电动汽车充电站研究综述
2018-05-21 03:41
汽车文摘 2018年5期
电动汽车充电站是未来新能源汽车必不可少的部件,总结最新的关于电动车充电的技术文献,可以发现,充电站建设主要聚焦三大类型,一是基于不同能源的充电站,二是充电站的能源管理,三是充电站的位置确定。不同能用充电站包括了一般的电能、太阳能、风能和机械飞轮储能等能源。充电站的能源管理是提升充电效率的关键,包括脉冲电流充电站、充电调度、充电站数据与经济分析。本文介绍的充电站位置设计包括电动车路径上充电站设计、城市充电站网络优化与配置。
1 基于不同能源的充电站
1.1 电动汽车太阳能充电站的整合与管理[1]
本文针对不确定性情景,旨在提出一个潜在模型,将太阳能的电力输送到电动汽车充电站的路线设计。使用MATLAB和SIMULINK建立了一个包含电气控制系统的专用系统。设计了一个系统(图1),用于改善电动汽车充电点与电池存储系统之间的相互作用,其中电气控制系统开发正确的占空比,以稳定和调节DC/DC电源转换站的电压。

图1 太阳能充电/储存系统
在MATLAB/SIMULINK上模拟200 kWh的太阳能系统容量,其中添加了200 kWh存储系统以平衡较高温度和较低辐照度下的能源需求。该存储系统由太阳能系统充电,燃料发电机还增加了200kWh的容量,在能量下降到60%后对存储系统充电。存储系统在干扰期间向电动车辆充电站供电并且减少来自太阳能系统的发电量。电动汽车充电站最大功耗为103.50千瓦时,由四个充电点组成。使用绝缘栅双极晶体管(IGBT)进行DC/DC电源转换,其中MATLAB函数编码环境用于控制IGBT的频率并稳定太阳能系统的电压。通过使用低通滤波器,可以缓解尖峰和瞬态,实现电能质量。研究温度、辐照度和过载如何影响系统的功率调节。具体而言,调查了电压不稳定性和瞬态,可编程保护断路器来保护充电终端。实施控制功率转换系统和分析控制系统中的功率流。
系统中的损耗降低到1%。在检查模拟结果后,得出结论:基于直流高压的电动车辆充电站减少了电池充电时间。仿真结果经数学建模和理论分析进行了验证。在正常的环境条件下,太阳能系统已经产生满负荷的电能,足以用于电动车充电站。未来工作的方向是将通信系统整合到电动车辆充电站,以检查来自太阳能/存储系统的能量流。此通信应与在多个点上实施的智能传感器相连,如DC/DC太阳能转换器,DC/DC存储转换器和电网。这将改善在太阳能/存储器或转换器干扰期间对电动车充电终端的保护。
1.2 电动汽车太阳能无线充电站[2]
电动车的长途旅行在很大程度上受到限制。本文提出了利用无线电力传输的电动汽车太阳能充电站的设计,从而克服了传统日常技术存在的问题。采用无线电力的传输方法,将太阳能从光伏(PV)电池板转移到电动车辆中。太阳能电池板被认为是建立一个独立的发电站,从而最大限度地减少对传统能源的依赖。太阳能电池板通过太阳发出的光能来产生电能。从光伏板获得的能量通过太阳能充电控制器馈送到电动汽车的电池中,太阳能充电控制器使PV电池的功率输出最大化。发射器电路将从电源电池获得的DC电源转换成高频AC输出,然后借助于发射线圈以电磁(EM)波的形式将其发送到负载。具有置于电动车内的接收线圈的接收器电路对接收到的电波进行解码并产生相应的直流输出,对电动车辆的电池进行充电。整个装置结构紧凑,从而减少了占地空间,因此易于安装和维护。
与有线传输相比,无线功率传输的使用证明是有用的和有效的,此外,如该模型所示,在不久的将来可以大规模安装无线电站。太阳能的使用减少了电站对政府或私人参与者对电力输入的依赖。这增加了其多功能性,并使其适用于接收充足的太阳辐射。
