利用CATIA进行十字万向节力矩传递分析
2018-05-18 07:40:29殷腾蛟甘林
汽车实用技术 2018年7期
殷腾蛟,甘林
(安徽江淮汽车集团股份有限公司,安徽 合肥 230022)
前言
利用CATIA软件的运动分析功能,可以模拟出任意时刻输入轴、输出轴、十字轴的位置关系,利用位置关系数据,可以直接计算出输入轴与输出轴之间的力矩关系。
1 十字万向节力矩传递分析
1.1 任意时刻下力矩分析
1.1.1 十字万向节传动机构
任意时刻时,十字万向节传动机构如下图1所示:
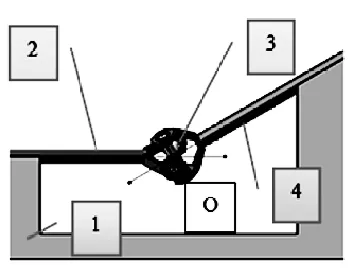
图1 十字万向节传动机构
其中:1、基座;2、输入轴;3、十字轴;4、输出轴。输入轴与输出轴交点为O。
1.1.2 输入轴对十字轴作用力分析
输入轴对十字轴受力分析如下图2所示:
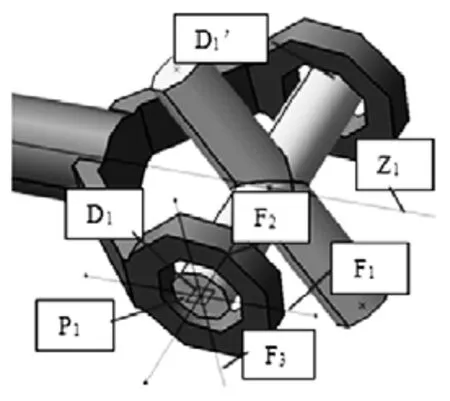
图2 输入轴对十字轴受力分析
D1、D1’为力的作用点。轴线 Z1与输入轴轴线重合,通过 D1与 Z1做平面 P1,过 D1做 3条正交直线 F1、F2、F3表示3个方向的力,F1与轴线平行,F3为P1的法线。D1上的力未知,可以用 F1、F2、F3三个方向的力表示。D1’按照 D1的方式处理。D1、D1’的合力对十字轴产生的力矩如下图 3所示:
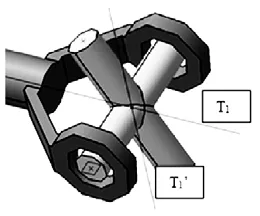
图3 D1、D1’的合力对十字轴产生的力矩
T1与轴线Z1平行,T1’为P1的法线方向,T1、T1’垂直。根据作用力与反作用力的关系,十字轴对输入轴轴线方向的力矩大小同 T1,因输入轴力矩平衡,所以 T1大小等于输入力矩大小。

1.1.3 输出轴对十字轴作用力分析
输出轴对十字轴受力分析如下图4所示:
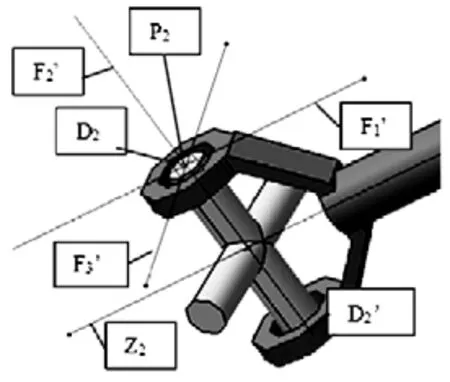
图4 输出轴对十字轴受力分析
分析方法同输入轴对十字轴的受力分析,其中Z2为输出轴轴线,D2、D2’为输出轴对十字轴力的作用点,平面 P2通过D2、D2’与Z2。D2、D2’的合力对十字轴产生的力矩如下图5所示:
