
光纤光栅静力水准仪设计
2018-05-16 03:47戴玉堂张东生张秋波
自动化仪表 2018年5期
陈 鹏,戴玉堂,张东生,张秋波
(武汉理工大学光纤中心,湖北 武汉 430070)
0 引言
针对岩土体竖向变形监测的传统方法主要包括静力水准仪监测法、沉降桩监测法、沉降板监测法、不动杆法等[1-4]。这些测量方法简单、测量精度低、数据采集不便,且易受周围干扰因素的影响,因此基于光纤光栅的监测方法应用而生。光纤光栅传感器具有抗干扰能力强、耐腐蚀、体积小[4-8]等优点。2010年,曹春耕设计了一种光纤光栅类静力水准仪。该静力水准仪生产加工难度较大,且易造成光栅折断。2012年,李涛等人设计了另一种光纤光栅静力水准仪。其初始状态就处于拉伸受力状态,因此一段时间后,容易造成光栅载体发生塑性变形,需要重新标定,给实际工作带来不便。2015年,张晶等人设计了一种基于光纤光栅传感器的多通路静力水准装置。但该种结构的弊端是精度降低,因为定滑轮本身的摩擦会给浮力的正常测量带来误差,同时定滑轮的润滑也给传感器的维护带来困难。
本文设计了一种全新的光纤光栅静力水准仪,并且进行了理论推导和试验验证。
1 监测原理
一个完整的静力水准系统包括若干静力水准仪、储液罐、数据采集记录仪以及计算机等。所有静力水准仪与储液罐之间通过通液管相连而形成连通器。根据连通器原理,储液罐中的液体通过通液管进入每一个静力水准仪,并保证所有静力水准仪内液面与储液罐内液面在同一水平面。静力水准系统示意图如图1所示。

图1 系统示意图Fig.1 Schematic diagram of system
在使用过程中,每一个静力水准仪固定于岩土体的某个位置而成为一个沉降测点。在储液罐内液面不发生变化的情况下,当某个测点所在岩土基体发生沉降时,固定于该测点的静力水准仪也会发生竖直方向移动。根据连通器原理,该静力水准仪内液面相对于储液罐内液面并未发生变化,变化的是该静力水准仪内的液体深度,即液面与该静力水准仪内底面之间的相对距离,且液体深度的变化量与测点在竖直方向的沉降量大小相等。因此,通过检测相应测点的静力水准仪内液体深度的变化,即可得知该测点的沉降变化量。
静力水准仪测量原理图如图2所示。

