基于任务规划的自动化运行技术体制设计
2018-05-11 06:20王永杰
无线电工程 2018年6期
王永杰
(1.卫星导航系统与装备技术国家重点实验室,河北 石家庄 050081;2.中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
多波束测量系统为导航卫星提供上行注入与星地双向时间同步服务,因其能够同时产生多个波束[1],在测量精度和通道一致性方面具有显著优势,逐渐成为导航卫星地面运控系统的主要设备。卫星导航地面运控系统需要不间断连续运行,星地时间同步、数传等业务要保证高可靠的自动运行,系统设备基础支撑业务包括系统标校、环路验证等过程也要保持自动化运行。多波束测量系统组成设备数量大、种类多,基于任务规划的自动化运行以及系统设备的自主管理是系统需要解决的关键问题。任务规划问题已逐步在控制科学、航空科学和信息科学等领域受到重视[2]。基于任务规划的自动化运行研究逐渐从单一任务的运行发展到多任务并行、多系统协同的系统自主管理、自主学习系统。自动化运行的设计思想是首先将复杂的控制任务和运行需求逐层分解为一系列简单的运行模式,将这些基本运行模式加工成简单的控制过程,再将简单的控制过程按照特定的逻辑控制关系逐层构建出较为复杂的控制过程,最终利用一个控制过程来实现所要求的控制任务和运行模式[3]。本文提出了一种自动化运行系统设计方法,该方法利用调度器的优化设计解决了多任务并行自动化运行管理问题,利用动态反馈机制实现运行过程的自主决策。
1 基本原理和模型建立
自动运行是系统在任务规划和条件约束下无人环境的连续运行[4],包括自动执行任务、系统组成单元的自动管理和状态恢复,适用于高可用连续运行系统的智能化控制。单任务的自动化运行相对简单,对于复杂系统的多任务高可靠并行运行是一个相对复杂的问题,运行过程中在考虑任务协同的同时,还要考虑系统组成单元的协同。
基于规划的自动运行体制可不失一般性的定义为一个多输入、多输出的自反馈系统[5]。本文研究的运行任务为已知定义空间内的任务。任务信息T表示系统任务,包括任务时间、工作参数和对象。状态信息S表示系统整体状态,包括运行模式、工作状态和参数。反馈信息F代表系统实时运行反馈数据,包括执行回执和参数变化量。系统在任意时间接收任务规划,根据任务规划、系统状态(包括工作模式)、工作流定义和约束生成系统所有组成部分可独立执行的命令。多任务协同的任务执行问题描述如下,全部任务信息包括m个待执行任务集合,每个任务包括n个执行序列,任务矩阵如下:
(1)
式中,T中一个元素tij表示的物理意义为任务集合i中第j个控制指令。对于每个任务在自动化运行过程中实际执行的工作指令序列为I=[i1,i2,…,in],I可定义为:
I=[i1,i2,…,in]=Ti*F*S。
(2)
控制指令序列根据任务状态集Ti、运行反馈数据集F以及系统实时状态S动态生成。系统根据任务集合生成初始执行序列,根据执行序列运行。系统实时接收控制序列的反馈,包括指令回执、监测到工作参数等,根据控制序列反馈和设计规则库动态调整执行序列[6]。在执行并行任务过程中,根据任务优先级和紧急程度,需要协同多任务之间的关系。
