基于折扣高斯粒子滤波器的桥梁可靠性动态预测
2018-05-04 02:26刘月飞樊学平
同济大学学报(自然科学版) 2018年3期
刘月飞, 樊学平
(1. 兰州大学 西部灾害与环境力学教育部重点实验室, 甘肃 兰州 730000;2. 兰州大学 土木工程与力学学院, 甘肃 兰州 730000)
桥梁健康监测(BHM)是保障桥梁结构安全的重要技术,通常包括数据采集和监测数据的合理应用两方面内容.数据采集方面主要包括监测系统组装技术[1]、数据压缩[2-3]和数据恢复[4]方法等,目前已处于相对成熟阶段.监测数据处理主要集中在模态分析、损伤识别、损伤评估、可靠性评估以及模型修正等领域[5-9],目前研究结果仍难以有效预测结构的动态可靠性.因此如何有效利用BHM信息预测结构可靠性仍是BHM领域备受关注的研究难点.
考虑到桥梁有限元建模和模型更新的复杂性和困难性,采用无需模型的分析方法逐渐成为BHM领域的研究趋势.基于实际监测数据,采用无需模型的分析方法预测桥梁的动态可靠性已取得一些研究成果.Frangopol等[10-11]提出了基于监测极值的桥梁性能的可靠性预测方法,并与同年提出了基于贝叶斯更新的桥梁可靠性预测方法,两种方法分析过程中分别采用一次回归函数和常值函数进行可靠性预测,均未考虑监测变量的动态随机性.赵卓[12]采用自回归滑动平均(ARMA)模型动态预测了长春伊通河桥构件的荷载效应(挠度、加速度以及索力等),并基于此进行了可靠性评估,分析过程中亦未考虑监测变量的动态随机性,且存在模型长期预测精度不高的问题.樊学平等[13-16]利用BHM数据,研究了基于贝叶斯动态线性模型和贝叶斯动态非线性模型的桥梁构件可靠性动态预测方法,分析过程中将非线性模型近似转化为线性模型来处理,但贝叶斯动态线性模型存在对状态方程和观测方程依赖性高的问题,对此,樊学平等进一步研究了基于高斯粒子滤波器的桥梁构件可靠性动态预测方法,在分析过程中,虽然解决了对状态空间模型依赖性强的问题,但又存在高斯粒子滤波器重要性函数的合理选择问题,于是又进行了桥梁极值应力的改进高斯混合粒子滤波器预测算法研究,但分析过程中存在如何使动态线性模型合理简单化和折扣因子如何选择的问题.
综上所述,考虑到贝叶斯动态线性模型和高斯粒子滤波器中动态模型的复杂性,本文作者经过研究发现以下问题需要解决:①如何确定合理的折扣因子和建立监测数据简单可行的动态模型;② 如何基于折扣高斯粒子滤波器算法和BHM数据建立桥梁动态可靠性预测方法.
鉴于上述问题,本文研究了折扣高斯粒子滤波器和BHM数据相结合的桥梁构件动态可靠性预测方法,具体研究步骤为:①以在役BHM系统历史监测的大量日常极值应力信息为一个时间序列,建立极值应力的折扣动态线性模型;②基于建立的动态线性模型和实时监测数据,结合高斯粒子滤波器算法不断动态预测极值应力信息,给出影响预测精度的合理折扣因子区间和最优折扣高斯粒子滤波器预测算法;③研究最优折扣高斯粒子滤波器算法和一次二阶矩(FOSM)可靠性方法相结合的桥梁动态可靠性预测方法,并通过实际桥梁的监测数据验证所提方法的合理性和适用性.
1 桥梁日常监测极值应力的动态线性模型
动态线性模型由线性观测方程、线性状态方程以及初始状态信息3部分组成.状态方程反映了监测变量和系统随时间变化的水平,观测方程反映了监测变量和状态变量之间的关系.本文主要通过桥梁历史日常监测极值应力数据建立动态线性模型,如图1所示.
1.1 状态方程的建立
由图1可知,状态方程可以由初始状态信息得到,如图2所示.

