵向加速度需求,因此这种控制方法不适用于有人驾驶车辆.为此,本文设计了纵向力矩与转向两侧轮速差解耦控制的控制器.首先,分析了差动转向六轮车的二自由度动力学参考模型,基于中性转向特性确定参考横摆角速度;然后,设计了差动转向车辆动力学控制器,其中上层利用横摆角速度闭环抵消轮胎滑移的影响,采用抗积分饱和算法,通过控制横摆力矩实现车辆对期望横摆角速度的跟踪,下层将纵向力与横摆力矩分配至左右两侧电机;最后,通过仿真及实车试验验证了所设计控制算法的有效性.
1 车辆动力学模型
1.1 车身动力学模型
本文研究的差动转向六轮车同一侧车轮由同一个电机驱动,具有相同转速.为了简化车辆的动力学模型,假设车辆行驶在绝对平坦的道路上并仅受到道路作用在车辆上的力,忽略由空气动力学产生的各种力与力矩作用.本文采用如图1所示的非线性三自由度车辆模型,车辆在大地坐标系X-Y上运动,用来描述车辆运动的车身坐标系为x-y,其原点位于车辆质心.

图1 车身动力学模型
由此可以得到车身的动力学模型微分方程,如下所示:
(1)
式中:m为整车质量;vx为车辆质心处纵向速度;vy为车辆质心处侧向速度;γ为车辆横摆角速度;Fxli、Fxri、Fyli、Fyri分别为第i轴左、右侧轮胎接地处所受到的纵向力和侧向力;Iz为车辆绕z轴的转动惯量;B为轮距;a、b、c分别为前、中、后轴距质心的距离,正表示当前轴在质心位置之前,负表示当前轴在质心位置之后.
1.2 车轮动力学模型
由于车辆两侧车轮分别由一个轮边电机进行独立控制,因此只需考虑一侧车轮的动力学模型.车轮动力学模型如图2所示.