任务可以分为优先级相同的任务和优先级不同的任务,本文研究优先级不同的任务。注入和测量任务的优先级高于标校和设备巡检的优先级。当执行处理优先级高的任务时,优先级低的任务挂起,优先级高的任务执行完后低优先级任务恢复执行。在执行任务时,每个系统单元的任务注册表记录当前任务的参数[7]。任务开始执行前,先扫描所需设备工作状态,将承载该任务的工作并将低优先级的设备挂起,进行任务参数初始化工作。给定一组需要完成的任务,以及一组关于任务完成的先后次序限制,对于任意一个这样的问题,可以使用有向图来表示[8]。为了扫描每个任务的执行序列是否存在资源冲突,使用深度优先搜索执行路径。在调度方面,根据系统工作特点采用优先级作为调度的唯一标准,优先级不会动态调整。从中断方式上,任务分为可中断任务和不可中断任务[9]。不可中断任务在执行过程中不能被中断执行,否则将会造成任务差错或者损毁设备。可中断任务可随时被中断而不影响任务的继续执行。为了保证系统的灵活性,任务被设计为可中断任务。在结构上,任务协同机制采用中心处理机制[10],所有任务的调度和处理由一个中心处理单元完成调度和处理。在中心处理机制中[11],专门设计数据中心用于发布系统共享调度信息。基于规划的自动化运行技术体制模型如图1所示。
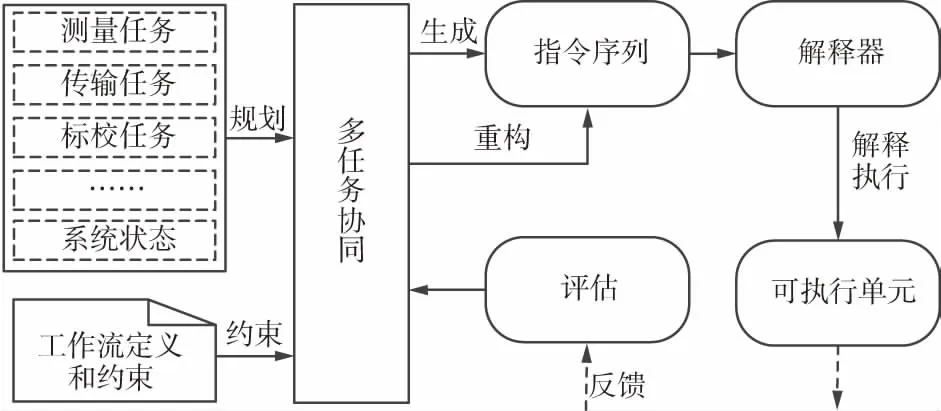
图1 自动化运行技术体制模型
2 基于规划的自动化运行实现方法
根据自动化运行模型,其实现包括2个关键部分:支持反馈的命令序列生成单元和单一执行命令的参数化封装执行[12]。支持反馈的命令序列生成单元在系统初始化时根据系统设计和配置文件生成各个任务的执行序列,该序列为任务的默认执行序列,在没有异常条件下执行该命令序列将完成预期任务。在任务执行过程中,如果遇到异常情况,将根据执行条件动态生成新的执行序列,这是自动化运行系统的关键设计之一。基于反馈的命令序列生成单元根据系统实时状态和命令执行结果自主决定下一步的执行命令[13],以及执行序列的分支处理。为了实现健壮的自动化运行,需要根据系统业务设计完备的分支和跳转[14]。在自主判断异常的情况下,需要人工介入,这时系统会记录人工处理的方法和步骤,可自动增加到系统运行约束库中,实现了自动化运行过程中动态命令序列生成的自主学习和训练[15]。通过对执行命令的接口抽象,实现单一执行命令的参数化封装,实现控制命令序列和执行单元在实现上的解耦。
系统自动运行的静态设计类图如图2所示。

图2 自动化运行实现方法
