高安全高可靠测速测距系统的设计与实现
2018-05-02 08:00陈文赛
城市轨道交通研究 2018年4期
陈文赛
(南京恩瑞特实业有限公司,211106,南京∥高级工程师)
车载列车自动防护系统是CBTC(基于通信的列车控制)系统的核心安全子系统之一,控制列车安全可靠地运行。通过检测传感器的数据,获得列车当前的运行速度、运行距离以及在线路上某些点的绝对位置等数据信息,从而定位列车和实时计算列车当前位置的安全限速,以实施超速防护,保证列车安全运行。测速测距系统实时地为车载列车自动防护系统提供列车的运行速度、距离、运行方向、空转打滑等信息,是车载列车自动防护系统的重要组成部分,其高可靠性、高安全性是实现车载列车自动防护系统功能和性能的基础。随着无人自动驾驶系统的应用,对测速测距系统的安全性和可靠性提出了更高的要求。
测速测距系统通常使用轮轴转速计(OPG)、多普勒测速雷达、加速度计等传感器,通过结合各传感器的优缺点,采用多路传感器异构融合的测量方式[1-3],实时采集列车的运行速度和运行距离等数据信息。
本文介绍的测速测距系统主要采用2路OPG,实现高精度的测速测距。同时融合雷达传感器信息,消除由于车轮发生空转打滑产生的测量误差。对于测距和定位需求,则在2路OPG和1路测速雷达多传感器融合的基础上,增加与车载应答器接收单元(BTM)的融合;利用OPG和测速雷达的数据融合计算距离,同时根据线路数据信息,通过应答器进行位置修正,以减少距离计算的累积误差[4]。
1 测速测距系统的安全性设计
测速测距系统的开发遵循了城市轨道交通行业普遍使用的V&V(验证和确认)全生命周期开发模型。在系统定义、需求分析、架构和模块设计等阶段进行同步的验证和确认工作;采用SCADE(基于模型驱动的安全开发验证平台)工具进行系统的设计和验证;使用白盒、黑盒和集成测试等方法进行全过程测试;系统风险采用故障树(FTA)、故障模式影响分析(FMECA)、危险及可操作性分析(HAZOP)等方法进行分析。
测速测距系统采用异常防护、CPU与内存检测等方法,对运行中的信息错误、地址错误、应用逻辑异常等情况进行防范。由于车载设备运行环境恶劣,容易受到电磁干扰,采用时间戳与CRC(循环检验码)校验等手段,保证传感器、MVU(测速测距单元)、MPU(主处理板)各个接口之间数据传输的正确性;同时对通信异常设定了容忍时间,在容忍范围内丢弃异常数据。如果异常数据超过容忍值,则视为通信故障。
测速测距系统由2块互为热备的MVU组成,每块MVU上有3路相同的控制模块(处理器采用DSP(数字信号处理器)),分别与车载列车自动防护系统的三取二安全计算机平台的3块MPU通信[5]。MVU与MPU之间采用基于同步脉冲的紧同步策略,MVU上的3个DSP采用独立时钟,并进行任务级同步,进一步保证了系统的安全性和可用性。
测速测距系统对传感器数据进行融合时遵循“故障导向安全”原则,系统三路控制单元分别实时采集和计算各传感器的数据,判断当前数据是否在置信区间内,从而确定传感器是否有异常值;若有持续异常值,则判断此传感器数据故障,并置位此传感器状态位故障,不再使用此故障传感器的数据。若某一控制单元判断2路及以上传感器数据故障,则置此控制单元故障。若存在2路及以上控制单元故障,则置此MVU故障。
2 可靠性设计
2.1 架构可靠性
通常,安全系统采用的结构主要有表决结构、并联结构或表决与并联结构。目前,轨道交通信号系统多使用二取二、三取二、二乘二取二等几种冗余架构。[6]
分别计算出二取二、三取二、二乘二取二、二乘三取二热备的可靠性。假设各单元模块故障服从指数分布,通过MATLAB仿真软件得到几个架构的可靠度曲线[7-8],如图1所示。

图1 架构可靠性比较
通过上述仿真分析可以发现,在系统运行的各个时刻,本系统采用的二乘三取二架构具有最高的可靠度,即其可靠性最高。
2.2 避错容错处理
运行环境变化、硬件故障、电磁干扰和软件中的隐藏错误均会产生系统故障,从而降低可靠性。其中,运行环境变化可通过硬件设计、元器件质量控制等技术避错,硬件故障、电磁干扰和软件错误则可通过故障检测、故障屏蔽及故障恢复等软件技术进行容错处理。本测速测距系统采用2个MVU备份冗余、单个MVU采用三取二、单路DSP采集3路传感器并进行融合和容错处理。
3 测速测距功能实现
3.1 系统功能设计
MVU采用TMS320F2812处理器,实现对各传感器数据的采集、处理及融合,并将处理后的数据报告给主控单元。内置时间处理模块,实时检测输入的2路正交编码脉冲。若时间处理模块采集到2路脉冲的上升沿和下降沿后,产生中断,即可得到单个脉冲的走行时间,从而得到此时列车速度;同时QEP(正交编码电路)通过解码逻辑判断超前的相位以确定列车的运行方向。列车轮对转1圈速度传感器输出N个脉冲,轮对的直径为D,在时间t内采集的脉冲数为n,则当前OPG采集的速度为vopg=。