图1 动态线性模型的建立Fig.1 Building of dynamic linear model
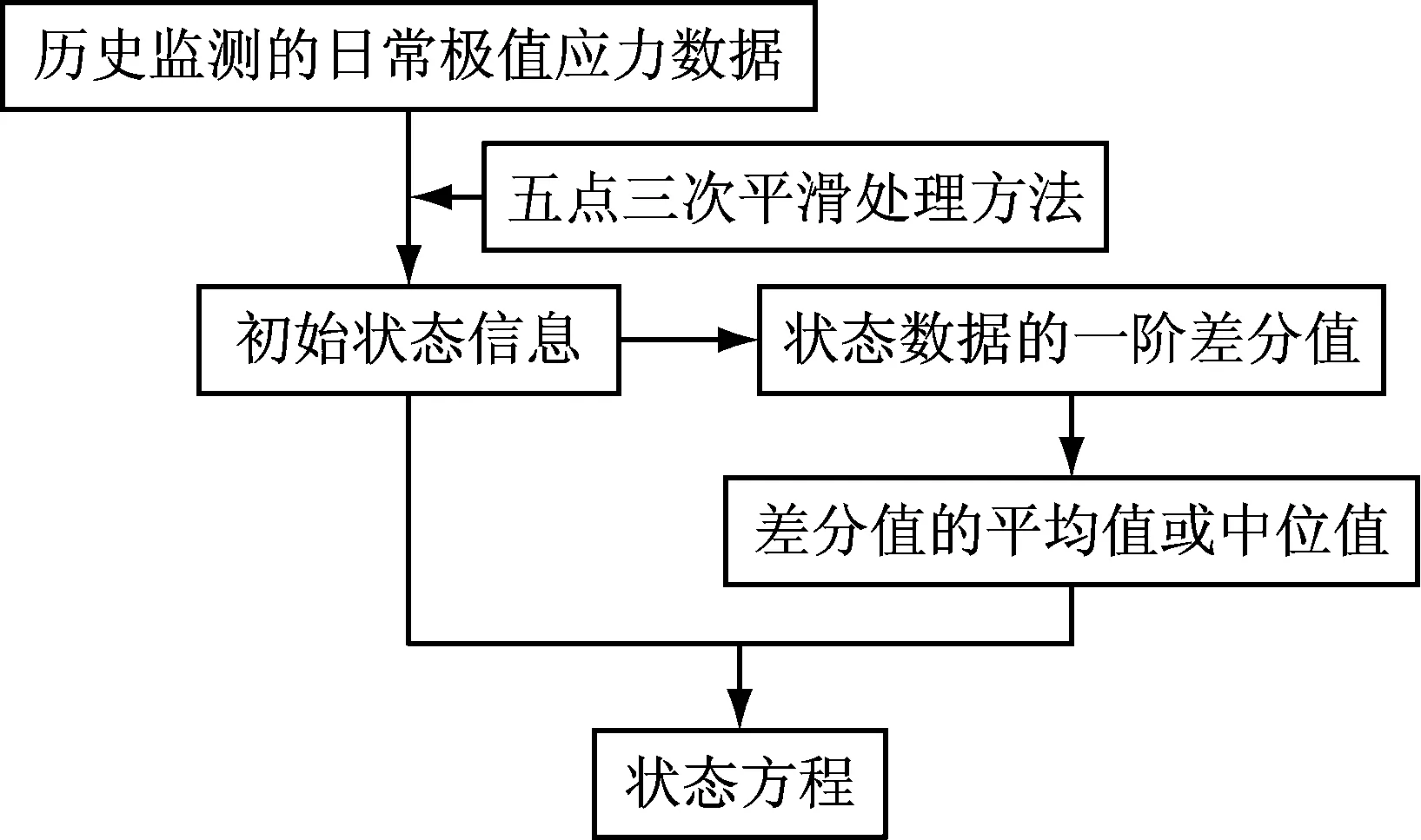
图2 状态方程的建立Fig.2 Building of state equation
状态方程的详细建立步骤如下:
(1)利用五点三次平滑处理方法[12],对历史监测日常极值应力数据进行重采样,近似得到初始状态数据.
(2)对初始状态数据进行一阶差分处理,差分值的平均值或中位值作为初始状态的平均变化水平.
(3)利用所得的状态值和差分值,建立状态方程.
基于图2和详细建立步骤,所建立的状态方程为
θt+1=θt+E(Δt)(或M(Δt))+ωt,
ωt~N(0,Wt)
(1)
式中:θt为t时刻的状态值;Δt为t时刻及以前的状态数据差分集合;E(Δt)和M(Δt)分别为Δt的平均值和中位值;N(·)为高斯概率密度函数;ωt为t时刻的状态误差;Wt为状态误差的方差.
1.2 观测方程的建立
观测方程可以用监测数据和状态变量来表示,考虑到监测极值数据的不确定性和随机性,建立的观测方程为
yt+1=θt+1+νt+1,νt+1~N(0,Vt+1)
(2)
式中:yt+1为t+1时刻的监测值;νt+1为监测误差,且服从方差为Vt+1的正态分布.
基于1.1节和1.2节,本文建立的动态线性模型如下:
观测方程为
yt+1=θt+1+νt+1,νt+1~N(0,Vt+1)
(3)
状态方程为
θt+1=θt+E(Δt)(或M(Δt))+ωt,
ωt~N(0,Wt)
(4)
初始状态信息为
θt|Dt~N(θt|mt,Ct,Dt)
(5)
式中:mt为点估计得到的θt的平均值;Ct为θt的方差;Dt为t时刻及以前的监测数据集,即Dt={yt,Dt-1}.
动态线性模型中,θt、νt+1以及ωt+1之间相互独立,且各自独立.
1.3 动态线性模型中主要概率参数的确定
动态线性模型中需要确定的主要概率参数包括Vt+1、Wt+1、mt和Ct,这些参数的确定方法如下:
Vt+1可以通过θt+1和yt+1之间差值的方差近似估计得到.由文献[13,17-18]可知,Wt+1可利用折扣因子近似表达,即
(6)
式中:δ是折扣因子.为了提高动态线性模型的预测精度,将在下文详细讨论确定合理的折扣因子预测值及区间.
mt和Ct可由t时刻及以前监测值的重采样数据近似估计得到[16].
相对于文献[16]所建立的非线性动态模型,本文建立的动态线性模型(主要包括线性观测方程和线性状态方程)更简化,而且建模过程更详实.
2 高斯粒子滤波器及概率递推过程
考虑到卡尔曼滤波器离线预测、短期预测以及预测精度不高的局限性[13],本文基于所建立的折扣动态线性模型,采用高斯粒子滤波器[19-20]在线动态预测日常极值应力,概率模拟递推流程框图如图3所示.
动态线性模型相关的理论概率递推过程可参考文献[16],如式(7)~(9)所示.
θt+1的先验概率分布函数为
(7)
一步向前预测分布函数为
(8)

