回转体舱段中零件位置等距喷涂标识定位方法
2018-05-17 01:39:31郭鸿俊王爱春韩志昌
航天制造技术 2018年2期
王 新 郭鸿俊 王爱春 韩志昌 王 娟
回转体舱段中零件位置等距喷涂标识定位方法
王 新1郭鸿俊1王爱春1韩志昌2王 娟2
(1. 航天材料及工艺研究所,北京 100076; 2. 火箭军驻某军事代表室,北京 100076)

针对回转体舱段中零件安装定位位置装配精度一致性不好,存在质量隐患等问题,将自动喷涂标识技术和数控技术集成,通过等距喷涂标识精度影响因素分析、回转体结构的等距喷涂几何模型构建,提出了等距喷涂标识方法,构建了零件定位位置自动喷涂标识平台。通过试验验证表明,自动化等距喷涂标识技术能够取代传统的人工画线进行零件定位的方式,满足零件装配精度要求,提高零件装配质量的一致性。
自动喷涂;等距喷涂标识;零件定位;装配精度
1 引言
一种航天回转体结构舱段中安装有大量支架类零件,目前主要采用人工画线或专用定位装置的方式进行零件定位,使其符合设计准确度和互换协调要求[1]。传统的手工画线方法基本依赖工人的技术水平,精度难以保证、重复性差、工艺稳定性较差,导致产品装配质量一致性不好。
近些年来,随着数字化、自动化技术的不断深入研究和应用,柔性装配技术、光学视觉识别技术、数字化调姿技术、激光轮廓投影技术等逐渐代替了上述传统的方法[2~9]。但上述技术应用的范围基本集中在开敞性好的、系列化的零件定位和装配中,回转体舱段由于其自身结构的特殊性,如空间不开敞、零件种类多等特点,不利于上述技术的实现。
为解决零件手工画线定位所产生的问题,将自动喷涂标识技术和数控技术相集成,通过质量关联参数的信息反馈,辅助零件位置轮廓线、中心位置线的自动标识,将原有的手工画线定位的方式改进为自动喷涂标记的定位方式,能够在实际中得到有效应用。
2 零件自动标识定位方案及平台搭建
回转体舱段一般为大直径薄壁圆柱型、圆锥型或其近似体结构。为满足零件位置其在舱壁上的标识,以龙门式多轴加工中心平台,搭建起以加工中心主轴头和喷码机为主的喷涂系统架构。
喷涂装置出口距离被喷涂表面差异较大时,会产生标记墨线粗细不均的情况,或者出口方向和被喷涂表面法向不尽一致时,产生的线条粗细、位置也有差别,给零件的标识精度带来问题。因此采用自动化的喷涂方法时需要以等距喷涂方式进行,即保证喷涂出口与目标点的空间距离保持不变。
3 回转体舱段的等距自动喷涂标识精度分析
3.1 影响喷涂精度的因素分析
喷涂精度的评价指标包括喷涂线条的宽度、喷涂位置的精度等。
喷涂线条的宽度和喷涂的速度、距离以及喷涂点的方向相关。喷涂速度越低、喷涂距离越远,线条的宽度就约大,反之愈小。就零件定位精度而言,越细的喷墨线条宽度对零件定位的准确度越高。影响线条宽度指标的另外重要因素是喷出的法向方向的偏差量,偏差量越大,喷出的线条宽度越大。