测速雷达采用多普勒测速,数据通过RS485总线发送给MVU,多普勒频率差为fd,测速雷达发射波的波长为λ,测速雷达视线与地面的夹角为θ,则测速雷达的采集速度为vradar=。
在轨道上每隔一定距离安放一个应答器,BTM(车载应答器接收单元)读取地面应答器数据,并将有效数据发送给MVU,其与MVU采用RS422总线进行通信。
MVU通过对OPG和测速雷达采集的数据进行积分,得到列车的走行距离,同时根据地面上布置的应答器和存储的地图信息,比较列车走行距离和线路数据,判断定位的有效性,并更新列车的位置,从而实现列车的安全定位。
3.2 传感器融合处理
传感器在采集过程中由于各种干扰会采集一些错误数据,需要对其采集的数据进行滤波处理,并结合各传感器特点,采用合理的融合方式得到测速测距结果。图2为MVU数据流示意图。

图2MVU数据流示意图
MVU应用周期为100 ms,对采集的各传感器数据进行计算、处理、融合。其中OPG数据和测速雷达数据每10 ms采集一次,则OPG和测速雷达每周期内有10组数据,根据上周期速度和加速度预测本周起速度范围,对10组数据进行可信判断,去除置信区间外的数据,提高数据的可靠性,并得到本周期此传感器的原始速度、距离、方向等信息。
OPG和测速雷达的原始数据进过滤波后,对置信区间内的数据进行处理。考虑列车的惯性,OPG和测速雷达的速度计算公式如下:

式中:
vOPG1——OPG1实时计算的速度;
vc1——本周期OPG1采集的速度;
A1——OPG1加速度;
T——MVU处理周期;
β11、β12、β13——系数,β11+β12+β13=1;
vOPG2——OPG2实时计算的速度;
vc2——本周期OPG2采集的速度;
A2——OPG2加速度;
β21、β22、β23——系数,β21+β22+β23=1;
vradar——测速雷达实时计算的速度;
vc——为本周期测速雷达采集的速度;
A3——测速雷达加速度;
β31、β32、β33——系数,β31+β32+β33=1;
v——计算列车速度;
γ0、γ1、γ2、γ3——系数,γ0+γ1+γ2+γ3=1;
k——第k个计算周期。
各参数选取与传感器性能、测速误差、数据可信度等相关。
3.3 系统故障处理
(1)系统故障。分为单点故障和共模故障。单点故障为单个单元故障,如系统中某个模块的元器件故障,不影响其他模块工作。本系统采取二乘三取二架构,单点故障不影响其他几个单元,系统仍可正常工作。共模故障指单个原因引起的系统多个单元发生故障模式相同的失效,且各失效之间没有因果关系,一般由设计、环境、人为因素等造成,如电磁干扰会造成OPG采集产生尖峰脉冲、水面造成雷达测速无效等。系统采用多传感器融合方式,实时检测各传感器状态,若单个传感器采集故障,可利用其它传感器进行测速测距。对于环境和人为因素,系统采用电磁屏蔽、各DSP独立设置运行时钟异步运行采用任务级同步等手段来防护共模故障。
(2)测速雷达故障。根据测速雷达报文判断是否存在通信异常、无有效数据、无有效方向等故障,并根据列车运行趋势判断数据是否合理。在低速情况下,鉴于其采用的多普勒原理,此时雷达测量的数据误差较大,在此情况下视为故障,不采用此数据。
(3)OPG故障。对于OPG,根据列车运行趋势和有效测速雷达数据判断其是否存在尖脉冲干扰、空转打滑、锁定、速度距离计算不一致等异常情况,并在合理范围内进行异常处理、滤波。
(4)BTM故障。对于BTM,根据BTM报文判断是否存在通信异常、BTM状态错误、版本号错误等故障,并根据地图信息判断BTM返回数据的可信性。
(5)数据融合。对于经过异常判断的传感器采集数据,每周期进行速度融合时,判断两两之间速度差是否在合理范围内,对不合理数据进行标记,若连续错误则视为此传感器故障。方向融合时,判断是否有传感器方向不合理,并进行标记,连续错误则视为传感器故障。距离融合时,若2路OPG正常运行,对于2路OPG采集的距离进行比较,若这2路相差过大,分别与雷达速度积分的距离进行比较,若合理则采用本OPG数据,否则认为数据采集故障。
(6)DSP故障。3路DSP分别计算完数据后,向其他2路发送计算后的数据。3路DSP数据进行容差处理,判断数据是否合理,并对不合理的DSP进行标记。若连续故障,则判断此路DSP故障。
3.4 SCADE开发
本系统针对测速测距模块采用SCADE进行设计实现。SCADE是基于模型驱动的安全开发验证平台,过程覆盖从需求到代码实现的整个生命周
期[9-10]。