图2 车轮动力学模型
假设单侧每个车轮与地面的接触情况相同,以转向时内侧车轮为例对一侧车轮建立动态运动微分方程,如下所示:
(2)
式中:ω为车轮转动角速度;j=l, r分别表示左、右侧车轮;Jω为单个车轮转动惯量;R为车轮有效半径;λ为轮胎滑移率;Tbj为作用于该侧电机的制动转矩;Tj为该侧电机的驱动力矩;itr为电机到车轮减速器的传动比.假设在车速缓变的情况下,可以将车轮动态运动微分方程改写为
(3)
1.3 轮胎模型
车辆受到的力归根结底是轮胎与地面间相互作用产生的轮胎力.Burckhardt轮胎模型可以简单地表达出轮胎所受纵向力与轮胎滑移率和路面峰值附着系数的关系.Jin等[9]对Burckhardt轮胎模型进行了改进,增加了轮胎模型表达式的参数,从而更加精确地体现了轮胎与地面间作用的力学特性.改进后的Burckhardt轮胎模型表达式如下所示:
(4)
式中:λc为滑移率;fλ(λc)为名义纵向轮胎力;θ1~θ5为参数.θ1表征峰值附着系数;θ2决定fλ-λc曲线在起点处的斜率;θ3、θ4为正,决定fλ峰值周围的下降值;θ5用来调整fλ非峰值处的曲线斜率,但不影响原点处的斜率和fλ的最大值.在合理选取上述参数的情况下,该轮胎模型可以准确地反映轮胎在各种路面上的非线性特性,如图3所示.图3中μ为路面峰值附着系数.
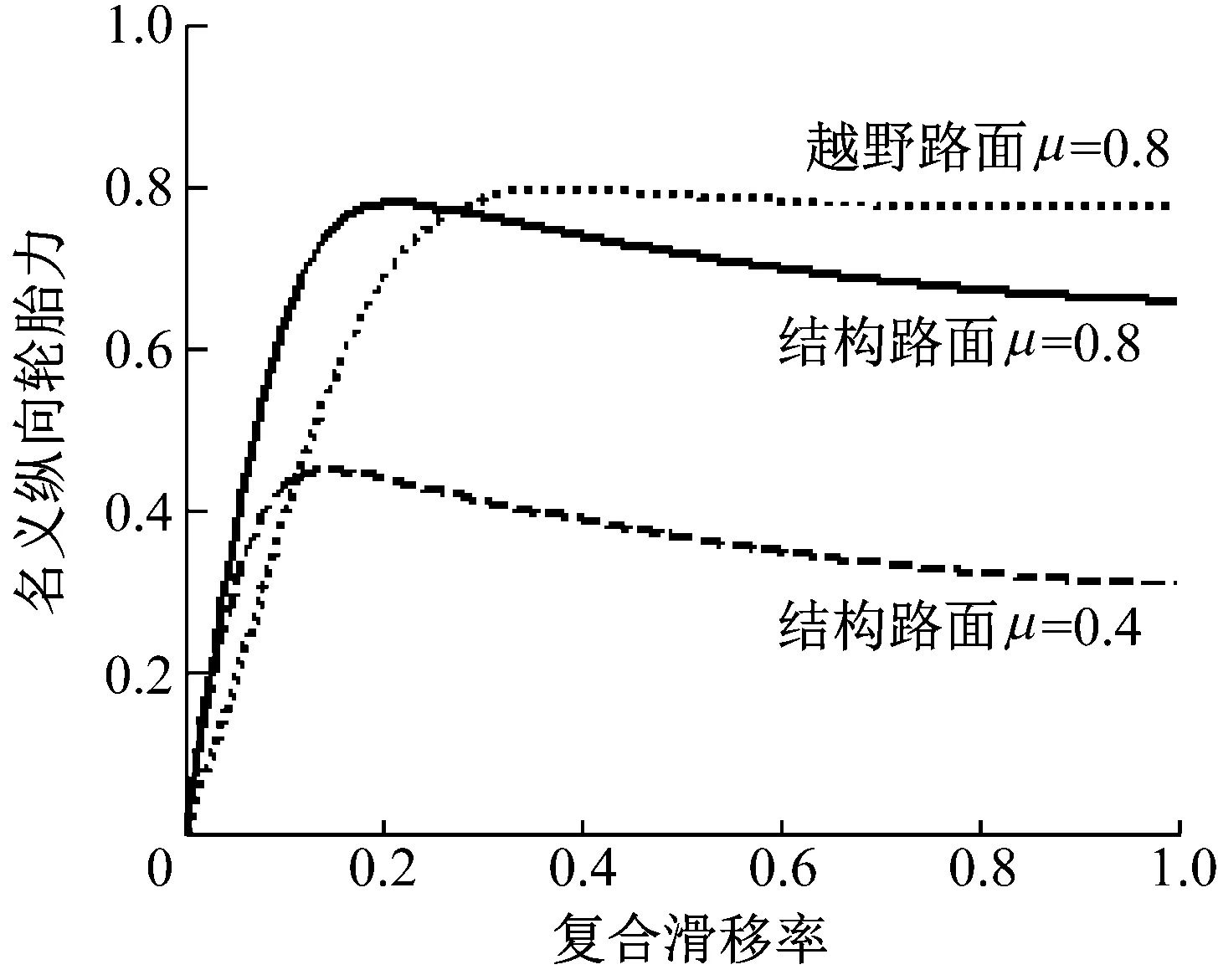
图3 轮胎模型特性曲线
2 控制器设计
差动转向车辆无机械式转向机构是依靠左右两侧车轮轮速差产生的横摆角速度来完成转向,因此需要根据驾驶员意图及车辆动力学特性来解析参考横摆角速度.现有的对于无人或有/无人一体化差动转向车辆大多是将上层参考车速和参考曲率转化为两侧参考轮速来进行控制[10],但是对于有驾驶员驾驶的差动转向车辆,如果纵向运动控制采用速度控制,则纵向力与油门踏板位置无直接对应关系,使得驾驶员主观感受较差.因此,本文设计了如图4所示的动力学控制架构,上层基于抗积分饱和反馈控制跟踪参考横摆角速度,下层力矩分配模块将所求得的纵向力和横摆力矩分配到左右两侧,实现车辆对驾驶员意图的准确跟踪.图4中,α为加速踏板开度,δdr为方向盘转角,γdes为驾驶员期望横摆角速度,TD为广义需求纵向转矩,Mz为作用在整车上的横摆力矩,Ti、To分别为内、外侧电机转矩.