图3 基于高斯粒子滤波器的概率模拟递推过程Fig.3 Probability recursive processes basedon Gaussian particle filter
利用Bayes方法,结合式(7)、式(8),可得θt+1的后验分布函数为
(9)
结合式(7)~(9),利用高斯粒子滤波器,在线粒子模拟预测详细过程如下:
(1)p(θt+1|Dt+1)的粒子模拟递推

Step 2 当获得新的监测值yt+1时,计算每个粒子的权重.
(10)

(11)
Step 3 权重的标准化.
(12)

(13)

(14)
(2)p(θt+2|Dt+1)的粒子模拟递推
Step 3 利用式(15)和式(16),可以得到p(θt+2|Dt+1)的概率统计参数(平均值和方差).
(15)

(16)
(3)p(yt+2|Dt+1)的粒子模拟递推
Step 3 利用式(17)和式(18),可以得到p(yt+2|Dt+1)的平均值和方差,即
(17)

(18)
第(1)步至第(3)步在时变监测数据下,不断地循环模拟递推即可实现图3所示的基于高斯粒子滤波器的概率模拟递推过程.
相对于文献[16]所建立的非线性动态模型而言,本文建立的动态线性模型概率递推过程更简化,更有利于BHM大量数据的不断修正.
3 基于折扣高斯粒子滤波器的桥梁构件可靠性动态预测算例分析
3.1 基于折扣高斯粒子滤波器的桥梁构件极值荷载效应动态预测
美国I-39北桥建于1961年,是一座五跨连续钢板梁桥,总长度为188.81 m.桥梁监测项目包括结构特定构件的应力和应变评估等[10-11,13, 21].关于检测项目的详细内容和目的,参见文献[21].此项目对横向第二跨钢板的跨中梁底极值应力进行了83 d的监测,由文献[10-11,13-14,16]可知,这些监测数据可以反应桥梁结构响应的变化趋势.
83 d的监测数据只考虑了由车辆荷载、温度荷载、收缩徐变和结构变化引起的应力的变异性,由钢板和混凝土恒载引起的应力信息不包括在内.现利用前60 d的监测极值应力数据,建立极值应力的动态线性模型.
基于图1、图2以及式(1)~(5),建立动态线性模型.
观测方程为
yt+1=θt+1+νt+1,νt+1~N(0,21.48)
(19)
状态方程为
θt+1=θt+0.010 6+ωt,
ωt~N(0,Wt)
(20)
初始状态信息为
θt|Dt~p(θt|Dt)≈N(25.17,23.50)
(21)

