大坝平面变形控制网观测及稳定性分析
2018-05-04 07:25葛文何文峰王英林徐长虹陈锦林
城市勘测 2018年2期
葛文,何文峰,王英林,徐长虹,陈锦林
(宁波市测绘设计研究院,浙江 宁波 315402)
1 引 言
华东琅琊山抽水蓄能电站主要建筑物由上水库主坝、副坝、水道、地下厂房、尾水明渠及下水库组成,整个工程的等级为二级,相应的建筑物等级也是按照二级来设计建造。
为了监测主副坝工作基点的稳定性以及兼顾其他部位的监测需要,布设平面控制网并定期进行观测至关重要,对大坝的安全运营具有重要意义。
平面监测网由9个点组成,为边角网形式,点号分别为:LS1、LS2、LS3、LS4、LE1、LE2、LE3、LE4、LE5,外业按照国家一等三角网精度进行观测。平面网示意图如图1所示。平面控制点均为钢筋混凝土观测墩,监测频率为每年一次,截至2017年,平面监测网已观测了9期数据,为了分析比较控制网的稳定性,文中采用第8期和第9期的数据进行对比分析。
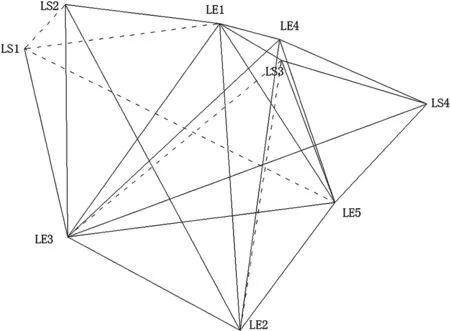
图1 琅琊山水电站平面监测网示意图
2 大坝平面变形控制网
2.1 外业观测
观测仪器采用瑞士Leica TM30高精度智能全站仪,仪器的标称精度:测边为(0.6+1×D×10-6)mm;测角为0.5″,测量前对仪器补偿器纵横误差、指标差、照准差、横轴倾斜误差以及自动目标识别(ATR)等日常检测项目进行了检验,并将检测值设置在仪器中自动改正。
(1)水平角观测
控制网的水平角度测量按照国家一等三角网观测精度要求施测,采用全圆方向观测法观测12测回,全网共有50个方向。照准标志使用徕卡配套棱镜、觇牌,水平方向值观测全部以标石中心为准,无测站归心和照准归心改正。水平角观测全部方向测回在同一时段完成,观测均选择呈像清晰的天气作业。观测的各项技术指标及限差要求如表1所示。
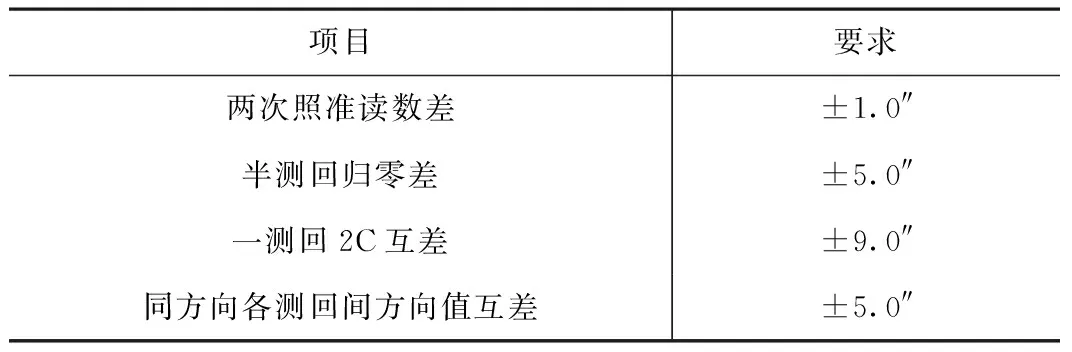
水平方向观测测站限差要求 表1
(2)边长观测
边长采取对向观测,每条边单向观测4测回,每测回读取4次数据至 0.1 mm,中数读取至 0.01 mm,全网观测边长25条。边长技术要求如表2、表3所示。
