番茄链式纸钵苗移栽机栽植机构参数优化试验
2018-05-03 06:04:59陈海涛
东北农业大学学报 2018年4期
韩 霞,陈海涛
(1.东北农业大学工程学院,哈尔滨 150030;2.黑龙江八一农垦大学工程学院,黑龙江 大庆 163319)
育苗移栽技术可提高作物生长发育周期单位面积产量[1-3],在作物生产中应用前景广阔。
目前,作物多类型移栽机关键机构试验研究较多[4-6],Numbu等开展甜菜纸钵高速移栽机上纸钵分离装置设计与试验[7],Suzuki等开展卷心菜、生菜等蔬菜自动移栽机移栽试验[8],杨丽等开展玉米纸筒苗移栽机运动轨迹分析与性能试验[9],崔巍在分析西红柿苗物理力学特性及穴盘苗物理形态特征基础上,开展自动移栽机送苗机构试验[10];周福君等为进一步改善玉米钵苗栽植质量,优化移栽机圆盘式栽植机构参数[11]。相关研究主要集中于玉米、棉花、甜菜等作物,链式纸钵育苗番茄移栽方面研究鲜有报道[12-14]。
为此,本研究以链式纸钵苗番茄移栽机构为研究对象,研究其作业质量结构与工作参数组合,探究主要参数对番茄链式纸钵苗移栽机构作业性能影响,为高速番茄链式纸钵苗移栽机开发提供依据。
1 总体结构及工作原理
1.1 链式纸钵结构及原理
通过链式纸钵分离力和破损率试验及测定分析,设计自动移栽链式纸钵,确定育苗用链式纸钵结构及其结合部结构参数优化组合方式,即链式纸钵横截面最优方案为正六边形成册,排列方式为方阵。该结构省去人工供苗和纸钵苗“排队”环节,可提高供苗速度和移栽机作业效率[15]。链式纸钵排列最优方案如图1所示。
1.2 番茄链式纸钵苗移栽试验台结构及原理
番茄链式纸钵苗移栽试验台主要由喂入机构、栽植机构、控制部分和机架四部分组成,如图2所示。其中,喂入机构包括秧苗输送分离装置、秧苗引导装置;栽植机构包括导苗筒、开沟覆土装置等;控制部分包括电磁阀、传感器、电机等。
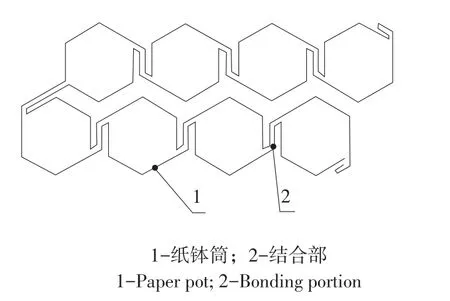
图1 链式纸钵排列最优方案Fig.1 Optimal structure of the chain paper pot's arrangement
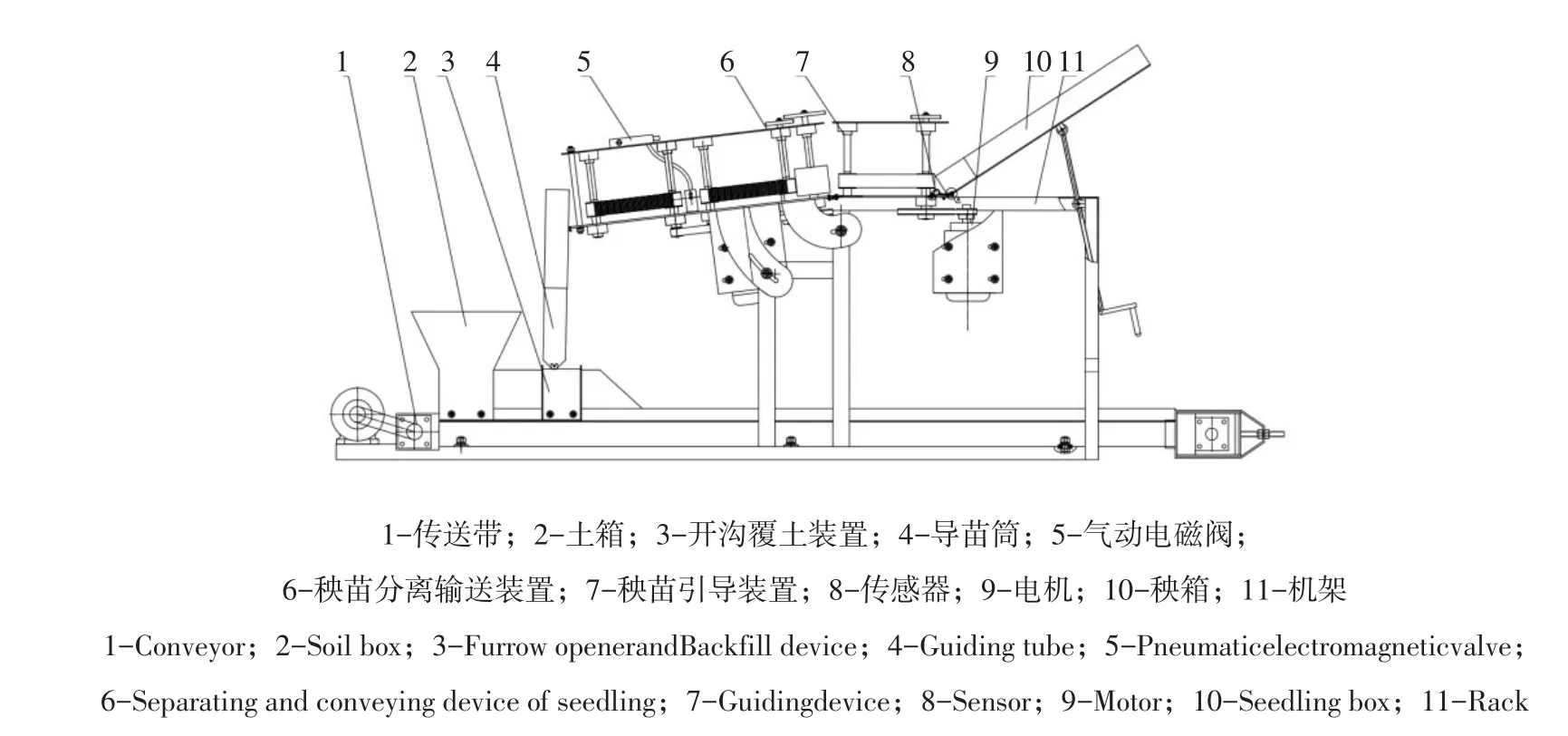