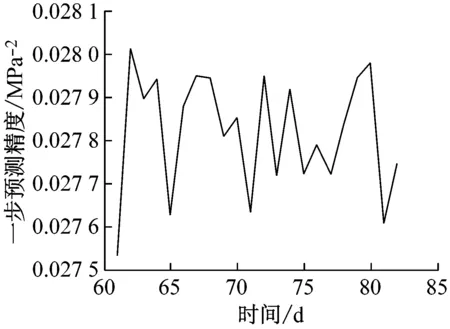
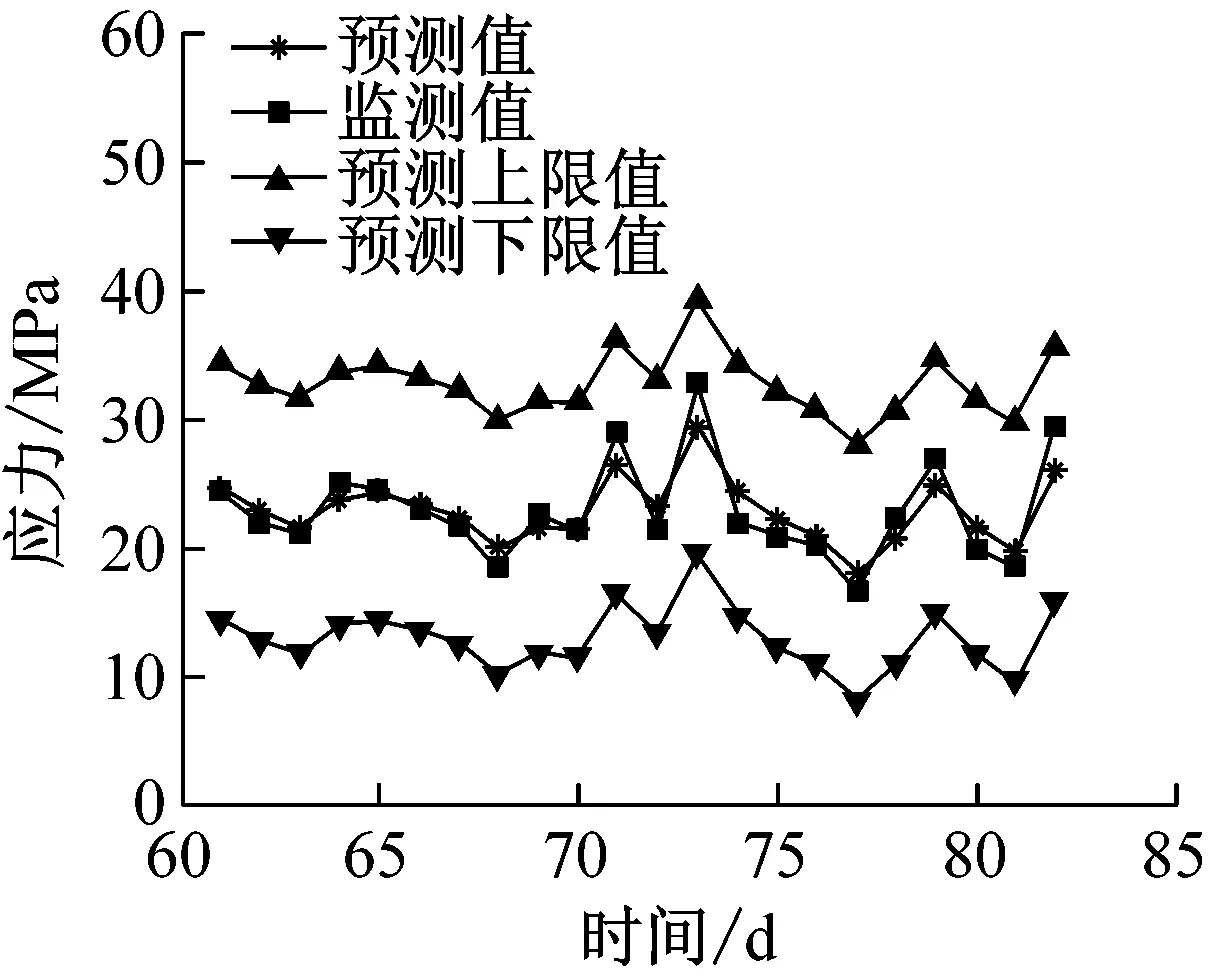
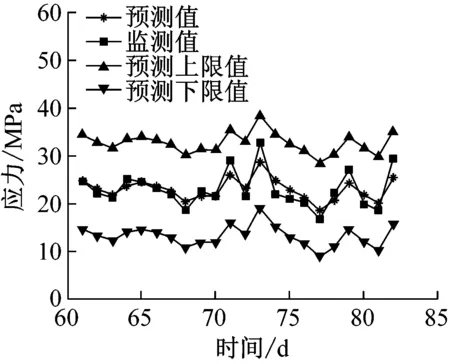
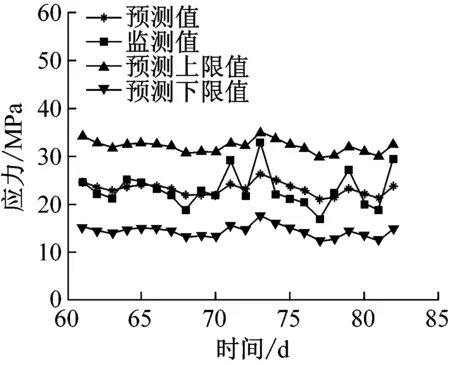
基于所建立的动态线性模型(见式(19)~(21)),采用高斯粒子滤波器(见式(7)~(18)),利用不同的折扣因子(变化范围为0.18~0.98),动态预测了后23 d(第61天到第83天)的极值应力.预测结果见图4~13.
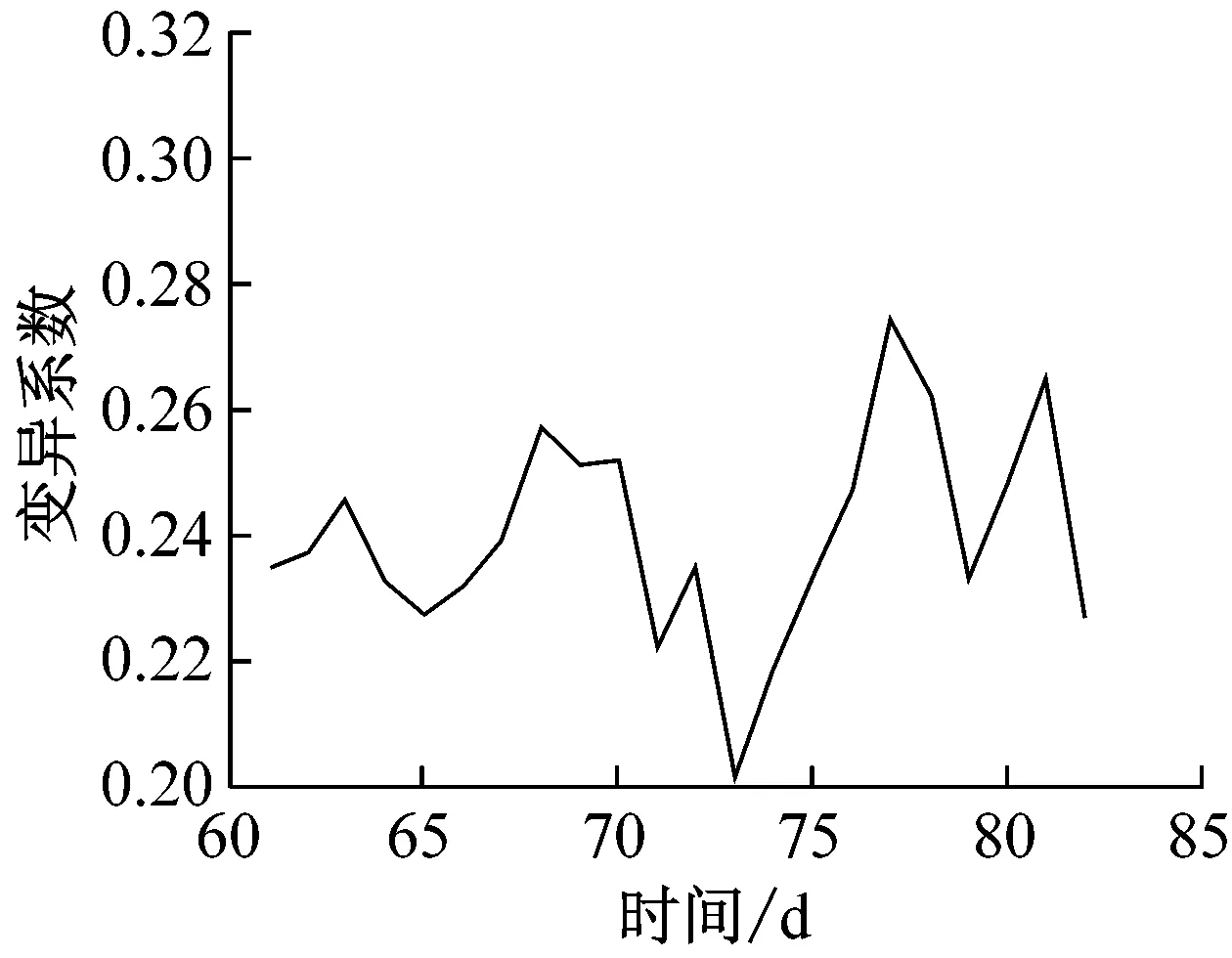