无线传输:涉及的无线传输模式是考虑功率和距离参数的电感耦合。振荡器输出用于激励作为发射器的铜线圈。线圈产生的磁通量与设置在车辆中的接收器线圈相连。连接的线圈然后在其末端产生交流输出,从而指示成功的功率传输。该交流电源不能存储在电池中,并且使用该整流器,其输出被提供给电动车辆中的电池。
1.3 基于太阳能和风能的电动车充电站[3]
本文介绍了基于太阳能和风能的充电机制(SW⁃CM),以生成用于对电动车辆(EV)的电池组充电的电力。可再生充电站由太阳能光伏(PV)模块和风力发电机组成。SWCM极大地降低了化石燃料发电的需求,从而大大降低了二氧化碳和一氧化碳排放。风能和太阳能等可再生能源利用单和二极管模型进行建模,并对风能发电进行了分析建模(图2)。针对所提出的SWCM,已在MATLAB-Simulink中开发了仿真模型。已经在不同的辐照度水平下研究了太阳能电池板的特性,并且已经在两种不同的负载(1kW和3kW)条件下研究了风力涡轮机的不同参数。有两个单向直流(DC)-直流转换器连接到PV模块,风力涡轮机和六个双向DC-DC转换器连接到十个充电点,为电动车辆提供充电。为了平衡负载需求,所提出的系统通过三相双向DC-AC(交流)逆变器连接到电网。
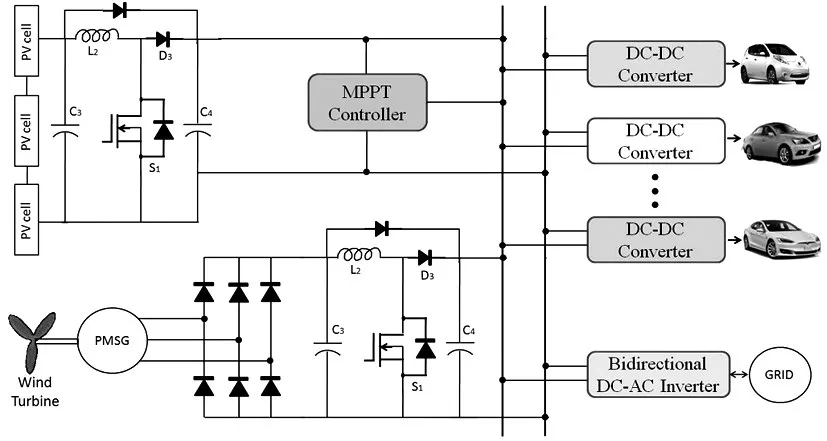
图2 电动汽车充电站
可再生充电站采用10m×20m的太阳能光伏组件SPM050-P和额定风速12米/小时的垂直轴风力发电机组(WKV-10000)。对过去五年(2012-2017)的天气报告进行了分析,提取的统计数据显示,有276个晴天。太阳能光伏在这些日子里可以产生全部功率,而在其余日子里,太阳能光伏可以产生全部功率,可以通过太阳能和风能来管理功率需求,并且可以从电网获取充电EV所需的平衡能量。必须估算充电站从太阳能光伏组件和风力发电机产生的总功率。
所得结果表明,所提出的可再生充电机制适用于电动车充电,从而创造无污染的环境。
1.4 基于飞轮的快速充电站[4]
本文介绍了新型基于飞轮的快速充电站(FFCS,图3),用于公共电动客车的高性能充电基础设施,设计标准将为快速充电站。利用飞轮储能系统为充电站提供先进的能量储存,实现清洁的公共交通,包括使电动巴士减少温室气体和二氧化碳排放。

图3 FFCS设计
建模和管理系统在车站中的集成,由基于决策的控制平台执行,该平台协调快速充电器,飞轮存储框架,光伏电池和公用事业网络之间的电力流动。飞轮架构的电力流动与公用事业网络的电力流动之间存在一种整齐的交流电。飞轮动能储存系统在响应时间和能量密度方面提供了非常强大的功能。而且,对于一些不同种类的车辆,这种技术可以为电力需求提供全部能量。汽车中的这种技术可以满足集成挑战,如质量、效率和成本,可以给出飞轮储能系统的技术经济优化。该系统的简单介绍由飞轮、永磁同步电机和电源转换器组成。对于系统的每个部分,都可以提出物理和经济模型。最后,经济优化可以在短程时间内完成。飞轮储能系统已成为世界上重要的储能系统之一。飞轮储能系统最近在电力系统和微型电网中应用很多,因为它们灵活,智能且活跃。除此之外,它们更适合于可再生资源,并被认为对环境友好。由于业务储备基金以及该创新提供的扩大盈利能力,现代能源储存的快速充电已成为标准充电创新。客户已经了解通过许多应用程序快速充电的优点。提出了一种基于飞轮式快速充电站(FFCS)的模块化电动汽车控制系统。FFCS的主要目标是折中EV电池的预定义充电曲线,并结合支持电源框架的迟滞动态功率转换器。从这个意义上讲,当动态功率不与网络分开时,FFCS将提供维持EV电池持续充电过程所需的功率。整个控制框架的关键商标是可以在公用事业网络和FFCS之间没有任何离散的情况下工作。
2 充电站的能量管理
2.1 电动汽车充电站的充电调度与性能分析[5]