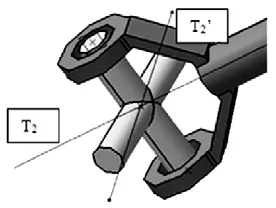
图5 D2、D2’的合力对十字轴产生的力矩
T2与轴线 Z2平行,T2’为 P2的法线方向,T2、T2’垂直。根据作用力与反作用力的关系,十字轴对输出轴轴线方向的力矩大小同 T2,因输出轴力矩平衡,所以 T2大小等于输出力矩大小。

1.1.4 计算T1与T2的关系
根据以上分析,十字轴受力矩图如下图6所示:
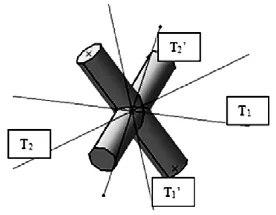
图6 十字轴受力矩图
通过十字轴轴线X1与X2做平面P3,过O点做P3的法线Z3,如下图7所示:

图7 做十字轴平面与法线
通过前面做图方式可知,X1同时与 Z3、T1、T1’垂直,X2同时与 Z3、T2、T2’垂直,即 Z3、T1、T1’共面,Z3、T2、T2’共面。
将T1、T1’向Z3方向求合力矩为T3,如下图8所示,将T2、T2’向Z3方向求合力矩为T3’,如下图9所示:
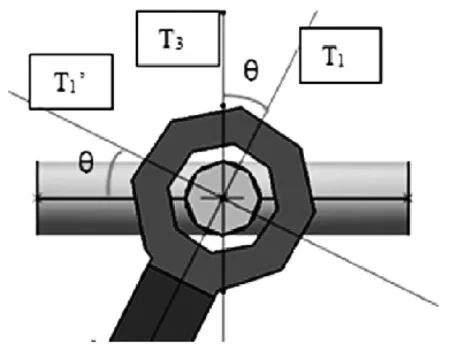
图8 T1、T1’向Z3方向求合力矩为T3
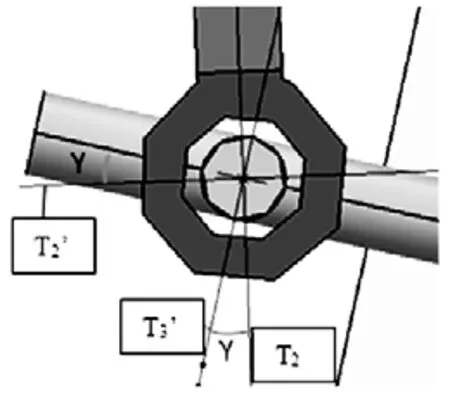
图 9 T2、T2’向 Z3方向求合力矩为 T3’
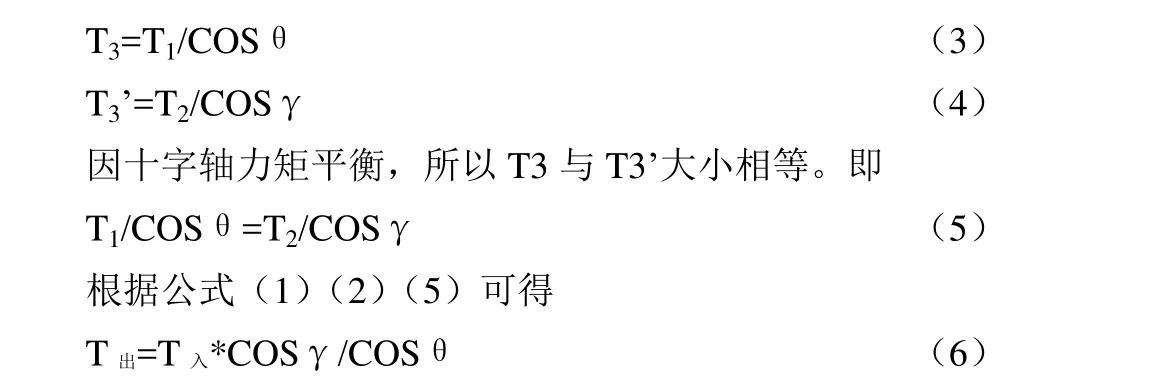
角度θ、γ可通过CATIA软件运动分析功能计算出来。角度θ即为输入轴节叉相对于十字轴转过的角度,角度γ即为输出轴节叉相对于十字轴转过的角度。
1.2 十字万向节运动过程中的力矩传递分析
因输入轴旋转一周后回到初始状态,所以只需求出输入轴旋转一周过程中的角度θ、γ。具体步骤如下:
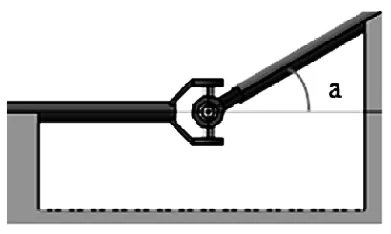
图10 初始状态
(1)设置初始状态如下图10所示,输入轴与输出轴夹角a=30°,输入轴与十字轴平面P3垂直。
(2)设置输入按6°/s的角速度匀速转动;
(3)打开模拟器,打开传感器,将输入轴与万向节夹角、输出轴与万向节夹角两项设定为能观察到,如下图11所示:
