
XPNAV-1卫星实测数据处理与分析
2018-05-07 05:51张大鹏王奕迪
宇航学报 2018年4期
张大鹏, 王奕迪, 姜 坤, 郑 伟
(1. 国防科技大学航天科学与工程学院,长沙 410073;2. 北京跟踪与通信技术研究所,北京 100094)
0 引 言
脉冲星是宇宙中高速自转的中子星。自1967年首颗脉冲星被发现以来,科学家逐渐认识到脉冲星自转周期很稳定,其长期稳定性可媲美目前最好的原子钟[1]。X射线脉冲星辐射有规律的信号,这在天体物理等科学研究和卫星自主导航工程应用上都有广阔的前景[2]。因此,X射线脉冲星信号处理是近年来各国学者的研究热点[3-4]。
二十世纪九十年代以来,国外实施了众多针对脉冲星物理特性研究的空间观测活动。1995年,美国发射了RXTE卫星(Rossi X-ray Timing Explorer)。其主要科学目标是银河系内的致密天体及星系系统的X射线辐射。该卫星已在2012年停止观测,其搭载的正比计数器阵列(PCA)有效面积约6500 cm2,观测能区范围2-60 keV[5],收集了PSR B0531+21、PSR B1509-58和PSR B0540-69等脉冲星的大量数据[6]。此外,美国和欧洲还拥有多颗在轨运行的空间X射线辐射观测卫星:XMM-Newton[7],Chandra[8],Swift[9],INTEGRAL[10],Fermi[11]以及2017年1月安装在国际空间站上的中子星探测器NICER[12]。通过处理和分析这些天文卫星的X射线脉冲星观测数据,国内外学者研究了脉冲星信号轮廓时间演变、脉冲星相位分解能谱特征、计时噪声特性等X射线脉冲星信号的物理特性[13-14],为脉冲星导航技术研究打下了基础[15]。
我国空间X射线脉冲星观测活动起步较晚,长期以来X射线脉冲星探测器技术水平与国外存在较大差距。为紧跟国际前沿航天技术发展,我国正加强研究自己的X射线脉冲星观测卫星。脉冲星导航试验01星(XPNAV-1)是我国第一颗脉冲星导航试验卫星。于2016年11月10日07时42分,在中国酒泉卫星发射中心由长征十一号运载火箭送入预定轨道[16-17]。XPNAV-1卫星的重量仅有200余千克,搭载了准直型微通道板探测器和掠入射聚焦型两种X射线探测器[18]。
本文分析处理了XPNAV-1卫星下传的首批观测数据,通过与国际公开的数据对比,展示了我国聚焦型掠入射脉冲星探测器的科学数据观测性能。
1 XPNAV-1发布数据简介
1.1 科学数据介绍
2017年5月9日,北斗卫星导航系统网站发布了由掠入射聚焦型探测采集的Crab脉冲星首批观测数据,供国内外学者研究交流。数据下载地址为:http://www.beidou.gov.cn/xpnavdata.rar。
首批发布数据文件有两种类型:光子到达时间文件和在轨观测期间的卫星轨道文件。具体文件格式定义如表1所示。
目前公布的XPNAV-1数据仅包含Crab脉冲星观测数据。Crab脉冲星(PSR B0531+21)是相对年轻的中子星,位于蟹状星云的中心。它具有较强的宽能区信号辐射和星云背景辐射,常用于空间X射线观测试验设备的定标信号源。Crab脉冲星计时参数如表2所示。

表1 XPNAV-1卫星发布文件格式Table 1 Formats of the released files observed by XPNAV-1
1. 光子TOA和轨道历元使用的时间系统为UTC,相对于UTC 2008年1月1日0时0分0秒。

表2 Crab脉冲星计时参数[19]Table 2 Timing parameters of Crab
1.2 探测器性能指标
XPNAV-1卫星搭载的掠入射聚焦型探测器是我国自主研发的一种体积小重量轻的星载X射线探测器,具有能量分辨率高、空间噪声抑制能力强的特点。掠入射聚焦型探测器性能参数情况,如表3所示。
