STM32嵌入式平台下四旋翼飞行器模型研究
2018-05-11 06:20李成勇
无线电工程 2018年6期
李成勇
(重庆工程学院 电子与物联网学院,重庆 400056)
0 引言
20世纪90年代之后,随着微机电系统研究的成熟,仅几克重的惯性导航系统被研制出来,使得多旋翼飞行器的自动控制器成为可能。但是传感器数据噪音很大,直到2005年左右真正稳定的多旋翼无人机自动控制器才被制作出来。2010年,法国Parrot公司发布了世界上首款流行的四旋翼飞行器AR.Drone。AR.Drone的流行让四旋翼飞行器开始广泛进入人类社会。2012年2月,宾夕法尼亚大学的Vijay Kumar教授在TED上做出了四旋翼飞行器发展历史上里程碑式的演讲。
许多灾情场合人工操作对抢救人员带来了非常大的安全隐患,如火灾现场、煤炭瓦斯事故现场等[1]。这些场合由于灾情不明确,救援人员不能贸然到现场,只有在短时间掌握灾情现场确定的人员情况、具体位置等,救援人员才能以最小的伤亡处理灾情现场。近年来,无人机逐渐出现救援现场,由于这种小型飞机是无线控制,救援人员不需要提前进入火灾现场,通过无人机遥控,短时间掌握火灾现场情况,包括火势分布、大小和人员具体位置等,然后根据火灾现场情况,制定救援计划,避免因灾情不明确导致不必要的损失。但目前无人机技术还需要完善,包括控制芯片水准等,不能达到预定目标[2]。通过分析多种无人机设计方案及控制器选择,制作了四旋翼飞行器模型,主要功能是自主飞行、高空悬停及距离预警。通过手机遥控,可以准确地按指定路线飞行,在必要的空中位置悬停,进行现场数据采集,遇到障碍物到一定距离发出报警,调整飞行方向,可以适用于特殊现场的情况收集。
1 系统总体设计
1.1 方案设计
采用Arduino Genuino Mega为控制芯片,其比51系列单片机最大优势在于I/O比较多,本系统设计需要多路数字输入/输出口,而Arduino Genuino Mega适合需要大量IO接口的设计,但不能满足实现本装置的精度和运行速度要求[5]。
采用STM公司生产的嵌入式STM32f103T8U6 MCU板为主控芯片,此单片机运算功能强、可用的编程软件多、可选择性大、飞控代码基于MWC、稳定简洁、便于开发。STM32系列嵌入式芯片具有ARM Cortex-M3内核,内部资源丰富,I/O口最多可达112个,有多种通信方式,可以自由扩展外部接口电路,资源使用方便[6-7]。因此本系统选择嵌入式STM32进行实验操作及模型搭建。
四旋翼飞行器也称为四旋翼直升机,是一种有4个螺旋桨且螺旋桨的形状是十字形交叉,每个螺旋桨有独立的电机单独驱动,其螺旋桨支架结构如图1所示。

图1 四旋翼飞行器结构示意
当飞行器处于飞行状态时,螺旋桨以支架为中心,相对螺旋桨以正向转动,相邻螺旋桨反向转动,这样飞行器以垂直方向上升,同时可以通过电机转停时间长短来控制螺旋桨速度的增加或减小。所以飞行器的悬停、俯仰等各类运行轨迹动作是通过改变4个螺旋桨的运动方向和速度产生。
1.2 硬件系统与实现
