基于模糊PID的电动静液作动器位置控制系统
2018-05-04 03:35:13祁晓野
自动化与仪表 2018年4期
任 彬,祁晓野
(北京航空航天大学 机械工程及自动化学院,北京 100191)
电动静液作动器EHA是一种新型伺服作动器,为新型功率电传飞控系统的重要组成。与传统液压作动系统相比,EHA系统具有响应速度快、集成度高、功重比大、可靠性高、效率高等优点。目前已广泛应用于航空、航天、舰船、地面武器装备等领域。
电动静液作动器的工作环境复杂多变,还受死区、滞环等非线性因素的影响。显然,电动静液作动器系统具有非线性时变性和不确定性等特点,常规的PID控制往往不能满足控制要求,为此,文中提出一种基于模糊PID的位置系统控制方法,提高系统的稳定性、快速性和准确性[1]。
1 系统组成及工作原理
电动静液作动器根据液压泵和电机控制方式的不同,分为定排量变转速控制、变排量定转速控制和变排量变转速控制3种。定排量变转速方式由于结构简单、效率高等因素,成为最常见的形式。在此EHA系统采用定排量变转速方式的结构。
电动静液作动器位置系统的整体结构如图1所示,其主要由驱动控制器、功率驱动单元、直流无刷电机BLDC、轴向柱塞变量泵、单向阀、蓄能器、阻尼旁通阀、溢流阀、作动筒(双作用对称液压缸)等组成。

图1 电动静液作动器位置系统整体结构Fig.1 Overall structure of position system of electric hydrostatic actuator
系统工作时,将从上位机获取位置指令,与实际位置反馈值做差,得到位置偏差值,驱动控制器进行运算后输出相应控制信号,电机在控制信号作用下带动柱塞泵输出不同大小的流量,进而使得液压缸活塞杆的位置发生改变,实现作动器位置系统的精确控制[2]。
电动静液作动器位置系统由3个闭环构成,从外向内分别为位置控制环、速度控制环、电流控制环。三环控制原理如图2所示。
2 系统模型建立及特性分析
为了便于分析,将一些对系统影响较小的因素不予考虑,做如下假设:①电机模型为理想线性模型;②油液黏度和体积弹性模量均为常数;③管道压力损失、流体质量影响及管路动态在建模时不予考虑。
根据系统的控制原理,在AMESim中分别对系统各个环节进行建模,然后联立各个环节,最终进行系统建模,如图3所示[3]。
通过查阅相关硬件的技术手册,以及现场试验数据,确定了模型参数。模型参数及其取值如下:
R为BLDC定子绕组电阻,R=0.245 Ω;
L为BLDC定子绕组电感,L=3.36×10-4H;
Cm为BLDC电磁转矩系数,Cm=0.215 N·m/A;