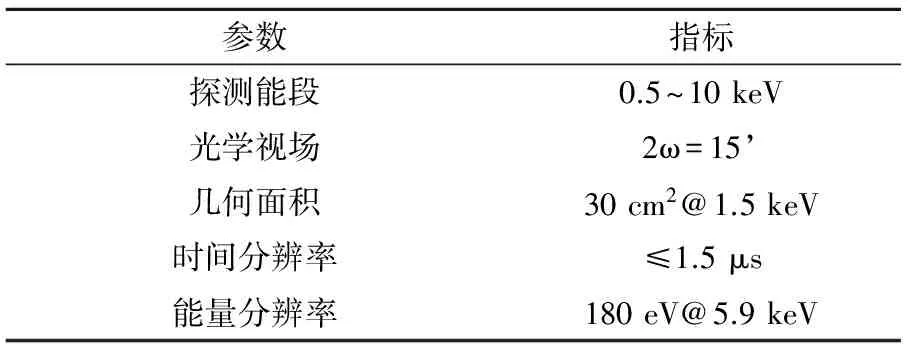
表3 掠入射聚焦型探测器性能参数Table 3 Parameters of the focusing X-ray detector
与传统信号检测不同,脉冲星信号极其微弱,在某一时刻X射线脉冲星探测器只能探测到单光子。一般来说,X射线探测器必须利用遮光膜阻挡可见光等空间干扰。受遮光膜影响,极低能量的X射线无法探测,而脉冲星X射线辐射强度随能量以幂指数趋势减小。因此,针对脉冲星导航应用的掠入射聚焦型探测器被设计为观测0.5~10 keV的软X射线能区。探测器所记录内容的是单光子到达探测器的时刻,被称作光子到达时间。由于X射线单光子能量不同,它们撞击探测器敏感元件所产生的电压响应幅度也不同。根据响应电压的大小还可以测得单光子的能量值,常用单位keV表示。
2 观测数据计数统计
2.1 Crab脉冲星光子流量统计
脉冲星光子流量随时间变化可反映探测器有效面积、特别是空间次级粒子噪声抑制能力等重要性能。
统计XPNAV-1卫星观测的2016年11月17日至2016年12月19日(UTC)的Crab脉冲星观测数据。这期间共观测Crab脉冲星125轨,总观测时间约为366720 s。累计共探测到4438661个光子(含本底噪声),Crab脉冲星平均流量为12.1 ph/s。过滤流量不稳定时段,流量约为14.6 ph/s。每分钟统计一次光子计数率,Crab光子计数率情况,如图1所示。
从图1中可以看出,Crab流量在14.6±5.4 ph/s范围波动,这表明卫星探测器接收到的次级粒子噪声与卫星轨道运动相关,探测器受到了空间粒子的干扰。由于发布数据中没有粒子监测器即时探测数据,探测器粒子噪声抑制指标在这里不再分析。
2.2 Crab脉冲星光子时间间隔分布
为验证实测光子到达事件是否符合理论模型,统计XPNAV-1卫星2016年11月17日至2016年12月19日(UTC)的Crab光子时间间隔数据,如图2所示,其中拟合曲线表达式为:
y=a·e-bΔt
(1)
其中a=573706.82,95%置信区间为(573600, 573800);b=14.3134,95%置信区间为(14.31, 14.32)。拟合曲线的指数b在理论模型中代表光子的计数率。
图2中蓝色星形曲线(见网站电子版)为实测数据统计的曲线,红色(见网站电子版)三角实线为负指数分布拟合曲线。通过两者对比可见观测光子到达时间间隔与负指数分布模型相符合[20]。
3 观测数据光子能量响应分析
3.1 Crab脉冲星未校正原始能谱
通过研究XPNAV-1卫星观测的Crab能谱,可分析掠入射探测器的能量响应特性,该性能指标是探测器的核心性能指标。统计XPNAV-1卫星观测的2016年11月17日至2016年12月19日(UTC)的Crab脉冲星光子的能量数据。建立0.5~7 keV范围的Crab能谱曲线,如图3所示。
图3中的曲线是未经探测器能量响应修正的原始能谱曲线。下一节进一步讨论XPNAV-1卫星掠入射探测器的能量响应性能。
3.2 掠入射聚焦探测器能量响应标定
首先利用XMM-Newton卫星数据对XPNAV-1卫星掠入射探测器能量响应进行标定。XMM-Newton卫星在轨运行期间观测了大量Crab脉冲星数据,同时欧洲航天局(ESA)还公开了它所搭载探测器的校正参数,因此可使用XMM-Newton卫星观测数据作为Crab脉冲星信号流量参考。下载观测ID为“0793980201”的XMM-Newton卫星数据包,该数据包中Crab脉冲星观测数据时段是2017-02-27 16:33:18至2017-02-27 19:19:35,与XPNAV-1卫星发布数据的观测时间段相近。折算Crab脉冲星光子流量所使用的数据如表4所示。