Scheduler类为系统调度和协同运行中心,完成多任务的系统处理。RealTimeState实现系统实时运行状态实时监测和指令执行的反馈。DataCenter类为所有的执行命令提供共享信息发布板,支撑多个命令之间的全局参数共享。DataCenter的设计是系统封装性和灵活性设计的一个折中考虑,该类在一定程度上增加了系统耦合性,但提供全局执行命令信息服务,降低了系统的复杂性设计。Excuter负责根据触发事件(时间、状态和事件等)执行命令。在系列命令执行的设计中通过Command模式将多条指令序列执行,控制序列中的命令各自定义其接收者[16]。使用Command设计模式抽象接口,解耦操作的对象和具有执行该操作所需信息的执行对象。系统动态生成的命令序列存储在队列中,Excuter根据设计条件循环从队列中取出单个命令执行。在设计中通过接口抽象实现了命令执行器(Executer)、控制命令以及命令执行单元的松散耦合[17]。
系统工作流程如下:
① 系统初始化,载入运行相关配置,检测系统状态判断是否具备自动化运行条件;
② 接收任务规划,分析任务所需资源、运行优先级、所占资源的起止时间等;
③ 多任务协同处理,结合任务优先级,使用深度优先搜索算法标准任务的执行路径,并对所需资源注册;
④ 将所有可并行执行的任务序列化,并生成执行列表;
⑤ 通过事件或时间触发驱动执行命令列表的执行;
⑥ 实时监测系统状态和命令回执,并根据监测结果调整命令序列。
重复执行步骤⑤、步骤⑥,直到所有任务完成。
3 试验和分析
为了验证设计方法的有效性和合理性,进行了试验和分析。在试验中设计2个并行任务同时运行,分别是注入任务(优先级最高)和标校任务(优先级中等),根据系统输出和运行日志分析系统自动化运行控制情况。标校任务为常规任务,注入任务为基于规划的任务。试验条件是系统增加6条针对不同卫星的上行注入任务,同时系统标校任务在执行。结果表明,当到达任务规划执行的起始时间时,系统能够根据规划内容和参数自动控制信号发射设备的卫星号、信号发射功率、I/Q功率比等参数,控制发射系统同时完成对6颗卫星的注入,通过观察标校设备的状态,在6颗卫星上行注入的过程中,标校设备处于暂停状态。当所有注入任务完成后,系统自动启动系统标校过程,试验数据如图3所示。
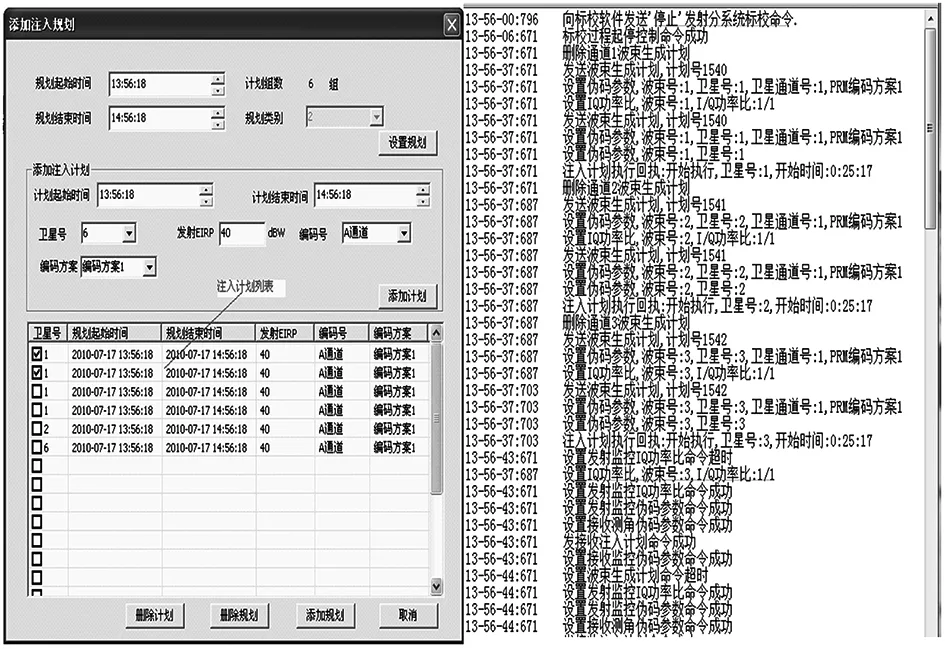
图3 自动化运行控制过程和运行日志界面
通过系统产生的日志,分析了系统自动化运行过程中指令动态产生情况,在设备均正常情况下,系统能够通过中断低优先级的任务,执行高优先级的任务。在模拟设备异常情况下,系统能够根据系统配置主动对故障设备进行复位,而后重新执行该命令从而使该任务能够成功完成。
4 结束语
通过对多波束测量系统可靠自动化运行的分析和设计,突破基于过程的自动化控制方法,提出一种基于任务规划的自动运行系统设计方法,该方法采用支持反馈的命令序列生成模型,通过多任务自主化协同调度,实现了系统多个并发任务的稳定自动运行。同时支持在运行过程中通过自主学习,增强系统的健壮性和智能化。试验表明,利用基于规划的自动化运行方法,能够解决复杂系统多任务并行执行问题。为了进一步提高自动运行系统的智能化水平,在后面研究工作中将在自动化运行控制模型的自主学习和训练方面开展更深入的研究。
