
基于V2G充电桩系统DC—DC变换器控制策略的研究
2018-04-29 07:54余帅刘胜永崔志鹏曹括周冀龙
广西科技大学学报 2018年1期
余帅 刘胜永 崔志鹏 曹括 周冀龙

摘 要:V2G系统中,对锂电池充放电比较频繁,锂电池的充电电压、电流值对锂电池的充电速度及其使用寿命有很大影响.针对V2G系统传统的DC-DC变换器控制策略虽能实现对锂电池的充电,其对锂电池充电时,响应的电压、电流值达到稳态值较慢、稳态误差较大,以致存在大大增加充电时间、降低锂电池的使用寿命等缺点,提出了一种对DC-DC变换器的模糊PI控制策略,该策略通过模糊控制可对PI参数进行整定,以减小稳态误差,缩短充电电压、电流值达到稳态所用的调节时间,从而提高锂电池的使用寿命、在电网负荷较小时能够将更多电能储存在锂电池中,使V2G系统更好地实现移峰填谷、节约资源.实验结果表明,该策略能够有效减小锂电池充放电的稳态误差及达到稳态值所用调节时间.
关键词:V2G充电桩;DC-DC变换器;模糊PI控制
中图分类号:TM76 DOI:10.16375/j.cnki.cn45-1395/t.2018.01.012
0 引言
Vehicle-to-grid(V2G)系统能够实现电动汽车与电网之间的互动,它既能实现电网的移峰填谷,减小电网的建设投资,又能降低电动汽车的使用成本[1].V2G系统的核心思想是实现电动汽车与电网之间的电能互动,当电网负荷较小时,通过电动汽车储存过剩的电能;当电网负荷较大时,可通过电动汽车储存的电能反馈于电网.它在电力系统的调节峰值功率、削峰填谷等方面有很强的优势[1].电网的负荷在不断发生变化, V2G系统中的锂电池会进行频繁地充放电,所以,对锂电池充电时,既需要充电快速,使电网过剩电能可以更多储存于锂电池,又需要充电过程对锂电池使用寿命损耗小,从而节约资源,提高V2G系统调节电网能力.文献[2]分析了温度、充放电电流、充放电截止电压等因素对电池寿命的影响;文献[3]中介绍了当今的锂电池的各种充电方法都以最佳充电曲线作为基础来展开的,最佳充电曲线描述了随着充电进行,最佳充电电流呈现指数下降的趋势.在充电过程中,若是充电电流高出最佳充电电流曲线,不但无法提高充电速度,反而会使电池温度升高,损耗电池寿命;若是充电电流低于此最佳充电曲线,虽然不会对电池构成损伤,但由于充电电流降低,会降慢电池充电速度.以此,不管通过何种充电方式,都需要DC-DC变换器输出的充电电压、电流值调节速度快且精确,不然势必降低锂电池充电速度及锂电池的使用寿命.文献[4-5]中的DC-DC变换器都采用的传统PI控制策略,其PI值固定,在充电电压、电流需要改变时,其响应速度比较慢、稳态误差也较大.
本文结合V2G系统及锂电池充放电等特点,选取了一种能够实现电能双向流动的电路拓扑结构,设计了一种模糊PI控制策略.该控制策略与传统PI控制策略相比,能够通过模糊控制对PI参数进行整定,从而缩短充电电压调节时间、减小稳态误差,提高了DC-DC变换器对锂电池的充电速度,降低了对锂电池的损耗,增强了V2G系统节约资源、调节电网的能力.