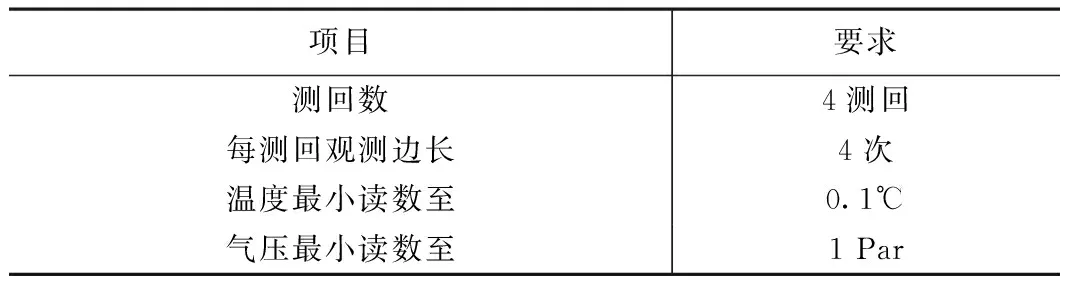
边长观测技术要求 表2
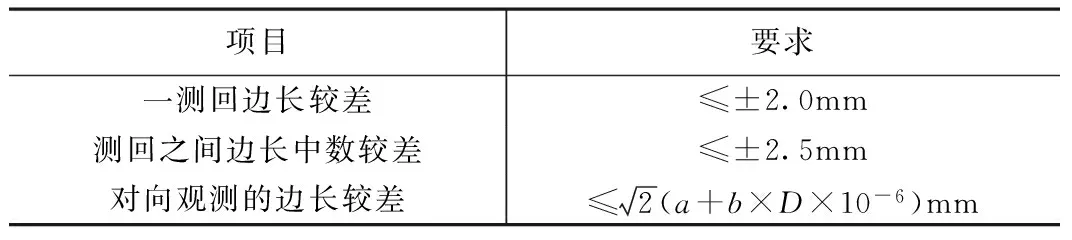
边长观测限差 表3
边长观测时使用干湿温度计和空盒式温度气压表分别测定测站点与镜站点的干温、湿温和气压,其均值作为气象改正的参数。并分别在测站与镜站的3个方向上测量仪器高和棱镜高,读至 0.1 mm。
(3)天顶距观测
每条边对向观测间均进行天顶距观测,共观测50个方向天顶距。每个方向天顶距盘左、盘右各观测12测回,观测的技术指标及限差设置如表4所示。
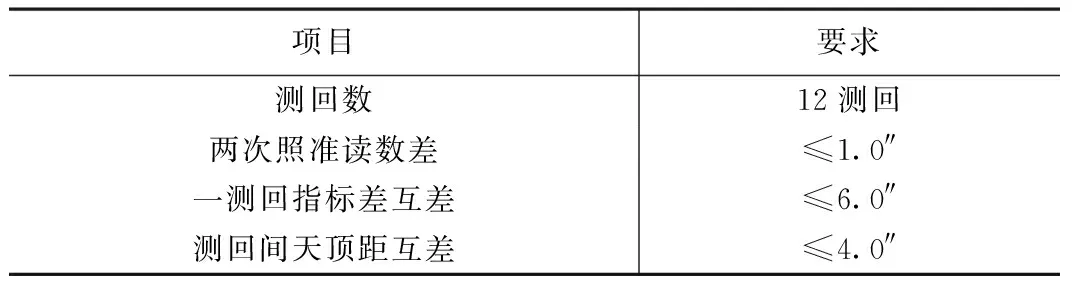
天顶距观测技术要求 表4
2.2 数据预处理
(1)水平角校核
(2)边长结果改正计算
全站仪直接测得的距离应采用气象改正、仪器加常数改正和仪器乘常数改正。野外测量距离时,测站与镜站一般高程不同,实际计算时,需将其转化为平距。平距值也会随着高程面的不同而不同。椭球面上的距离投影至高斯面上也有长度变形,也要对其进行改正。斜距化平按式(1)计算、测距边的高程归化按式(2)计算[2]、测距边的投影改化按公式(3)计算[3]。

(1)
式中,a为垂直角观测值;K为大气折光系数;S为已经气象及加、乘常数改正后的斜距;R为地球平均曲率半径(m);f为大气折光和地球曲率对垂直角的综合改正值;p为弧与度的转换算常数,ρ=202625。
(2)
式中,D0为测距两端点平均高程面上的水平距离;Ra为参考椭球体在测距边方向法截弧的曲率半径;Hp为投影面高程;Hm为测距边两端点的平均高程。
(3)
式中,Ym为测距边两端点横坐标平均值;Rm为测距边中点的平均曲率半径;△Y为测距边两端点近似横坐标的增量。

(3)天顶距计算
按照全网的25条边进行了对向天顶距观测,共观测了50个方向的天顶距,每个方向观测12个测回,取均值作为边长观测值。
通过上面三步骤的计算和检验,可以认为外业成果完全可靠,达到了国家一等三角网精度指标,满足了设计要求。外业观测全部结束,开始平差计算。