[1] 肖遥,蔚保国,翟江鹏.全空域球面数字多波束天线波束控制方法研究[J].无线电工程,2017,47(3):39-42.
[2] 沈林成.飞行器任务规划技术综述[J].航空学报,2014,35(3):593-606.
[3] 朱宏涛.基于过程的开放式TT&C自动化运行体系研究[J].遥测遥控,2010,31(3):50-54.
[4] 张博,康凤举,阎晋屯.无人舰艇集群攻击任务规划优化模型仿真[J].计算机仿真,2014,31(11):24-28.
[5] 王士成.卫星运行控制系统混合模式架构研究[J].无线电工程,2013,43(3):1-3.
[6] 张正强,郭建恩,王鹏.基于AHP的遥感卫星任务规划效能评价方法[J].无线电工程,2012,42(1):36-39.
[7] FREEMAN E,FREEMAN E,SIERRA K,et al.Head First Design Patterns[M].南京:东南大学出版社,2005.
[8] 刘基余,李征航.全球定位系统原理及应用[M].北京:测绘出版社,1993.
[9] 李源泉,申建平.多目标自动运行设计[J].无线电工程,2012,42(6):35-38.
[10] 高京龙.航天测控站无人值守技术分析[J].无线电工程,2011,41(12):38-40.
[11] 高山,刘桂生,李天宝,等.Ka频段设备自动校相模型优化[J].无线电工程2014,44(10):77-80.
[12] 田志垒,吴新峰,孙越,等.基于计划任务运行的测控设备软件体系设计与实现[J].遥测遥控,2008,29(3):6-11.
[13] 叶建设,鲍忠贵.一体化航天测控软件框架研究与关键技术[J].无线电工程,2008,38(5):46-49.
[14] 吴江,陈宗基,赵世钰.面向服务的通用任务规划仿真集成方法研究[J].系统仿真学报,2009,21(2):547-550.
[15] 张华,赵旭凇,程俊强,等.TD-LTE规划仿真方法及实例[J].移动通信,2011,35(Z1):36-41.
[16] 黄劲安.基于Crosswave射线追踪模型的TD-LTE规划仿真[J].移动通信,2014,38(24):76-81.
[17] 蒋远.聚焦无线网络规划打造TD-LTE精品网络[J].移动通信,2013,37(23):38-45.
猜你喜欢
娃娃乐园·综合智能(2022年3期)2022-04-19
北京大学学报(自然科学版)(2022年1期)2022-02-21
科学技术创新(2021年11期)2021-05-25
中国生物医学工程学报(2019年6期)2019-07-16
电子制作(2019年7期)2019-04-25
宇航计测技术(2018年3期)2018-09-08
军营文化天地(2018年2期)2018-04-20
自动化学报(2016年3期)2016-08-23
中国老区建设(2016年9期)2016-02-28
海军航空大学学报(2015年4期)2015-02-27