本文提出了一个电动汽车(EV)电池充电系统的随机模型和充电调度方法。利用隐马尔可夫链的泊松过程来模拟EV电流随时间变化的行为,预测系统中的复杂性。在所提出的随机模型中考虑了相关的随机因素和约束,其中包括停车时间、需求的电量、停车场(充电设施)的数量和最大需求水平。通过获得有关驶入充电站的电动车辆数量、等待时间的分布以及在随机停车时间和电费联合分布的状态,来分析所提出的收费调度的性能测量。
在获得稳态分布和一些条件分布后,得出了两种充电调度方法的性能指标:系统内完全充电的概率、给定停车时间和所需充电能量的合理期望。此外,在所提出的随机模型下采用了马尔可夫调制的灵活泊松过程将EV到达的时变行为并入停车场。这种研究的结果可能是有意义的,因为许多电动汽车司机在某段时间内会频繁出现公寓楼、百货商店或办公楼,并立即插上电动汽车以便在访问期间收取费用。根据真实的充电站环境,可以估计或修改随机因素的参数和所提出的模型的约束。也可以考虑基于两种典型的充电调度方法的修改,并且可以相应地执行性能分析。未来的研究也可以解决许多其他问题。例如,战略性运营决策,例如当快速和慢速充电设备可用于安装或储能系统的影响时使用的最佳快速充电器数量。设计包括充电系统成本和EV驾驶员满意度的调度方法也是有价值的。由于充电站消耗的电力的单位成本随充电时电价的变化而波动,特别是在高峰需求时,与智能电网系统相连的电动汽车充电站的成本效益分析也可能引起人们的兴趣。这种称之为“需求响应”的情况很可能在不久的将来在许多国家实现。
2.2 电动和插电式混合动力车辆的3D视觉机器人充电站[6]
电动汽车的两个主要问题是是行驶距离短和充电过程不方便。在本文中,介绍一个带3D视觉引导的机器人充电站来解决以上问题,以便插拔充电器。首先,介绍由3D视觉系统,UR10机器人和充电站组成的整个系统。然后展示用于成功识别和获取充电端口的,基于形状的匹配方法。最后,介绍了机器人运动规划程序,并演示了其功能。主要分为以下几步:
(1)充电端口的检测
使用立体相机作为视觉传感器,基于模板的形状进行匹配方法,查找立体图像中充电端口的位置。建了两种类型的充电端口模板以及电源插头连接器,稍后将进行手动校准。使用Halcon机器视觉软件进行模板匹配,对充电端口进行识别。
(2)对机器人进行校准
对机器人进行手动校准,主要是从视觉传感器到机器人底座之间的坐标系转换。使用这种变换,可以将视觉传感器检测到的任何物体的位置重新计算到机器人的坐标系中,从而允许机器人移动到或避开该特定位置。
(3)机器人运动规划
考虑到有限的工作空间和所有的运动由相机测量定义,使用了笛卡尔坐标系下的机器人控制。包含多个运动规划算法的框架工作。基于快速搜索随机树的算法(RRT)来进行运动规划。使用速度控制器来保证机器人的运动轨迹平滑,且更接近人类。
(4)插入程序
在计算充电端口的姿态之后,将插头中心设置为坐标系的原点。插入程序的目标是将连接器插头与充电端口完美对齐。所以,首先,机器人高速移动插头到距离充电端口0.1米范围内的位置。将速度降低到最大机器人关节速度的10%并移动到最终的对齐位置。在这种姿势下,连接器插头和充电端口完全与其Z轴对齐,距接触点仅几毫米。最后一步是沿着Z轴以最大速度的2%移动并执行插入运动。
(5)拔下插头
在车辆充满电量或达到所需电池电量后,机器人必须断开充电器。在充电过程中没有位置变化的情况下,拔出过程被简化为按照相反顺序的插入过程的路线。
2.3 电动汽车充电站的数据:分析和开发[7]
本文中,分析了瑞典乌普萨拉的五个充电站(CS)的数据。然后使用先前分析的数据开发并验证空间模型。结果表明,车站的出租率存在很大差异。有些电站比其他电站更频繁使用。此外,在平均充电时段收取的能源相当于驾驶27.7公里,这比乌普萨拉的日常驾驶距离多6%。还有人表示,某些CS中的负载曲线是两个或更多不同负载曲线之间的混合曲线,例如住宅和工作场所的曲线。当考虑每个CS来表示不同的充电曲线的混合时,所产生的模型可以反映充电站的负载。
