无刷直流电机控制系统研究设计
2018-05-07 08:12:42段一品王茂森戴劲松
机械制造与自动化 2018年2期
段一品,王茂森,戴劲松
(南京理工大学 机械工程学院,江苏 南京 210094)
0 引言
无刷直流电机(BLDC)又被称为电子换向电机,相比传统有刷电机,其内部转子由电线绕组改为永磁体,碳刷由电子换向器取代,外部直流电通过电子换向器产生交流电,进而驱动电机[1]。BLDC有许多优点,例如:由于没有电刷的存在,大大降低了噪声,也不会产生电火花,极大程度上减少了电磁干扰。因为转子是永磁体,而不是线圈绕组,所以发热量少,电机内部可以完全密封,可以避免灰尘等外界杂物进入内部,电机寿命更长。无刷直流电机的应用场合广泛,小到电脑硬盘驱动,大到CNC、工业机器人[2]。但其控制方式比有刷电机复杂,其中包括硬件和软件两方面。本文就其控制系统中几个主要硬件模块进行设计说明,并重点研究设计了一种控制器算法,使电机在不同设定速度下均能达到快速响应、运行平稳、超调量小的效果。
1 无刷直流电机控制系统
无刷直流电机控制系统主要可分为:主控制器、驱动器、转子位置传感器和电机本体4大部分。主控制器根据传感器的反馈量,通过脉宽调制技术(PWM)控制电机运行,形成一个闭环回路。控制系统框架如图1所示。
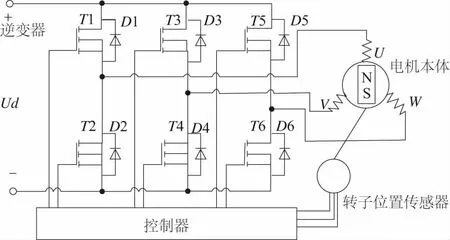
T1-T6—MOSFET; D1-D6—续流二极管图1 控制系统示意图
本控制系统中主控制器采用高性能的数字信号处理器—DSPF2812,主频最高可达150 MHz,内置捕获/正交解码脉冲电路,包含2个事件管理器,每个事件管理器可输出6路互补的PWM波形[3]。其强大的数据处理能力和高运行速度,使之非常适合用于电机控制。传感器采用霍尔位置传感器和一个脉冲数为2 000的编码器,处理器根据位置传感器的输出,控制驱动板上功率管的通断,进而控制电机转向。根据编码器脉冲个数输出,运用M法、T法,或M/T法,DSP可以计算出电机的实时速度,根据计算出的速度值作为控制器的输入值,得到对应占空比的PWM波,然后不断改变速度的大小,达到设定的速度值。电机的额定电压为24 V,额定转速为3 000 r/min,内部定子绕组采用星形连接。
