
油菜联合收割机割台研究现状
2018-05-10 08:11伍文杰吴崇友
江苏农业科学 2018年7期
伍文杰, 吴崇友
(农业部南京农业机械化研究所,江苏南京 210014)
油菜是我国主要的油料作物之一,种植区域广泛,南北均有种植,且种植面积大[1],2014年种植面积达 758.79万hm2,年产量达1 477.22万t,种植面积及产量均位居世界第一。油菜籽作为主要的植物油原料,含有丰富的油酸,具有较高的营养价值,在我国食用油供给安全中具有重要的地位和影响[2]。同时油菜具有作为生物柴油的优势,被认为是生物柴油的理想原料[3]。油菜收获具有季节性强、劳动强度大、劳动效率低、总损失大的特点,特别是长江流域主产区的收获季处于梅雨季节,油菜籽容易变质霉烂,因此机械收获十分必要。然而,油菜自身的生长状况和特性,如植株较高,茎秆粗壮坚韧,分枝密布交叉,相互牵扯分禾困难,角果容易开裂落粒,导致机械化收获难度大[4-5]。
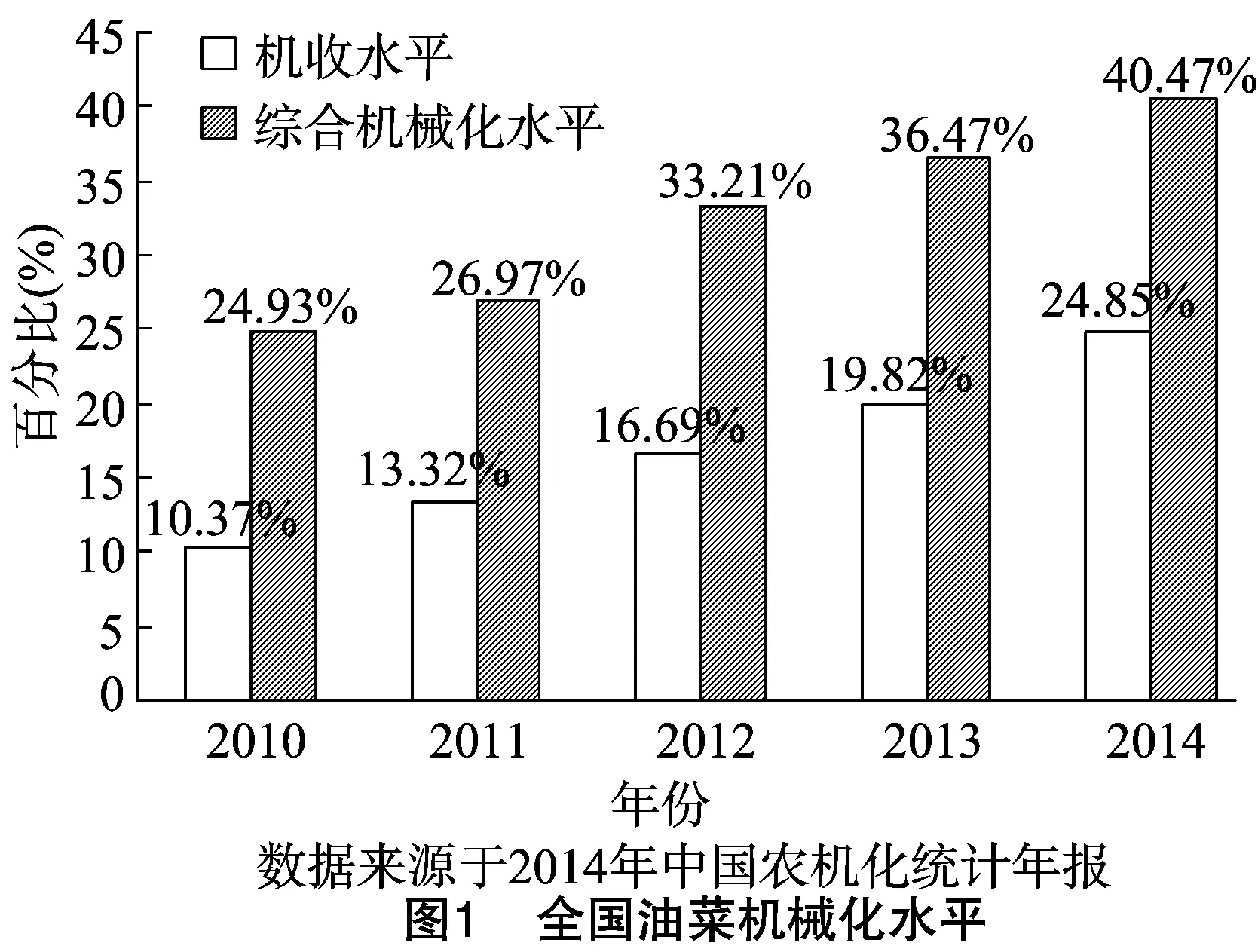
我国油菜机械化起步较晚,近年来以每年3%~5%水平增加,但总体水平仍然很低[6]。由图1可知,2014年全国油菜综合机械化水平为40.47%,但机收水平仅为24.85%。目前生产上使用的多种型号油菜联合收割机是在稻麦联合收割机的基础上改装而成的兼用型收割机[7],它们适应性差,收割损失率偏高[4],在低速工况下可以正常工作,但当进行高速(大于3 km/h)收割作业时,割台搅龙容易出现茎秆堆积现象[8]、拨禾轮出现茎秆缠绕问题[9],从而影响油菜收割作业的流畅性和工作效率,同时也增加了割台损失。因此,本文对国内外学者关于油菜割台的研究进行分析,并提出问题和建议,以期为油菜收获割台的研究和设计提供参考。
1 研究现状
割台是联合收割机重要的工作部件之一,位于收割机前方,主要完成对作物的切割工作并将割下的作物连续输送给中间输送器最终到达脱粒装置。目前我国油菜联合收割机的主要品牌有湖州星光、江苏沃得、福田雷沃、湖州思达、浙江柳林、中机南方等以及国外机型如美国的约翰迪尔、日本的久保田、德国的黑格等[5]。这些机型的割台基本都是全喂入卧式割台,可通过更换一些工作部件(切割器、拨禾轮和螺旋推运器等)来实现稻麦兼收。
1.1 切割系统的相关研究
目前对于油菜联合收割机切割系统的研究主要分为对割刀的研究以及对油菜茎秆物理特性的研究2个部分。
1.1.1 切割器研究 割台上切割器的作用主要是将直立的作物割下,由于油菜植株高大,分枝密布交叉且相互牵扯,因此油菜联合收割机上除了有通用稻麦收割机上的往复式切割器外,在割台一侧还装有竖直的分行切割器,以切开相互缠绕的油菜分枝,从而减少分禾落粒损失[10]。
董建东等就竖侧切割器的数量、类型、水平距离、高度等展开了相关研究设计[11]。由于两边安装侧割刀的造价高、传动路线复杂、恢复稻麦收割状态较困难,目前大多数油菜收割机只在一边设置侧割刀,割刀类型为双动刀、单刀距行程型(s=t,s为切割行程,t为动刀片间距)往复式切割器。竖侧切割器与主切割器的水平距离须考虑扰动区,当前伸量y1的取值接近油菜蓬面半径R时,扰动最小,设计取300 mm;而侧切割高度则须考虑油菜植株高度与割茬高度(图2)。刀片的选择须考虑油菜切割时的横向弯斜量和振动,在满足切割要求的情况下,应尽可能减小刀片尺寸、质量和间距,在设计实例中采用了整体小刀片。传动方式采用直接传动,以小型齿轮液压马达为动力通过曲柄连杆结构带动割刀作往复运动。而切割频率尚无明确规定,由实践经验选定的切割频率为315~510 r/min。