图2 测量原理图Fig.2 Measuring principle
假设某静力水准系统中共有n个静力水准仪,各静力水准仪用连通管与储液罐连通,且储液罐体积足够大,其液面高度基本不发生变化。以第i个静力水准仪为测量基准点,第j个静力水准仪为待测观测点。安装完成后,初始状态时各静力水准仪的安装高度分别为:Y01、Y0i、Y0j、Y0n。各静力水准仪内的液面高度分别为:H01、H0i、H0j、H0n。
根据连通器原理,各个静力水准仪内液面相对于水平面的高度为:
Y01+H01=Y0i+H0i=Y0j+H0j=Y0n+H0n
(1)
当基体发生第k次不均匀沉降后,各测点由于沉降而引起的安装高度变化量分别为:ΔYK1、ΔYKi、ΔYKj、ΔYKn。
此时,各静力水准仪内的液面高度分别为:HK1、HKi、HKj、HKn。
Y01+ΔYK1+HK1=Y0i+ΔYKi+HKi=Y0j+ΔYKj+HK1j=Y0n+ΔYKn+HKj
(2)
由式(2)可得,第j个观测点相对于基准点i的相对沉降量为:
ΔYji=ΔYKj-ΔYKi=(Y0i+HKi)-(Y0j+HKj=
(Y0i-Y0j)+(HKi-HKj)
(3)
由式(1)可知:
Y0i-Y0j=H0j-H0i
(4)
将式(4)代入式(3),可得出第j个观测点相对于基点i的相对沉降量为:
ΔYji=(H0j-H0i)-(HKj-HKi)
(5)
若式(5)结果为正,表示观测点相对于基准点上升;结果为负,则表示观测点相对于基准点下降。由式(5)可知,只要能够测出基准点和待测点前后不同时间的液面高度值,即可得到任一待测点相对于基准点的沉降值。
使用过程中,将第i个静力水准仪作为参考对象,它所在位置通常认为是固定不变的,即不会发生竖直方向上的沉降,所以可以认为H0i=HKi。故式(5)可以简化为:
ΔYji=H0j-HKj
(6)
而在实际安装过程中,在条件允许的情况下,可以人为调整各个静力水准仪的安装高度,使得各静力水准仪的初始安装高度相同。此时各静力水准仪内的液面在同一水平面上,并以此高度为初始零点,这样待测点的初始高度H0j=0。于是式(6)又可进一步简化为:
ΔYji=-HKj
(7)
通过调整设置,简化了静力水准仪测量理论。由式(7)可知,只需测出任一静力水准仪在任一时刻的内部液面高度值,取其相反数即为该测点的实际沉降量。通过分析可以发现,沉降量与内部液面高度为相反数。当发现静力水准仪内液面上升时,其所在测点实际在下降;而当发现静力水准仪内液面下降时,其所在测点实际在上升。这种现象与连通器原理相符。若想通过静力水准仪检测地基沉降大小,则必须测得其内部液体的深度,所以对于液体深度的测量才是静力水准仪设计的关键。
2 光纤光栅静力水准仪结构设计
光纤光栅静力水准仪示意图如图3所示。传感器整体由上腔和下腔组成。上腔包含对称布置的两个等强度梁、出纤管以及粘贴于等强度梁表面的光纤光栅,下腔包括隔板、顶杆、浮筒、卡环、通气三通阀、通液三通阀、二通阀以及液位指示管。顶杆与浮筒相连接并贯穿上下腔。三通阀与上一个光纤光栅静力水准仪和下一个光纤光栅静力水准仪相连接。其中,通气三通阀保证下腔气压值相同而不影响精度,通液三通阀保证所有静力水准仪与储液罐内液面在同一水平面,透明的液位指示管可以指示液位,便于观察。