四轴飞行器采用传感MEMS分支,用敏感元件(电容、压电和热电偶等)来感受转换电信号的器件和系统。自助飞行器的结构拥有均匀性、对称性、稳定性三大特征。要求材料的质地均匀、架构对称、连接牢固且在起飞和着陆时机架有抗抖、抗击能力,机身支架采用薄而轻的硬质塑料。飞行器的硬件组成如图2所示,主要包括角速率陀螺、超声波传感器、微处理器、陀机控制接口和有效电源。

图2 飞行控制硬件组成
1.2.1 陀螺仪
陀螺仪主要用于飞行器保持平衡,陀螺仪的测量物理量是偏转、倾斜时的转动角速度。陀螺仪实际上等于3个角速度传感器,内部通过MENS工艺做出了一个参考坐标系[8],当芯片的坐标相对参考坐标发生旋转时,芯片会督促这个差异。因此,测量XYZ轴线的倾角变得可以实现。利用陀螺效应,感知陀螺仪中陀螺的相对方向,经过嵌入式控制器处理与初始状态比较感知陀螺的方向,可以对飞机等的运动方向进行感知[9],如有偏航可以立刻对制动系统发出指令进行修正,本系统采用MPU6050,三轴陀螺仪,自带DMP四元数输出,内部拥有温度补偿。
1.2.2 控制系统
再后来,潘际銮退休了,退休后重新开始招博士生,重新组建自己的团队,把他昔日的老部下召集到一起,一群八九十岁的人带着一群年轻人,在清华大学机械工程系的焊接馆里发光发热。
四旋翼飞行器的控制系统分为两部分:飞行器控制系统与航模电机调速系统,飞行控制系统主要功能作用是检测飞行姿态,其由加速度传感器和陀螺传感器组成的IMU惯性测量单元实现。飞行器控制控制螺旋桨上的电机是通过I2C总线通信[10]。飞行姿态是4个直流电机转速大小及方向来确定。飞行器控制要能够通过采集处理微型MENS惯性器件和三维地磁传感器数据,计算飞行器姿态角和航向角[11]。航模电机是一个性能稳定、效率高和无干扰的电机,航模电机的运行图如图3所示。
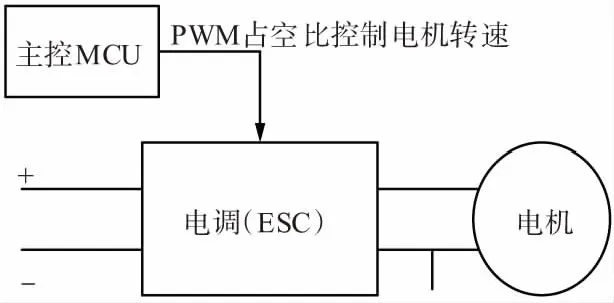
图3 航模电机运行原理
1.2.3 加速度传感器
通过改变电机转动时间长短来控制速度,速度增加或者减小测量是加速度传感器来实现,一般的加速度传感器是纳米材料制作,工艺精良,采用压电效应得到对应的物理量,可以等效测量的电压值。本方案中加速度采用的是内置IC电路压电的Mpu6050型加速度传感器,其产生的电压信号与振动量成正比。
1.3 软件设计
四旋翼飞行器在起飞、降落时,需要加速或减速。控制则需要调节PWM信号占空比,飞行时如果加速度太大会因短时间内冲量过大对机身造成伤害,为防止伤害则需匀变速缓冲,使飞行器能够平稳的加速或减速。四旋翼飞行器主程序流程图如图4所示。
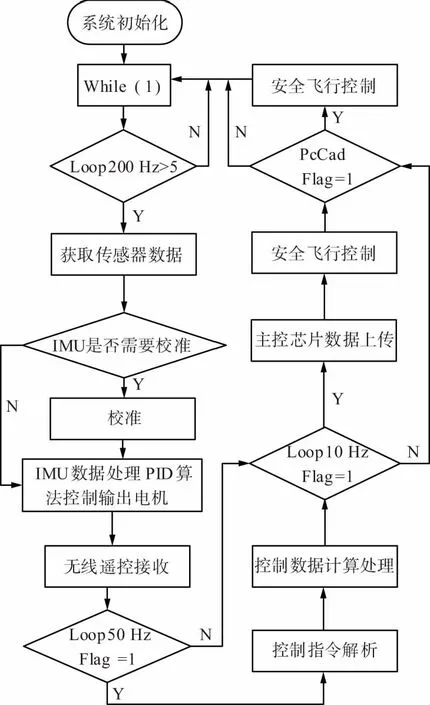
图4 四旋翼飞行器主程序流程
说明:系统采用TIM4定时器产生1 ms定时基石,定时中断中对判断标志位进行累加。从而定时各个时间段进行传感器数据获取、遥控指令和电机控制等。
本方案中程序控制采用STM32嵌入式系统固件库思路,未采用寄存器控制方式,固件库模式对PWM调制很好应用,有灵活的外设端口,采集数据端口及多个通信接口,可以直接调用,不需要单独编写代码,其中PWM调制采用特殊中断完成,执行效率高。