徐立章等设计了4LYB1-2.0型油菜联合收获机的主要部件,由于油菜分枝较细,为减小割台质量,简化传动,同样采用液压马达为分禾切割器提供动力,割刀采用光刃小刀,为确定切割器切割频率和行程,采用Matlab绘制切割图,通过分析机器速度、曲轴转速和空白区的关系得到,液压马达转速为700 r/min时较好[12]。
吴明亮等为降低油菜切割损失,减小油菜联合收割机割台切割力,针对油菜茎秆切割力的主要影响因素(切割方式、茎秆切割位置、切割刀片形式以及切割速度等)在试验台上进行测试试验,认为最优组合是切割刀片为锯齿型刀片,切割方式为滑切,切割位置为离地400 mm,切割速度为 200 m/s[13]。
也有学者考虑到往复式切割器的惯性冲击和振动较大,影响机器使用寿命和作业质量,对切割器进行运动学、动力学分析。王健康等为降低振动造成的割台损失,对油菜联合收割机上的往复式切割器传动机构进行运动学、动力学分析,通过建立机构模型来分析各主要构件的运动加速度,得到机构各运动副之间的约束方程,对方程求解得到构件惯性力表达式,并在此基础上分析传动机构惯性冲击力与各影响因素之间的关系[14]。李青林等对改装而成的4LYZ-2型油菜联合收获机割刀驱动机构进行仿真,通过ADAMS软件计算横、竖割刀对割台框架的作用力,为油菜联合收获机机构和结构优化提供依据,结果表明,横、竖割刀对割台框架的作用力均为简谐载荷,其中横割刀载荷大小为3 200 N,竖割刀载荷大小为2 673 N[15]。
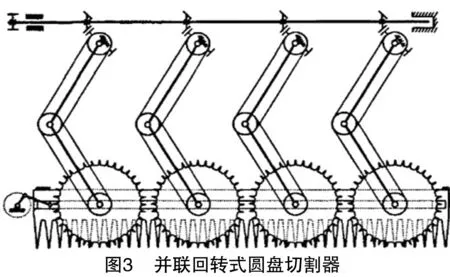
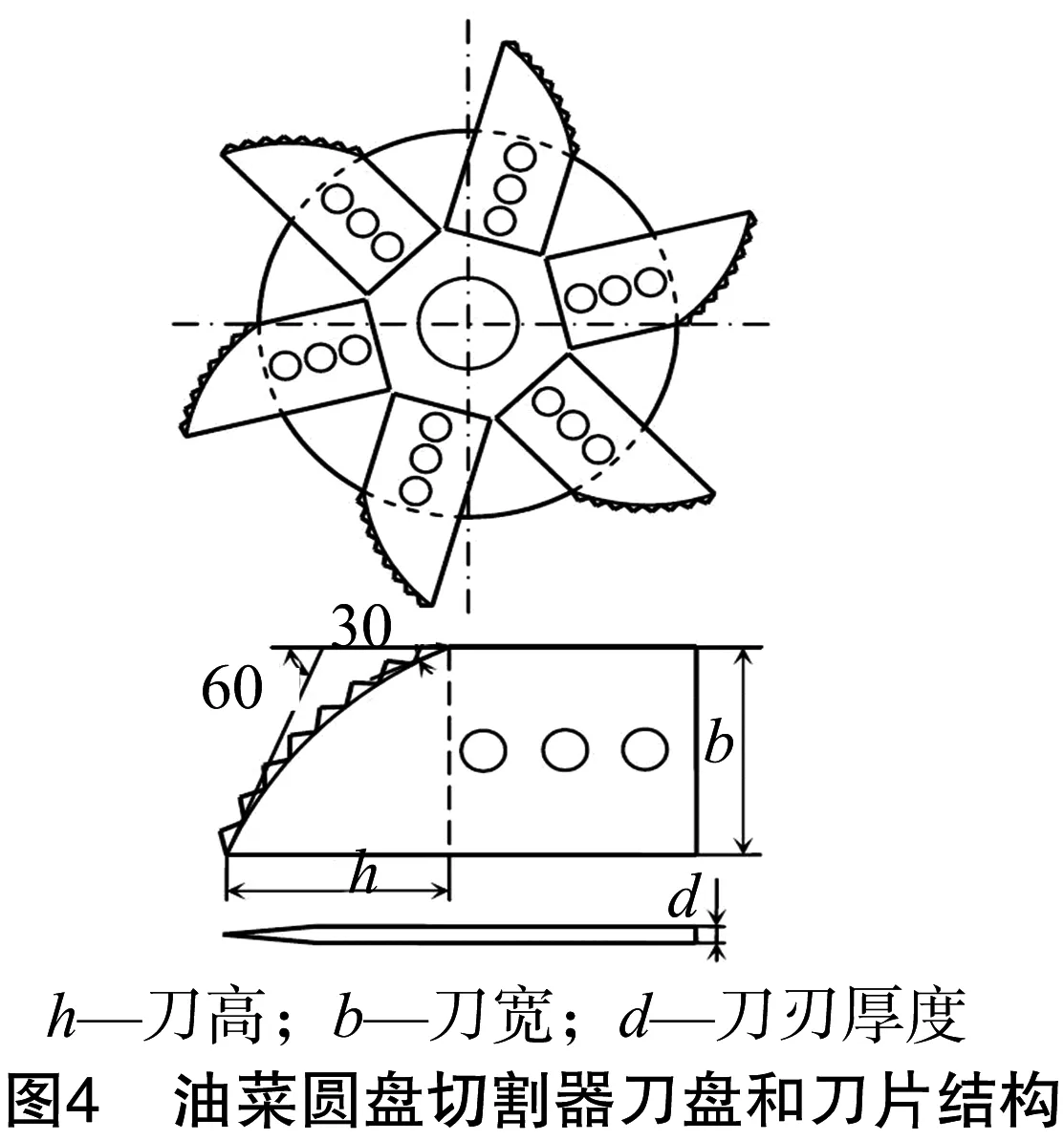
除常见的往复式切割器外,部分研究人员尝试采用圆盘式切割器进行收割。传统割刀在低速收割过程中振动落粒较多,为此张居敏等针对当前油菜割刀的原理性缺陷提出一种全新改进方案,提出并联回转式圆盘切割器(图3),该切割器的切割频率比往复式切割器高2~3个数量级[16]。李仲恺等为降低割台落粒损失也设计了一种适应油菜收获的偏心圆弧锯齿刃圆盘切割器(图4),该切割器惯性力易平衡、振动小,偏心圆弧刀刃滑切角向外逐渐增大,切割时具有缓冲作用,锯齿切割阻力功耗低,通过切割单因素及多因素试验,包括切割转速、切割位置和切割倾角等因素,获得油菜圆盘式切割器的最优工作组合,结果表明,落粒现象得到改善[17]。
1.1.2 油菜茎秆物理特性的研究 切割不仅与割刀关系紧密,油菜茎秆物理特性对切割系统也有重要影响。
罗海峰等对适应机械化收获的田间油菜植株特性进行了研究,从农机农艺相结合的角度出发,对直播油菜田间植株茎秆物理特性包括茎秆直径、分枝离地高度、分枝数、茎秆总高度和油菜角果拉断力进行测试研究,获得田间植株特性基础数据和表现特征,结果表明,适宜的种植密度有利于机械化收获作业[18]。
任述光等利用其改进设计的三点弯曲试验方法测定油菜茎秆的弹性模量,并利用霍尔杨氏模量测定仪和读数显微镜对霍尔传感器进行标定,通过测量茎秆弯曲时的砝码质量和测定仪标线位移,利用最小二乘法进行线性拟合,得到拟合曲线斜率,结合茎秆弯曲力学模型中挠度与弹性模量的关系式测定弹性模量。结果表明,成熟期油菜茎秆弹性模量随含水率的降低而增加,湿茎秆弹性模量约为(169±3) MPa,干茎秆弹性模量约为(186±3) MPa[19],该结果对油菜茎秆切割研究具有重要参考价值。