该模型可以分为三大块。第一个估计执行行程的概率,第二个将车辆分布在空间网络上。最后,第三个估算充电负荷。
使用了具有三种停车状态的非齐次马尔可夫过程。需要车辆在没有驾驶时间的情况下,立即在停车状态之间交替。在每次充电过程结束时,大约44分钟的额外插入时间,对模型的结果具有小的影响。
该模型假设所有车辆最初停放在家中。然后,对于每辆车,马尔可夫链被用来确定车辆在每个时间点的位置状态S。如果状态S在时间t发生变化,车辆被随机分配到具有相同位置状态S的城市中的停车场t。直到车辆在未来的时间点改变其状态S,车辆的这个位置才改变。在状态S变化时,这反过来改变了城市中的位置,行驶距离是从行程调查获得的类似状态之间的行驶距离随机抽样。
通过假定交流/直流电流,驾驶距离导致根据交流电消耗率η在夏季和0.15千瓦时/千米之间的夏季和0.25千瓦时/转换效率为0.9。冬季月份被定义为从十二月到三月的月份。在这个模型中,没有关于电动汽车电池容量的假设,相反所有的电动汽车都被假定有足够的电池来满足他们的需求,可能在近期的情况下,只有能源消耗。
2.4 基于脉冲电流充电的新型电动汽车充电站[8]
电动汽车的实施仍面临许多严峻的挑战。技术层面的挑战是如何为公共场所的电动车辆提供出色的快速充电服务。为了获得优异的快速充电服务,已经选择了与恒定电流充电方法相比具有很大优势的脉冲充电方法。本研究的目的是基于脉冲电流充电方法设计具有两个快速充电端口的充电站。实际和模拟结果证实充电站工作正常。
充电站(CS)的一般配置可以由不同的电力存储和发电单元组成,具有DC-DC和DC-AC转换器。该架构可以连接到微电网(MG)。实际上,充电端口可以由存储单元,发电单元或MG提供。端口总是消耗电力,而风力发电机总是发电。如果消耗量大于内部发电量,则MG必须向直流链路供电。文中图2示出了从采用的标准IEEEMG的部分,包括CS,本文研究的CS可以连接到这种MG。CS的功率电子拓扑结构,有两个主要部分,直流链路左侧的元件称为DC-AC级,而直流链路右侧的元件称为DC-DC级。DC-DC包括一些快速充电服务的端口。每个端口由一个或多个IGBT支路组成。每个端口可以考虑一个,两个或三个IGBT支路,使设计人员能够在电感器之间共享所需的电流。这反过来又减少了数量和成本。由于仿真是在不到两秒的时间内完成的,因此已经使用Liion电池组的静电瞬态模型。已经假定施加到三相二极管桥式整流器的端子的三相电压是平衡的并且具有完全正弦形式。降压斩波器是一个降压和升压DC-DC转换器,稳态运行有两种模式。
本研究的目的是基于脉冲电流技术设计具有两个快速充电端口的CS。提出了一种特殊的电力电子拓扑结构及其控制系统,然后对本文设计的CS的小型样机进行了实验测试。实际结果与仿真结果一致,并证实CS工作正常。
2.5 插入式混合动力汽车充电站的能量管理与控制[9]
充电基础设施对电动汽车行业健康快速发展起着关键作用。本文介绍了一个电动汽车充电站的能源管理和控制系统。充电站(CS)集成到具有风力涡轮机最大功率点跟踪(MPPT)控制子系统,光伏(PV)MPPT控制子系统和具有电解子系统的受控固体氧化物燃料电池的并网混合动力系统作为可再生能源。在本文中,能源管理系统设计同时用于充电和放电五种不同的插电式混合动力电动汽车(PHEV),以实现电网对车辆(G2V)、车对电网(V2G)、电池存储系统到电网(BSS2G)、电池存储系统到车辆(BSS2V)、车辆到电池存储系统(V2BSS)和车辆到车辆(V2V)充电站的充电和放电要求。在Matlab/Simulink中开发了一个仿真实验台,用于自适应地评估和控制不可再生能源的AC-DC-AC转换器,存储系统的DC-DC转换器,DC-AC电网侧逆变器以及CS采用自适应比例积分微分(AdapPID)控制策略。通过与传统的PID控制方案进行比较,通过仿真结果验证了AdapPID控制策略的有效性。