喷涂线条的位置精度和喷涂点的方向、距被喷射面距离、喷涂点的数控定位精度等相关。当被标识部件为圆锥体时,喷嘴的方向处于非法向且距离较远时,由于喷涂介质的自重影响,会导致喷涂实际点下沉于理论位置点,造成喷涂位置产生偏差。
由于舱段产品为非平面结构,采用机械数控方式驱动喷头喷涂时,上述条件中最易发生变化的是喷涂的距离。而由上述关系可知,若喷涂的速度、方向一定的情况下,当喷涂的距离发生变化即非等距喷涂时,若要保证喷涂的质量则必须计算出墨液喷射轨迹由于自重的偏差量对精度影响的定量关系。而评价两者之间的关系较为复杂,而且受实际情况的影响较大,不适宜实际使用。
综上所述,为达到喷涂线条宽度、精度等指标,必须控制喷射点距离被喷射表面的距离和方向,保证两者之间的空间距离不变,即实现等距喷涂,以达到最优的喷涂标记质量。
3.2 等距喷涂中非规则曲线的数控轨迹分析
等距喷涂的理论及方法是保证实际喷涂质量与线条位置精度的重点及难点。以近圆锥体舱段为例,表述等距喷涂的原理。图1中实线为实际待喷涂的产品表面,虚线为其等距面,即喷射点所形成的喷涂面。
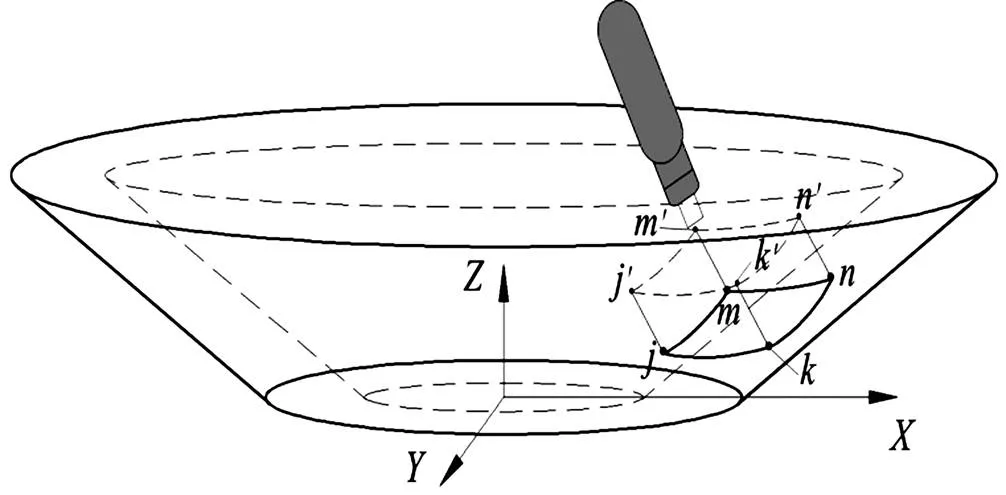
图1 近圆锥面内廓形面喷涂X方向正方形示意图
若在近圆锥体表面喷涂一矩形轮廓,那么在理论圆锥面与等距圆锥面(实际为喷枪出口点形成的轨迹)上分别形成''''两个空间封闭曲线。其中,曲线''''为该截面圆上的弧线,''''为近圆锥面的不规则曲线。在数模中能够通过计算快速得到这些理论点在舱段坐标系下的空间位置坐标,但是采用数控驱动时,若采用简单的四点连线的方式进行轨迹移动形成矩形轮廓,而被喷涂表面为不规则曲面,因此达不到立项的喷涂效果。
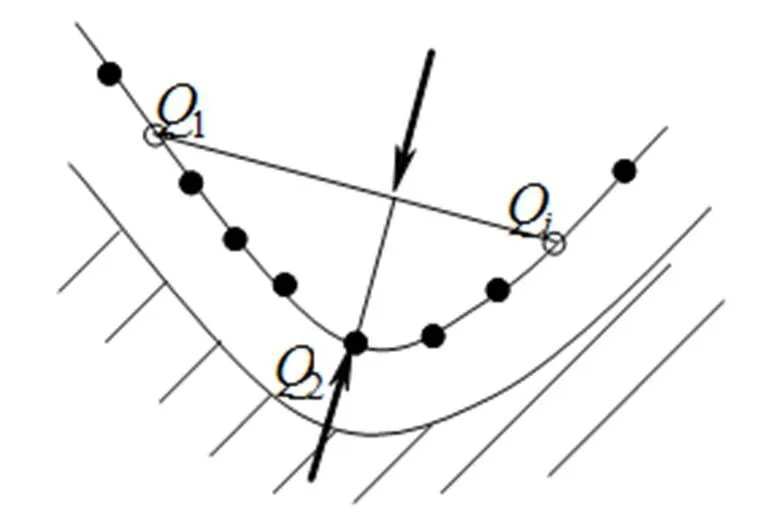
图2 等误差型值点选取
对于规则圆弧曲线来说,通过数控系统中简单的数控插补方法实现等距喷涂;但对于这种非规则曲线的运行轨迹的精度控制,采用插补是远远不够的,最好的办法是通过加密采样点,通过加密曲线上关键型值点控制等距的程度,使理论轨迹距实际被喷涂面近似等距。采样点(或关键型值点)布局越密集,喷涂距离的误差就越小,就越接近等距,但密集程度越高,影响数控系统的反馈速度,计算量较大。在这里引入型值点的弦高以评价点的密集程度,如图2所示。图中1点为''或''上任意点,如点',Q为轨迹移动的下一点,2为1和Q的中间过渡点。1和Q之间能够形成一条直线轨迹,若不做处理,则会形成的差值,造成理论和实际型面不等距。引入作为密集度值,若<,则Q+1→Q;按Q+1点再次评价和关系,直至≥时,确定Q+的坐标值位置,进而形成完成曲线上的数据点集[],该点集即为理论行走轨迹。
4 回转体舱段内表面的等距喷涂方法
圆柱体舱段为圆锥体舱段的特殊形式,因此下面以圆锥回转体舱段为例(如图3所示),介绍其内表面的等距喷涂方法及喷涂点的轨迹计算方法,为驱动多轴联动机床编程做指导。由前述分析可知,在圆锥体表面实现等距喷涂有两种方式:喷射轴线垂直于舱段回转轴线或喷射轴线垂直于舱段母线(即型面的法线方向)。