2 无刷直流电机数学模型
数学模型是研究BLDC控制的基础,模型基于以下假设:忽略电枢反应和齿槽效应,定子三相绕组为完全对称的集中绕组,忽略磁路饱和、剩磁、磁滞、涡流等影响[4]。
电压平衡方程:
(1)
式中,Rs为定子的相绕组,vas、vbs、vcs为定子相绕组电压,ia、ib、ic为定子相绕组电流,ea、eb、ec是梯形波反电动势,L为每相绕组自感,M为每两相绕组互感,P为微分算子。由于电机绕组为星形连接,则ia+ib+ic=0,Mib+Mic=-Mia。带入式(1),可得:
(2)
无刷直流电机的转矩方程:
(3)
运动学方程为:
(4)
式(3)、式(4)中,Te是电磁转矩,wm为电机转动的角速度,T1为电机负载,J为转动惯量。
3 驱动器设计
驱动器采用三相全桥模式,考虑到电机额定电压为24 V,最大电流可达11 A,功率管选用IRFS127bF,最高耐压值为200 V,漏极电流可达72 A。电路如图2。
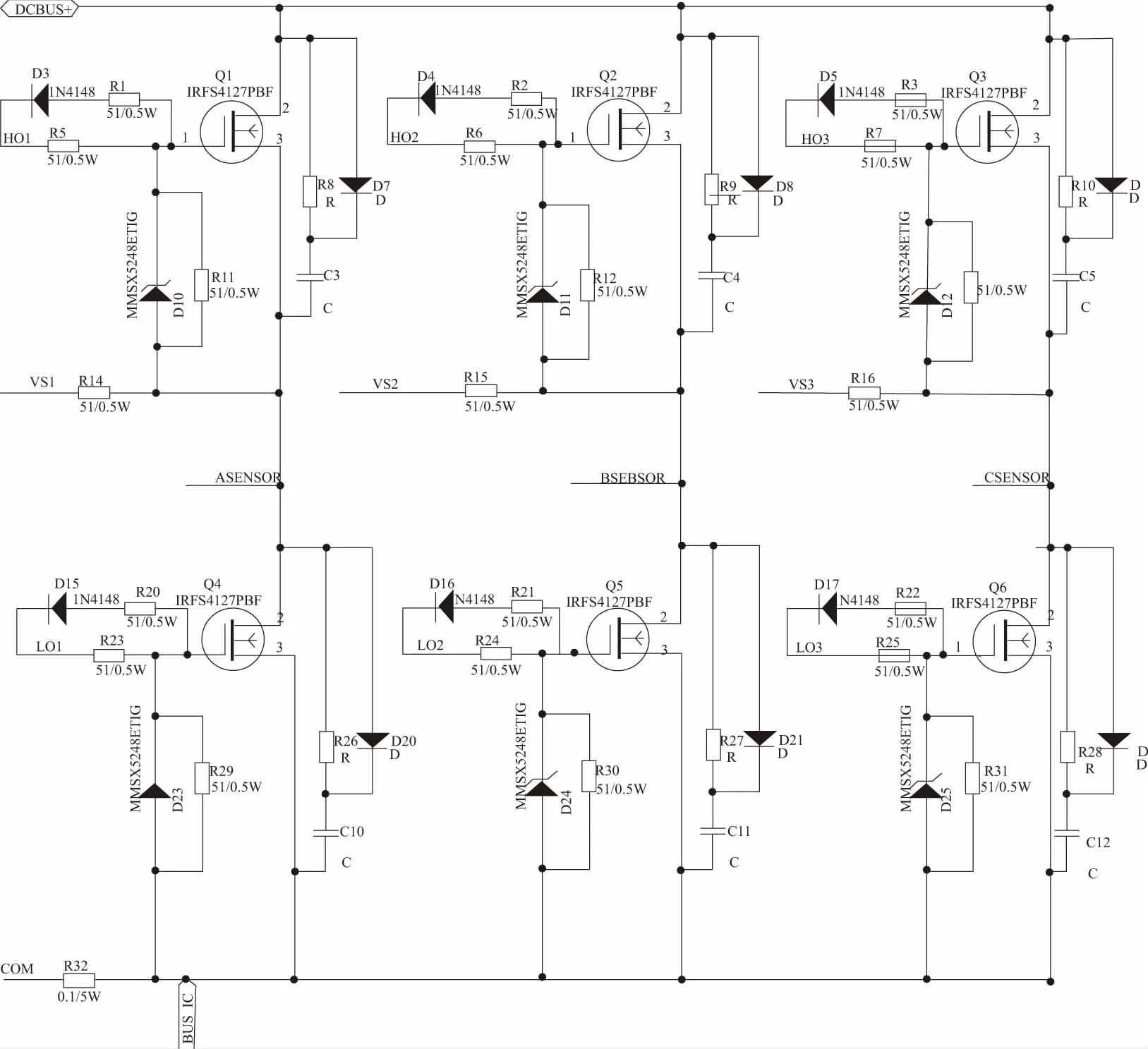
图2 三相全桥驱动电路
从电路图中可以看出,每个功率管旁边都设计了RCD吸收电路。吸收电路中电容的大小可以通过计算得到。由于电容C的充电过程决定了MOS两端的电压的上升率,假设MOS关断瞬间就有电流从电容和二极管回路流过,对电容充电。充电的总时间为MOS管的电流时间tf与电压上升时间tr之和。则可以得到如下公式:C=IDS(tf+tr)/VDS,式中IDS为流过MOS管的峰值电流3.3A,VDS为输入直流电压,tf和tr可通过MOSFET的数据手册查到。缓冲电阻R可通过公式R=ton/3c计算,并且为了确保MOSFET的安全,放电电流IDS应为漏极电流ID的1/4,即IDS=VDS/RS<0.25ID。
DSP输出的PWM波电平信号无法直接驱动功率管的通断,因此需要将电平信号进行放大。本文选用IR2136作为驱动芯片,该芯片输出电压最高可达20 V,内置死区保护功能,并且每个输入端都集成有滤波器,提高了系统的鲁棒性[5]。外围电路如图3。
