TBC和LGO在GNSS数据处理中的对比和应用研究
2018-05-04 07:25胡玉祥王智张洪德孟庆年
城市勘测 2018年2期
胡玉祥,王智,张洪德,孟庆年
(青岛市勘察测绘研究院,山东 青岛 266032)
1 引 言
在地铁建设中,建立高精度的GPS首级控制网必不可少,GPS数据观测往往混合使用不同类型接收机[1]。一般来说,不同GPS接收机厂商有自己专有格式的数据存储形式,需要相应配套的数据处理软件进行处理、转换[2,4,5]。RINEX格式是一种与接收机类型无关的数据交换格式,该格式采用文本文件形式存储数据,方便直观,这就为不用接收机数据混合处理提供了方便。
LGO和TBC作为两款流行的GPS数据处理随机软件,由于解算模型和生产工艺面的差异,两者解算精度有较大区别[7,9]。考虑到TBC软件的优势,本文将青岛地铁徕卡接收机RINEX格式数据用TBC基线解算后平差,并与LGO基线解算后平差结果进行对比,结果表明,TBC基线解算结果优于LGO基线解算结果。
2 GPS静态数据处理
从算法角度讲,GPS静态数据处理流程分为数据传输、格式转换、基线解算和网平差四个阶段(如图1所示)。数据传输主要利用配套的随机软件,以下主要叙述格式转换、基线解算和网平差的相关知识。
2.1 格式转化
TEQC是由UNAVCO Faclity研制的为地学研究GPS监测站数据管理服务的公开免费软件,主要有格式转换(Translate)、数据编辑(Edit)、质量检查(QualityCheck)单点定位(Coordinate)四方面的功能[3]。
为了保证软件的兼容性,将接收机数据转换成标准的RINEX格式,把TRIMBLE接收机所接收到的数
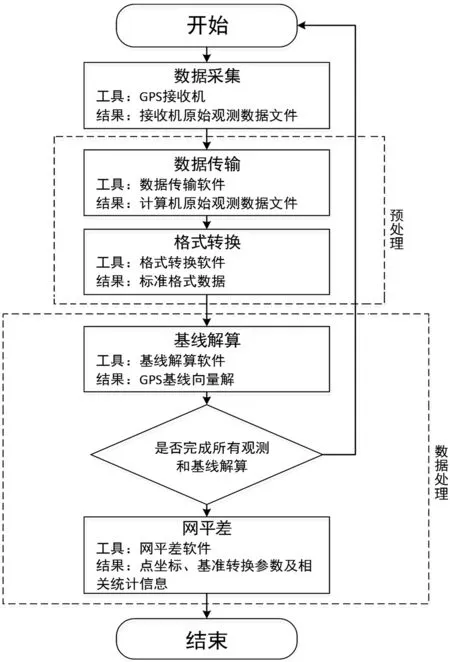
图1 GPS静态数据处理流程
据文件转换成RINEX观测数据文件、导航数据文件和气象文件,命令格式如下:
teqc -tr do -week 1323 +nav trimbel.05n trimbel.dat > trimbel. 05o