在本模拟调节系统中采用的是数字PID控制算法,具有较强的灵活性。PID控制算法的表达式为[12]:
(1)
式中,KP为PID控制比例;TI、TD都是一个时间常数,TI决定积分时间常数,TD决定微分时间常数;u(t)为PID控制的输出信号;e(t)为输入信号,其值是测量值减去预设值。
由于PID控制算法采用的是采样方法[13],控制量是采样时刻的偏差值来计算。因此,在PID算法控制系统中,要对输出量做离散化处理,离散的PID表达式[14]:
(2)
因为PID算法原理简单、使用方便、适应性强,PID算法有一套完整的参数整定与设计方法,易于掌握[15];本系统在控制策略的设计上采用了四轴PID控制算法,达到了很好的加载控制结果,PID的原理框图如图5所示。
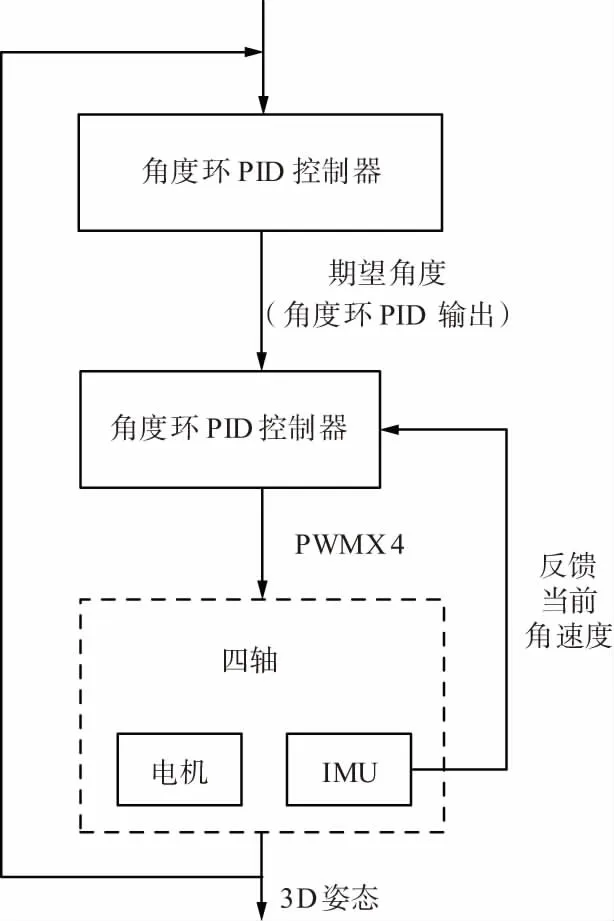
图5 PID控制算法原理
2 测试结果与误差分析
2.1 飞行测试
通过不断试飞、数据采集,在不同的高度测试4个电机的不同PWM信号值,此值为飞行器起始值状态,如表1中所示。
表1 飞行器起始值状态
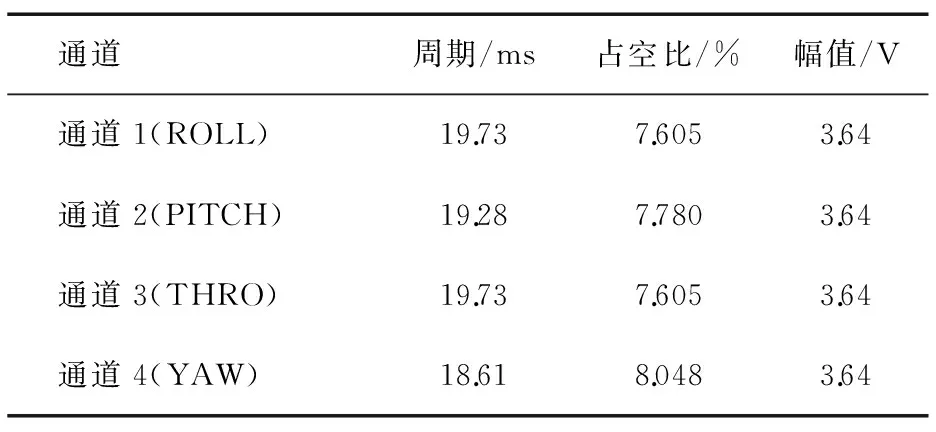
通道周期/ms占空比/%幅值/V通道1(ROLL)19.737.6053.64通道2(PITCH)19.287.7803.64通道3(THRO)19.737.6053.64通道4(YAW)18.618.0483.64
2.2 预警测试
据要求手持飞行器靠近小车,距离为0.5~1.5 m的预警结果如表2所示。
表2 预警测试结果

测试次数距离/m是否预警11.49是22.31否31.50是41.53否51.49是61.55否
通过表中数据对比可知,当有物体靠近飞行器时,距离在0.5~1.5 m范围内,都有警报声,超过1.5 m的距离时,传感器感应不到,不发出报警。飞行采集数据分析发现本系统出现以下不足:陀螺仪的控制掌握得不够熟练、控制不够稳定;实际测试和理论存在误差,补救措施不够完善。
4 结束语
本文提出的四旋翼自主飞行器探测跟踪系统,经过多次实验论证,采用STM32嵌入式作为控制芯片,辅助使用螺旋桨、压力传感器和陀螺仪等,实现了四旋翼飞行器在空中自由停放,在一定范围内遇到障碍物发出预警,避免出现事故。经过反复调试试验,本设计可行,且拥有简单操作、成本低的特点。
[1] 徐雪松.四旋翼无人机的多模型故障诊断[J].计算机工程与应用,2016(21):252-257.
[2] 彭程,白越,乔冠宇,等.四旋翼无人机的偏航抗饱和与多模式PID控制[J].机器人,2015(4):415-423.
[3] ZHEN Ziyang,PU Huang zhong,CHEN Qi,et al.Nonlinear Intelligent Flight Control for Quadrotor Unmanned Helicopter[J].Transactions of Nanjing University of Aeronautics and Astronautics,2015(1):29-34.