2.3 平差计算
(1)粗差检验
平差前,先对所有观测值进行粗差检验,采用U检验法[4],以α=0.05为置信度,φ(x)=1-α/2=0.975,查“标准正态累积分布函数”得到χ=1.95作为粗差检验的临界值,经检验6个方向存在粗差,1条边长存在粗差,分别是LE5-LE3方向为2.42;LE3-LS4方向为2.83;LS1-LE1方向为2.13;LE1-LE4方向为2.21;LS4-LE5方向为2.00;LS4-LS3方向为2.69;LE4-LE3边长为2.02;
观测值粗差会降低平差结果的精度,所以平差前将存在粗差的6个方向和1条边长剔除掉。
(2)控制网平差
平差时边长和方向先验中误差分别按0.6 mm+1.0 ppm和0.5″定权,平面监测网平差是用观测边长、方向观测值采用最小二乘方法平差。平差时将网看成独立边角网,以第八期复测平面坐标作为为网的近似坐标,采用秩亏自由网平差法[5]计算。平差软件采用武汉大学开发的科傻软件,以LE5点的坐标为起算数据,X=755 448.332 0,Y=19 144.279 0。平差数据如表5所示,平面监测网点位中误差如表6所示。
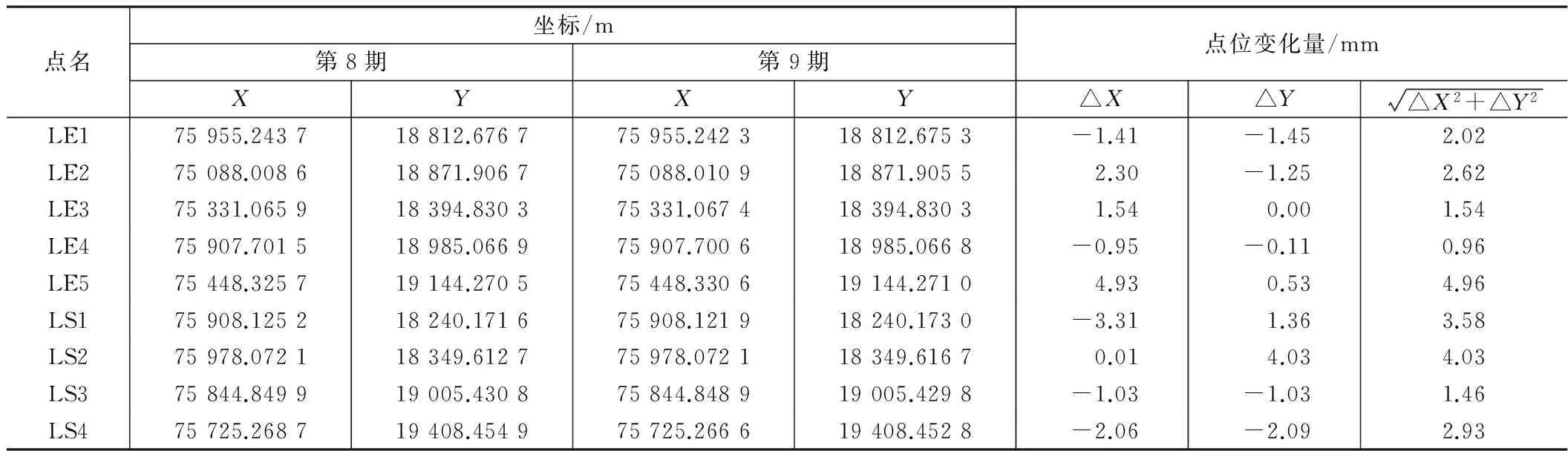
第八期与第九期平差后坐标比较表 表5
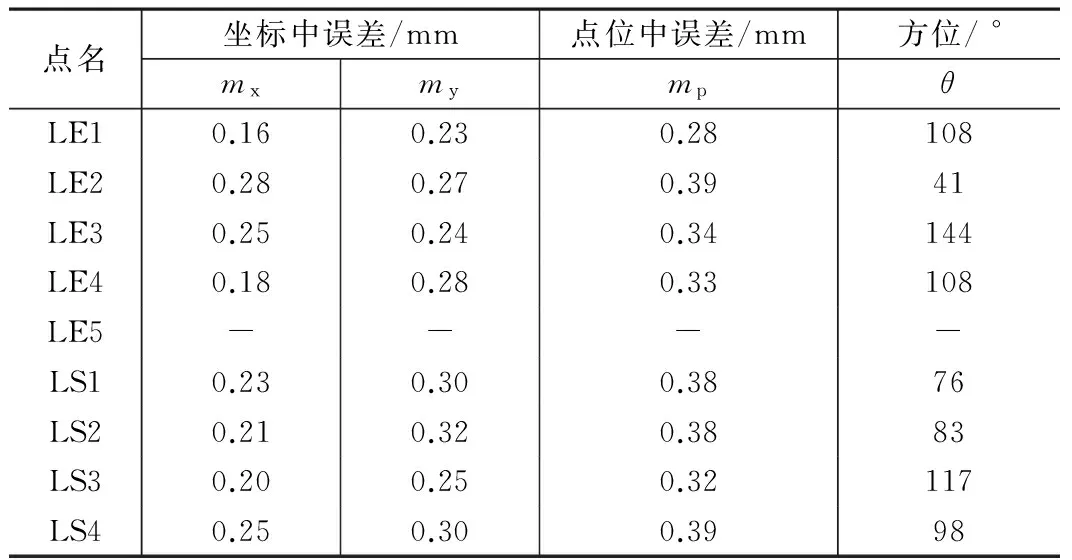
平面监测网点位中误差 表6
由平差结果可知:最弱边是LS2-LS1,边长相对中误差为1/311 000,最弱点是LS2点,点位中误差为 ±0.39 mm;最弱点对是LS2—LE2,相对点位中误差为 0.59 mm,远小于《土石坝安全监测技术规范》中所规定的 ±3 mm的要求,已达到了《混凝土大坝安全监测技术规范》中所规定的 ±2 mm的要求。平差的精度指标说明该网具有较高的可靠性,且点位精度高。
3 点位稳定性分析
从表5中的比较结果可得知:相对于第8期复测平差结果,最大的点位变化量LE5为 4.96 mm,其次LS2为 4.03 mm,最小的LE4为 0.96 mm,这些变化量既有可能是点位发生了位移,也有可能是测量误差所引起,必须通过点位稳定性分析加以判断。