图2 番茄钵苗移栽试验台结构Fig.2 Structure diagram of tomato paper-pot seedling transplanting test-bed
其工作原理是移栽试验开始前,操作者将栽植装置安装在移动土槽上方固定机架上,开沟覆土装置压在土槽土壤中,将一组链式纸钵番茄苗盘预先放在盘架上,使第一排钵苗与位于喂入机构后方引出机构对齐。工作时,电机通过链条驱动传送带,土槽在传送带牵引下向右运动。开沟装置随传送带移动开出栽植沟,钵苗经过引出、输送、分钵完成喂入过程;钵苗经导苗筒下落,最终在覆土装置配合下完成移栽。栽植装置不移动,通过移动土槽运动完成移栽作业,故将移动土槽运动速度作为移栽机作业速度。
1.3 番茄链式纸钵苗移栽过程分析
移栽过程番茄链式纸钵苗主要由3个阶段组成:
①喂苗阶段:该阶段技术难点是分苗,链式纸钵在有序状态下由引出机构导出,在引出机构作用下将钵苗送至分离机构,在分离作用下完成钵苗分离,最后将分离钵苗依次输送至栽植机构[16-17]。
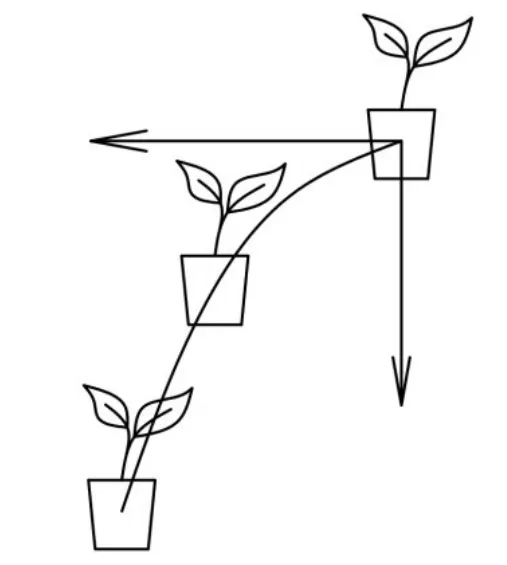
图3 番茄钵苗运动轨迹Fig.3 Trajectory of tomato seedling
2 材料与方法
2.1 材料与仪器设备
试验时间为2017年8月10~12日。钵体内基质含水率18%~30%,育苗基质选取土质肥沃4年以上未施用高残留除草剂地表土,并将地表土过筛,试验纸钵为自行研制链式纸钵,纸筒高度为75 mm,纸筒平均直径为48 mm,秧苗高度158 mm。
番茄钵苗移栽试验台如图4所示。栽植机构与试验台架固定连接,工作过程中栽植机构单体固定,传送带带动土槽移动。按照试验要求,通过传感器传输信号,变频器控制使土槽移动速度控制在合理范围。

图4 移栽试验台Fig.4 Structure of transplanting test-bed
2.2 方法
2.2.1 试验设计
根据前期研究及预试验可知,前进速度(土槽移动速度)、开沟器入土深度、覆土镇压器夹角对直立度合格率和株距变异系数均有较大影响,选取3因素2次正交中心旋转组合试验方法试验[18-20]。试验水平编码如表1所示。

表1 各变量水平编码Table 1 Actual value and code of variable