马征等则采用TA-XT2i型物性测定仪对油菜茎秆整体、茎秆内海绵体以及茎秆外壳进行弹性力学特性试验并对试验结果进行拟合对比分析,结果发现,油菜茎秆整体和茎秆外壳的受力随着加载深度的增加而增大,有明显的弹性特征;但茎秆内的海绵体由于结构松散而在加载深度超过2 mm后出现应力屈服现象[20]。
刘兆朋等对成熟期油菜茎秆力学特性进行试验研究,分别测定成熟期茎秆弹性模量、剪切弹性模量、剪切力和含水率,结果表明,油菜茎秆弹性模量和剪切弹性模量随茎秆含水率的减小而增大,油菜主茎秆剪切力随含水率的下降先增大后减小,为高效、低耗油菜联合收割机切割装置的设计提供理论依据[21]。
罗海峰等为更好地了解油菜植株本身的田间生长特性,对成熟期油菜茎秆物理模型及茎秆的生长变化进行试验研究,分析茎秆直径随高度和分枝的变化规律,包括不同部位直径分布规律和主茎秆直径变化规律,为油菜机械化收获等提供理论依据[22]。
黄震等为降低机械化收获过程中油菜籽粒损失率和含杂率,研究收获前油菜主茎秆与各分枝、主茎秆与角果、各分枝与角果之间连接应力随时间和位置的变化规律,结果表明,主茎秆与各分枝、主茎秆与角果、各分枝与角果的连接应力在植株生长方向上均变小;在油菜成熟期,油菜主茎秆与各分枝、主茎秆与角果、各分枝与角果之间的连接应力随时间的延长无变化或变化较小,所以在油菜成熟期适当提前收获可以减少因植株干枯造成的损失[23]。
廖宜涛等采用RGT-10电脑伺服材料试验系统,以收获期的华杂10号为对象,试验研究油菜茎秆的压缩、剪切、弯曲特征,得出茎秆压缩、剪切、弯曲的载荷-位移曲线,结果表明,油菜茎秆是非均质、非线性、各向异性材料,在破坏过程中无屈服现象;同时油菜茎秆的主要力学特性体现在茎秆外壁上,因此在研究中可将其简化为空心管模型[24],研究结果为油菜机械化收割提供理论依据和基础技术参数。
1.2 拨禾轮的相关研究
拨禾轮的作用是在收获时扶持和扶起倒伏作物,将作物拨向切割器进行支撑切割,同时将割下的作物拨向螺旋推运器,保证作物喂入。结合油菜自身植株高大、枝条缠绕、成熟易炸角的生长特征,对拨禾轮的研究主要集中在拨禾轮仿真及参数优化等方面。
许虎泉等从拨禾轮的转速、拨禾轮中心的水平、垂直位置以及拨禾齿的型式、数量等方面对新型油菜收割机拨禾轮主参数进行了优化设计[25]。
董月亮等则通过改变拨禾轮转速、收割机前进速度、拨禾轮轴相对割刀的位置等对割台损失进行单因素和多因素试验分析,结果表明,收割机前进速度对割台损失的影响极显著,其次是拨禾轮转速,然后采用DPS数据处理系统建立各因素之间的回归方程,求得最佳工作参数和结构参数,即拨禾轮转速为18 r/min、机器前进速度为0.6 m/s、拨禾轮轴相对割刀的垂直距离为1 299 mm[26]。
孟为国等针对某型联合收割机进行拨禾轮分析优化,通过测绘构建三维实体模型,将弹齿工作参数设定为前倾15°、垂直、后倾15°,然后分别进行运动仿真分析并获取拨禾轮的轨迹曲线,分析比对曲线,研究收割时拨禾轮对麦类作物的收割影响。最终尺寸设定拨禾轮半径R=605 mm时,相邻拨板弹齿间的摆环空白区bk值不明显,对作物拨禾作用点下降,从而降低收割损失率[27]。
杨树川等进行了拨禾轮运动轨迹的计算机仿真,分别借助不同仿真软件Matlab、LabVIEW和AMEsim根据拨禾轮的数学模型和物理模型,仿真拨禾轮的运动轨迹,对于所述的7种仿真方法,当改变拨禾轮的结构及工作参数时,均可实现对应条件下拨禾轮运动轨迹的仿真[28]。
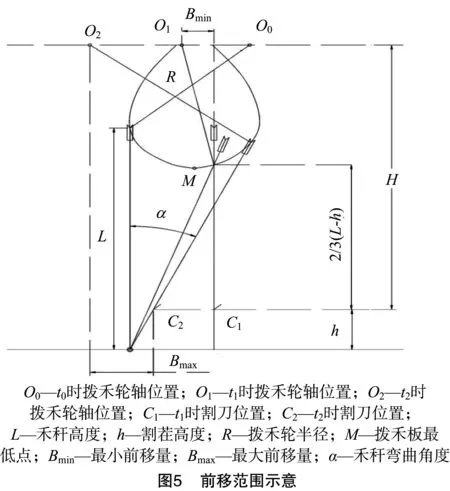