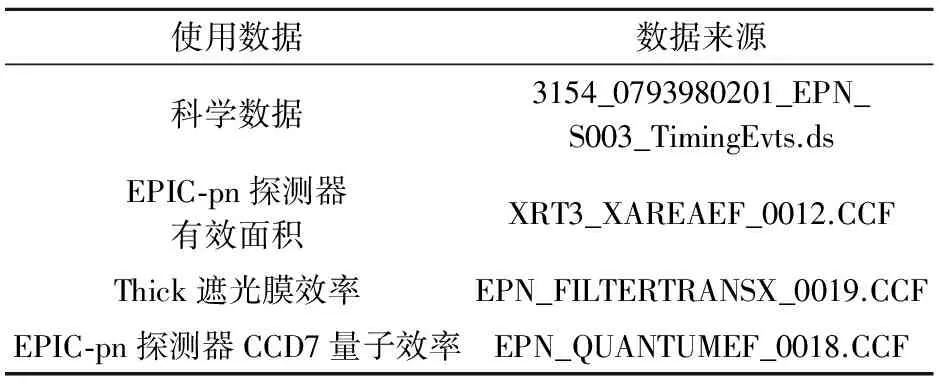
表4 使用XMM-Newton卫星数据版本Table 4 Version of XMM-Newton satellite data
上述XMM-Newton卫星科学数据是EPIC-pn探测器在计时模式下采集的。在该模式下,EPIC-pn探测器使用CCD7敏感器单元和“Thick”遮光模。在探测器正对目标源的假设下,造成探测器有效面积损失的主要因素有掠入射镜头对光子的吸收、遮光模光子的吸收以及敏感元件的量子转换效率。考虑以上因素,修正EPIC-pn探测器测量的Crab脉冲星(含星云本底)能谱曲线如图4所示。
图4中蓝(见网站电子版)方块是探测器实测曲线,红线(见网站电子版)是利用高斯函数拟合的曲线,黑色三角是实测值与拟合模型的残差。利用该拟合曲线与图3曲线做点除运算,标定的XPNAV-1卫星掠入射探测器的“能量-有效面积”曲线如图5所示。
图5中蓝(见网站电子版)方块是利用XPNAV-1和XMM-Newton卫星数据标定的有效面积曲线,红线(见网站电子版)是利用8项高斯函数
(2)
拟合的曲线,拟合参数如表5所示。黑色三角是标定值与拟合模型的残差。可以看出,XPNAV-1卫星搭载的掠入射探测器在低能段的探测效率较高,峰值有效面积约3cm2@1.1keV。
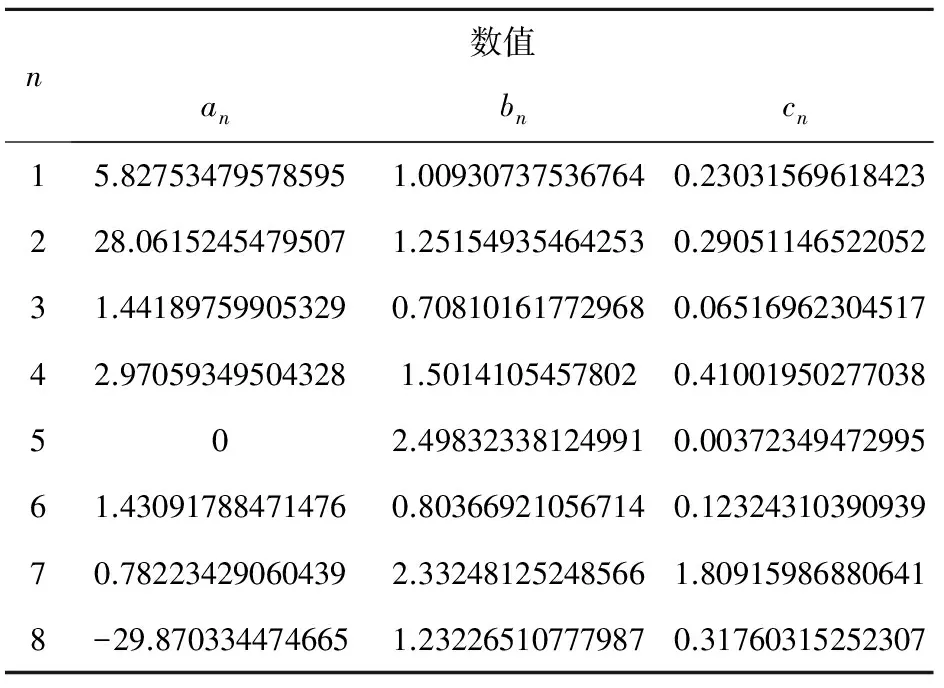
表5 “能量-有效面积”拟合曲线参数Table 5 Fitting parameters of the “Energy-Effective area” curve
为更好的体现探测器对脉冲星的探测能力定义探测器等价平均有效面积:
(3)
其中,g(E)是脉冲星能谱,A(E)是探测器“能量-有效面积”曲线,EL、EH是计算能区的上下限。利用图4和图5中的拟合曲线,计算掠入射探测器在Crab脉冲星光子流量较大的能区0.5~2 keV上的等价平均有效面积为2.3 cm2。
4 观测数据计时性能分析
4.1 Crab脉冲星信号观测周期分析
脉冲星周期测量精度反映了探测器计时装置的精度,是探测器的一项重要指标。英国Jodrell Bank天文台[21]发布的2016年12月16日的Crab射电信号周期为0.033730087359680 s。为了与Jodrell Bank公布结果进行对比,对XPNAV-1卫星在2016年12月16日的5个观测弧段数据进行周期搜索[22-23]计算,得到Crab的周期为0.0337300859-94417 s,差异为1.365263 ns。
在11月18日至12月19日之内,试验卫星观测信号周期与Jodrell Bank天文台射电信号周期的比较,如图6所示,误差平均值为1.992857 ns,标准差为15.130303 ns。
Fermi卫星搭载的LAT探测器是一种大面积大视场的空间高能射线探测器,其视场可覆盖20%的天区,扫描全天区仅需3小时。因此,它有大量的相对连续的Crab观测数据,可用于脉冲星计时研究。在11月18日至12月19日之内,试验卫星观测信号周期与同期Fermi卫星数据处理的周期的比较,如图7所示,误差平均值为0.974007 ns,标准差为16.323244 ns。
4.2 Crab脉冲星信号轮廓恢复
通过分析Crab脉冲星信号轮廓情况可以反映探测器对观测信号的恢复性能和探测器时延响应等性能。筛选观测比较密集的XPNAV-1卫星2016年12月4日到2016年12月19日期间的Crab观测数据,得到有效数据时长48969.1 s。下面利用这些数据建立Crab脉冲星信号轮廓。轮廓恢复的步骤为:1)将光子到达时间转换至TDB时间系统。2)将光子到达时间修正到太阳系质心SSB处。3)利用表2所示Crab星历参数对光子进行历元折叠处理。