Ce为 BLDC 反电势系数,Ce=0.215 V·s/rad;
J 为电机-泵转动惯量,J=1.6×10-3kg·m2;
B 为电机-泵阻尼系数,B=6.0×10-4N·m·s/rad;
Cip为泵内泄漏系数,Cip=2.0×10-12m3/(s·Pa);
Cep为泵外泄漏系数,Cep=0.5×10-12m3/(s·Pa);
A为作动筒活塞有效面积,A=1.83×10-3m2;
V为系统容腔总容积,V=3.0×10-4m3;
Cig为作动筒内泄漏系数,Cig=2.0×10-12m3/(s·Pa);
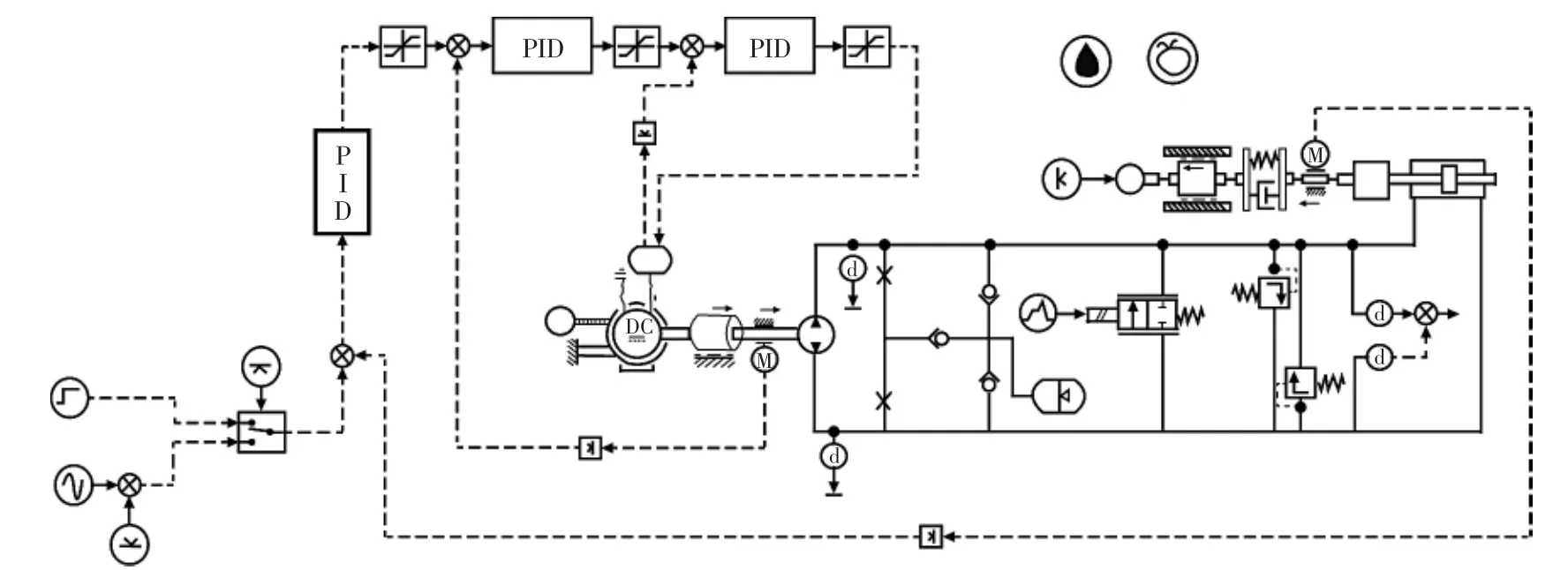
图3 电动静液作动器位置系统建模Fig.3 Modeling of position system of electric hydrostatic actuator
Ceg为作动筒外泄漏系数,Ceg=0.5×10-12m3/(s·Pa);
Ey为液压油体积弹性模量,Ey=6.86×10-8N/m2;
Bt为活塞及负载的阻尼系数,Bt=100 N·s/m;
Kt为负载弹簧刚度,Kt=5×10-8N/m;
mt为活塞及负载的惯性质量,mt=30 kg;
Z为泵柱塞数,Z=9个;
Fz为泵柱塞橫截面积,Fz=3.85×10-5m2;
mz为泵柱塞质量,mz=3.5×10-3kg;
α为斜盘转轴与缸体轴线之间的径向间距,α=3.3×10-4m;
Rf为泵柱塞回转半径,Rf=1.3×10-2m。
将上述模型参数带入模型中进行仿真。在优先满足快速的原则下,不断修正PID参数进行仿真,直至系统响应曲线达到最佳。系统在输入指令为5 mm阶跃信号的条件下得到的仿真曲线如图4所示。

图4 电动静液作动器位置系统动态响应曲线Fig.4 Dynamic response curve of position system of electric hydrostatic actuator
根据需求,系统需满足以下控制要求:伺服机构行程的绝对值≮50 mm;阶跃响应的上升时间≯0.19 s;在全行程内阶跃响应超调量<5%。
从响应曲线来看,系统阶跃响应的上升时间为0.223 s,未超调量。表明系统阻尼比较大,相对稳定性高,但是快速性还有带提高,单纯的PID控制不能满足项目需求。
3 模糊PID控制器的设计
模糊控制器可用于数学模型复杂多变或者精确数学模型不易获得的系统,同时具有响应快、鲁棒性好、可满足多变载荷等特点。传统PID控制器算法简单、稳定性好、可靠性高,但适用范围较小。将模糊控制和PID控制相结合,可以根据不同情况,完成对PID参数的不断在线调整,充分发挥这2种算法的优势,提高系统的控制效果[4]。