图4 动力学控制器结构
2.1 驾驶员意图解析
2.1.1加速意图解析
为使车辆直线行驶时与传统车辆驾驶感受相近,本文采用能够准确反映驾驶员加速意图的线性加速踏板策略,即驱动工况下电机转矩负荷系数与加速踏板开度成线性对应关系,表达式如下所示:
LD=100%α
(5)
式中:LD为驱动工况下电机转矩负荷系数.
根据加速踏板开度求解电机转矩负荷系数,并结合电机的外特性即可求出当前驾驶员广义需求纵向转矩,如下所示:
(6)
式中:Tmax为电机最大驱动转矩;n为电机转速;nb为电机基速.
2.1.2期望横摆角速度计算
为了简化车辆动力学模型以得到用于控制器设计的参考模型,本文作出以下几点假设:假设车辆的纵向速度不变;轮胎工作在线性区域;忽略车辆的俯仰和侧倾,只考虑车辆在x-y平面内的运动;忽略空气阻力、滚动阻力等因素的影响,并假设车辆质心处纵向速度为两侧轮胎接地点处纵向速度的平均值.
由以上假设,可以推导出差动转向六轮车辆动力学微分方程[11],如下所示:
(7)

γ=B(kx1+kx2+kx3)(ky1+ky2+ky3)Δvx/{B2(kx1+kx2+kx3)(ky1+ky2+ky3)+4(ky1+ky2+
ky3)(a2ky1+b2ky2+c2ky3)-4(aky1+
(8)
与基于阿卡曼转向的传统车辆不同,差动转向车辆方向盘与车辆转向半径间无几何关系,因此方向盘转角与参考横摆角速度的关系可以根据需求来人为确定.为了使差动转向车辆在正常行驶过程中与传统车辆的操纵性相似,本文设定驾驶员方向盘转角对应期望的转向半径.也就是说,在不考虑滑移时,方向盘转角线性对应左右车轮接地点纵向速度差与纵向车速的比值,即认为稳态时满足
(9)
式中:ks为常数,可根据需求车辆的最小转向半径和方向盘转角的最大值δdrmax确定,同时需考虑驾驶员感受和车辆的稳定性.因此,差动转向六轮车稳态横摆角速度增益为
(10)
其中,
A=B(kx1+kx2+kx3)(ky1+ky2+ky3)
C=B2(kx1+kx2+kx3)(ky1+ky2+ky3)+
4(ky1+ky2+ky3)(a2ky1+b2ky2+c2ky3)-
4(aky1+bky2+cky3)2
D=-2(aky1+bky2+cky3)m
基于阿卡曼转向车辆二自由度单轨模型计算的稳态横摆角速度增益为
(11)
式中:L为轴距;K为稳定性因数.将式(10)与式(11)类比可知,D/C为差动转向六轮车的稳定性因数.因此,差动转向车辆中性转向的稳态横摆角速度增益为
(12)
将式(12)选作理想的控制目标.
此外,期望横摆角速度的选取还需考虑车辆侧向稳定性.一般认为,车辆在侧向加速度达到0.8μg时便会失稳.根据侧向加速度与车速和横摆角速度的关系,期望横摆角速度应满足
(13)
最终得到的期望横摆角速度
(14)
2.2 轮速差跟踪控制
假设参考横摆角速度为γref,将由式(14)计算得到的期望横摆角速度γdes作为参考横摆角速度,即:
γref=γdes
(15)
则可以得到两侧车轮的参考轮速差
Δωref=Bγref
(16)
由车轮动力学模型(见式(2)),可以得到转向时内侧车轮动态及外侧车轮动态,如下所示:
(17)
(18)
式中:下标i、o分别表示内、外侧车轮.
根据式(17)与式(18)即可得到转向工况下两侧车轮轮速差误差的动态,如下所示:
(19)
由轮胎纵向力模型(4)可知,随着滑移率的变化,峰值附着系数有界且其一阶导数有界,因此其满足局部利普希茨条件,即:
(20)
式中:Ll为轮胎纵向力模型的利普希茨常数.
设计抗积分饱和控制器作为横摆力矩控制律,如下所示:
(21)
式中:η1为车辆在当前状态下两侧电机所能产生的最大横摆力矩;η2、η3为控制器设计参数,均需大于零;ε为中间变量.
可以证明在该控制律的作用下,系统将被镇定到原点.