式中,-tr 指明接收机的类型为trimble;do 指明输入文件为Dat 文件、输出为RINEX 观测数据文件(o文件);-week 1323 (可选) 指明观测日期对应的GPS 周数,或以年/月/日方式表示(即上述命令也可以表示成teqc -tr do -week 2015/05/18 +nav trimbel.15n trimbel.dat > trimbel. 15o);+nav 指明同时输出RINEX 导航数据文件;转换结果文件为观测数据文件trimbel.15o 和导航文件trimbel.15n。
同理,将徕卡接收机数据文件转换成RINEX格式,命令如下:
teqc -lei mdb +nav 0319_2508.10n 0319_2508.m00 > 0319_2508.10o
2.2 基线解算
基线解算过程就是由多台GPS接收机在野外通过同步观测采集到的观测数据,确定接收机间基线向量及其方差-协方差阵的过程。
同一时段观测值的数据剔除率宜小于10%。GPS控制测量外业观测的全部数据应经同步环、异步环及复测基线检核,并应满足下列要求:
(1)同步环各坐标分量闭合差及环线全长闭合差,应满足下列各式要求:
式中:n——同步环中基线边的个数
W——同步环环线全长闭合差(mm)
σ——基线测量中误差,单位为毫米(mm)
(2)异步环闭合符合下式的规定:
式中:n——异步环中基线边的个数
σ——基线测量中误差,单位为毫米(mm)
(3)复测基线较差不超过下式规定
式中:σ——基线测量中误差,单位为毫米(mm)
数据检验中,当重复基线、同步环、异步环或附合路线中的基线超限时,应舍弃基线后重新构成异步环,所含的异步基线数和闭合差应符合规范要求,否则要进行重新观测。
2.3 网平差
基线解算得到的三维基线向量仅能确定GPS网的几何形状,但无法提供最终网中点的绝对坐标,通过引入起算点坐标可以达到引入绝对基准的目的。
(1)三维无约束平差
应将全部独立基线构成闭合图形,以三维基线向量及其相应方差协方差阵作为观测信息,在WGS-84坐标系中进行三维无约束平差,并提供WGS-84的三维坐标、观测值的总改正数、基线边长以及点位和边长的精度信息。基线向量改正数的绝对值应满足下列各式的要求:
v△x≤3σ
v△y≤3σ
v△z≤3σ
式中:σ——基线测量中误差,单位为毫米(mm)
(2)二维约束平差