2.2.2 试验指标测定
秧苗直立度合格率参照(JB/T 10291—2013旱地栽植机械)测定。秧苗直立度合格率指秧苗栽植后直立程度,用秧苗茎杆与地面夹角α评价[11]。根据番茄钵苗移栽农艺要求,α>60°即为合格,钵苗直立度合格率计算公式为:

式中,N1—合格直立株数(株);N—测定总株数(株)。
株距变异系数指栽植区间内测量实际株距标准偏差与平均值百分比,计算公式参照文献[11]。
3 结果与分析
结合表1正交试验因素水平表试验,每组试验重复10次,取其平均值作为试验结果(见表2)。

表2 试验方案与结果Table2 Experiment design and results
3.1 回归模型建立与检验
由表3可知,直立度合格率回归模型极显著(P<0.01),失拟项不显著(P>0.05),说明回归方程拟合效果良好。各因素及其交互作用对钵苗分离率影响显著性为:开沟器入土深度、覆土镇压器夹角影响极显著(P<0.01),前进速度影响显著(P<0.05)。入土深度与覆土镇压器夹角交互作用对指标影响极显著(P<0.01);株距变异系数回归模型极显著(P<0.01),失拟项不显著(P>0.05),说明回归方程拟合效果良好。各因素及其交互作用对钵苗分离率影响显著性为:前进速度、开沟器入土深度影响极显著(P<0.01),覆土镇压器夹角前进速度影响不显著(P>0.05)。前进速度与覆土镇压器夹角交互作用对指标影响显著(P<0.05)。

表3 直立度合格率和株距变异系数方差分析Table 3 Variance analysis of change value of upright degree and coefficients of spacing deviation
将表3中试验数据回归分析,建立回归方程,分析试验因素对试验指标影响。对直立度合格率方差分析结果F检验,剔除不显著项,得到直立度合格率回归模型:

对株距变异系数方差分析结果F检验,剔除不显著项,得株距变异系数回归模型:

3.2 各单因素对指标影响主次分析
利用二次方程系数检验结果,判断试验因素对钵苗分离率指标影响程度。经计算,各因素对指标贡献率如表4所示。

表4 各因素对各项指标贡献率Table 4 Importance of effects offactor on response functions