RXTE卫星发射时间较早,国外有众多基于该卫星数据的Crab脉冲星信号特征分析成果发表,在国内外有较高的认可度。本文选用RXTE卫星数据轮廓与XPNAV-1星数据进行对比,如图8所示。
图8中RXTE卫星数据来自于编号为“20804-01-01-00”的数据包,为清楚地对比两者轮廓外形,RXTE卫星数据的信号轮廓进行了幅值调整。脉冲星信号轮廓信噪比与脉冲星信号脉冲部分光子数和本底光子数有关,计算公式如式所示:
(4)
其中,Npulse是脉冲星信号脉冲部分光子数,Nbg是背景本底噪声部分光子数。因此,图8中XPNAV-1卫星信号信噪比为71.64。
选择有同期Crab观测任务的Fermi卫星,并提取其LAT探测器数据,进一步对比Crab信号轮廓的相位延迟情况[24]。选取的Fermi卫星LAT探测器数据时间范围为2016年11月20日至2017年12月20日。分别将两颗卫星数据折叠至MJD 57697.040344历元,Crab信号轮廓对比如图9所示。
利用互相关法相位差估计法估计两者相位差:
(5)
其中,p1(t)、p2(t)是两组待求解相位差的信号轮廓,δ是信号每点的相位宽,N是信号采样点数。Fermi-LAT探测器矫正能段时延后信号与XPNAV-1掠入射探测器所探测的信号相位差为0.001,折算成时间为33.7 μs,在理论估计精度
(6)
3倍σ限以内。其中W为Crab脉冲星信号轮廓的半高宽[25],rSNR为图9中XPNAV-1卫星数据折叠轮廓的信噪比。
4.3 Crab脉冲星信号计时分析
脉冲星计时是脉冲星自转等参数的估计方法,不同观测数据来源的计时残差对比可以反映探测器的计时精度。利用2016年11月18日到2016年12月19日的Crab数据,使用tempo2脉冲星计时分析软件,得到计时结果如图10所示。由图10可看出,XPNAV-1的计时结果与Fermi的结果一致。精度优于200 μs。图11给出了脉冲轮廓在这段时间内的演变。
通过分析对比脉冲星信号周期测量精度、脉冲星信号轮廓恢复精度和脉冲星计时残差估计精度,证明我国掠入射聚焦型探测器具有良好的计时性能,不仅与国外公布数据趋势相吻合而且量值差异也很小。这有利于将该类型探测器应用于X射线脉冲星导航。
5 结 论
本文通过数据处理从观测数据计数统计、光子能量响应、计时性能三方面对XPNAV-1卫星搭载的掠入射聚焦型探测器观测性能进行了分析,主要结论如下:
(1)XPNAV-1卫星观测的Crab脉冲星流量计数存在波动,这说明在卫星探测器可能受到了空间噪声的干扰。
(2)基于XMM-Newton卫星的科学数据和探测器校正数据,本文构建了XPNAV-1卫星掠入射探测器的“能量-有效面积”响应曲线,探测器的有效面积约为3 cm2@1.1 keV。
(3)通过第4节中对XPNAV-1卫星数据和国外公开数据的对比分析,证明掠入射聚焦型探测器的计时精度较高,Crab脉冲星信号周期与国外数据仅有十几纳秒的误差。
经过以上数据处理与分析,可以看出我国自主研发的X射线脉冲星探测器观测结果与国外天文卫星观测结果的一致性较好,但还存在探测器有效面积小、对空间粒子噪声的抑制能力不足等差距。针对这些差距后续还将开展新的脉冲星导航试验计划,相信届时我国脉冲星探测器技术一定会更上一层台阶。
[1] Lyne A, Graham-smith F. Pulsar Astronomy [M]. Cambridge: University Press, 2012.
[2] Hanson J. Principles of X-ray navigation [M]. California: Stanford University, 1996.