图3 圆锥体舱段构型
4.1 垂直于回转轴线的等距喷涂方法
首先以喷射轴线垂直于舱段回转轴线建立起几何模型,见图4。

图4 等距喷涂理论几何模型
其中,为顶圆半径,为底圆半径,为圆锥高度,为舱段产品锥度,1为当前喷射点所截圆半径,Δ1为当前喷射点所截圆与顶圆的半径差,为当前喷射点距离圆锥下底面的距离。各变量对应关系如式(1)所示。

其中,2≤x+y≤2;≤≤。
以采用墨液喷射方向垂直于圆锥轴线的方式喷涂一个矩形轮廓为例。在舱段被喷射表面会形成四条交线(曲线),平行于底面的两条线、和垂直于底面的两条线、。如图5中两条粗曲线所示。

图5 墨液喷射方向垂直于圆锥轴线构型
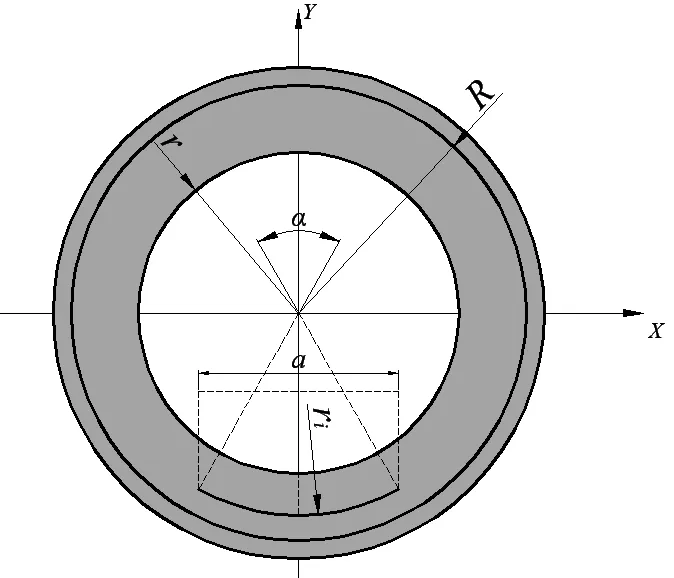
图6 舱段中喷射方向垂直于轴线几何模型
如图5、图6所示,为底圆半径,1为喷射点所在圆半径,为喷射轨迹长边,为喷射轨迹短边,为喷射轨迹长边在曲面上的投影的角度范围,1为喷射点初始高度坐标。依照图中各变量及其对应关系,可获得喷射轨迹所在平面和舱段被喷射表面的交线公式(3)。

由式(3)可推出,、上喷射点所形成的轨迹为式(4)所示。
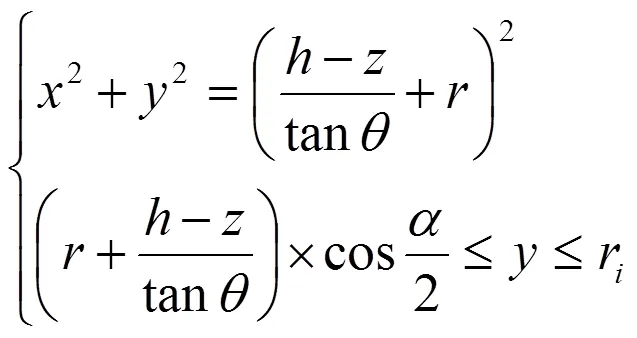
其中,0≤≤/2=11+。
垂直于底面的长方形向曲面水平投影,垂直于底面的两条边所形成交线、。按照以上算法,即可得到该交线的轨迹公式(5)。