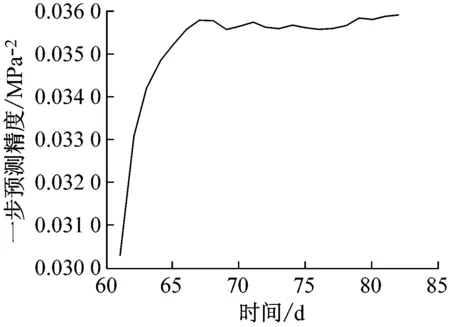
本文通过预测精度、预测变异系数以及均方根误差(反应所有预测数据的精密程度)3个指标来确定折扣因子的合理区间.由图4~13可知3个指标的预测变化规律为:
(1)从图4a~13a可以看出,预测的极值应力及其范围和监测的极值应力基本保持一致.但从图14可以看出,预测值的均方根误差(RMSE)随着折扣因子的增加而增加,所以应取较小的折扣因子.
(2)从图4b~13b可以看出,折扣高斯粒子滤波器的预测精度(预测方差的倒数)随着折扣因子的增大而增大,所以建议取较大的折扣因子.
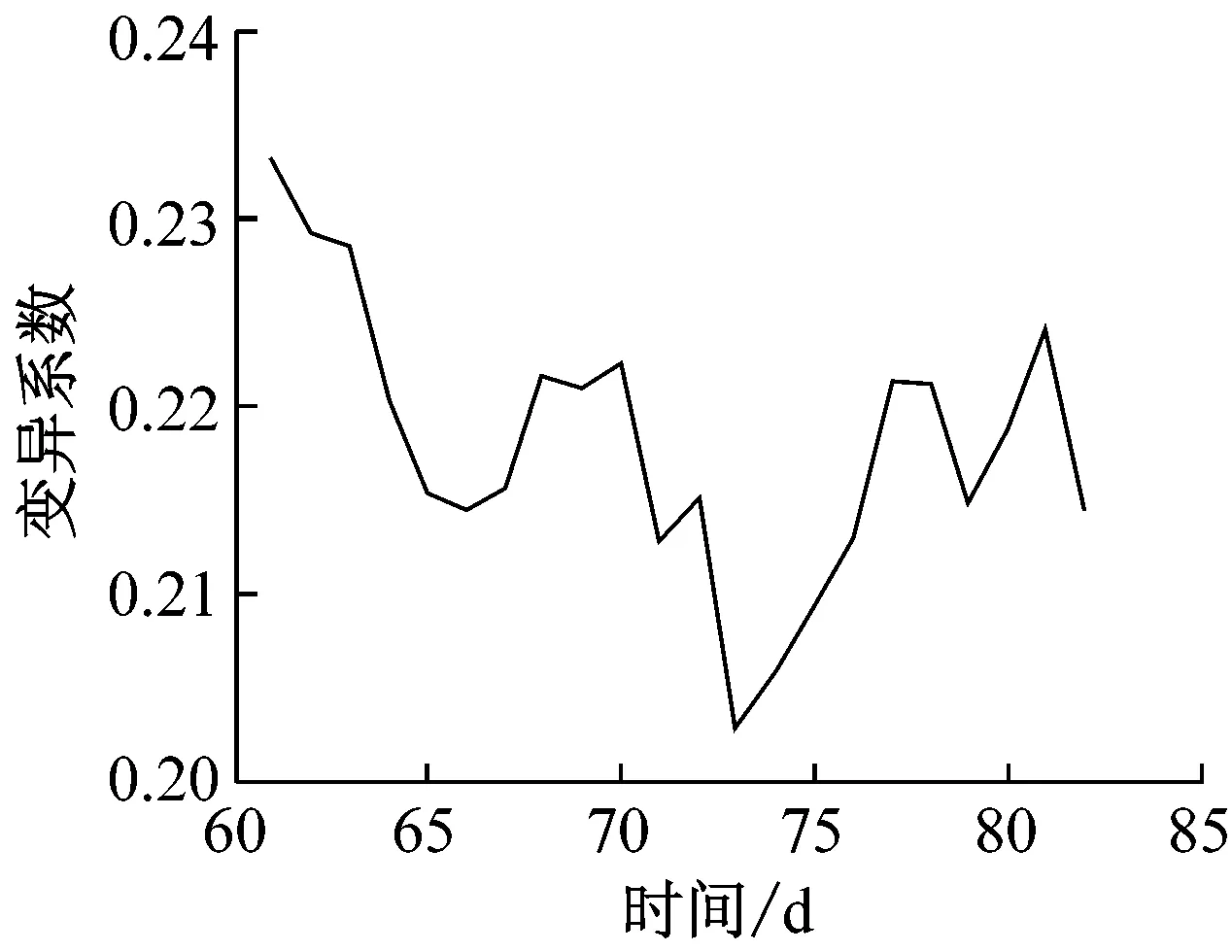
(3)从图4c~13c可以看出,预测值的变异系数随着折扣因子的增大而减小,由于变异系数可以反映预测值与监测值的离散程度,所以建议取较大的折扣因子.
从上面的预测规律可以看出,折扣因子对极值应力的预测有很明显的影响.为全面考虑预测值的精度、变异系数以及均方根误差对预测数据的影响规律,本文作者建议利用本文建立的折扣高斯粒子滤波器进行极值应力的预测,合理的折扣因子区间为0.48~0.98.
3.2 基于折扣高斯粒子滤波器的桥梁构件可靠性动态预测
对美国I-39北桥第二跨边跨梁中间底部的应力进行了动态监测,该梁的极限状态函数为
g(R,S,C,M)=R-S-C-γMM
(22)
式中:R为钢材屈服强度;S为钢材自重产生的应力;C为混凝土自重产生的应力;M为监测或预测的极值应力;γM为传感器的影响系数.