所有这五款PHEV和BSS都有一个降压-升压转换器和一个电压调节器。降压-升压转换器由两个AdapPID控制器控制。一个AdapPID用于降压模式,另一个用于升压模式。
电压调节器也由AdapPID控制。CS通过DC-AC转换器连接到HPS的交流总线,DC-AC转换器也由AdapPID控制,给出了由可再生、不可再生能源(微型汽轮机(MT))、存储系统(电池和超级电容器(SC))、公用电网和CS组成的所述HPS的细节。在HPS中,有两种类型的负载连接到交流总线。一个是住宅负荷(PL),另一个是CS负荷(PCS)。
2.6 实施电动汽车充电站的经济性分期计划[10]
本文提出了一种经济的分段计划方法,该方法能够将插电式电动汽车(PEV)充电需求与在配电系统中安装快速充电站(FCS)进行最佳匹配。
拟议的计划包括两个阶段,第一阶段评估配电系统提供PEV充电需求与基础设施的能力。为了研究使用不同类型的收费(即第2级,第3级)的影响,考虑PEV负荷建模时的旅行模式,PEV需求在不同类型的住宅和公共充电设施之间分配,PEV充电模型见图4。本文利用最优潮流(OPF)分析来获得现有配电系统。在第二阶段,使用经济分期计划模型,将PEV的需求与安装的FCS容量进行最佳匹配。通过包括收费服务的等待时间和服务时间,所提出的规划模型不仅考虑了FCS计划的经济评估,还考虑了FCS服务的质量,对耦合运输和电网的综合案例进行了研究。

图4 PEV充电模型
结果表明,在初期阶段,不需要进行大型配电系统升级,以满足公众PEV需求,达到30%的普及率水平。说明了使用FCS分配和管理PEV需求的影响,目前的工作为FCS投资者提供了评估此类业务盈利能力的手段。
3 电动汽车充电站的位置确定
3.1 在电动车辆路径上设置充电站[11]
将充电站有效地整合到电动车辆的旅行路径中并且对充电站的详细的位置进行规划是最重要的。
在这种情况下,考虑以下基本问题:考虑一个电动车辆,在执行点对点运输请求时沿着直线路径移动。每个运输请求由线路上给定的起始位置和目标位置定义,并将车辆装载到许用容量。车辆的电池的最大容量为C,这限制了行驶距离,电池的电量排空就需要充电。为此,将一组充电站放置在电动车的行驶路径中,其中一个充电站必须在电池耗尽之前及时给车辆充电。此设置需要解决两个主要决策问题:在运营级别,短期车辆调度问题将得到解决。在这种情况下,我们的目标是在所有给定的运输请求中插入充电事件,从而使交货时间最小化,并且不会发生电力故障。在战略层面上,沿线充电站的位置需要确定。基本的权衡是要么有更多的车站,这减少了车辆的弯路,或者通过为更多车辆出行的价格设立更少的车站来节省投资成本。只有通过解决日常车辆调度问题来量化充电站某个位置计划是否比另一个位置计划更好,这样两个问题之间就存在很大的相互依赖关系。
在我们的计算研究中,解决了一些管理方面的问题,以下建议可以提供给码头管理人员:额外充电站的影响迅速减少。尽管在引入两个站而不是单个站时减少生产量已经不是很大,但更多站的进一步减少的生产量是轻微的。然而,更大的电池容量可以显著提高性能。更大的容量允许在两次再充电事件之间处理更多的工作,这样,绕过充电站可能不是必需的,并且加速执行给定的出发传输请求。
3.2 电动汽车充电站的有效配置:在密集城市网络中的应用[12]
电动汽车(EV)的部署需要充电站的优化和成本效益的实施,定义了在真实网络中分配充电站的方法。本研究使用来自家庭旅行调查的行程OD矩阵信息以及动态车辆模型,基于实际行程(城市驾驶循环)评估EV消耗。