3.1 平均间隙法
该方法的基本思想[6]是:首先利用统计检验的方法对控制网作几何图形一致性检验(即整体检验),以判明该网在两期观测之间是否发生了显著性变化。如果检验通过,则认为所有网点是稳定的。反之,则认为网中存在位移点,然后再采用“尝试法”依次寻找动点,直到图形一致性(指去掉不稳定点后的图形)通过检验为止。
假设对监测网第j期和第i期做检验,首先将这两期观测数据按同一基准分别平差后,由计算可求得网点位移向量和其协因数阵Qd。由点的坐标变化值(间隙)d=Hj-Hi,可得单位权方差估值:
(4)
式中,fd为独立d的个数,Pd为d的权阵。
两期观测的单位权方差经同一性检验通过后,可求得综合方差估值
(5)
式中,V为观测值改正数列矩阵,P为观测值改正数权矩阵,f为第i、j期多余观测总数。可得:
(6)
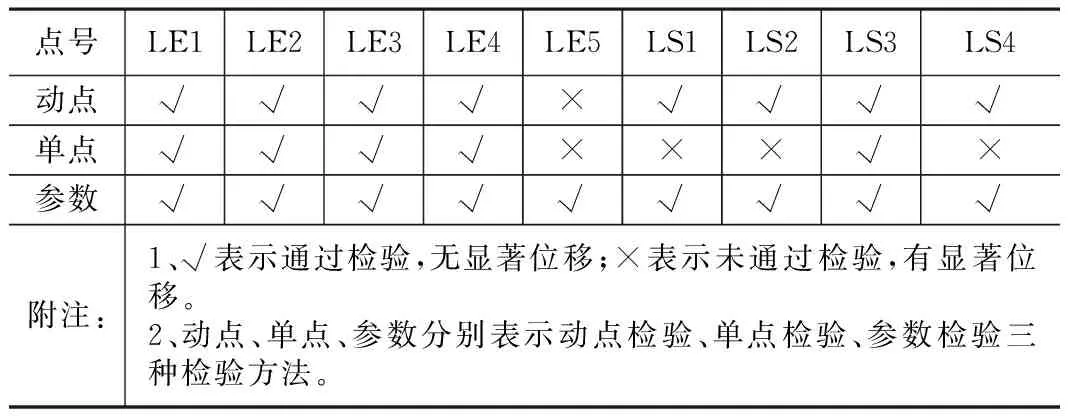
T是一个以自由度为f和fd的F分布变量。对网图形的一致性做检验,若T 探寻网中的动点采取分块间隙法,即:将d和Pd分解为动点与稳定点两部分: (7) 式中:下标M、F分别表示动点与稳定点。令 (8) 可得: (9) 作统计量 (10) 若FF≤F(fF,f0),认为上述分块是正确的,否则,说明稳定点的分块中还有动点,应剔除其中位移量最大的点重新进行上述检验,直到通过为止。 (11) 若T>F(α;fd,∞),则认为存在不稳定点。然后,采用“尝试法”逐点进行位移分量(其位移分量可以是一点的某一方向)检验,检验统计量为: (12) 式中:ei是一向量,以说明需要检验的i点在某一方向上的位移分量。不论是一维、二维或三维网,该统计量是一维的。若 (13) 则认为i点是动点。如果存在多个wi满足式(11),则认为值最大的为动点,将它从监测网中剔除出去,重新进行整个检验过程。 形变参数显著性检验[8]的原理是将两期观测放到一起来平差,但每次假定有一个点发生了位移,导入两个位移参数(dx,dy),通过平差求出位移参数并对其显著性进行检验。 两次成果比较必须采用同一基准下的成果才有可比性,不同基准下的成果是没有可比性的,特别是变形监测网重视基准的统一性。