永磁同步直驱电机悬挂模式研究*
2018-05-02 08:00:33罗湘萍张文超吴凯桦
城市轨道交通研究 2018年4期
罗湘萍 张文超 吴凯桦
(同济大学铁道与城市轨道交通研究院,201804,上海∥第一作者,副教授)
传统异步交流电机输出特性与轮对需求不匹配,需设置变速箱作为中间传动环节对力矩和速度进行调整。该机械环节带来了能量传递损耗、质量和噪声增加等一系列问题。而永磁同步电机具有体积小、质量轻、功率密度大、低速输出转矩大、效率高、维护简单等优点,其输出特性适用于直驱模式。采用永磁同步电机直接轮驱或轴驱,可取消变速箱,简化动力驱动系统,减少效率损失,降低维护量和传动噪声。永磁直驱电机替代传统异步电机实现传动系统升级正成为技术发展的趋势。
永磁同步直驱电机悬挂有多种模式,其中最主要的是架悬和轴悬模式。永磁同步直驱电机轴悬模式下的电机质量全部由车轴承担,属簧下质量。永磁同步直驱电机架悬模式下的电机悬挂于构架上,输出力矩通过独立空心轴传递至车轴,电机质量由构架完全承担,属簧上质量。驱动装置质量分配于簧下的量级直接影响轨道交通车辆高速运行时的振动冲击及噪声大小。
本文针对下一代140 km/h城市轨道交通车辆,在相同线路条件和运行速度下,就永磁同步直驱电机架悬和轴悬2种技术模式进行轮轨垂向冲击作用力计算分析,以作用力指标确定永磁同步直驱电机悬挂优选方案。
1 永磁同步直驱电机悬挂模式
(1)永磁同步直驱电机轴悬模式。德国西门子公司2007年研发了新一代城市轨道交通车辆转向架Syntegra(见图1)。Syntegra转向架采用永磁同步电机轴悬直驱方式,电机转子即车轴,电机转矩直接施加在车轴上,传动效率高。轴箱与电机定子采用一体化设计,轴箱内置,电机定子与轴箱共用1对一体式轴承,驱动装置没有其他附加机构,结构较为简单。为了保持转子与定子之间的小气隙,需要转子轴有足够的刚度,因而车轴直径较大,显著增加了簧下质量。
(2)永磁同步直驱电机架悬模式。德国在高速列车上也成功试验了永磁电机直驱技术。早期在ICE3的技术要求和规格基础上研制了2台永磁同步电机驱动单元,将其用弹性悬挂的方式安装在构架上(见图2),电机输出转矩通过第一六连杆、锥形空心轴、第二六连杆、法兰传递至车轴。各环节均采用弹性联接,加上锥形空心轴的使用,使得整套驱动装置具有一定的动态变位能力。空心轴六连杆机构的径向刚度较大,转动过程中的偏心很小,但结构复杂,制造及维修成本较高。

图1 德国永磁同步电机轴悬结构图[1]
轴悬和架悬模式各有其优缺点,本文的重点旨在分析不同悬挂模式对轮轨垂向作用力的影响。根据这两种悬挂模式簧上簧下不同的质量分布,建立相应的轮轨垂向冲击作用力计算模型,分析在相同线路条件和运行速度下的轮轨垂向作用力。
2 轮轨滚动接触瞬态计算建模
道岔、轨缝、波磨、轮对的多边形磨耗等因素都将引起轮轨垂向冲击作用。分析不同永磁同步直驱电机悬挂模式对垂向作用力的影响只需在诸多因素中选择1种因素作为分析基准即可。