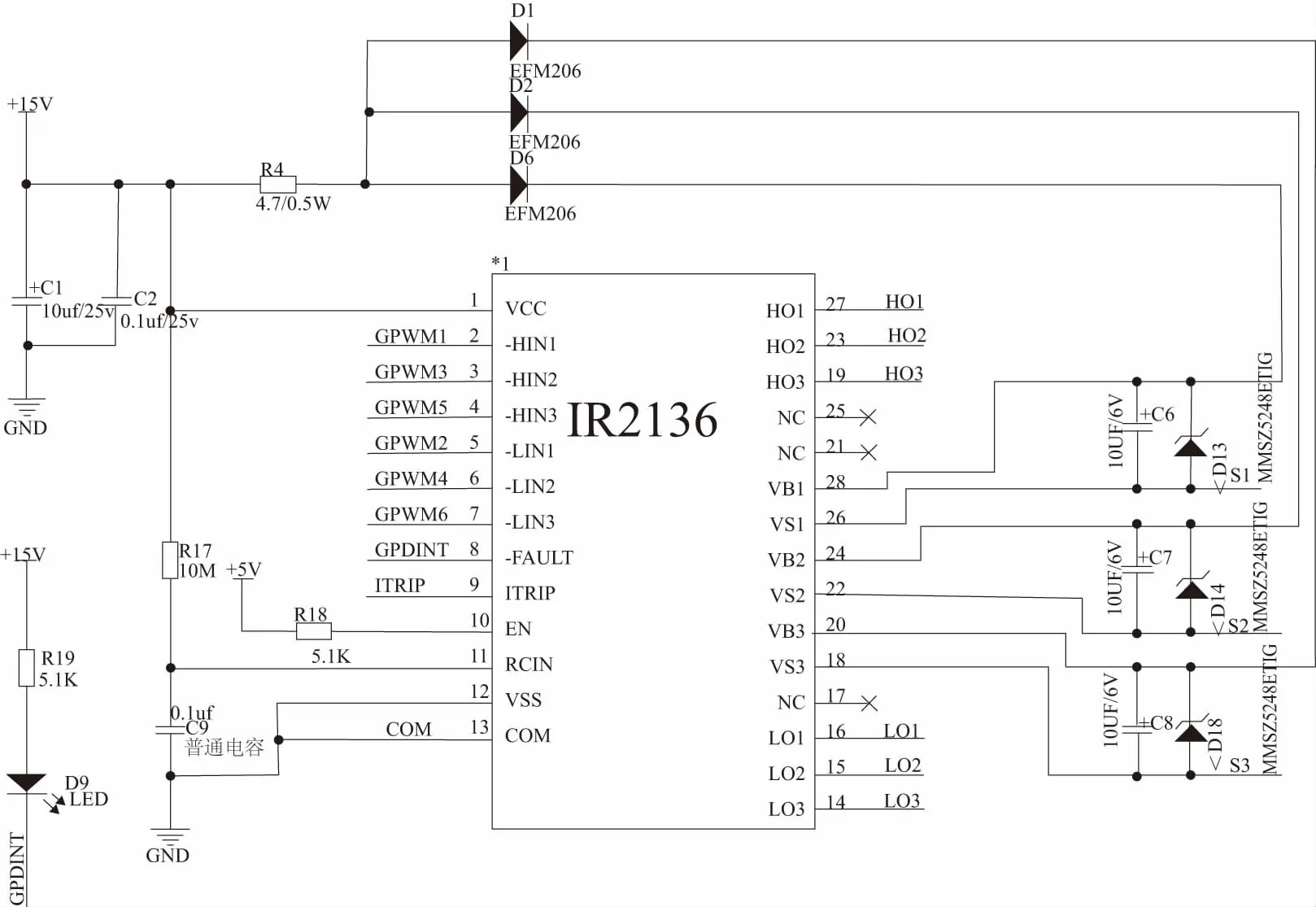
图3 IR2136电路
式中Qg为功率管充分导通时所需要的栅极电荷,VCC为悬浮电源电压,vf为自举二级管的压降,V1为低压侧功率管的压降。MOS管在导通前先对自举电容充电,当电压达到栅极开启电压时,MOS管导通。根据设计要求,自举电容必须能够提供功率管导通时所需的栅极电荷,经过计算和实际调试,本设计中选用该电容大小为10uF。
4 控制器算法设计
电机运行性能主要由控制算法决定,好的控制算法能使电机具有响应快、超调小、运行平稳等特性。本文对控制器算法进行改进。控制器采用增量式PID,增量式PID是指数字控制器的输出只是控制量的增量Δu(k)[6-7]。采用增量式算法时,计算机输出的控制量Δu(k)对应的是本次执行机构位置的增量,而不是对应执行机构的实际位置,因此要求执行机构必须具有对控制量增量的累积功能,才能完成对被控对象的控制操作。执行机构的累积功能可以采用硬件的方法实现,也可以采用软件来实现。如利用算式u(k)=u(k-1)+Δu(k),u(k)程序化来完成。增量式PID控制算式:Δu(k)=kpΔe(k)+kie(k)+kd[Δe(k)-Δe(k-1)],其中Δe(k)=e(k)-e(k-1)。相比位置式PID控制器,增量式算法的优点为:1) 算式中不需要累加。控制增量Δu(k)的确定仅与最近3次的采样值有关,容易通过加权处理获得比较好的控制效果;2) 计算机每次只输出控制增量,即对应执行机构位置的变化量,故机器发生故障时影响范围小、不会严重影响生产过程;3) 手动向自动切换时冲击小。当控制从手动向自动切换时,可以作到无扰动切换。
PID参数的优化很重要,系数kp的作用是加快系统的响应速度,提高系统的调节精度。kp越大,系统的响应速度越快,系统的调节精度越高,但会产生超调现象,kp数值越小,会使系统的响应速度变慢,延长调节时间。ki作用是消除稳态误差,ki越大,系统的静态误差消除越快,但ki过大,在响应过程初期会产生积分饱和现象,引起超调现象,数值过小,静态误差难以消除,影响调节精度。微分系数kd作用是改善系统的动态特性,在响应过程中抑制偏差向任何方向变化。一般将kd的值取0,这样就变成了PI控制器。