平差前,在青岛城市坐标系下,对起算点进行兼容性检查分析。分别用其中的若干个已知点计算其余点,将计算值和已知值进行比较,如果坐标分量互差不大于 2.0 cm,说明已知点间的兼容性良好,可以作为起算点,如果坐标分量互差大于 2.0 cm,则剔除该点。
将兼容性良好的点作为起算基准,计算出控制网点的青岛城市坐标系坐标成果,并将其作为地面施工测量的控制点成果使用。约束平差后,输出成果包括各点位的坐标、基线向量改正数、基线边长和方位角、边长和方位的精度信息等。
基线向量的改正数与同名基线无约束平差相应改正数的较差应满足下列各式要求:
dv△x≤2σ
dv△y≤2σ
dv△z≤2σ
式中:σ——基线测量中误差,单位为毫米(mm)
测量成果输出宜包括相应坐标系中的三维或二维坐标、基线向量改正数、基线边长、方位角、转换参数及精度等信息。
3 青岛地铁实例分析
青岛地铁1号线某车辆段,由于跨度大、地域复杂,周边仅有少数高等级城市控制点,需要在此基础上布设卫星定位控制点与已有高等级控制点进行连续观测,如图2所示。2017年1月23日,利用4台徕卡GS14双频接收机进行观测,共7个时段。外业测量过程严格执行测量规范的要求,对外业观测数据进行检查,剔除不合格数据,确保内业解算数据质量。首先利用LGO进行基线解算,然后将原始数据通过TEQC转换成RINEX标准格式用TBC进行基线解算,将两种方式解算得到的基线向量分别利用武汉大学开发的CosaGPS进行网平差,平差过程除了使用的基线外,其余的参数设置完全相同。本文分析分为以下两部分:①从不同的指标分析两种随机软件基线解算效果;②对两种随机软件基线解算后网平差精度进行评价。
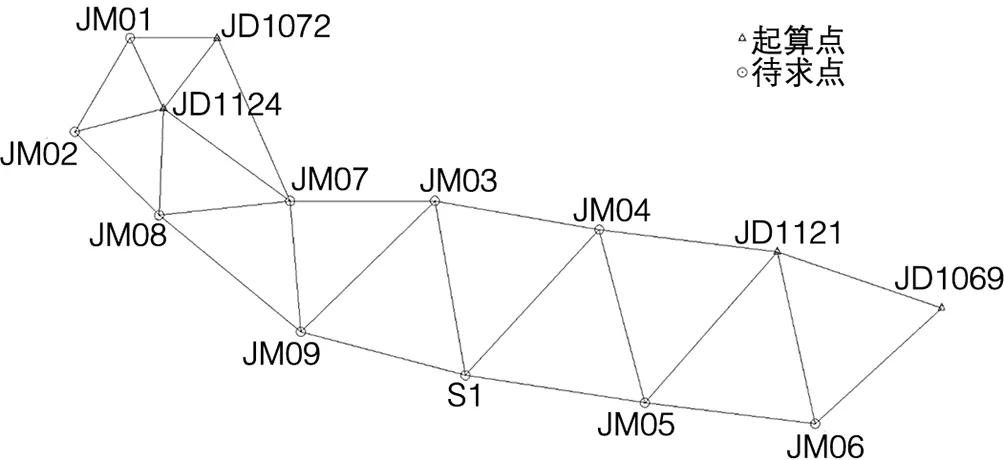
图2 GPS观测网图
(1)TBC和LGO基线解算结果对比
分别利用TBC和LGO进行基线解算,基线向量残差如表1所示,用TBC解算得到的残差绝对值与LGO解算得到的残差绝对值的差值如图3所示。
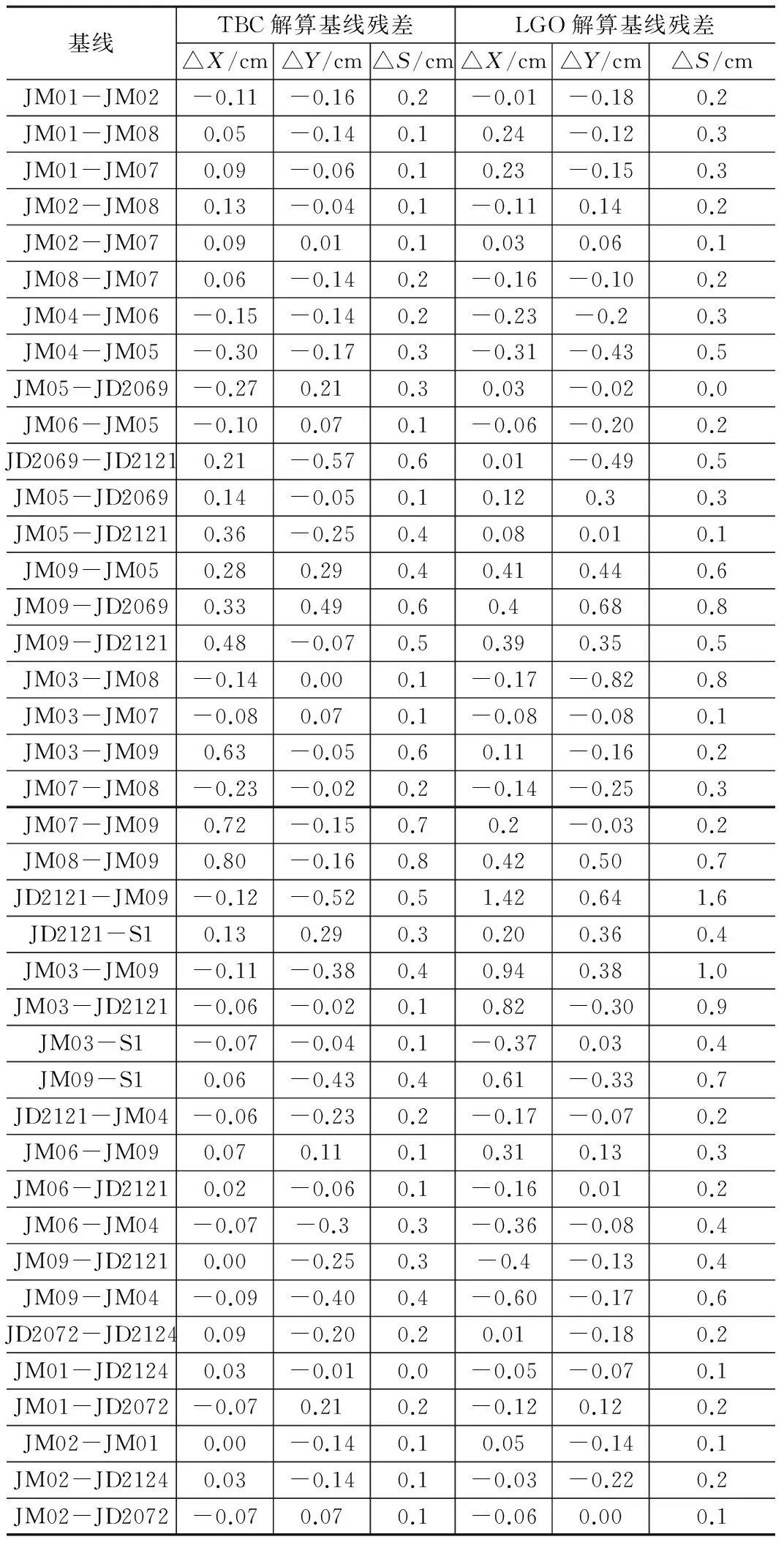
基线解算向量残差 表1
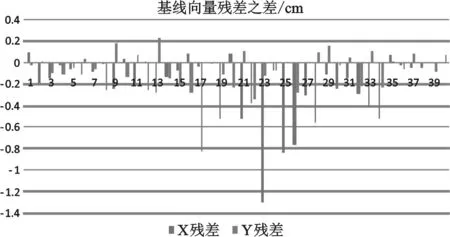
图3 基线向量残差绝对值之差