随着轨道交通的发展,为了降低轮轨冲击力,减小振动冲击噪声,焊接无缝钢轨已得到广泛应用;波磨、轮对多边形磨耗等属于后期运行中产生的局部病害,可通过打磨和镟轮加以控制。道岔是轨道交通线路的关键设备,不可或缺。高速铁路道岔采用可动岔心,消除了有害空间,而城市轨道交通线路采用的道岔均为普通道岔,客观上存在物理有害空间。故选择考量轨道交通车辆直线全速通过道岔时车轮与道岔间的垂向作用力对论证永磁同步电机直驱模式的可用性和适用性具有普遍参照意义。
2.1 轮轨滚动接触有限元模型
由于轮轨系统相对轮对中心线所处的垂向平面具有对称性,故只建立单轮单轨的垂向模型。
依据车轮踏面和道岔结构,利用HyperMesh前处理软件,采用实体单元对结构进行有限元网格建模。在HyperMesh中施加约束和载荷后,再导出至Ls-dyna软件中解算,由Ls-dyna软件进行后处理得到分析结果。轨缝模型,如图3所示。其中车轮采用LMA型踏面,钢轨使用60 kg/m钢轨。
在有限元建模中,将轨道交通车辆簧上质量简化为一个质点通过一系悬挂在轴箱处与轮对相连,以质量点代替簧上质量。永磁同步电机轴悬直驱时,簧下质量相对于永磁同步电机架悬直驱时增加了电机自身质量。通过分配不同的簧上簧下质量来实现不同悬挂模式的参数建立。
2.2 轮轨滚动接触计算模型验证
钢轨接头是铁路线路3大薄弱环节之一。20世纪七八十年代以来,国内外相关机构对轨道交通车辆车轮通过钢轨接头冲击进行了实测,获得了具有参考价值的车轮过钢轨接头轮轨力变化曲线[3]。采用单车轮过轨缝的仿真结果与实测结果进行对比,验证所采用的研究方法是否能够准确模拟车轮通过道岔的瞬态行为。
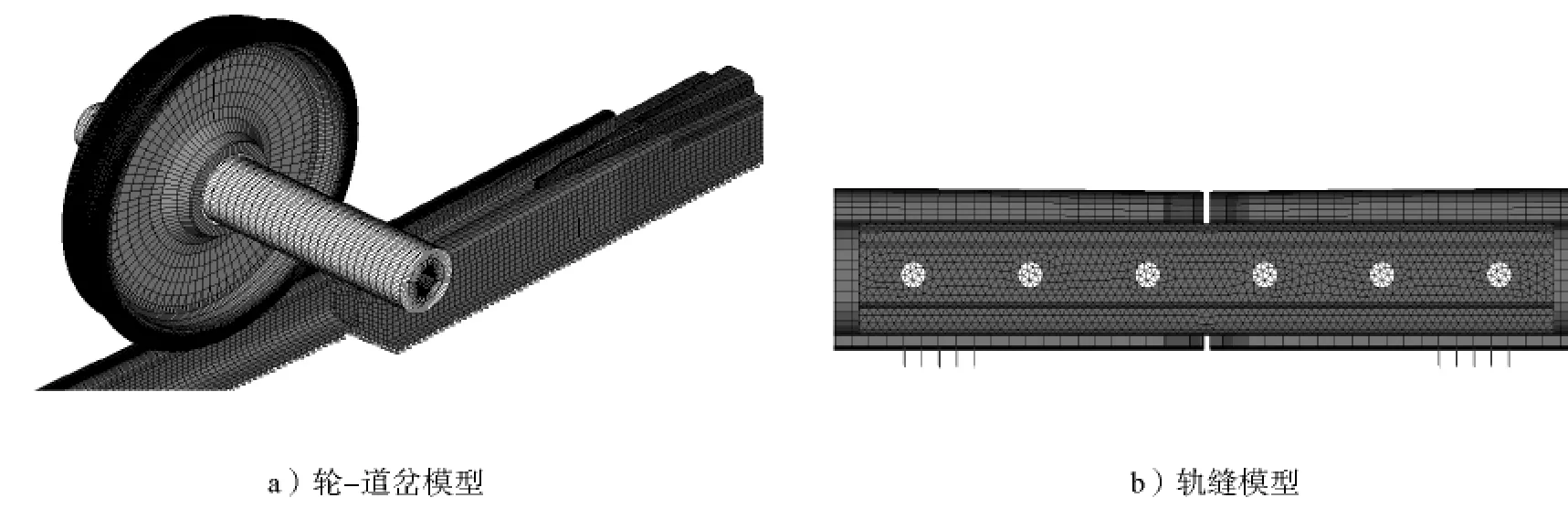
图3 轮轨瞬态滚动接触有限元模型
采用单轮模型,将轨道由道岔更替为带轨缝的单边钢轨,有限元模型如图3a)所示。
计算过程对车轮施加初始运动速度,将获得瞬时显式解的冲击计算结果(见图4 a))与轮轨实测结果[3](见图 4 b))对比。由此可见,利用 LS-Dyna软件以显式时间积分方法求解所得的轮轨垂向接触力与文献[3]的轮轨实测结果变化规律基本一致。
3 轮轨滚动接触瞬态计算结果与分析

图4 单车轮过轨缝计算结果与实测结果对比图
3.1 轮轨滚动接触计算工况
通过考察轨道交通车辆以不同速度等级通过道岔辙叉区时车轮与轨道间的垂向冲击力,来研究论证永磁同步电机直驱模式选择。分析轮轨瞬态接触时,车辆运行速度设为80 km/h、100 km/h、120 km/h、140 km/h共4个等级,计算结果见表1。

表1 不同速度下轮轨滚动接触瞬态垂向力
3.2 轮轨滚动接触计算结果与分析
采用上述模型计算不同工况得到轮轨接触瞬态响应结果见表1,典型工况结果见图5。
结合图5及表1的数据可知:
(1)车轮以一定速度通过辙叉区的有害空间时,会产生较大的轮轨垂向冲击力。不论采用何种驱动模式,冲击力大小会随着速度的提高明显增大。
(2)当车辆运行速度为80 km/h时,永磁电机架悬模式下,轮轨间的最大垂向作用力为213.5 kN;永磁电机轴悬模式下,轮轨间的最大垂向作用力为255.7 kN,两者相差并不显著。