[3] Wang Y D, Zheng W, An X Y, et al. XNAV/CNS integrated navigation based on improved kinematic and static filter [J]. Journal of Navigation, 2013, 66(6): 899-918.
[4] 黄良伟, 帅平, 张新源, 等. 一种近地航天器脉冲星地固系动力学定轨方法[J]. 宇航学报, 2016, 37(8): 895-900. [Huang Liang-wei, Shuai Ping, Zhang Xin-yuan, et al. A method of pulsar based dynamic orbit determination in the earth fixed reference frame for near earth spacecraft [J]. Journal of Astronautics, 2016, 37(8): 895-900.]
[5] Jahoda K, Swank J H, Giles A B, et al. In-orbit performance and calibration of the Rossi X-ray Timing Explorer (RXTE) Proportional Counter Array (PCA) [C]. Proceedings of SPIE-the International Society for Optical Engineering, Denver, USA, August 4-9, 1996.
[6] Zhang D P, Zheng W, Wang Y D, et al. X-ray pulsar profile recovery based on tracking-differentiator [J]. Mathematical Problems in Engineering, 2016(1): 1-10.
[7] Jansen F A. XMM: advancing science with the high-throughput X-ray spectroscopy mission [J]. ESA Bull. 1999, 100: 9.
[8] Rosati P, Tozzi P, Giacconi R, et al. The chandra deep field-south: the 1 million second exposure [J]. Astrophysical Journal, 2002, 556(2): 667-674.
[9] Burrows D N, Hill J E, Nousek J A, et al. Swift X-ray telescope (XRT) [C]. Proceedings of SPIE-X-ray and Gamma Ray Telescopes and Instruments for Astronomy, Waikoloa, USA, August 22-28, 2002.
[10] Sguera V, Sidoli L, Paizis A, et al. First hard X-ray detection and broad band X-ray study of the unidentified transient AX J1949.8+2534 [J]. MNRAS, 2017, 469(4): 3901-3908.
[11] Abdo A A, Ackermann M, Ajello M, et al. Fermi large area telescope first source catalog [J]. Astrophysical Journal Supplement, 2010, 188(1): 405-436.