对钵苗直立度合格率影响主次顺序为:覆土镇压器夹角、开沟器入土深度、前进速度;对株距变异系数影响主次顺序为:前进速度、开沟器入土深度、覆土镇压器夹角。
3.3 各因素对性能指标影响规律分析
3.3.1 交互因素对直立度合格率影响
前进速度和入土深度在其他因素处于0水平时对直立度合格率影响如图5a所示。直立度合格率随前进速度呈先增后减趋势。前进速度为0.76 m·s-1,开沟器入土深度为116 mm时,直立度合格率最大。当开沟器入土深度过深,链式纸钵苗下落时倾斜范围大,覆土推力则引起纸钵苗偏斜,直立度合格率下降。
前进速度和覆土镇压器夹角在其他因素处于0水平时对直立度合格率影响如图5b所示。直立度合格率随覆土镇压器夹角增加呈先增后减趋势。前进速度为0.76 m·s-1,覆土镇压器夹角为43°时,直立度合格率最大。原因为覆土镇压器夹角过大,覆土扶正效果不明显;夹角过小时回土量有限,难以保证钵苗直立栽植。
开沟器入土深度和覆土镇压器夹角在其他因素处于0水平时对直立度合格率影响如图5c所示,直立度合格率随覆土镇压器夹角增加呈先增后减趋势。开沟器入土深度为116 mm,覆土镇压器夹角为43°时,直立度合格率最大。开沟器入土深度对直立度合格率影响原因为直立度合格率受入土深度及覆土镇压器夹角交互作用,入土深度过浅时番茄钵苗移栽时重心不稳定,直立度合格率较低;开沟器入土深度超过适宜范围后,钵苗下落易倾斜,直立度合格率降低。
3.3.2 交互因素对株距变异系数影响
前进速度和入土深度在其他因素处于0水平时对株距变异系数影响如图6a所示。随开沟器入土深度增加,株距变异系数先增后保持不变;随前进速度增加,株距变异系数逐渐增大。因为在栽植间距一定前提下,前进速度决定水平方向位移量,前进速度越快,投苗滞后导致距离偏差越大,株距变异系数增加。
前进速度和覆土镇压器夹角在其他因素处于0水平时对株距变异系数影响如图6b所示。随覆土镇压器夹角逐渐增大,株距变异系数呈先减后增趋势;且随前进速度增大,株距变异系数数值整体增大。因为覆土镇压器夹角过小,壅土量有限,钵苗未得到有效覆土而产生偏移;随覆土夹角增大,壅土量增加,覆土效果改善,株距变化量小;夹角达到适宜范围后,推动大量土壤产生位移和定位误差,钵苗株距不准确。