祁兵等通过基于Adams的联合收割机拨禾轮前移范围的仿真研究,建立拨禾轮前移范围数学模型,提出了最小前移量概念,通过细化分析约束条件寻找在不发生回弹且同时满足垂直插入、稳定推送的情况下拨禾轮的前移范围(图5)。利用Adams仿真软件建立虚拟样机,综合考虑垂直插入禾丛、稳定推送、回弹极限条件等对拨禾轮前移范围进行仿真研究,得出在不同轮速比下同时满足约束条件的拨禾轮前移范围[29]。
任文涛等对拨禾轮工作中的作物回弹进行模拟分析,在2个基本假设的前提下建立数学模型,分析作物刚要发生回弹时,作物、拨禾轮和割刀间的位置关系,采用Excel软件分析得出拨禾轮常用的工作参数,并利用计算机模拟分析速比变化、割茬高度对拨禾轮前移量和作用范围的影响,得出将拨禾轮适当前移可增加其扶禾能力但不应超过前移量极限值的结论[30]。
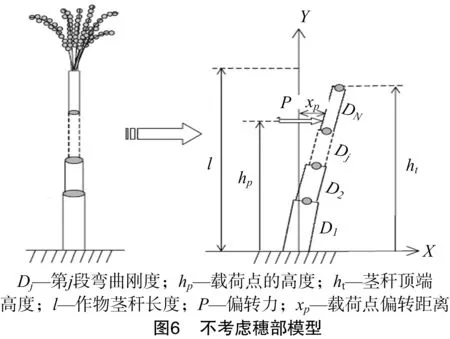
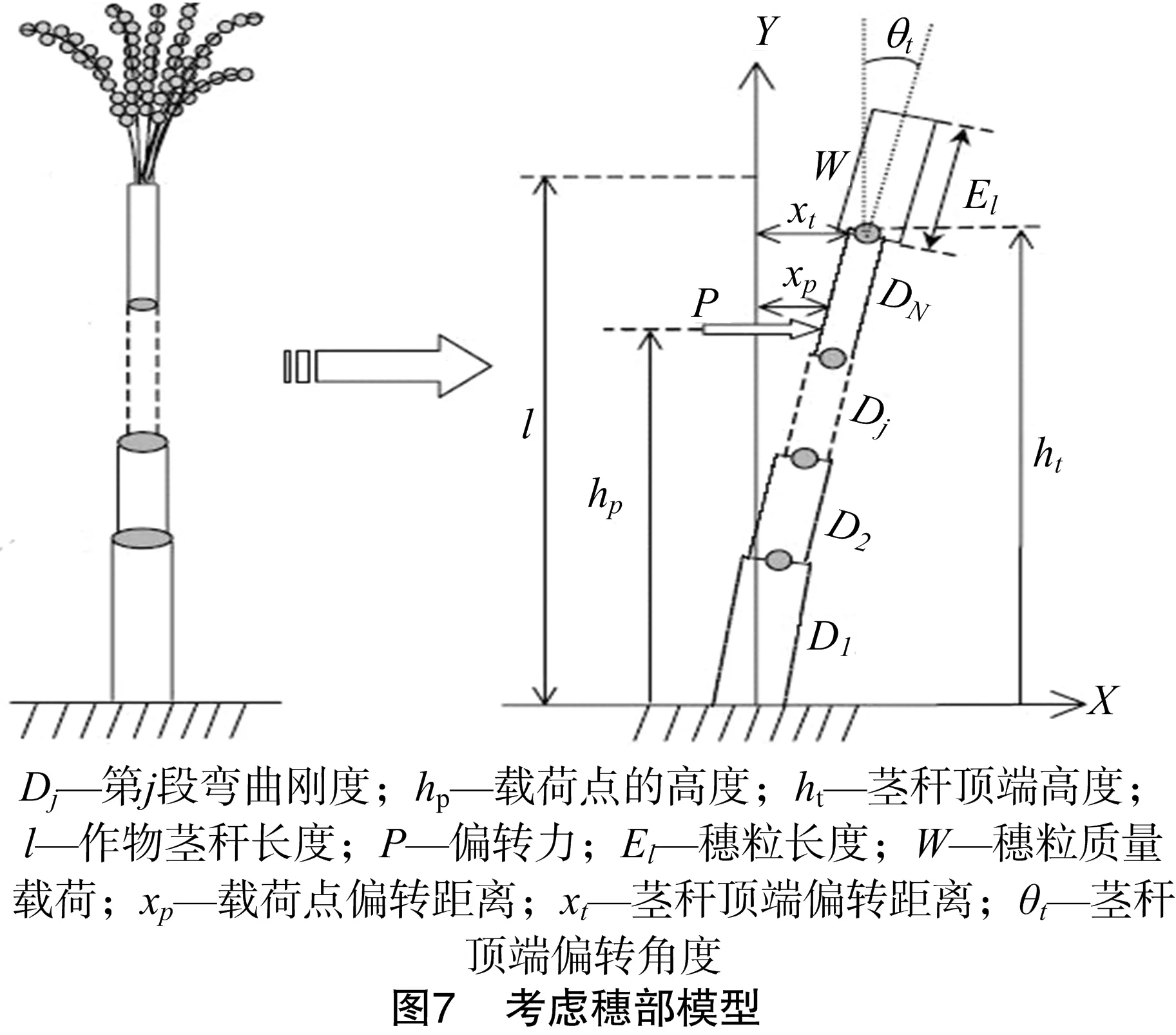
国外学者在此方面主要研究了拨禾轮和作物茎秆的相互作用关系及运动受力情况。Hirai等对联合收割机拨禾轮与作物茎秆的相互机械作用进行研究,对基于弹性梁弯曲理论建立的2种作物力学模型进行分析(图6、图7),区别是在第2种模型中,考虑作物穗部质量,并采用试验方法研究拨禾轮运动力学模型,结果表明,由于穗粒质量和作用于作物茎秆垂直分力的屈曲载荷都可增加拨禾轮在收集过程的挠曲,考虑作物穗部的模型对研究拨禾轮与作物相互作用是有用的,并且该模型考虑了垂直分力的影响,可增加挠曲力的分析精度;此外,基于上述结果进行拨禾轮收集作物茎秆的姿态分析[31]。
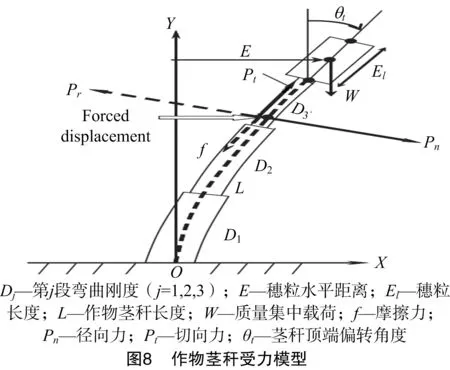
Hirai等同时分析了联合收割机拨禾轮运动的准静态茎秆弯曲动态响应,通过试验测量联合收割机拨禾轮在收集水稻和小麦时茎秆的水平和垂直反力,试验在5种不同的加载速度下进行,研究加载速度对反作用力的影响(图8)。根据收集过程中加载点的加速度测试结果可知,水平反力正峰值和垂直反力负峰值的位置与水平加速度负峰值和垂直加速度正峰值位置分别一致。结果表明,高加载速度下的峰值是由作物茎秆惯性力的影响而形成的。此外,可根据仿真结果和测量值之间的不同研究高加载速度下的仿真结果误差,加速度力的方向与拨禾轮收集运动过程中的加载方向一致,显示出加速运动中力的误差[32]。
1.3 螺旋推运器(搅龙)的相关研究
作物在割台上被拨禾轮拨向搅龙后,搅龙将被切割下来的作物均匀地送向喂入口,在伸缩扒指的作用下被推向中间输送槽。搅龙的常见问题主要有作物喂入不连续、推运器堵塞以及缠绕等,其中喂入不连续可能是由机器前进速度过快、搅龙伸缩扒指伸出量不够或拨禾轮离搅龙位置太远等造成的;堵塞可能是由推运器叶片与割台底板间隙不合适、作物喂入量过大或拨禾轮前后位置不合适等造成的[33]。喂入不连续、堵塞问题在稻麦收割、大豆收割过程中也常出现,王洪群等根据经验分析原因,给出了解决办法[34-35]。
余克强等则基于Matlab对谷物联合收割机喂入搅龙机构进行仿真理论分析,在收割机喂入搅龙结构基础上,对其结构简化,不考虑叶片运动及机器运动方向、速度,建立数学模型,然后运用Matlab软件对其进行运动学分析和仿真,得出喂入搅龙各个参数值工作时的运动变化曲线,可为机构优化和实际生产提供参考[36]。
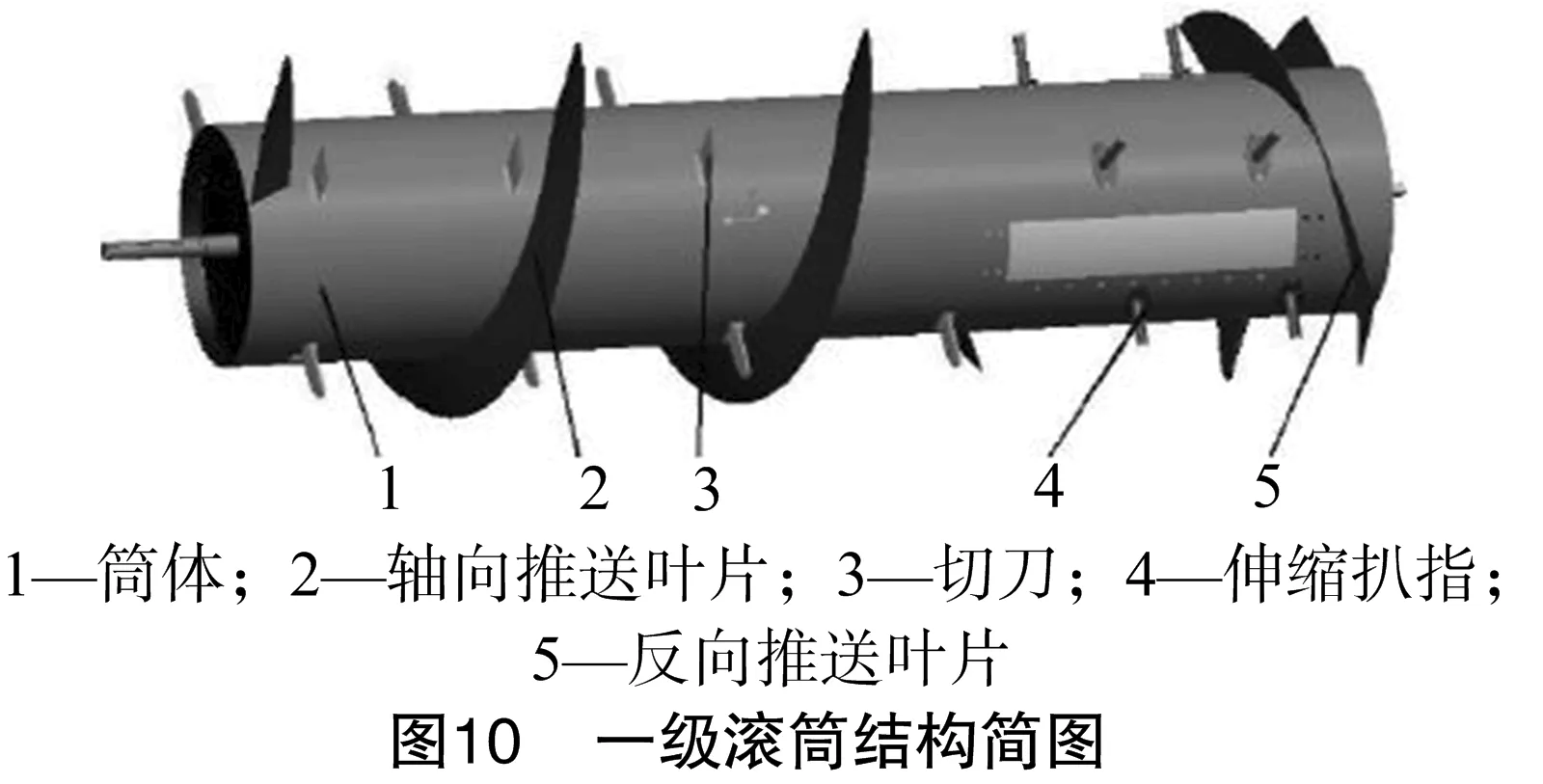