Mz=-η1
(22)
此时根据式(19)可得

(23)
因此只要满足
(24)

(2) 当积分未饱和时,控制律(21)可写为如下形式:
(25)
由以上分析可知,所设计的抗积分饱和控制律充分考虑执行器能力,在需求控制输入超过执行器能力时以最大执行器能力对系统进行修正,在执行器能力范围内则以需求控制输入对系统进行控制.
2.3 参考轮速差修正
若以式(14)得到的期望横摆角速度计算参考轮速差后直接作为轮速差跟踪控制的输入,则会产生横摆角速度稳态跟踪误差,这是由于差动转向车辆在转向时轮胎必然会产生较大的滑移而造成的.因此,为了使车辆能够准确跟踪上层期望横摆角速度信号,需要充分考虑差动转向车辆动力学特性,对参考横摆角速度进行调整从而修正参考轮速差,弥补车轮滑移产生的系统跟踪误差.
基于抗积分饱和控制律设计,采用如下横摆角速度修正策略:
(26)

2.4 转矩分配
转矩分配模块分别计算车辆两侧电机转矩,同时满足驾驶员驱动力需求及转向横摆转矩需求.由式(6)计算出驾驶员驱动转矩需求TD,正常直线行驶工况下,转矩等比例地分配到两侧电机上,即:
(27)
在转向过程中,为了不影响驾驶员的加速需求,同时满足需求横摆转矩,设计如下转矩分配方法:
(28)
然而,当需求纵向力较大时,由于电机外特性的限制,驾驶员的需求纵向力与需求横摆转矩会产生冲突.由于差动转向车辆无机械转向机构,从安全角度考虑,必须保证车辆在任何工况下均具有足够的转向能力,因此当电机无法同时满足驾驶员加速需求与横摆转矩需求时,即To>Tmax时,应优先满足横摆转矩需求,此时按照下式进行分配:
(29)
3 仿真及试验验证
3.1 仿真验证
基于Matlab/Simulink软件搭建了仿真验证平台.由于研究对象为有人驾驶差动转向车辆,因此需要建立驾驶员模型模拟驾驶员操作信号.驾驶员模型可以看作是速度控制器,输入为期望车速和实际车速,输出为油门踏板和制动踏板开度.本文使用反馈控制器建立如下所示的驾驶员模型:
(30)

3.1.1转向盘转角阶跃输入
参考车速8 m·s-1,经计算得到的参考横摆角速度0.28 rad·s-1,仿真结果如图5所示.
由图5b可以看出,在车速一定的情况下,车辆的横摆角速度能够稳定地跟踪上层给出的期望横摆角速度信号,验证了动力学控制器的有效性.在转向时,两侧电机不同的驱动转矩产生了横摆转矩使车辆进行转向,由于转向过程中阻力的作用,两侧电机转矩之和大于零,用于平衡阻力.

a 纵向车速

b 横摆角速度

c 电机转矩
3.1.2转向盘转角正弦输入
参考车速8 m·s-1,转向盘转角正弦输入仿真结果如图6所示.