开沟器入土深度和覆土镇压器夹角在其他因素处于0水平时对株距变异系数影响如图6c所示。随覆土镇压器夹角逐渐增加,株距变异系数呈先减后增趋势。随开沟器入土深度增加,株距变异系数先显著增大后趋于平缓。由于随入土深度增加,钵苗离地高度增大,开沟器回土量增多,钵苗固定位置产生前后移动,株距变异系数大。
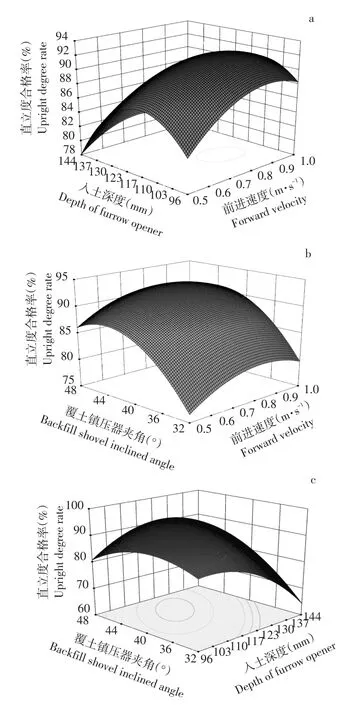
图5 交互作用对直立度合格率影响Fig.5 Effects of two factors on upright degree rate

图6 交互作用对株距变异系数影响Fig.6 Effect of two factors on coefficients of spacing deviation
3.4 参数优化与验证试验
根据番茄链式纸钵苗移栽作业要求,以钵苗直立度合格率最大,株距变异系数最小为优化目标,在前进速度0.33~1.17 m·s-1,开沟器入土深度80~160 mm,覆土镇压器夹角25~54°约束条件下,优化结果如图7所示。当覆土镇压器夹角在40°时,参数优化组合为:前进速度0.6~0.68 m·s-1,开沟深度103~116 mm。
优化结果验证,前进速度为0.65 m·s-1,覆土镇压器夹角为40°,开沟器入土深度为110 mm约束条件下开展10组验证试验,钵苗直立度合格率均值为90.23%,株距变异系数均值为9.84%,满足番茄链式纸钵苗移栽作业要求。
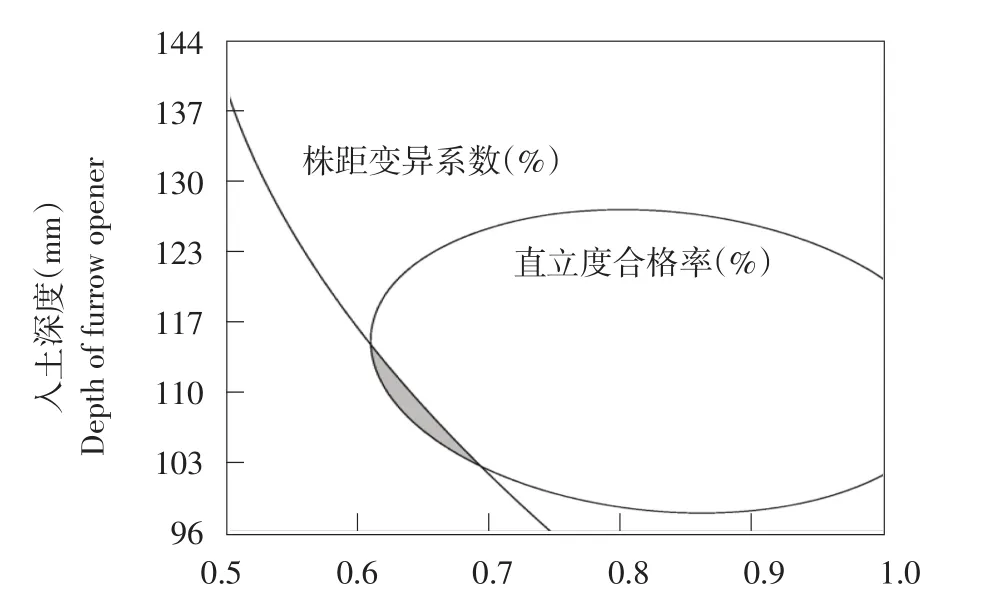
图7 参数优化分析Fig.7 Optimum analysis plot
4 结论
a.设计一种分离辊角度可调差速式番茄链式纸钵苗移栽试验台,各因素对钵苗直立度合格率影响依次为覆土镇压器夹角、开沟器入土深度和前进速度;各因素对株距变异系数影响依次为前进速度、开沟器入土深度和覆土镇压器夹角。
b.在作业速度0.6~0.68 m·s-1,开沟深度103~116 mm,覆土镇压器夹角在40°时,番茄钵苗移栽直立度合格率大于90%,株距变异系数小于10%,满足番茄钵苗移栽技术要求。
[参考文献]
[1] 王君玲,高玉芝,李成华.旱地钵苗移栽机械化生产的现状及发展趋势[J].中国农机化,2003(6):12-14.