根据采样计算得到的误差和误差变化率,运用经验得到的模糊推理规则,建立比例系数、微分系数、积分系数模糊控制规则表,达到实时在线调整的效果。模糊PID控制器结构如图5所示。
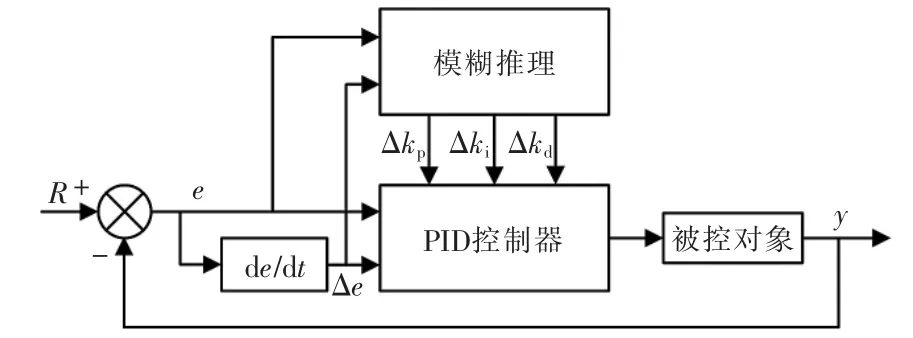
图5 模糊PID控制器结构Fig.5 Fuzzy PID controller structure
由图可见,模糊PID控制器的设计总体分为两大部分,模糊控制器设计和PID控制器设计。针对该位置系统,图中e,Δe为位置偏差和位置偏差的变化率;Δkp,Δki,Δkd为经过模糊推理后的输出量。系统运行中,当偏差和偏差变化率发生变化时,根据模糊控制规则,输出量也随之调整,最终根据规则(1)调整 PID参数值,即

式中:kp′,ki′,kd′为初始参数。
3.1 模糊控制器设计
一个基本模糊控制器主要有3个部分:
模糊化 把精确量 (如偏差e和偏差变化Δe)转化为相应的模糊量(E和ΔE);
模糊推理 按总结的语言规则(模糊控制规则表)进行模糊推理;
模糊判决 把推理结果从模糊量转化为可以用于实际控制的精确量 Δkp,Δki,Δkd。
定义 E和 ΔE模糊量的子集为{NB,NM,NS,ZO,PS,PM,PB},模糊论域为[-6,6];kp,ki,kd模糊量子集为{NB,NM,NS,ZO,PS,PM,PB},论域分别为[-10,10],[-0.5,0.5],[-1,1],各模糊子集均选用三角形隶属函数。其具有形状简单、响应灵敏、鲁棒性强等优点。
在Matlab环境中输入Fuzzy,即可调出模糊控制系统呢编辑器的交互界面,如图6所示。它提供了对模糊系统的高层属性的编辑、修改功能,这些属性包括输入、输出语言变量的个数和去模糊化方法等。
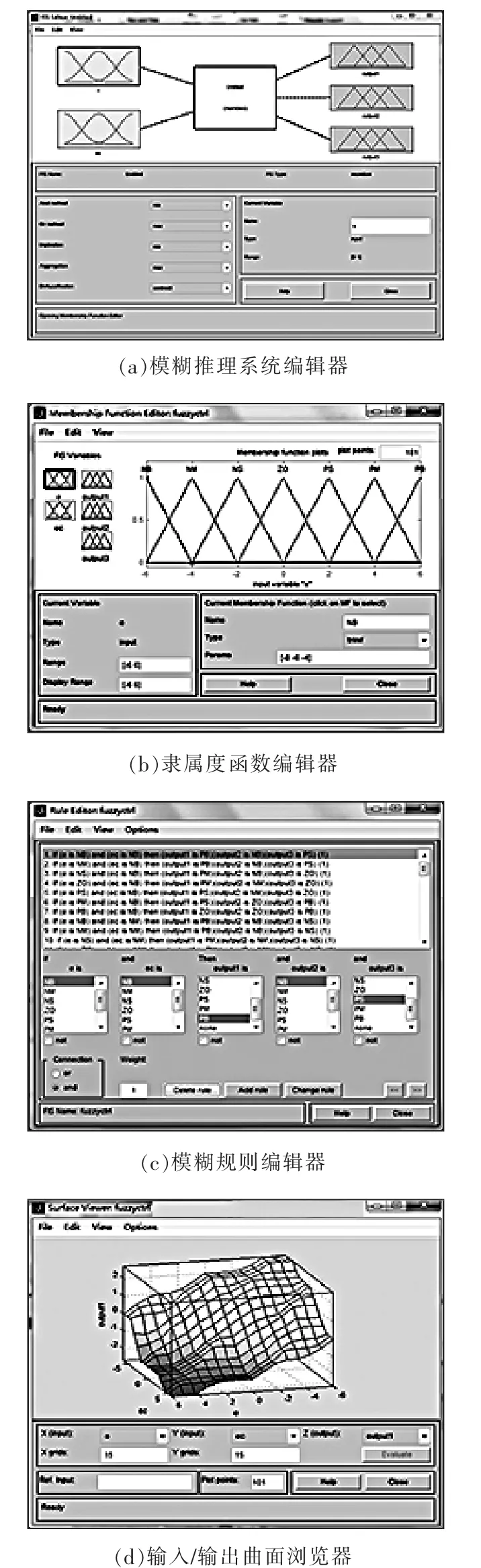
图6 模糊控制器相关编辑器Fig.6 Fuzzy controller related editor
3.2 模糊控制规则和模糊推理
通过人工调试,结合理论分析,可以归纳出偏差e,偏差变化率Δe与PID调节器的3个参数kp,ki,kd存在以下关系:
(1)当位置偏差较大时,需要加快系统的响应速度,所以选取较大的kp值,但是过大的kp数值会导致系统不稳定。为避免系统在开始时可能引起的范围控制作用,应选取较小的kd,以便加快系统响应;为避免积分饱和,可以先去掉积分作用,取ki=0。