李海同等在其设计的油菜联合收获机分体组合式割台上采用复式推运器,该复式推运器由一级滚筒、导向顶盖、凹板筛、提升搅龙、水平输送搅龙等部件组成,结构如图9所示;油菜茎秆在拨禾轮作用下进入复式推运器,推运器将茎秆输送至纵轴流脱粒装置,输送过程中一级滚筒(图10)可以实现对茎秆初步切断分离,掉落在割台上的籽粒和轻杂物则被水平输送搅龙收集并送入清选装置;田间试验结果表明,设计的分体式组合割台可实现茎秆切断功能且效果显著,水平输送搅龙可收集掉落籽粒,且滚筒不会发生堵塞现象,整机工作性能良好[9]。

1.4 关于割台的其他研究
对于割台除对上述切割系统、拨禾轮、螺旋推运器等三大主要部件的研究之外,也有学者从割台整体及其他方面展开了研究。
查跃华针对油菜茎秆的特点,设计了一种新型油菜联合收割机伸缩式割台,主要调整主割刀与拨禾轮、螺旋输送器的相对水平距离;采用电动或液压驱动的小刀片竖侧切割装置;通过调整拨禾轮的位置和转速来适应油菜的株高,减少碰撞损失。收割油菜时,主切割装置前伸到固定座,摆臂调节到前伸状态,装上竖侧切割器,调节拨禾轮位置、转速;收割麦稻时,主切割装置的摆臂调整到后缩状态,拆下竖侧切割器,拨禾轮位置、转速调节到收割稻麦状态,从而使新型油菜联合收割机能兼收稻麦[37]。
林连华等在研究和开发4LZ-2.5型自走式油菜联合收获机主要工作部件的过程中,优化设计了一种低损失油菜割台,增加了斜滑板、后挡板、拨禾轮驱动电机和前后高低调整油缸,并对割台各级传动比进行计算,试验结果良好[38]。
陈翠英等设计了谷物联合收获机油菜收获割台,主要是在未割边加装竖直切割器和改变拨禾轮运动参数使其能进行油菜收获作业[39]。
孟为国等设计了联合收割机割台高度自动控制系统,利用传感器测得割台与路面之间的距离,采用可编程逻辑器件(programmable logic device,简称PLD)工作原理编辑逻辑程序控制割台自动升降[40]。
李青林等分析了常柴4LY-Z油菜联合收割机改装前后在割刀驱动机构运动时产生载荷作用下的割台框架谐响应,运用ANSYS分别对改装前和改装后的割台框架进行分析,由结果可以看出,改装后竖割刀的增加加剧了割台框架的振动,结构的改变对割台的振动影响不大,主要是竖割刀驱动机构的增加产生的影响[41]。
李青林等对4LYZ-2油菜收获机割台框架进行有限元模态分析,用Solidworks建立割台框架三维模型,并用ANSYS软件进行网格划分得到有限元模型,然后进行模态分析,在振型分析中指出割台框架的薄弱环节,为割台的改进设计提供了理论依据[42]。
李耀明等为降低联合收获机工作时的共振影响,对联合收割机割台机架进行结构参数优化,利用UG软件对稻麦联合收获机割台机架进行建模,求出割台机架的模态频率和振型并对其进行模态试验验证及理论分析[43]。
罗海峰等为减少油菜在机械化收获时的掉粒损失,以碧浪-200Y型油菜联合收割机割台为研究对象,设计了撮箕形茎秆分离装置、侧置籽粒收集装置、栅格式茎秆分离装置、拨杆主动型茎秆分离装置等4种割台茎秆分离装置;田间试验结果表明,拨杆主动型装置掉粒损失最小,且无反弹现象,田间掉粒损失为3.2%,效果较理想[44]。
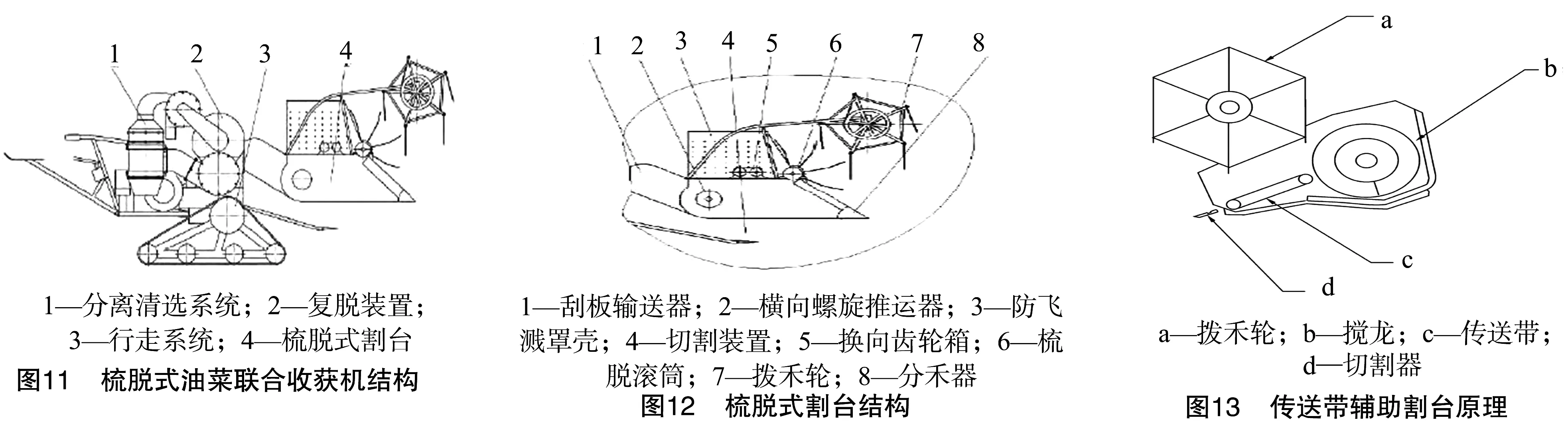
冀牧野等针对油菜植株的生物学特性,设计了一种油菜联合收获机梳脱式割台(图11、图12),通过建立梳脱滚筒、拨禾轮等主要部件的运动学模型,确定拨禾轮、梳脱滚筒、切割装置和防飞溅罩壳的结构参数、运动参数及合理参数组合,开展梳脱滚筒运动仿真分析。仿真和田间试验结果表明,梳脱式割台可以实现油菜收获的拨禾、梳脱、抛送、切割等功能[45]。