[2] Tsuga K.Development of fully automatic vegetable transplanter[J].Japan Agricultural Research Quarterly,2000,34(1):21-28.
[3] 刘亚佳,宋卫堂,封俊,等.夏玉米免耕覆盖移栽机械化技术[J].农业机械学报,2000,31(5):38-40.
[4] 肖卫兵,孙松林.我国烟草移栽机械现状及发展趋势[J].湖南农机,2009,36(1):4-6.
[5] 王永维,唐燕海,王俊,等.蔬菜钵苗高速移栽机吊杯式栽植器参数优化[J].农业机械学报,2016,47(1):91-100.
[6] 何扬清,尹文庆,章士秀.3种旱地移栽机栽植器的性能分析[J].安徽农业科学,2006,34(24):6722-6723.
[7] Numbu T,Miyamoto K,Matsuda K.Development of automatic sugar beet[Beta vulgaris]transplanter using chain pots[J].Jarq,1997,31:249-255.
[8] Gvp K,Raheman H.Development of a walk-behind type hand tractor powered vegetable transplanter for paper pot seedlings[J].Biosystems Engineering,2011,110(2):189-197.
[9] 杨丽,苏益明,张东兴,等.玉米纸筒苗移栽机运动轨迹分析与性能试验[J].农业工程学报,2014,30(13):35-42.
[10] 崔巍.旱地钵体苗自动移栽机理论与试验研究[D].北京:中国农业大学,2015.
[11] 周福君,芦杰,杜佳兴,等.玉米钵苗移栽机圆盘式栽植机构参数优化及试验[J].农业工程学报,2014,30(1):18-24.
[12] 王立涛,赵胜雪,滕红英.甜菜机械化纸筒育苗移栽[J].现代化农业,2008(12):1-2.
[13] 那明君,颜世东,杨波,等.玉米纸筒钵苗移栽机输送分苗装置性能研究[J].东北农业大学学报,2016,47(10):51-57.
[14] 周福君,杜佳兴,那明君.玉米纸筒钵苗移栽机的研制与试验[J].东北农业大学学报,2014,45(3):110-116.
[15] 任珂珂,陈海涛,赖庆辉,等.用于甜菜自动移栽机的链式纸钵研究[J].东北农业大学学报,2010,41(12):113-118.
[16] Nambu T,Miyamoto K.Studies of automatic transplanter using chain pot.(Part 4).drop chute type transplanting mechanism and soil flow by furrow opener:Drop chute type transplanting mecha⁃nism and soil flow by furrow opener[J].Journal of Jsam,1993,55:129-136.
[17] 黄潇,邱荷婷,王敬涵,等.响应面法优化抹茶蛋糕卷的制作工艺[J].安徽农业大学学报,2017,144(6):973-979.
[18] 袁孝莲,周桃华,姚大年.地膜覆盖移栽对棉田生态效应及棉花生长发育的影响[J].安徽农业大学学报,2000,27(2):138-140.
[19] 王培培,李冠峰,刘小文,等.我国农业机械化经营模式的分类研究[J].农机化研究,2013,35(4):245-248.
[20] 高玉芝,王君玲,李成华.我国旱地育苗移栽机械化面临的问题及应对措施[J].沈阳农业大学学报,2004,35(2):145-147.
猜你喜欢
中阿科技论坛(中英文)(2021年2期)2021-03-17 02:40:42
林业科技(2020年3期)2021-01-21 08:28:38
江西农业大学学报(2020年6期)2021-01-08 02:35:38
农机化研究(2020年2期)2020-10-17 00:59:16
农机化研究(2019年7期)2019-05-24 09:48:24
农机化研究(2018年8期)2018-07-10 11:39:26
农业工程学报(2018年9期)2018-06-01 08:46:00
黑龙江电力(2017年1期)2017-05-17 04:25:05
中国农业文摘-农业工程(2016年5期)2016-04-12 05:38:02
电测与仪表(2015年4期)2015-04-12 00:43:08