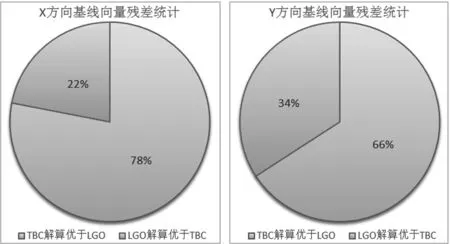
图4 基线向量残差绝对值之差百分比统计
从表1、图3、图4可以看出,①对于同等条件下观测得到的基线向量,用TBC解算得到的X残差绝对值有78%小于LGO解算残差绝对值,Y残差绝对值有66%小于LGO解算残差绝对值。②从基线向量残差分析,总体上用TBC解算基线优于LGO解算。
(2)两种随机软件基线解算后网平差精度对比
分别利用TBC和LGO进行基线解算后得到的基线,选取相同的独立基线参与二维约束平差,平差精度统计结果见表2;最弱点、最弱边精度信息见表3、表4。
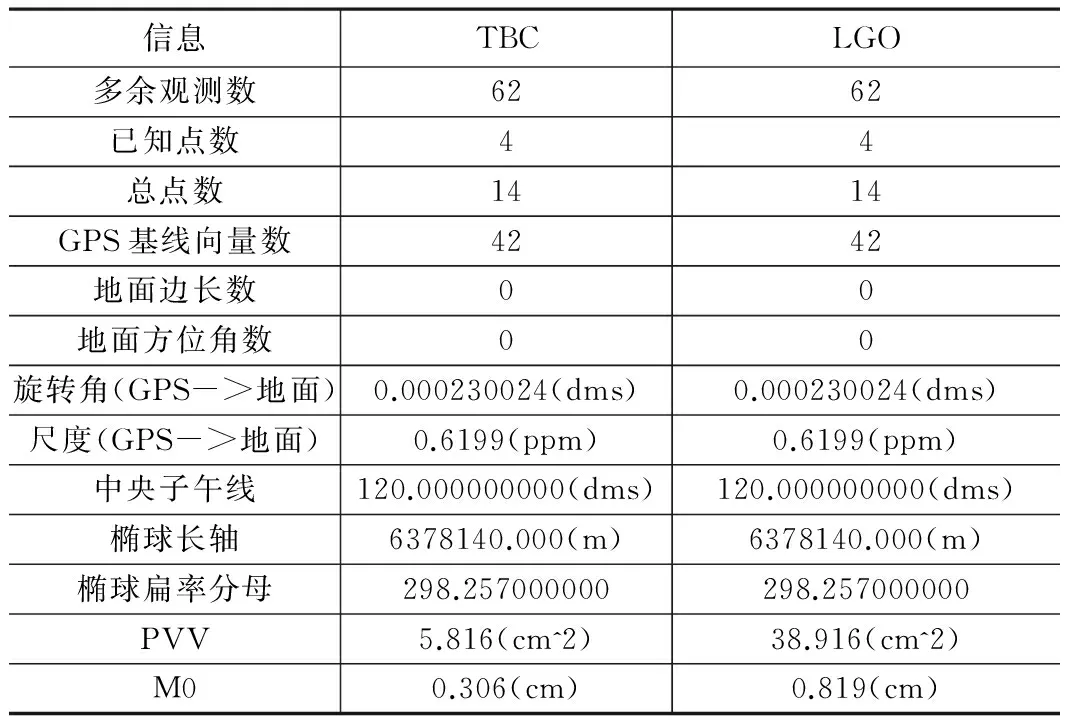
两种随即软件基线解算后二维约束平差总体信息 表2

二维约束平差最弱点点位及其精度 表3

二维约束平差最弱边及其精度 表4
从表2、表3、表4可以看出,①用TBC基线解算后网平差的验后单位权中误差为 3.06 mm,小于用LGO基线解算后网平差的验后单位权中误差 8.19 mm。②用TBC基线解算后网平差的最弱点点位中误差为 2.5 mm,小于用LGO基线解算后网平差最弱点中误差 3.3 mm。③用TBC基线解算后网平差的最弱边边长相对中误差为1/49000,优于用LGO基线解算后网平差最弱边边长相对中误差1/46000。④用TBC解算基线后网平差精度整体优于用LGO基线解算后网平差精度。
4 结 语
针对GPS作业过程中不同型号接收机的混合使用,相应配套的基线解算随机软件解算精度相差较大,本文考虑将不同类型接收机原始数据转换成标准的RINEX格式后统一使用TBC进行解算。该软件内部算法严密,数据处理模型综合考虑了大气折射、对流层、电离层等外界影响并进行了相应的改正,因而基线解算结果较好。将本文的方法应用到青岛地铁1号线GPS静态数据解算中,结果表明:在软件参数设置、先验精度等条件完全相同的情况下,用TBC基线解算后二维约束平差单位权中误差为 3.06 mm、最弱点中误差为 2.5 mm、最弱边边长相对中误差1/49000,用LGO基线解算后二维约束平差单位权中误差为 8.19 mm、最弱点中误差为 3.3 mm、最弱边边长相对中误差1/46000。因此,在GPS静态数据解算中,可以将不同接收机数据转换成标准RINEX格式,并用TBC进行基线解算。