这些行程是根据路由工具计算出来的,并提供了路程信息。这使得里昂大都会区能源需求的准确表征成为可能。所有参数都用作整数线性优化程序的输入,用于充电站的位置确定。该方法基于具有p-扩散约束的经典固定电荷位置模型的适应性。结果表明,这种方法可以帮助未来在城市范围内实施充电站。

图5 充电站位置确定方法
提出了具有扩散约束的固定充电位置模型方法。因此,经典方案中使用的旅行成本被修改以处理电动汽车的特性。许多因素影响在EV的范围和消费,如电池类型(铅酸,锂离子)、行驶距离、道路拓扑(海拔)和驾驶行为(期望速度,加速度,交通状况,电池温度...)许多研究集中在预期的行程范围,以估计充电站位置模型所需的消耗。但是,其他因素也需要考虑。在我们的模型中,我们定义了处理这些因素的方法。首先,我们使用OD矩阵来确定移动需求并导出能源需求。该OD矩阵来源于法国里昂大都会地区的最大住户旅行调查[31]。我们根据目的地的OD需求行程构建需求区域(或集群)。接下来,通过IGNAlti-Maps数据库提供的海拔信息丰富了这些行程。最后,应用VEHLIB库中的动态消费模型来提供真实的消费评估。
3.3 电动汽车充电站位置的优化[13]
开发了一个模型来优化电动车(EV)公共快速充电站的位置。计划充电站位置的困难在于EV充电需求出现的不确定性。出于这个原因,我们使用随机流量捕获位置模型(SFCLM)。将这个问题作为一个两阶段随机整数程序来制定,其中站点位置在第一阶段是固定的,并且在第二阶段确定不同旅程链之间的电动车流量。

图6 充电站位置优化模拟流程
对中央-俄亥俄州进行了研究,大部分建成的车站都集中在该地区的城市核心地带。300万辆车,20000个路段,10391338个潜在的第二阶段情景,以及222个候选充电站位置。
随着车站数量的增加,一些车站出现在该地区的郊区,以提供扩展的收费网络。车站位置对于最终建成的车站数量是稳定的。证明了充电站网络的好处在于有多少电动汽车能够通过充电,完成他们的日常行程。六个公共充电站允许至少60%的电动汽车完成日常行驶。我们最后将SFCLM与一个确定性模型进行比较,在这个模型中,EV流量被设置为等于它们的期望值。如果要建设的车站数量有限,SFCLM有望最大限度地提高可以捕获的电动汽车的预期数量。随着待建站数量的增加,可以使用确定性模型,因为由两种模型确定的台站网络变得非常相似。
参考文献
[1]Asif Khan.Design,Integration and management of solar energy for electric vehicle charging station[C].Conference:Conference:Solar World Congress 2017.
[2]Revanth Kumarr.Design and Development of Solar Powered Wireless Charging Station for Electric Vehicle[OL].https://www.researchgate.net/publication/319037346.
[3]C.Chellaswamy.Solar and Wind Energy Based Charging Station for Electric Vehicles[OL].https://www.researchgate.net/publication/323187741.
[4]HA Gabbar.Flywheel-Based Fast Charging Station–FFCS for Electric Vehicles and Public Transportation[J].International Journal of Hydrogen Energy,2017,42(1).