a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图4 折扣因子为0.18时的预测结果Fig.4 Predicted data at δ=0.18

a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图5 折扣因子为0.28时的预测结果Fig.5 Predicted data at δ=0.28

a 预测和监测的极值应力
b 预测精度

c 预测的变异系数图6 折扣因子为0.38时的预测结果Fig.6 Predicted data at δ=0.38
a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图7 折扣因子为0.48时的预测结果Fig.7 Predicted data at δ=0.48
a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图8 折扣因子为0.58时的预测结果Fig.8 Predicted data at δ=0.58

a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图9 折扣因子为0.68时的预测结果Fig.9 Predicted data at δ=0.68

a 预测和监测的极值应力

b 预测精度
c 预测的变异系数图10 折扣因子为0.78时的预测结果Fig.10 Predicted data at δ=0.78

a 预测和监测的极值应力

b 预测精度

c 预测的变异系数图11 折扣因子为0.88时的预测结果Fig.11 Predicted data at δ=0.88
a 预测和监测的极值应力
b 预测精度

c 预测的变异系数图12 折扣因子为0.90时的预测结果Fig.12 Predicted data at δ=0.90

a 预测和监测的极值应力

b 预测精度
c 预测的变异系数图13 折扣因子为0.98时的预测结果Fig.13 Predicted data at δ=0.98
利用式(22)和FOSM可靠性分析方法[13],预测的可靠指标计算公式为
(23)
式中:μM和σM分别是M的平均值和方差;μR和σR分别是R的平均值和方差;μS和σS分别是S的平均值和方差;μC和σC分别是C的平均值和方差.
监测的可靠指标为
(24)
结合3.1节,采用δ=0.48,利用式(22)~(24)对结构的动态可靠指标进行预测,见图14.
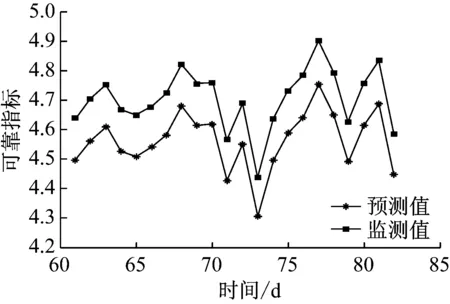
图14 基于δ=0.48预测和监测得到的可靠指标Fig.14 Predicted reliability at δ=0.48
从图14可以看出,预测的可靠指标与监测的可靠指标变化基本一致.但由于考虑到预测极值应力的不确定性和随机性,因而预测值比监测值小,但可以为桥梁的预防性养护维修提供参考依据.
4 结论
本文基于BHM系统采集到的日常极值应力数据,研究了折扣动态线性模型和高斯粒子滤波器相融合的折扣高斯粒子滤波器预测算法,并对结构的可靠指标进行了动态预测分析,取得以下结论:
(1)基于折扣高斯粒子滤波算法预测的极值应力与监测得到的极值应力近似相等(见图4a~13a).
(2) 给出了本文所提预测算法合理的折扣因子区间为0.48~0.98.基于监测极值应力数据的不断修正,折扣高斯粒子滤波器算法的预测精度越来越好(见图7b~13b).
(3)基于本文提出的折扣高斯粒子滤波器预测算法,并结合FOSM预测得到的可靠指标比实测的值较小(见图15),主要是预测分析时考虑了预测值的不确定性和随机性.但预测得到的可靠指标对桥梁的预防性养护维修决策可以提供一定的参考依据.
本文提出的折扣高斯粒子预测算法仅通过本文提出的折扣动态线性模型和高斯粒子滤波算法相融合建立.为降低它的局限性,对更一般的折扣高斯粒子预测算法有待进一步研究.
参考文献:
[1] 李惠, 周文松, 欧进萍, 等. 大型桥梁结构智能健康监测系统集成技术研究[J]. 土木工程学报, 2006, 39(2): 46.
LI Hui, ZHOU Wensong, OU Jinping,etal. A study on system integration technique of intelligent monitoring systems for soundness of long-span bridges[J]. China Civil Engineering Journal, 2006, 39(2): 46.
[2] BAO Y Q, BECK J L, LI H. Compressive sampling for accelerometer signals in structural health monitoring[J]. Structural Health Monitoring, 2011, 10(3): 235.
[3] ZHANG Y F, LI J. Wavelet-based vibration sensor data compression technique for civil infrastructure condition monitoring[J]. Journal of Computing in Civil Engineering, 2006, 20(6): 390.
[4] TROPP J A, GILBERT A C. Signal recovery from random measurements via orthogonal matching pursuit[J]. IEEE Transactions on Information Theory, 2007, 53(12): 4655.
[5] 李顺龙. 基于健康监测技术的桥梁结构状态评估和预警方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2009.
LI Shunlong. Approached of condition assessment and damage alarming of bridges based on structural health monitoring[D]. Harbin: Harbin Institute of Technology, 2009
[6] 宗周红, 钟儒勉, 郑沛娟, 等. 基于健康监测的桥梁结构损伤预后和安全预后研究进展及挑战[J]. 中国公路学报, 2014, 27(12), 46.
ZONG Zhouhong, ZHONG Rumian, ZHENG Peijuan,etal. Damage and safety prognosis of bridge structures based on structural health monitoring: progress and challenges[J]. China Journal of Highway and Transport, 2014, 27(12): 46.
[7] 魏锦辉, 任伟新. 基于响应面方法的桥梁静动力有限元模型修正[J]. 公路交通科技, 2015, 32(2): 68.