(3)当车辆运行速度为140 km/h时,永磁电机架悬模式下,轮轨间的最大垂向作用力为329.4 kN;永磁电机轴悬模式下,轮轨间的最大垂向作用力为433.3 kN,两者相差较大。

图5 永磁同步电机架悬与轴悬直驱轮轨垂向力
(4)从轮轨冲击力角度分析,80 km/h速度等级下,这两种模式均可采用,但轴悬模式的转子轴永磁体处于簧下,将受到的较大振动冲击,存在易退磁的风险。
(5)随着运行速度提高,永磁电机架悬模式的轮轨垂向作用力比轴悬模式的小,且转子轴永磁体处于簧上,受振动冲击退磁的风险也小。故本文推荐下一代140 km/h城市轨道交通车辆选择采用永磁电机架悬直驱技术方案。
4 结论
本文建立了基于轮对踏面外形和道岔结构的轮轨冲击力学模型,通过分析轨道交通车辆直线通过道岔时电机不同悬挂方式下的轮轨垂向作用力,优选适用于不同速度等级下的永磁同步电机悬挂方案。当运行速度较低时,综合考虑电机悬挂结构复杂度与轮轨作用力,优选轴悬直驱作为电机悬挂方案;当运行速度较高时,主要考虑轮轨作用力及永磁体受振动冲击退磁的风险度,优选架悬直驱作为电机悬挂方案。
[ 1] ANDREAS J,LARS L,MARTIN T.Syntegra○R-:Innovatives Triebfahrwerk mit Direktantrieben=Syntegra-:Innovative motor bogie technology with direct drives[J].Zev Rail Glasers Annalen,2006,130(9):1.
[2] CKEL A J.Intra Ice a novel direct drive system for future high speed trains [J].Zev Rail Glasers Annalen,2007,110(8):1.
[3] 李定清.轮轨垂直相互动力作用及其动力响应[J].铁道学报,1987(1):1.
[4] 闻方宇,任尊松,孙守光,等.基于ANSYS/DYNA软件的高速车轮通过道岔的轮轨动力研究[J].铁道学报,2014(3):14.
猜你喜欢
防爆电机(2020年6期)2020-12-14 07:16:54
铁道通信信号(2020年10期)2020-02-07 01:01:02
光学精密工程(2016年3期)2016-11-07 09:03:49
中学生数理化·高三版(2016年2期)2016-09-10 07:22:44
铁道通信信号(2016年6期)2016-06-01 12:10:20
中国铁道科学(2015年5期)2015-06-21 06:53:22
大电机技术(2015年5期)2015-02-27 08:22:28
中国卫生(2014年5期)2014-11-10 02:11:32
中国铁道科学(2014年1期)2014-06-21 06:34:12
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54