用仿真器连接DSP,通过CCS3.3在线调试,将储存的速度变量数组绘制成图,改进前的运行效果如图4。

图4 算法改进前电机运行速度曲线
由图4可以看出电机初始速度设定在1 200r/min,这时,电机响应比较快,运行也比较平稳,运行一段时间后,将参考速度设定为1 800r/min时,电机响应速度缓慢,并且超调量大,静态误差也比较大。其主要问题在于PI参数无法根据设定速度进行实时整定,因此需要对控制器的PI参数整定算法进行改进,改进后的算法步骤如下:
第1步:将电机速度(0~3 000r/min)进行分区间,并根据实际工况要求,分成两端疏,中间密的效果。
第2步:对每个速度区间端点先进行PI参数整定,并以数组的形式再储存在程序中。
第3步:根据实际速度设定值,程序判断其所在的区间,根据已经整定的区间端点的PI参数,运用线性插值法,得到区间内任意点的PI参数的大小。算法如图5所示。

图5 算法示意图
根据PID参数整定方法,对每个区间的参考速度进行参数整定,部分区间的PI参数如表1所示。

表1 PI参数
得到了PI参数表后,即可根据设定速度为X,判断其所在的区间位置,然后根据线性插值法公式(y-y0)/(y1-y0)=(x0-x)/(x0-x1),其中(x0,y0)和(x1,y1)为已经得到的区间端点PI参数值,求得y,即为实时kp、kp值。
5 实验
实验目的是为了检测电机速度动态响应特性。开始时,电机速度设定在1 200r/min,运行一段时间后,改为1 800r/min。DSP根据编码器的输出,将计算出的速度储存在程序的一个速度数组中。CCS3.3通过仿真器可以读取储存在程序数组值,并可以转换成速度曲线图。电机运行性能如图6所示。
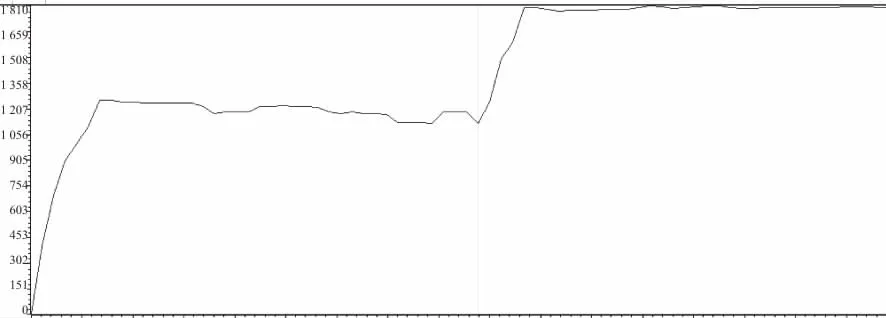
图6 算法改进后电机速度曲线
6 结语
通过对比分析可以发现,在图3中由于PI参数无法根据设定速度实时整定,当参考速度变化时,调节性能不是很理想。当采用了改进后的PI控制器算法,电机的运行特性有了明显的上升,不仅运行平稳,超调量小,而且,可以根据设定速度,实时得到PI系数,其动态响应效果也较好。