其中,=±/21≤≤1+
4.2 垂直于舱段母线的等距喷涂方法
喷射轴线垂直于舱段母线(即型面的法线方向)时模型的建立要较上述简单。还是以喷涂一个矩形轮廓为例说明轨迹的计算方法,会得到四条交线(曲线),见图7所示。构建起如图所示的数学模型,其中为底圆半径,r为喷射点所在圆半径,为喷射轨迹长边,为喷射轨迹短边。
定义入射点1(1, -/2,1)、1(1,/2,1),11中点1在平面内投影点1' (, 0,)。

图7 喷涂方向垂直度舱段表面的几何构型
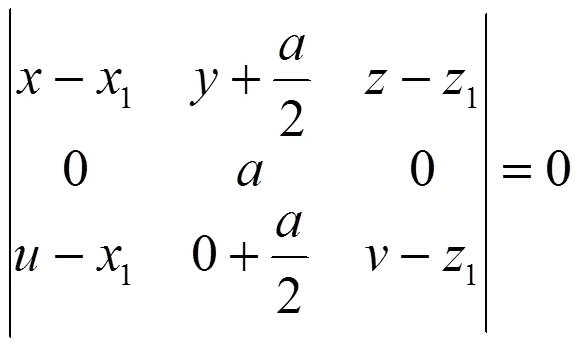
有几何关系可知,111'平面和舱段外形面形成的交线即为喷射线,而111'平面即为式(6)所示。同样的方法可得出两外几条喷射线的解法。
5 数控自动喷涂工艺调试与试验验证
5.1 喷涂设备硬件
5.1.1 机床
多轴加工中心可调整范围大,可以满足回转体各尺寸范围舱段的画线定位。其主轴头能够实现回转体舱段型面上任何一点的法向姿态的调整。
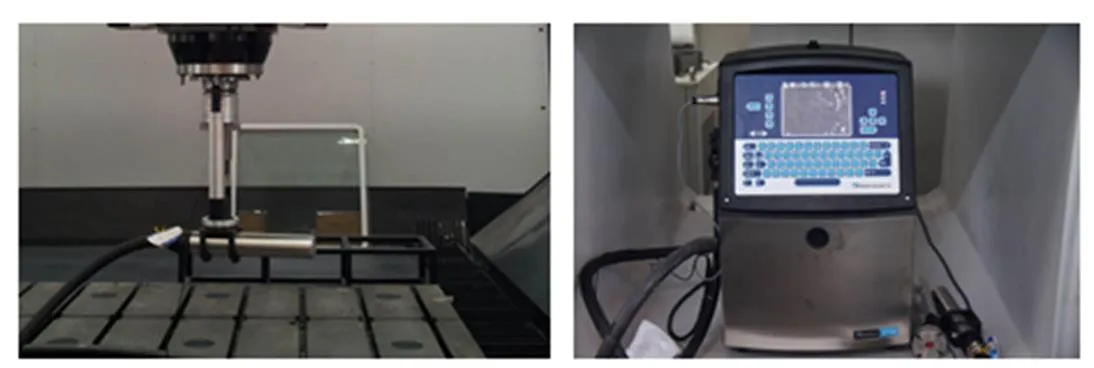
图8 自动喷涂标识平台
5.1.2 喷涂装置
喷涂装置采用连续喷射式喷码机。该型喷码机喷涂速度高、喷印距离远,对喷头的适应性较广。喷涂介质采用快干型油墨,能够达到1s内固化。通过OEM定制,控制喷涂控制使能,从而通过控制喷涂出口墨量的大小使该型喷码机对连续线条的标识精度得以改进,线条宽度约0.1mm,满足零件定位位置线的标识需求。
5.1.3 喷涂试验
由于复合材料舱段的变形,因此需要获取实际舱段型面数据后再进行编程处理。实测模型数据经过仿真环节后生成自动喷涂控制系统可用的XML数据,并生成所需要的MPF文件。仿真及喷涂效果如图9、图10所示。经过实际验证,自动标识的零件位置线精度和人工画线的精度完全一致,自动标识技术可以完全取代人工画线的零件定位模式,可以避免人为导致的定位错误或超差的质量问题,提高舱段的装配制造效率。
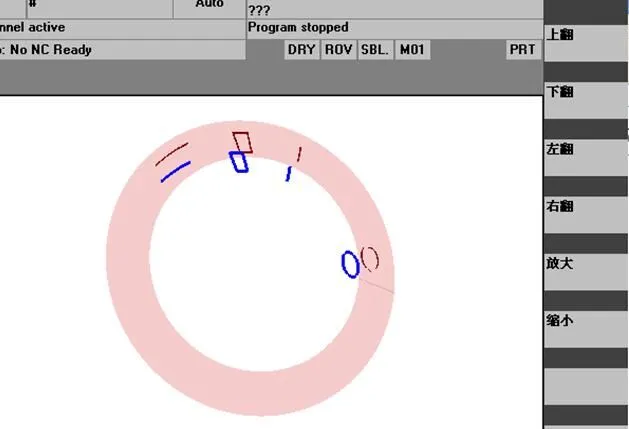
图9 虚拟仿真视图界面