(2)当位置偏差处于中等大小时,为使系统的响应超调量降低一些,需要选择较小的kp。此时,为保证系统的响应速度,kd值的选择比较重要,故应谨慎选取。积分作用在此时也可加入一些,但ki的数值不宜过大。
(3)当位置偏差较小时,系统逐渐达到稳态,为了使系统具有较好的稳态性能,可以选取较大的kp和ki。为了避免系统在平衡点出现振荡,kd的取值应恰当。
由上述经验和实际操作,考虑偏差变化率Δe的影响,综合得出模糊控制规则[5],见表1。

表1 模糊控制规则Tab.1 Fuzzy control rule
3.3 整体模型的模糊PID仿真及分析
在Matlab/Simulink工具箱中,根据模糊PID控制器结构图以及PID参数值调整规则,搭建模糊PID控制器模块,如图7所示。模糊控制的模糊化、清晰化和模糊控制规则等均封装在Fuzzy Logic Controler中[6]。

图7 模糊PID控制器模块Fig.7 Fuzzy PID controller modules
为使系统更为简洁,将模糊PID控制器模块封装为Fuzzy-PID模块。调用Simulink中的AMESim Interfaces选项卡,添加AME2SLCoSim,并完成线路连接,在Matlab中联合仿真模型如图8所示。图中,左侧方框代表AMESim中所有元件的封装,input,output,feedback的3个接口可以与Simulink中的元件进行连接。
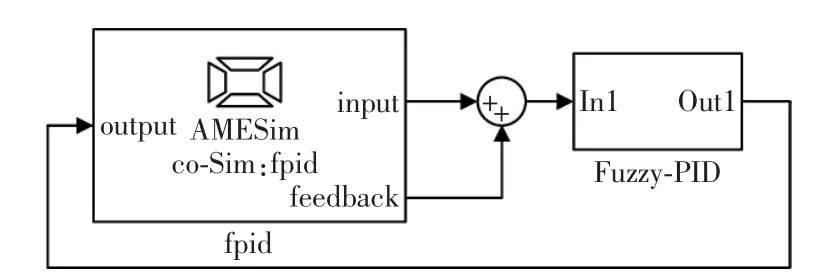
图8 Simulink中联仿接口Fig.8 Co-simulation interface in Simulink
在AMESim中联合仿真模型如图9所示。图中,左侧方框代表Simulink中所有元件的封装,input,output,feedback 的 3 个接口可以与 AMESim中的元件进行链接。
在输入指令为5 mm的阶跃位移条件下对系统进行了仿真,得到了如图10所示的仿真结果。由仿真曲线可见,常规PID控制策略控制下,系统位移量的上升时间为0.223 s,无超调量;应用模糊PID控制策略后,系统位移量的上升时间为0.175 s,无超调量。
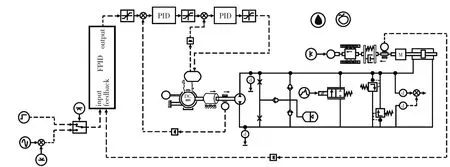
图9 整体联仿模型及AMESim中联仿接口Fig.9 Overall simulation model and the co-simulation interface in AMESim
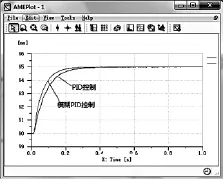
图10 动态响应曲线对比Fig.10 Comparison of dynamic response curves