国外方面,Lopes等同样对联合收割机割台高度控制系统进行了研究,主要采用线性二次高斯控制(linear quadratic Gaussian,简称LQG)和环传递回复(loop transfer recovery,简称LTR)方法进行控制系统设计[46]。
Asoodar等指出,伊朗油菜种植已经在其国内各地发展起来,然而在整地、种植和收获过程中仍然存在一些问题,须要采用新技术进行机械化收获,因此谷物联合收获机生产公司须生产一些安装在割台上的扩充配件。通过试验研究1种割台和2种割台扩充配件对油菜收获损失的影响,从而确定损失量以及造成损失的原因,试验涉及1种常见割台以及伊朗制造的采用机械侧刀切割器的Hamed割台扩充配件、采用液压侧刀切割器的Bizo割台扩充配件,试验结果表明,随着割台运禾螺杆与切割器间距离的加大,割台扩充配件能降低割台油菜落粒损失量,并且使用液压系统替代机械系统、使用双层切割器替代单层刀杆都有助于降低损失量[47]。
Hobson等提出,油菜成熟后角果易炸裂造成籽粒损失,收获时机械会对产量造成影响,籽粒损失量甚至常达产量的25%,且掉落籽粒也会在后茬作物中生长成为杂草。为此他们进行试验去鉴别损失原因,然后设计了适用于联合收割机的2种不同割台,以减少籽粒损失,其中一种是标准割台,一种是在切割器后方设置传送带辅助作物流入搅龙(图13)。结果表明,2种割台损失有显著差异,侧刀损失是相同的,但由于割台宽度不同,改装割台和标准割台的损失转化量分别为18.4、34.6 kg/hm2,同时体现宽割台对于减少落粒损失的优势。除去自然脱落损失和侧割刀损失,改装割台的收割落粒损失为59 kg/hm2,而标准割台为104 kg/hm2;其中改装割台切割器的落粒损失为27 kg/hm2,比标准割台切割器造成的损失减少 1/2,展现了割台切割器与传送带前部配置的效果[48]。
Pari等介绍了意大利农场油菜机械收获损失情况,意大利的油菜种植主要受限于机械收获和天气原因造成的籽粒损失,该研究从成熟到收获的所有阶段考虑,确定有效籽粒损失,对试验机械收获联合收割机配置谷物割台和特殊油菜割台等2种不同割台。结果表明,这种特殊油菜割台可以减少籽粒损失,其损失量低于文献中报道的范围,并且可以精密测定损失较高的地方[49]。
Zareei等为减少收集损失,使用克拉斯510确定联合收割机割台部件的最佳调整位置以及影响收割机割台损失的可调节因素包括前进速度、拨禾轮速度、割茬高度、拨禾轮搂齿与割刀之间的水平距离及垂直距离等,试验采用田口方法设计和分析,使用L18正交矩阵,总共实施54组。试验结果表明,最佳组合参数为前进速度2.5 km/h,拨禾轮速度3 km/h,割茬高度30 cm,割刀水平距离10 cm,割刀垂直距离5 cm,此时组合得到最低收集损失。此外,前进速度对收集损失的影响最大,拨禾轮速度、割茬高度、拨禾轮搂齿和割刀水平距离及垂直距离等的影响较小[50]。
2 存在的问题
国内外学者对油菜收割机割台开展了广泛的研究,其研究结果可指导产品的设计和优化,其中对联合收割机割台通用化技术的研究较多,而针对油菜收获特殊性问题的研究还不够深入,仍存在一些亟待解决的问题。
油菜联合收割机技术主要来源于相对成熟的稻麦收割机,继承了稻麦联合收获的路线、原理和机器结构,但油菜和稻麦还是存在一定差异的,其植株高大,易炸角,易造成较高总损失,须要在兼用的基础上,针对油菜收获特性开展特殊部件和参数研究,以寻求新的突破。