[4] 甄红涛,齐晓慧,李杰,等.四旋翼无人机L1自适应块控反步姿态控制器设计[J].控制与决策,2014(6):1076-1082.
[5] 王宏伦,邵星灵,张惠平,等.面向大跨度机动飞行的高超声速飞行器自抗扰轨迹线性化控制[J].电光与控制,2015(12):1-8.
[6] 邵星灵,王宏伦.线性扩张状态观测器及其高阶形式的性能分析[J].控制与决策,2015(5):815-822.
[7] 邵星灵,王宏伦,张惠平,等.基于微分器的轨迹线性化控制方法及其应用[J].北京航空航天大学学报,2015(7):1259-1268.
[8] 邵星灵,王宏伦.基于SMDO-TLC的高超声速飞行器姿态控制[J].北京航空航天大学学报,2014(11):1568-1575.
[9] 陈瑞杰,王宜怀,李会.一种无线代码可靠更新系统的研究与设计[J].现代电子技术,2016(4):31-32.
[10] 范云生,曹亚博,赵永生,等.四旋翼无人飞行器实验平台设计及姿态控制研究[J].计算机测量与控制,2016(7):117-120.
[11] ZHANG Guang Rui,XUE Jian.Modeling and System Identification Using Extended Kalman Filter for a Quadrotor System[J].Applied Mechanics and Materials,2013(313):313-314.
[12] 张承岫,李铁鹰,王耀力.基于MPU6050和互补滤波的四旋翼飞控系统设计[J].传感技术学报,2016(7):1011-1015.
[13] 蒋钰,谌海云,岑汝平.基于四元数的四旋翼飞行器姿态解算算法[J].制造业自动化,2015(23):77-80.
[14] 彭孝东,张铁民,李继宇,等.基于传感器校正与融合的农用小型无人机姿态估计算法[J].自动化学报,2015(4):854-860.
[15] 万晓凤,康利平,余运俊,等.互补滤波算法在四旋翼飞行器姿态解算中的应用[J].测控技术,2015(2):8-11.
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02
北京航空航天大学学报(2021年9期)2021-11-02
军民两用技术与产品(2021年9期)2021-03-09
航空发动机(2020年3期)2020-07-24
电子制作(2019年9期)2019-05-30
百科探秘·航空航天(2017年9期)2017-12-31
中学科技(2017年10期)2017-11-04
山东工业技术(2016年15期)2016-12-01
北京航空航天大学学报(2016年8期)2016-11-16
系统工程与电子技术(2016年7期)2016-08-21