参考文献:
[1] 夏长亮. 无刷直流电机控制系统[M]. 北京:科学出版社, 2009.
[2] 刘刚,王志强,房建成. 永磁无刷直流电机控制技术与应用[M]. 北京:机械工业出版社, 2008.
[3] G.MadhusudhanaRao,B.V.SankerRam,B.Smapath Kumar, et al. Speed Control of BLDC Motor Using DSP[J]. International Journal of Engineering Science and Technology,2010(3):14-417.
[4] 许镇琳, 王江, 杨学俊. 无刷直流电机的模型、控制、分析[C]. 北京:全国电气自动化电控系统年会,1990.
[5] 秦文甫, 张昆峰. 基于IR2136的无刷直流电机驱动电路的设计[J]. 电子设计工程, 2012, 20(9):118-120.
[6] 吴强, 韩震宇, 李程. 基于增量式PID算法的无刷直流电机PWM调速研究[J]. 机电工程技术, 2013(3):63-65.
[7] 刘金琨. 先进PID控制MATLAB仿真[M]. 北京:电子工业出版社, 2011.
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
现代信息科技(2022年1期)2022-06-20 09:02:46
现代信息科技(2022年2期)2022-06-15 15:52:45
当代陕西(2022年6期)2022-04-19 12:12:22
中学生数理化·中考版(2019年9期)2019-11-25 09:39:44
电子制作(2017年1期)2017-05-17 03:54:12
电信科学(2016年9期)2016-06-15 20:27:25
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
电子设计工程(2015年16期)2015-02-27 12:07:58