图3 静力水准仪示意图Fig.3 Schematic diagram of the static level instrument
在工作过程中,液体通过连通管和通液三通阀,从储液罐进入光纤光栅静力水准仪下腔内。随着下腔内液体增多,液位慢慢升高,浮筒浸入体积慢慢增大,其所受浮力也逐渐增大。当所受浮力大于浮筒自身重力时,浮力与重力合力向上并作用于两个等强度梁;等强度梁在向上的力作用下产生形变,从而产生应变变化,粘贴于其表面的光纤光栅所受应变也发生变化。根据光纤传感原理,波长发生漂移。通过收集波长变化数据,即可得到相应液位变化量。
3 光纤光栅静力水准仪试验
为验证传感器实际测试效果,按照设计方案加工制作了量程为150 mm的光纤光栅静力水准仪试验品。下面主要进行沉降测量试验和温度补偿试验。
3.1 沉降测量试验
静力水准系统平台主要由储液罐、光纤光栅静力水准仪、升降台、解调仪以及计算机等组成。储液罐固定不动,供水管向其内不停地注水,水溢出后流入水槽里,储液罐中的液面始终保持不变,可以用来作为基准水平面。储液罐与光纤光栅静力水准仪通过水管相连,并构成了连通器。光纤光栅静力水准仪固定于升降台上,相当于一个待测点;通过旋动升降台旋钮,可以调节待测点在竖直方向上的位置高度。
注水之前,调节升降台使静力水准仪下底面稍低于液面基准面,并开始保存数据,记录下此时的光栅波长数据,并作为沉降量为0 mm时的初始值。开始供水,待水从储液罐中溢出后开始调节沉降台,使光纤光栅静力水准仪向下移动。每次移动50 mm,每个点保持一段时间,待波长数据稳定后继续向下移动静力水准仪,直至移动到150 mm处。调节升降台,使光纤光栅静力水准仪上升,依次移动到100 mm、50 mm、0 mm处。这样就完成了一次测点下降与上升的测量。测点下降过程中,静力水准仪内液面上升,测点上升过程中静力水准仪内液面下降。波长变化量曲线如图4所示。
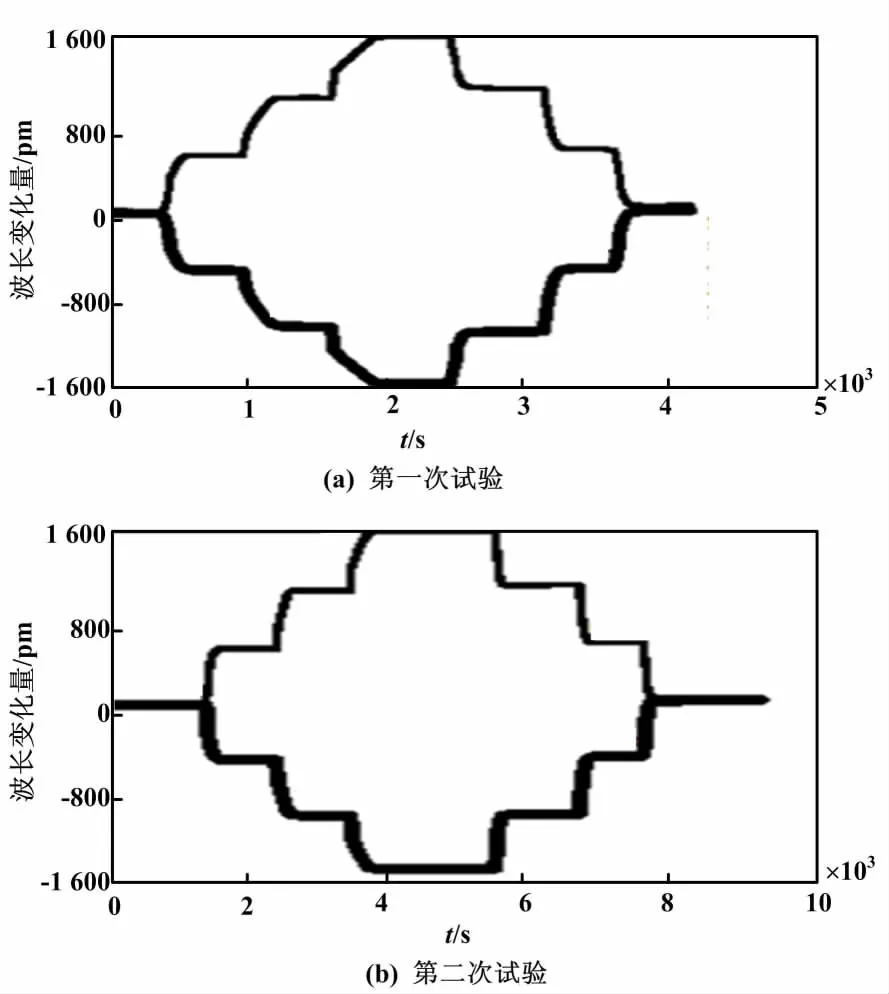
图4 波长变化量曲线Fig.4 The wavelength variation curves
实时保存试验过程波长数据,记录每一个位置点对应的稳定波长数据,取初始位置0 mm处为波长变化零点,计算出每一个位置点对应的波长变化量。由于一号光栅波长变大、二号光栅波长变小,故一号光栅的波长变化量为正、二号光栅波长变化量为负。
在波长随时间变化曲线中,曲线上的每一个台阶对应一个升降位置点。该位置点的波长数据保持不变,这样就可以得出两次试验过程的任一个位置点所对应的波长数据。由图4可以看出,单个光栅在曲线阶点处波长非常稳定,说明传感器本身测量性能很稳定;单个光栅在一次上升和下降中相同位置点所对应波长变化量非常相近,在不同次试验中相同位置点所对应波长变化量也非常相近,说明传感器测量的重复性非常好。
在一次下降或上升过程中,一号光栅与二号光栅的波长变化量之差即为传感器的最终输出数值。光栅波长变化量曲线如图5所示。 由图5可知,传感器输出值在每一个位置点都非常稳定,上升和下降过程重复性非常好,两次试验重复性也非常好。

图5 光栅波长变化量曲线Fig.5 The grating wavelength variation curves
当沉降量为0 mm、50 mm、100 mm、150 mm时,沉降试验数据如表1所示。