[5]Jerim Kim.Scheduling and performance analysis under a stochastic model for electric vehicle charging stations[J].Omega,2017,66:278-289.
[6]Justinas Miˇseikis.3D Vision Guided Robotic Charging Station for Electric and Plug-in Hybrid Vehicles[C].OAGM and ARW Joint Workshop 2017 on Vision,Automation and Robotics.
[7]Mahmoud Shepero.Data from electric vehicle charging stations:Analysis and model development[C].E-mobility Power System Integration Symposium,2017.
[8]Mahdi Bayati.A New Electric Vehicle Charging Station Based on Pulse Current Charging Method[C].Electrical Engineering,2017:967-972.
[9]Sidra Mumtaz.Energy Management and Control of Plug-In Hybrid Electric Vehicle Charging Stations in a Grid-Connected Hybrid Power System[J].Energies,2017,10(12):1923.
[10]MMA Salama.Economical staging plan for implementing electric vehicle charging stations[J].Sustainable Energy Grids&Networks,2017(10):12-25.
[11]Nils Boysen.Scheduling electric vehicles and locating charging stations on a path[J].Journal of Scheduling,2017:1-16.
[12]Fouad Baouche.Efficient Allocation of Electric Vehicles Charging Stations:Optimization Model and Application to a Dense Urban Network [J]. IEEE Intelligent Transportation Systems Magazine ,2014,6(3):33-43.
[13]Ramteen Sioshansi.A stochastic flow-capturing model to optimize the location of fast-charging stations with uncertain electric vehicle flows [J].Transportation Research Part D 53(2017)354–376.
猜你喜欢
汽车实用技术(2022年19期)2022-10-19
电气技术(2022年6期)2022-06-27
无线互联科技(2022年8期)2022-06-23
西安航空学院学报(2021年1期)2021-07-24
科学家(2021年24期)2021-04-25
汽车维修与保养(2021年8期)2021-02-16
环球时报(2020-12-08)2020-12-08
海外星云(2016年17期)2016-12-01