WEI Jinhui, REN Weixin. Static and dynamic bridge finite element model updating based on response surface method[J]. Journal of Highway and Transportation Reasearch and Development, 2015, 32(2): 68.
[8] 焦美菊, 孙利民, 李清富. 基于监测数据的桥梁结构可靠度评估[J]. 同济大学学报(自然科学版), 2011, 39(10): 1452.
JIAO Meiju, SUN Limin, LI Qingfu. Bridge structural reliability assessment based on health monitoring data[J]. Journal of Tongji University (Natural Science), 2011, 39(10):1452
[9] FRANGOPOL D M, STRAUSS A, KIM S Y. Bridge reliability assessment based on monitoring[J]. Journal of Bridge
Engineering, 2008, 13(3): 258
[10] FRANGOPOL D M, STRAUSS A, KIM S Y. Use of monitoring extreme data for the performance prediction of structures: general approach [J]. Engineering Structures, 2008, 30: 3644.
[11] STRAUSS A, FRANGOPOL D M, KIM S Y. Use of monitoring extreme data for the performance prediction of structures: Bayesian updating [J]. Engineering Structures, 2008, 30: 3654.
[12] 赵卓. 基于ARMA模型的伊通河桥监测数据建模与可靠度分析[D]. 哈尔滨: 哈尔滨工业大学, 2012.
ZHAO Zhuo. Health monitoring data modeling and reliability analysis for Yitong river bridge based on ARMA model[D]. Harbin: Harbin Institute of Technology, 2012.
[13] 樊学平. 基于验证荷载和监测数据的桥梁可靠性修正与贝叶斯预测[D]. 哈尔滨: 哈尔滨工业大学, 2014.
FAN Xueping. Bridge reliability updating and Bayesian prediction based on proof loads and monitored data[D]. Harbin: Harbin Institute of Technology, 2014.
[14] 樊学平, 刘月飞, 吕大刚. 桥梁监测数据的动态线性建模与可靠性预测[J]. 同济大学学报(自然科学版), 2016, 44(7): 1002.
FAN Xueping, LIU Yuefei, LV Dagang. Dynamic linear modeling of bridge monitored data and reliability prediction[J]. Journal of Tongji University(Natural Science), 2016, 44(7): 1002.
[15] 樊学平, 刘月飞, 吕大刚. 应用高斯粒子滤波器的桥梁可靠性在线预测[J]. 哈尔滨工业大学学报, 2016, 48(6): 164.
FAN Xueping, LIU Yuefei, LV Dagang. On-line reliability prediction of bridges based on Gaussian particle filter[J]. Journal of Harbin Institute of Technology, 2016, 48(6): 164.
[16] 樊学平, 刘月飞, 吕大刚. 桥梁极值应力的改进高斯混合粒子滤波器动态预测[J]. 同济大学学报(自然科学版), 2016, 44(11): 1660.
FAN Xueping, LIU Yuefei, LV Dagang. Improved Gausian mixed particle filter dynamic prediction of bridge monitored extreme stress[J]. Journal of Tongji University(Natural Science), 2016, 44(11): 1660.
[17] WEST M, HARRISON J. Bayesian forecasting and dynamic models[M]. 2nd ed. New York: Springer Series, 1997.
[18] PETRIS G, PETRONE S, CAMPAGNOLI P. Dynamic linear models with R[M]. New York: Springer Series, 2009.
[19] 胡士强, 敬忠良. 粒子滤波原理及其应用[M]. 北京: 科学出版社, 2010.
HU Shiqiang, JING Zhongliang. Particle filtering theory and its application[M]. Beijing: Science Press, 2010.
[20] PENG Y H, LIU Y F, MIU D,etal. Application of Gaussian mixture particle filter on state estimation[J]. Journal of Projectiles Rockets Missiles & Guidance, 2007, 27(1): 271.
[21] MAHMOUD H N, CONNOR R J, BOWMAN C A. Results of the fatigue evaluation and field monitoring of the I-39 Northbound Bridge over the Wisconsin River[R]. Bethlehem: Lehigh University, 2005.
猜你喜欢
新世纪智能(数学备考)(2021年10期)2021-12-21
新世纪智能(数学备考)(2021年10期)2021-12-21
河北理科教学研究(2020年3期)2021-01-04
语数外学习·高中版中旬(2020年10期)2020-09-10
小天使·二年级语数英综合(2019年4期)2019-10-06
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2019年11期)2019-07-04
电子制作(2018年16期)2018-09-26
电子制作(2018年1期)2018-04-04
火控雷达技术(2016年2期)2016-02-06