a 纵向车速

b 横摆角速度

c 电机转矩
从图6可以看出,驾驶员模型控制车速保持在参考值附近,正弦输入的转向盘信号产生了正弦形状的参考横摆角速度,实际横摆角速度能够较好地跟踪参考信号值,2个电机也输出了相应转矩来保证车速的稳定.
3.2 试验验证
实车试验平台为轮边电机驱动六轮差动转向车辆,左右两侧各由一个永磁电机驱动,经由减速器将力矩传递给车轮,电机能量由蓄电池和増程器共同提供,结构简图如图7所示.
车辆参数如表1所示.轮边电机外特性如图8所示.试验场地如图9所示.
3.2.1稳态圆周工况
设计稳态圆周工况考察控制算法对稳态参考横摆角速度的跟踪能力,试验结果如图10所示.
由于车速由驾驶员操纵油门和制动踏板来进行控制,因此无法完全稳定到恒定值.由图10a可以看出,试验过程车速基本稳定在5 m·s-1.从图10b可以看出,车辆横摆角速度可以较好地跟踪参考横摆角速度.虽然受差动转向车辆本身执行器及低速下越野轮胎特性的影响,车辆的横摆角速度出现了一定的跳动,但是基本维持在参考横摆角速度附近.

图7 车辆结构简图

表1 车辆参数

图8 轮边电机外特性

图9 试验场地

a纵向车速b横摆角速度

c电机转矩d电机转速
图10稳态圆周工况试验结果
Fig.10Experimentresultsofsteadycirclingtest
3.2.2蛇行工况
由于尚未有对差动转向车辆操纵性的评价标准,因此本文参考乘用车操纵稳定性评价国标GB/T 6323.1—94中蛇行试验设计了相应试验,期望车速5 m·s-1,试验结果如图11所示.从图11b可以看出,车辆横摆角速度可以快速准确地跟踪时变参考横摆角速度,平均误差小于0.02 rad·s-1,虽然存在一定的误差,但仍可以很好地满足驾驶员转向意图,完成蛇行试验.图11c显示电机实际转矩比仿真结果要大,这是由轮胎模型在大侧偏角下的误差引起的.试验结果证明,所设计的动力学控制器有较好的瞬态跟踪能力.