由于本文只进行了LGO和TBC两种随机软件之间的对比验证,没有与其他软件进行对比。因此,后续工作将研究TBC软件与其他随机软件之间解算效果的比较,以便找给出更佳的基线解算方案。
[1] 李征航,黄劲松. GPS测量与数据处理[M]. 武汉:武汉大学出版社,2005.
[2] CH2001-92. 全球定位系统(GPS)测量规范[S].
[3] 吴月霞. 以地铁车站为核心的地下空间开发利用研究[D]. 上海:同济大学,2008.
[4] 徐绍铨,李征航,李振洪等. 隔河岩大坝外观变形GPS自动化监测系统的建立[J]. 武汉测绘科技大学学报,1998,23(S).
[5] 黄丁发,熊永良,周乐韬等. GPS卫星导航定位技术与方法[M]. 北京:科学出版社,2009.
[6] 黄劲松,李英冰. GPS测量与数据处理实习教程[M]. 武汉:武汉大学出版社,2010.
[7] 卢献建,任超. GPS数据处理科研软件与商业软件对比分析[J]. 全球定位系统,2007,32(5):29~32.
[8] 王潜心. GPS数据处理软件中若干问题的研究[D]. 长沙:中南大学,2005.
[9] 王国祥. GPS基线解算与质量控制[J]. 山东科技大学,2007:7~9.
[10] 王明孝,张之孔,马怀武等. 几种不同的GPS数据软件的对比[J]. 全球定位系统,2012,37(1):65~68.
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23
科学(2020年5期)2020-11-26
北京航空航天大学学报(2020年10期)2020-11-14
中国惯性技术学报(2019年3期)2019-10-15
自动化学报(2019年6期)2019-07-23
测控技术(2018年6期)2018-11-25
电子制作(2018年19期)2018-11-14
舰船电子对抗(2016年5期)2016-12-13
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24