对比可见,在模糊PID控制策略下,系统的阶跃响应上升时间提高了21.5%,快速性得到了改善,满足项目的需求指标。
4 结语
针对电动静液作动器的位置控制系统进行了研究,详细说明了系统的工作原理,并利用Simulink和AMESim软件进行了模型搭建,仿真分析了系统特性。根据系统特性和项目要求,提出了模糊PID的控制方法,通过该方法使得系统性能得到了改善,满足了项目使用需求。
参考文献:
[1] 李杨,周洁敏.电动静液作动器的建模与仿真[J].南昌航空大学学报:自然科学版,2014,28(3):38-44.
[2] 齐海涛,付永领.基于AMESim的电动静液作动器的仿真分析[J].机床与液压,2007,35(3):184-186.
[3] 付永领,祁晓野.AMESim系统建模和仿真:从入门到精通[M].北京:北京航空航天大学出版社,2006.
[4] 王广怀,周传海,吕萍,等.模糊PID控制器在直驱式电液伺服系统中的应用[J].机床与液压,2010,38(21):85-87.
[5] 石辛民,郝整清.模糊控制及其MatLab仿真[M].北京:清华大学出版社,2008.
[6] Yu L K,Zheng J M,Yuan Q L,et al.Fuzzy PID control for direct drive electro-hydraulic position servo system[C]//International Conferce on Consumer Electronics,Communications and Networks.IEEE,2011:370-373.
猜你喜欢
黑龙江大学自然科学学报(2021年4期)2021-11-19 07:05:06
小资CHIC!ELEGANCE(2021年45期)2021-01-11 03:51:12
中学生数理化·八年级物理人教版(2019年9期)2019-11-25 07:33:00
新世纪智能(高一语文)(2019年4期)2019-06-25 10:06:36
天津教育·下(2018年9期)2018-07-13 08:25:47
北京航空航天大学学报(2017年1期)2017-11-24 05:22:16
西南交通大学学报(2016年3期)2016-06-15 20:29:35
电子制作(2016年21期)2016-05-17 03:53:01
通信电源技术(2016年5期)2016-03-22 01:09:57
电源技术(2015年11期)2015-08-22 08:50:38