设计仍需优化。由传统全喂入式稻麦联合收割机改装而成的油菜联合收割机改变、增加了适应油菜收获的部件,但收获损失仍然很大,分禾效果差,且含杂率较高。由于油菜茎秆高大,在割台上会出现堆积堵塞、缠绕等问题,影响收获作业生产效率,是亟须解决的问题。
油菜收获割台的研发。据测定,油菜割台损失量占收获总损失量的40%,且油菜成熟度越高,割台损失量越大,如何优化割刀、螺旋推运器与拨禾轮之间的配置关系或设计新型割台,减少割台振动,回收落粒损失等都是值得研究的问题。
3 讨论与建议
油菜机械化正处于加速发展的新起点,面临难得的发展机遇和良好环境,随着农业新型经营主体的发展以及经营规模的扩大,对新一代油菜联合收割机在作业适应性、顺畅性和可靠性等方面提出了更高的要求,为此,须要开展更加深入的研究和优化设计。
3.1 优化设计,提高机器适应性
对于机器的结构优化不仅要追求某一方面最佳,而且要在整体上达到最佳;对割台的优化不仅要考虑割台局部,而且要综合考虑机器结构和油菜的自身生长特性及生产管理环节,因此须对收割过程中油菜茎秆在割台上的运动机制进行深入细致的研究,对关键技术进行研发攻关,开发出真正适合油菜收获的机器。
3.2 油菜专用割台部件研发
主要为对专用切割器的研究,设计出减少振动、降低割台损失、提高切割效率、降低能耗的切割系统对于割台整体至关重要,传动机构、刀片形式、切割方式等都是要考虑的因素;可以尝试性增加气力式或机械式的落粒损失回收装置;增加刀片切割等防缠绕部件,防止搅龙茎秆堵塞,提高输送的流畅性。
3.3 新技术方法的应用
随着现代设计方法、理论计算方法的不断发展及计算机技术、虚拟仿真分析技术的广泛应用,机器开发设计拥有了更好的条件,从而可以提高设计的针对性和有效性,缩短设计周期并减少试验验证工作量。
3.4 提高智能化水平
从长远来说,可以通过智能化技术提高机器对作物的适应性。如通过对作物状态的检测、判断来自动调整割台的工作参数,进而有效改善收获质量。
参考文献:
[1]吴崇友,易中懿. 我国油菜全程机械化技术路线的选择[J]. 中国农机化,2009(2):3-6.
[2]左青松,黄海东,曹 石,等. 不同收获时期对油菜机械收获损失率及籽粒品质的影响[J]. 作物学报,2014,40(4):650-656.
[3]管伟萍,肖弥彰,王国槐. 油菜作为生物柴油原料的研究进展[J]. 作物研究,2006,20(增刊1):453-455.
[4]李耀明. 我国油菜联合收割机的现状与展望[J]. 农机质量与监督,2005(1):40-42.
[5]黄小毛,宗望远. 油菜联合收获的研究现状及发展趋势[J]. 农业工程,2012,2(1):14-19.
[6]吴崇友,肖圣元,金 梅. 油菜联合收获与分段收获效果比较[J]. 农业工程学报,2014,30(17):10-16.
[7]季宏军,丰 晖. 油菜收割机发展的制约因素及对策[J]. 江苏农机化,2012(4):22-23.
[8]杜 金,兰心敏. 浅析我国油菜联合收割机发展状况[J]. 湖北农机化,2010(3):28-29.
[9]李海同,廖庆喜,李 平,等. 油菜联合收获机分体组合式割台的设计[J]. 华中农业大学学报,2014,33(5):111-116.
[10]金诚谦,吴崇友. 油菜收获技术基础研究现状与展望[J]. 农机化研究,2010,32(1):5-9.
[11]董建东,何增富. 油菜收割机竖侧切割器的研究和设计[J]. 中国农机化,2008(1):69-72.
[12]徐立章,李耀明,马朝兴,等. 4LYB1-2.0型油菜联合收获机主要部件的设计[J]. 农业机械学报,2008,39(8):54-57.