因此检验中采取第9期平差成果与第8期平差成果进行了检验。 上述三种方法简称为动点检验法、单点检验法和参数检验法。采用第8期和第9期观测成果分别对平面监测网作了形变检验和参数显著性检验,检验过程中采用秩亏自由网平差,显著性水平α均取0.05。 在动点检验时整体检验未通过,接着进行动点检验,除了LE5点,其余都认为是稳定点。 单参数检验找出了LE5、LS1、LS2和LS4四个动点,其余都认为是稳定点。 参数检验结果全都是不显著的,即认为平面监测网点都是稳定的。检验结果统计如表7所示。 点位稳定性检验结果统计表 表7 检验结果统计于表7。从表中可以清楚地看出,LE5是两种检验方法都认为有可能位移了,而LS4、LS1和LS2被单点检验方法定为动点。综合起来看,应当认为最有怀疑可能产生位移动的点是LE5,其本期位移量值为 4.96 mm;而LS1、LS2和LS4是仅被一种方法检验认为是位移了,其本期位移量分别为 3.58 mm、2.93 mm和 4.03 mm。综上分析表明,本期监测琅琊山平面变形监测网中LE5、LS1、LS2和LS4这4点出现了位移,除LE5点位移量较大外,另3点都较小,其他点都是稳定点。因此,可以认为,该网作为大坝变形监测的基准,具有较高的可靠性和点位的稳定性。 (1)本次大坝外部变形网严格按照相关规范技术进行观测,各项技术指标达到了规范要求,外业数据全部进行了检验,平差计算科学、严密,成果质量优良,各项精度指标达到规定要求。 (2)大坝外部变形控制网平差前要对观测值进行粗差剔除,观测边长要经过斜距化平、测距边高程归化、投影归化等处理后才可平差。 (3)通过对平面监测网采用三种方法进行的点位稳定性分析结果:监测网中LE5、LS1、LS2和LS4三点出现了位移,LE5点位移量最大,平面位移量为 4.96 mm,沉降量为 -5.10 mm(“-”表示上抬);LS2、LS1和LS4点位移量其次,其平面位移量分别为 4.03 mm、3.58 mm和 2.96 mm,网中其他点都是稳定点。因此,可以认为,该网具有较高的可靠性和稳定性,为大坝变形监测提供了可靠的平面基准。 (4)琅琊山水电站外部控制网观测可靠,计算方法简便,稳定性分析合理,在大坝外部变形控制网测量中有很大的实际应用价值。 [1] 刘文北,韩德海. 关于平差后测角单位权中误差略大于按菲列罗公式求得的中误差问题[J]. 测绘与空间地理信息,1994(Z2):14~17. [2] 王珍. 距离归化改正在地铁精密导线测量中的应用[J]. 工程勘察,2010(S1):670~676. [3] 姜晓东. 浅谈城市工程测量平面控制网坐标系统投影带、投影面的选择[J]. 中国电子商务,2010(3):171. [4] 张勤,张菊清,岳东杰. 近代测量数据处理与应用[M]. 北京:测绘出版社,2011:125. [5] 赵超英,黄观文. 秩亏自由网平差及其通解[J]. 地球科学与环境学报,2010,32(2):215~217. [6] 韩易,黄腾,沈月千等. 基于改进平均间隙法的狭长区域平面控制网稳定性检验[J]. 水利与建筑工程学报,2013,11(2):164~167. [7] 杨学超,何彩平. 平均间隙法和单点检验法在变形监测网中的应用[J]. 兰州交通大学学报,2011,30(6):30~32. [8] 张勤. GPS监测滑坡形变的基准研究[J]. 地球科学与环境学报,2001,23(4):69~71.3.2 单点位移分量法

3.3 形变参数显著性检验
4 点位稳定性分析
5 结 论
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
中学生数理化·中考版(2019年8期)2019-07-13
数学小灵通·3-4年级(2017年12期)2018-01-23
中学生数理化·七年级数学人教版(2017年9期)2017-12-20
数学大世界(2017年15期)2017-06-21
导航定位学报(2015年2期)2015-06-05
中学数学杂志(高中版)(2015年3期)2015-05-28
中学数学杂志(2015年9期)2015-01-01
铁路通信信号工程技术(2014年1期)2014-02-28
中国质量与标准导报(2013年8期)2013-03-11