[12] Winternitz L M B, Hassouneh M A, Mitchell J W, et al. X-ray pulsar navigation algorithms and testbed for SEXTANT [C]. Proceedings of IEEE Aerospace Conference, Motana, USA, March 7-14, 2015.
[13] Ge M Y, Lu F J, Qu J L, et al. X-ray phase-resolved spectroscopy of PSR B0531+21, B1509-58, and B0540-69 with RXTE [J]. ApJS. 2012, 199(2): 3.
[14] 孙海峰, 包为民, 薛梦凡, 等. 一种X射线脉冲星导航的多普勒频移估计方法[J]. 宇航学报, 2015, 36(8): 900-905. [Sun Hai-feng, Bao Wei-min, Xue Meng-fan, et al. A Doppler shift estimation method for X-ray pulsar based navigation [J]. Journal of Astronautics, 2015, 36(8): 900-905.]
[15] Wang Y D, Zheng W, Sun S M. X-ray pulsar-based navigation system with the errors in the planetary ephemerides for Earth-orbiting satellite [J]. Advances in Space Research, 2013, 51(12): 2394-2404.
[16] 郭倩. “快箭”长征十一号成功发射脉冲星试验卫星[J]. 中国航天, 2016, 12(1): 9. [Guo Qing. LM-11 successfully launched XPNAV-1 [J]. Aerospace China, 2016, 12(1): 9.]
[17] Huang L W, Shuai P, Zhang X Y, et al. XPNAV-1 satellite timing data analysis and pulse profile recovery [J]. Chinese Space Science and Technology, 2017, 37(2): 1-10.
[18] Zhang X Y, Shuai P, Huang L W, et al. Mission overview and initial observation results of the X-ray Pulsar Navigation-I Satellite [J]. International Journal of Aerospace Engineering, 2017, 2017(1): 1-8.
[19] 郑世界, 葛明玉, 韩大炜, 等. 基于天宫二号POLAR的脉冲星导航实验[J]. 中国科学:物理学、力学、天文学, 2017, 47(9): 099505-3. [Zheng Shi-jie, Ge Ming-yu, Han Da-wei, et al. Test of pulsar navigation with POLAR on TG-2 space station [J]. Scientia Sinica Physica, Mechanica & Astronomica, 2017, 47(9): 099505-3.]
[20] Emadzadeh A, Speyer J. Navigation in space by X-ray Pulsars [M]. London: Springer Press, 2011.
[21] Lyne A G, Pritchard R S, Graham-Smith F. 23 year of Crab pulsar rotational history [J]. MNRAS, 1993, 265(4): 1003-1012.
[22] 葛明玉. 脉冲星的X射线辐射特性研究[D]. 北京: 中国科学院研究生院, 2012. [Ge Ming-yu. The X-ray emission of pulsars [D]. Beijing: Graduate University of CAS, 2012.]
[23] 张新源, 帅平, 黄良伟. 脉冲星导航轮廓折叠失真与周期估计算法[J]. 宇航学报, 2015, 36(9):1056-1060. [Zhang Xin-yuan, Shuai Ping, Huang Liang-wei. Profile folding distortion and period estimation for pulsar navigation [J]. Journal of Astronautics, 2015, 36(9): 1056-1060.]
[24] 褚永辉, 王大轶, 熊凯, 等. X射线脉冲星导航测量延时补偿方法研究[J]. 宇航学报, 2012, 33(11): 1617-1618. [Chu Yong-hui, Wang Da-yi, Xiong Kai, et al. Research on measurement time-delay compensation on X-ray pulsar-based navigation [J]. Journal of Astronautics, 2012, 33(11): 1617-1618.]
[25] Sheikh S I. The use of variable celestial X-ray sources for spacecraft navigation [D]. MaryLand: University of MaryLand, 2005.
猜你喜欢
车迷(2022年1期)2022-03-29
北京航空航天大学学报(2021年7期)2021-08-13
中国化妆品(2020年9期)2020-10-09
小学生学习指导(低年级)(2019年10期)2019-11-26
发明与创新·大科技(2019年11期)2019-03-07
小学生学习指导(低年级)(2018年11期)2018-12-03
北京航空航天大学学报(2018年1期)2018-04-20
儿童故事画报·自然探秘(2017年2期)2017-09-26
百科知识(2017年3期)2017-03-17
太空探索(2016年12期)2016-07-18