表1 沉降试验数据Tab.1 Data of the settlement experiment
试验拟合曲线如图6所示。

图6 拟合曲线Fig.6 The fitting curve
两次试验中,测点上升和下降各两次,每一次上升或下降过程中的一个位置点就对应一个波长变化量。以波长变化量之差为纵坐标值,以位置高度为横坐标值,可以得到四组坐标值;每一组坐标值都有四个坐标点。
上述拟合过程得到的四条拟合直线的方程如下。
第一次测点下降Y1=-7.04+20.948 2X1、拟合度R=0.999 92;
第一次测点上升Y2=10.23+20.966 6X2、拟合度R=0.999 82;
第二次测点下降Y3=-2.92+20.857 6X3、拟合度R=0.999 98;
第二次测点上升Y4= 2.72+20.736 4X4、 拟合度R=0.999 70。
由拟合结果可知,四条拟合直线几乎完全重合,直线斜率非常接近,说明了该光纤光栅静力水准仪的重复性非常好,其灵敏度平均值为20.877 2 pm/mm。
两次沉降试验拟合结果如表2所示。

表2 两次沉降试验拟合结果Tab.2 Fitting results of two settlement experiments
3.2 温度补偿试验
本光纤光栅静力水准仪采用差动式结构,具有温度自补偿功能,即外界温度变化可以影响单个光栅波长,但不会影响传感器总体沉降输出值,故需要对该温度补偿功能进行检验。试验装置与沉降测量试验装置相同。由于试验条件所限,试验装置无法放入温箱内,故选择在冬日室温条件下进行。验证方法为:根据沉降测量试验得到的试验结果,将相应传感器标定参量输入解调仪软件,从而得到沉降量输出值;然后将正在进行沉降监测的光纤光栅静力水准仪固定于某一位置且保持竖直方向位置不变。通过外部供水系统向储液罐内注水,待液面稳定后停止注水。此时开始保存数据,连续保存数据超过17 h。
两光栅波长变化曲线如图7所示。整个试验过程中,一号光栅波长最大变化量为105 pm,二号光栅波长最大变化量也为105 pm。从单个光栅的波长变化可以看出环境温度变化对光栅本身的影响较大,故若仅利用一个光栅测量液位的变化会产生很大的误差。

图7 两光栅波长变化曲线Fig.7 Two grating wavelength curves
根据前述的温度补偿理论,将两光栅的波长变化量之差作为综合输出结果,把沉降试验得到的灵敏度等结果作为标定数据输入解调软件,可以得到经温度补偿后的沉降量输出值。沉降量曲线如图8所示。

图8 沉降量曲线Fig.8 Settlement curve
由图8可知,整个测量过程中传感器输出沉降值变化范围为40.93~41.36 mm,沉降变化量只有0.43 mm。
4 结束语
本文提出和设计了一种新型的的光纤光栅静力水准仪结构,并推导了工作原理。通过试验,模拟了在岩土地层沉降时该静力水准仪的工作状态,验证了静力水准仪的实用性和有效性。此外,该结构的温度自补偿功能大大保证了静力水准仪的监测精度。该水准仪具有较高的使用价值和广阔的应用前景。
参考文献:
[1] 杨学存,侯媛彬.超声波静力水准仪的研制[J].工矿自动化,2005(4):25-27.
[2] 叶国良.地基基础沉降观测方法综述[J].中国港湾建设,2003(3):18-21.
[3] 陈光富,蔡德所,刘健夫,等.一种新型铁路路基沉降监测技术探讨[J].铁道建筑,2011(6):90-92.
[4] STROZZI T,WEGMULLER U.Land subsidence monitoring with differential SAR interferometry[J].Photogrammetric Engineering & Remote Sensing,2001,67(11):1261-1270.
[5] CULSHAW B.Bragg grating fiber optic sensing for bridges and other structures[J].Spie,1994(5):162-167.
[6] 陈琦.光纤光栅传感技术的原理与应用[J].科技信息,2011(19):90.
[7] 陈肖,张东生,吴梦绮,等.差动式光纤布拉格光栅渗压传感器的研究[J].自动化仪表,2017,38(7):61-65.
[8] FERRARO P,NATALE G D.On the possible use of optical fiber Bragg gratings as strain sensors for geodynamical monitoring[J].Optics & Lasers in Engineering,2002,37(23):115-130.
猜你喜欢
防爆电机(2022年1期)2022-02-16
昆钢科技(2021年6期)2021-03-09
装备制造技术(2020年4期)2020-12-25
发电设备(2020年5期)2020-10-09
科学咨询(2020年43期)2020-03-04
传动技术(2019年1期)2019-09-05
建材发展导向(2019年11期)2019-08-24
新商务周刊(2018年7期)2018-12-08
中国锰业(2018年3期)2018-07-11
汽车与驾驶维修(维修版)(2017年4期)2017-07-18