[13]吴明亮,官春云,汤楚宙,等. 油菜茎秆切割力影响因素试验[J]. 农业工程学报,2009,25(6):141-144.
[14]王健康,吴明亮,任述光,等. 往复式切割器传动机构运动动力学分析[J]. 中国农学通报,2011,27(1):190-194.
[15]李青林,戴青玲. 基于ADAMS油菜联合收获机割刀驱动机构的仿真[J]. 农机化研究,2009,31(3):56-58.
[16]张居敏,黄永俊. 油菜联合收割机高速切割器创新设计[J]. 农机化研究,2008(7):143-145.
[17]李仲恺,谢方平,刘 科,等. 油菜收获圆盘式切割器的设计与性能试验[J]. 湖南农业大学学报(自然科学版),2014,40(1):83-88.
[18]罗海峰,汤楚宙,官春云,等. 适应机械化收获的田间油菜植株特性研究[J]. 农业工程学报,2010,26(增刊1):61-66.
[19]任述光,吴明亮,谢方平,等. 油菜茎秆弹性模量的测定[J]. 实验室研究与探索,2015,34(1):38-41.
[20]马 征,李耀明,徐立章. 油菜茎秆弹性力学特性试验研究[J]. 农机化研究,2016(5):187-191.
[21]刘兆朋,谢方平,吴明亮. 成熟期油菜茎秆力学特性试验研究[J]. 农机化研究,2009,31(2):147-149.
[22]罗海峰,吴明亮,翁 伟,等. 成熟期油菜茎秆物理模型试验研究[J]. 湖南农业大学学报(自然科学版),2013,39(1):88-90,93.
[23]黄 震,吴明亮,官春云,等. 油菜茎秆连接力的测定[J]. 湖南农业大学学报(自然科学版),2011,37(6):678-680.
[24]廖宜涛,廖庆喜,舒彩霞,等. 油菜茎秆物理力学特性试验研究[C]//第十二届国际油菜大会论文集. 武汉,2007:172-201.
[25]许虎泉,彭珍凤. 新型油菜收割机拨禾轮主参数的优化设计[J]. 农业装备技术,2007,33(6):58-59.
[26]董月亮,李耀明,徐立章. 油菜联合收割机割台损失影响因素的试验研究[J]. 农机化研究,2008(5):109-112.
[27]孟为国,殷晓军. 某型联合收割机拨禾轮分析优化[J]. 农业开发与装备,2011(6):9-11.
[28]杨树川,杨术明,佘永卫. 拨禾轮运动轨迹的计算机仿真[J]. 农机化研究,2010,32(12):141-145.
[29]祁 兵,杨晓京,吕鹏翔. 基于Adams的联合收割机拨禾轮前移范围的仿真研究[J]. 农机化研究,2011,33(3):70-72,80.
[30]任文涛,王洪来,崔红光,等. 拨禾轮工作中作物回弹的模拟分析[J]. 沈阳农业大学学报,2003,34(2):121-123.
[31]Hirai Y,Inoue E,Mori K,et al. PM-Power and machinery:investigation of mechanical interaction between a combine harvester reel and crop stalks[J]. Biosystems Engineering,2002,83(3):307-317.
[32]Hirai Y,Inoue E,Mori K. Application of a quasi-static stalk bending analysis to the dynamic response of rice and wheat stalks gathered by a combine harvester reel[J]. Biosystems Engineering,2004,88(3):281-294.
[33]高 潮,龚文军. 联合收割机割台故障及处理[J]. 湖南农机,2008(8):30-31.
[34]王洪群. 提高小型联合收割机搅龙输送均匀性[J]. 农村机械化,1994(3):21.
[35]张国彪. 防止收割机螺旋推运器堵塞[J]. 农业机械,1986(4):17.
[36]余克强,成永三,杨 泉,等. 基于MATLAB的谷物联合收割机喂入搅龙机构的运动学分析和仿真[C]//中国农业工程学会2011年学术年会论文集. 重庆,2011.
[37]查跃华. 新型油菜联合收割机割台的研究[J]. 农业装备技术,2007,33(6):19-20.
[38]林连华,王建强,徐海港,等. 4LZ-2.5型自走式油菜联合收获机的研究与开发[J]. 农业工程,2012,2(6):53-57.
[39]陈翠英,王新忠,何增富. 谷物联合收获机油菜收获割台的设计[J]. 农业机械学报,2003,34(5):54-56,60.
[40]孟为国,金文忻. 联合收割机割台高度自动控制系统设计[J]. 农业机械,2013(31):129-132.
[41]李青林,戴青玲. 基于ANSYS的割台框架谐响应分析[J]. 农机化研究,2009,31(10):28-30,34.
[42]李青林,陈翠英,马成禛. 4LYZ-2油菜收获机割台框架有限元模态分析[J]. 农业机械学报,2005,36(1):54-56,60.
[43]李耀明,李有为,徐立章,等. 联合收获机割台机架结构参数优化[J]. 农业工程学报,2014,30(18):30-37.
[44]罗海峰,汤楚宙,官春云,等. 油菜机收割台茎秆分离装置设计与试验[J]. 湖南农业大学学报(自然科学版),2012,38(5):548-550.
[45]冀牧野,廖庆喜,李海同,等. 油菜联合收获机梳脱式割台设计[J]. 华中农业大学学报,2016,35(5):117-124.
[46]Lopes G T,Magalhaes P S G,Nóbrega E G O. Optimal header height control system for combine harvesters[J]. Biosystems Engineering,2002,81(3):261-272.
[47]Asoodar M A,Izadinia Y.收割机前部扩充配件对降低油菜收获损失的作用(摘选)[J]. 农业工程,2012,2(9):79-81.
[48]Hobson R N,Bruce D M. Seed loss when cutting a standing crop of oilseed rape with two types of combine harvester header[J]. Biosystems Engineering,2002,81(3):281-286.
[49]Pari L,Assirelli A,Suardi A,et al. The harvest of oilseed rape (BrassicanapusL.):the effective yield losses at on-farm scale in the Italian area[J]. Biomass and Bioenergy,2012,46(SI):453-458.
[50]Zareei S,Pour S A,Moghaddam M,et al. Optimum setting of combine header for wheat harvesting using Taguchi method[J]. Research on Crops,2012,13(3):1142-1146.
猜你喜欢
江西农业大学学报(2022年3期)2022-07-07
装备制造技术(2021年5期)2021-08-14
中国石油石化(2021年8期)2021-03-30
今日农业(2019年11期)2019-08-15
农业机械学报(2019年4期)2019-04-29
畜牧与饲料科学(2018年5期)2018-06-13
浙江大学学报(工学版)(2016年9期)2016-06-05
时代农机(2015年3期)2015-11-14
土壤与作物(2013年3期)2013-03-11