a纵向车速b横摆角速度
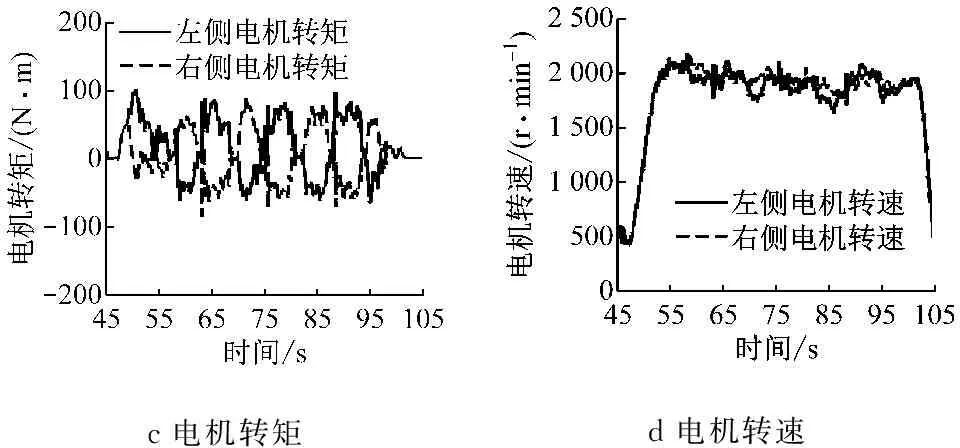
c电机转矩d电机转速
图11蛇行工况试验结果
Fig.11Experimentresultsofslalomtest
4 结语
本文针对有人驾驶轮边电机驱动差动转向车辆设计了动力学控制器,建立了六轮差动转向车辆二自由度参考模型,分析了车辆动力学特性并根据驾驶员输入设计了理想的参考横摆角速度.将纵向力需求与差动车辆转向时的轮速差需求进行了解耦控制.动力学控制器上层基于抗积分饱和方法设计的横摆转矩控制律跟踪参考轮速差,从而实现对期望横摆角速度的跟踪,并且考虑轮胎滑移对车辆的影响,对参考轮速差进行了修正;下层力矩分配层将纵向力和横摆转矩分配到左右两侧驱动电机,实现对驾驶员意图的准确跟踪.最后,通过仿真和试验验证了控制算法的有效性.
参考文献:
[1] WEISS K R. Skid-steering[J]. Automobile Engineer, 1971,61(4):22.
[2] 孙勇, 李文哲. 双流传动履带车辆转向机构的研究现状及发展趋势[J]. 农机化研究, 2008(3):235.
SUN Yong, LI Wenzhe. Actualities and developing tendency of turning mechanism of tracked vehicles with twin driving[J]. Journal of Agricultural Mechanization Research, 2008(3):235.
[3] 张韬懿, 王田苗, 吴耀, 等. 全地形无人车的设计与实现[J]. 机器人, 2013, 35(6):657.
ZHANG Taoyi, WANG Tianmiao, WU Yao,etal. Design and realization of an all-terrain unmanned ground Vehicle[J]. Robot, 2013, 35(6):657.
[4] D’ANDREA-NOVEL B, CAMPION G, BASTIN G. Control of nonholonomic wheeled mobile robots by state feedback linearization[J]. International Journal of Robotics Research,1995, 14(6):543.
[5] 董文杰, 霍伟. 链式系统的轨迹跟踪控制[J].自动化学报, 2000, 26(3):310.
DONG Wenjie, HUO Wei. Trajectory tracking control of chained systems[J]. Acta Automatica Sinica, 2000, 26(3):310.
[6] 张扬名. 非完整约束下的移动机器人跟踪控制问题的研究[D]. 湘潭:湘潭大学, 2013.
ZHANG Yangming. Tracking control for nonholonomic mobile robots[D]. Xiangtan: Xiangtan University, 2013.
[7] BENAOUMEUR I, LAREDJ B, REDA H E A,etal. Backstepping approach for autonomous mobile robot trajectory tracking[J]. Indonesian Journal of Electrical Engineering and Computer Science, 2016, 2(3):478.
[8] KANG J, KIM W, LEE J,etal. Skid steering-based control of a robotic vehicle with six in-wheel drives[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2010, 1(D11):1.
[9] JIN C, XIONG L, YU Z,etal. Path following control for skid steering vehicles with vehicle speed adaption[C]// SAE World Congress. Detroit:[s.n.], 2014: 1-11.
[10] 熊璐, 黄少帅, 陈远龙,等. 轮式差动转向无人车运动跟踪控制的研究[J]. 汽车工程, 2015, 37(10):1109.
XIONG Lu, HUANG Shaoshuai, CHEN Yuanlong,etal. A research on motion tracking control for unmanned ground vehicle with wheeled skid-steering[J]. Automotive Engineering, 2015, 37(10):1109.
[11] ZHANG Y, HU J, LI X. Steady-state characteristics of skid steering for wheeled vehicles[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2014, 228(9):1095.
猜你喜欢
小读者(2019年24期)2020-01-19 01:51:36
汽车观察(2019年2期)2019-03-15 06:00:34
中学生数理化·八年级物理人教版(2017年6期)2017-11-09 06:00:30
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
电子制作(2017年10期)2017-04-18 07:23:16
电子制作(2017年23期)2017-02-02 07:17:24
发明与创新·中学生(2016年7期)2016-05-14 04:08:26
火控雷达技术(2016年1期)2016-02-06 02:18:01
中国铁道科学(2015年4期)2015-06-21 06:46:06
电测与仪表(2015年24期)2015-04-09 12:04:48
