
基于聚类算法在车辆检测中特征选择的应用技术研究
2018-05-18 09:23王秀林
机械管理开发 2018年4期
王秀林
(山西交通职业技术学院, 山西 太原 030031)
引言
随着人们生活水平的提高,车辆的数量越来越多,车辆的种类、型号、框架结构等都具有不同的特征,因此应用虚拟现实技术和图像处理技术的目标检测和识别技术,例如人脸识别、行人特征检测、车辆检测等,在智能交通和传感技术发展的过程中,也越来越多地被应用到交通领域,例如车辆碰撞预测预警、车辆偏离车道等突发情况;在智能交通中通过视频捕捉利用视觉技术进行分析和跟踪,检测人流拥挤和车辆通行状况,可便捷高效地进行交通管理,减少交通事故。
在车辆检测技术中,通过背景图像、纹理和颜色等对运动目标进行检测,提高检测精度,在检测过程中,通过利用高速混合建模、分类器、决策树等算法进行多目标检测、跟踪、识别等。在车辆检测中通过视频和图像分离背景图像,常用的技术有基于背景差分、先验知识、光流法、机器学习等,其中,机器学习的研究应用已成为目前的前沿领域,目标检测的方法和技术越来越多。
1 聚类算法概述
聚类算法主要是对生成的簇中的数据进行相异和相似性判别,尽最大程度地实现对象中的相似度度量。
聚类算法主要包括基于划分、层次、密度、网格、模型、分形、仿生等算法,无论用什么样的聚类算法,影响算法结果的好坏主要受类目、距离函数和算法优良三种因素的影响,其中基于划分的聚类K-Means算法,容易受离散值或异常点、初始点选择的影响,且数据集越大越容易产生局部最优化;基于层次聚类相对复杂度较高、容易产生链状且容易受异常点的影响,但该算法不需要预先对聚类的类数进行定义,距离或相似度函数限制少;基于密度聚类的算法,例如DBSCAN算法,对于高维数据和点之间的稀疏难于进行密度定义,但该算法可以事先不需要知道形成的簇类的数量和簇的形状。
谱聚类算法简单易行,其聚类性能优于传统的K-Means算法,将数据的划分转化为图的分割,该算法是基于图论的聚类方法,通过对图内的相似度计算,将图划分为多个子图,子图内相互之间相似度高,子图间相互之间相似度低。
2 谱聚类算法
谱聚类算法是将所有的样本点连接成图,然后将图分割成不同的子图,使得不同的子图相互间连接的权值达到最小。
首先定义两个不同子图间的连接权值为ω(A,B)=∑i∈A,j∈Bωij,其中 A-与 A 互补,记 vi∈A 且 i∈A,若将图分割为 K 个子图 A1、A2,…,AK,则通过对最优问题进行分割得到

为了解决图分割不均衡问题,生成有效分割,主要通过RaioCut和Normalized Cut两种方法进行合理分割,计算方式如下:
RaioCut和Normalized Cut将子图大小作为目标函数的分母,这样可均衡所有子图大小。其中,Normalized Cut的目标函数对cut进行了最小化,并进行了划分平衡,其中衡量子图大小的标准是通过子图中各端点的Degree之和进行,本文采用了Normalized Cut的目标函数:
式中:d1为第3节中图1-1的权值和,d2为第3节中图1-2的权值和
s.t.:qTDq=1,qTDq=0,泛化瑞利熵为而L'q'=λq'。其中
因而只需要将原L矩阵,归一化即可
归一化的L矩阵有:

又:

L'的最小特征值与的最大特征值对应。
该算法聚类的具体步骤如下:
1)根据视频采集的图像数据,进行数据预处理,生成图的邻接矩阵;
2)根据归一化理论,进行拉普拉斯矩阵计算;
3)通过矩阵计算,生成最小的K个特征值和对应的特征向量;
4)根据特征向量进行K-Means聚类计算。
K-Means聚类算法属无监督的学习方法,K-Means算法主要是通过随机初始化,生成种子类目K,利用最近邻算法计算样本点分别与各种子间的距离,生成不同的类簇,总类簇数为类目数,再计算各类簇的质心,计算新的类目种子,通过迭代计算,直至种子点的距离小于指定的阈值。具体流程如下:
1)随机生成 K 个类簇种子,即为(ω1,ω2,…,ωK);
2)对所有样本点Xi+进行计算,计算每个点所属类目:

然后对每个类生成的类j进行质心计算
根据式(6)进行优化函数计算,通过Xi+得到聚类类目:

即:

3 试验验证
根据UCI数据集选择了不同的3种,然后利用谱聚类、K-Means聚类进行对比试验,经验证,数据集1的聚类结果分别78.26%、77.34%,数据集2的聚类结果为61.73%、49.86%,数据集3的聚类结果为55.21%、44.65%。由此可见,谱聚类算法相对较为准确。根据采集的图像数据,对车辆图片进行标示,然后由图的像素大小和比例进行图像划分,再根据划分后的图像利用HOG特征经过谱聚类算法再次进行划分,通过进修迭代计算,最终得到如图1所示的样本聚类结果,聚类类目分别为6类和12类。
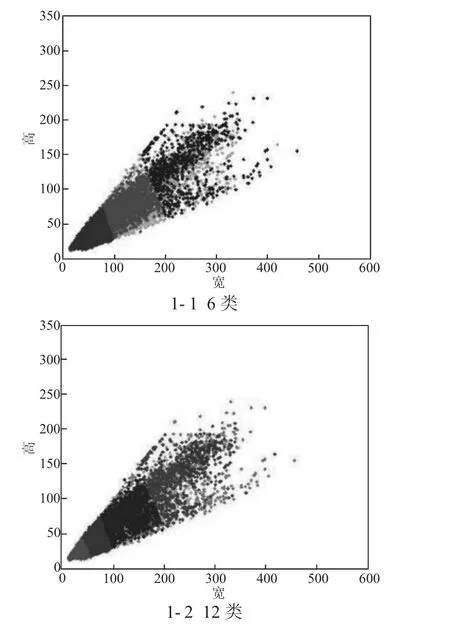
图1 样本聚类结果
由此可见,通过谱聚类进行车辆检测具有较好的可行性,且能得到较好的应用效果。
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
黑龙江科学(2021年14期)2021-08-06
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
中学生数理化·七年级数学人教版(2020年9期)2020-11-16
同济大学学报(自然科学版)(2019年2期)2019-04-02
计算机与数字工程(2019年3期)2019-03-26
江苏通信(2018年4期)2018-12-04
自动化学报(2017年7期)2017-04-18
图书馆学刊(2015年11期)2015-02-12
图书馆论坛(2015年2期)2015-01-03