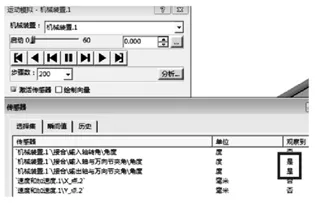
图11 模拟器选项
(4)运行
(5)运行完成后,点击传感器的图形选项,可以看到角度△θ、△γ的曲线如下图12所示。将结果输出到表格文件中。
θ=△θ+θ0,γ=△γ+γ0,θ0=0°,γ0=30°。
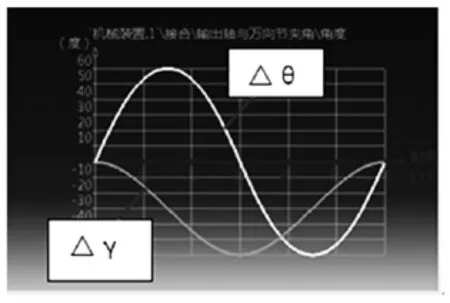
图12 运行结果
(6)设定输入力矩T入=1,将输出结果带入公式6,计算输出力矩T出,同时按照《汽车底盘设计》公式。
T出=T入*(1-SIN2a*COS2φ)/COSa计算出输出力矩 T出’,然后对比T出与T出’,对比结果如下图13所示,两个结果相同,曲线重合。
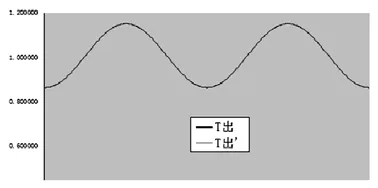
图13 对比T出与T出’
2 结论
通过对比,T出与T出’相同,说明以上分析方法准确可靠。可以将该分析方法运用到其它结构的受力分析中。
参考文献
[1] 王霄峰.汽车底盘设计.[M]北京.清华大学出版社,2010.
[2] 朱炳麒.理论力学.[M]北京.机械工业出版社,2001.
[3] 秦琳晶.CATIA V5R21完全实战技术手册.北京.清华大学出版社,2016.
猜你喜欢
装备制造技术(2022年5期)2022-09-06 03:42:46
文史春秋(2022年4期)2022-06-16 07:12:52
数学大王·趣味逻辑(2021年3期)2021-03-10 11:21:26
汽车观察(2018年12期)2018-12-26 01:05:24
精密制造与自动化(2018年1期)2018-04-12 07:42:48
数学大世界(2018年1期)2018-04-12 05:39:05
数学教学通讯·高中版(2018年11期)2018-01-15 10:23:12
湖南城市学院学报(自然科学版)(2016年2期)2016-12-01 04:06:45
汽车实用技术(2015年8期)2015-12-26 09:01:02
楚雄师范学院学报(2015年9期)2015-06-19 06:06:18