图10 回转体舱段零件定位位置自动标识效果
6 结束语
传统的通过画线定位零件位置的方式已不能满足产品装配质量一致性、装配效率的需求,通过理论分析和试验验证,本文所采用的自动喷涂标识零件位置的方法能够实现零件位置的准确标记。主要得到以下结论:
a. 将自动喷涂标识技术和数控技术相集成,实现火箭舱段中零件位置定位标识的自动化。
b. 自动化的等距标识方法能够实现零件位置线的准确性。
c. 具有回转体结构的舱段产品,采用喷射出口垂直于产品轴线或母线(即型面的法线方向)的方式能够保证等距喷涂效果,并能够实现和数控编程系统的有效结合。
d. 通过试验验证,自动化的等距喷涂方法可以完全取代人工画线的零件定位模式,可以避免人为质量问题,大大提高舱段的装配制造效率。
1 《航空制造工程手册》总编委会.航空制造工程手册——飞机装配(2版)[M].北京:航空工业出版社,2010
2 郭飞燕,王仲奇,康永刚,等.基于坐标孔的数字化柔性工装定位技术[J].计算机集成制造系统,2013,19(4):720~726
3 王亮,李东升,罗红宇,等.飞机装配数控柔性多点工装技术及应用[J].北京航空航天大学学报,2010,36(5):540~544
4 魏乐愚,杨宏青,荣田.自动对接装配技术在航天产品对接装配中的应用研究[J].航天制造技术,2011,10(5) :42~44
5 Hartmann J, Meeker C, Weiier M, et al. Determinate assembly of tooling allows concurrent design of airbus wing sand major assembly fixtures[J]. SAE Paper, 2004(1): 28~32
6 Hartmann J. Automated wing panel assembly for the A340-600[J]. Society of automotive engineers, 2000, 7(1): 44~47
7 刘胜兰,罗志光,谭高山,等.飞机复杂装配部件三维数字化综合测量与评估方法[J].航空学报,2013,34(2):409~418
8 王跃,谭民,景奉水.多机器人协调操作大型物体的运动学分析及应用[J].机器人,2002,24(5):451~455
9 张文捷,王海峰,戴军,等.卫星装配定位器平台智能调平系统设计[J].航天制造技术,2012,6(3):24~27
Equidistance-spraying Method of Locating Identification for Revolving Components Assembly
Wang Xin1Guo Hongjun1Wang Aichun1Han Zhichang2Wang Juan2
(1. Aerospace Research Institute of Materials and Processing, Beijing 100076; 2. Representative office of Rocket Force, Beijing 100076)
The quality problems of revolving component assembly, especially including assembly accuracy consistency of the parts, are quality hidden perils existing in the assembly process. To this end, auto-spraying identification and NC are integrated into the assembly processing, and a new comprehensive equidistance-spraying method is proposed based on the analysis of influence factors of its precisions and geometric models. Finally, equidistance-spraying platform of locating identification is built. The experimental verification shows that the automatic equidistance-spraying method of locating identification can replace the traditional artificial lineation,and the conformity of assembly accuracy is improved.
automatic spraying;equidistance-spraying identification;locating of parts;assembly accuracy
王新(1985),高级工程师,复合材料及制造专业;研究方向:复合材料及其构件先进制造技术。
2018-02-26
猜你喜欢
青少年科技博览(中学版)(2023年5期)2023-06-26 09:39:52
数学物理学报(2020年6期)2021-01-14 01:00:26
趣味(数学)(2020年12期)2020-06-09 05:39:18
制造技术与机床(2019年4期)2019-04-04 12:21:26
数学物理学报(2016年3期)2016-12-01 05:36:26
小学生导刊(低年级)(2016年2期)2016-02-24 22:42:11
电源技术(2015年2期)2015-08-22 11:28:02
中央民族大学学报(自然科学版)(2015年1期)2015-06-11 02:56:40
振动工程学报(2014年4期)2014-03-01 01:15:33
作文周刊·小学一年级版(2013年9期)2013-04-29 00:44:03