(1)SCADE建模。本系统采用数据流图和安全状态机2种方式进行建模,对建立的模型采用SACDE用semantic checker进行静态分析。代码生成采用KCG生成器,已通过SIL4安全认证,满足测速测距系统的安全需求,可直接嵌入至系统中。本系统对传感器数据处理、融合、空转打滑处理、定位处理等安全功能采用SCADE进行建模。图3为OPG处理SCADE状态图。
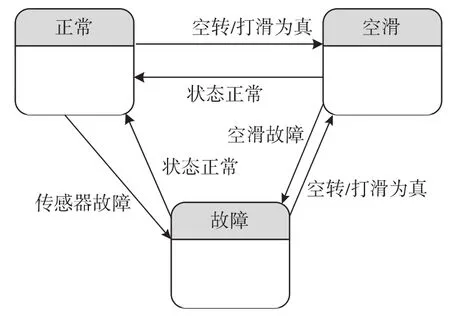
图3OPG处理SCADE状态图
(2)形式化验证。Design Verifier是根据一定的机制遍历SCADE模型的所有输入,判断系统是否满足预先设定的安全条件。测试案例不能保证模型在安全上的正确性,而Design Verifier具有安全验证完整性。通过设置系统指定的安全属性,验证模型是否满足此属性。若模型安全,验证器输出安全证明,否则输出一个反例警告。其验证公式为:{输入}{模型}{输出}{安全需求功能断言}{安全例证}。例如:对于三取二模块,3路DSP采集的数据可能存在一定的误差,但是误差应在一个比较小的阈值范围内。若某路速度计算与其他2路速度相差过大,则认为此DSP数据计算错误,置为故障。其需要满足的安全需求为:若某路DSP数据与其他2路计算数据相差在阈值范围之外,则此路DSP置为故障。将此功能需求加入验证模型中进行验证,其结果为有效。
(3)覆盖率测试。为提高系统的功能安全,采用MC/DC(Modified Condition/Decision Coverage)方法进行结构覆盖率分析,可满足欧洲标准EN 50128对单元测试覆盖率(同时使用分支和组合条件覆盖)的要求。MC/DC是满足全局的准则,针对每一个布尔表达式。定位功能覆盖率分析如图4所示。
3.5 系统实现
经过对测速测距系统板卡的器件进行可靠性分析,单块MVU板的失效率为9.003 16×10-6,可靠性为12.679 46(年);2块MVU板热备后,本测速测距系统的可靠性为58 699.608 8(年)。
系统在硬件和软件均按照安全相关标准进行安全性设计,已通过SIL4级安全认证。哈尔滨轨道交通3号线空转打滑处理结果如图4所示。

图4 哈尔滨轨道交通3号线空转打滑处理结果
4 结语
安全性设计和可靠性设计是决定测速测距系统性能的关键环节。相对目前主流的三取二、二乘二取二冗余结构,本测速测距系统采用二乘三取二结构,在可靠性和安全性指标上具有更明显的优势。同时采用多传感器异构融合的测速测距算法,使系统能适应各种运行场景。
该测速测距系统在架构设计、模块设计、接口设计中综合运用了多种安全设计技术、故障处理,使本系统达到了SIL4的要求,通过了第三方独立评估机构的安全认证,并在哈尔滨轨道交通3号线一期工程中得到成功应用。
[1] 周达天.基于多传感器信息融合的列车定位方法研究[D].北京:北京交通大学,2007.
[2] 刘江,蔡伯根,王剑,等.基于灰色理论的列车组合定位轮径校准方法研究[J].铁道学报,2011,33(5):54.
[3] 蔡煊,王长林,林颖.基于轮轴速度传感器和加速度传感器的混合测速测距算法研究[J].城市轨道交通研究,2015,18(3):32.
[4] 牛道恒,刘岭,崔俊锋,等.高速列车测速测距系统滤波模型与融合策略研究[J]铁路通信信号工程技术,2011,8(4):8.
[5]陈文赛.一种高可靠、高安全性系统——三取二计算机系统[J].现代雷达,2004,26(6):19.
[6] 王悉,马连川,袁彬彬.2取2乘2安全计算机平台的设计与实现[J].都市快轨交通,2011,24(4):17.
[7] 高继祥,郑俊杰.双机热备计算机联锁系统可靠性与安全性指标分析[J]北方交通大学学报.1998,22(5):73.
[8] 马连川,穆建成.四模冗余结构在铁路信号控制系统中的应用[J].兰州交通大学学报(自然科学版).2005,24(3):106.
[9]李俊杰.基于SCADE的定位系统设计及验证[D].四川:西南交通大学,2014.
[10]张路.基于SCADE的CBTC区域控制器软件开发[D].北京:北京交通大学,2010.
猜你喜欢
小猕猴智力画刊(2022年4期)2022-05-25
小哥白尼(趣味科学)(2021年4期)2021-07-28
云南画报(2021年4期)2021-07-22
中学生百科·大语文(2021年4期)2021-05-12
科学(2020年3期)2020-01-06
小学生学习指导(低年级)(2019年6期)2019-07-22
电子制作(2017年7期)2017-06-05
发明与创新(2016年5期)2016-08-21
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
中国火炬(2014年11期)2014-07-25