1 DC-DC变换器拓扑结构选择及其工作原理分析
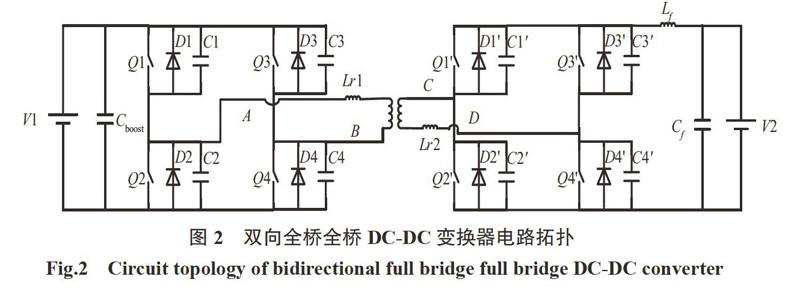
V2G系统示意图如图1所示,当电网负荷较小时,电网把过剩的电能通过充电桩储存在电动汽车锂电池中;当负荷较大时,锂电池中存储的电能可以通过充电桩反馈到电网.充电桩要能够实现电能双向流动,一般锂电池充电电压至少在110 V~500 V,电流在1 A~200 A,结合V2G系统充电桩以上特点,本文选用双向全桥DC-DC变换器拓扑结构,其适用于中大功率且具有电气隔离.当电网负荷较小时,变换器工作在移相全桥拓扑结构,对锂电池进行充电,可通过控制移相角大小来控制其输出电压.当电网负荷过大时,变换器工作在全桥Boost结构,通过控制占空比控制其输出电压.拓扑结构如图2所示. V1表示拓扑工作在正向充电时,DC-DC变换器的输入电压;V2表示拓扑工作在馈电时,锂电池向DC-DC变换器输入的电压.
移相全桥部分工作波形图如图3所示,其中ip为原边电流,ilf为副边电感电流,VAB为变压器原边电压,V0为副边整流输出电压,Vcn(n =1, …, 4)表示电容电压,T为开关周期,td为开关管之间的死区时间,d为占空比,φ为移相角,deff表示有效占空比,dloss表示占空比丢失所占半个周期的比例.
由于开关周期的对称性,这里只对t0~t6时间段进行分析,t0时刻,ilf下降到最小值,ip通过变压器向负载锂电池供电.t1时刻,开关管Q1关断,ip向电容C1充电并使C2放电.由于C1和C2,Q1为零电压关断. t2时刻,C2电压下降到0,Q2零电压导通. t3时刻,Q4关断,ip转移到C3和C4支路,使C3放电并使C4充电,Q4为零电压关断. t4时刻,C3电压下降到0,Q3零电压导通,整流二极管D2导通. t5时刻,ip下降到0. t6时刻,ip足以提供负载电流, D5,D8截至,电路开始进入下半个周期.其中阴影部分表示由于变压器漏感的作用,原边不足以提供负载电流、负载处于续流状态的持续,导致副边整流电压丢失[6].
由其工作过程,取电感电流ilf和电容电压Vcf为状态变量,可得其分段线性状态方程[7]:
3 DC-DC变换器的控制策略设计
3.1 模糊PI控制策略
DC-DC变换器的后级是电动汽车的锂电池,当电网负荷较大,电网对锂电池充电,变换器输出电压值要做到可控,选用传统闭环PI控制,可实现输出电压可控.传统PI控制系统通过设定PI值来减小误差偏差,但由于PI值固定,其输出电压的调节时间较长,稳态误差亦有可能较大.
为使输出直流电压与理想输出电压值更加接近,达到稳定时间更短,可以加入模糊控制算法对PI参数进行实时整定,控制系统框图如图5所示. 此模糊PI控制系统,控制量是移相角φ、输出量为副边整流电压V0,主要通过对实际输出电压与理想电压的差值来对PI参数进行整定,差值较大时,可以通过模糊控制来适当的对P值增大;差值较小时,适当减小P值. 当差值变化率减小时,通過模糊控制适当减小I值;差值变化率增大时,适当增大I值,从而使前级移相角的调整更加有利于输出理想电压. 此控制策略输出电压较传统PI控制达到稳定时所用时间更短,输出的稳定电压值更加理想.
3.2 模糊PI控制器设计
本文模糊PI控制系统是建立在PI控制的基础上,模糊控制部分是通过输出电压与理想电压的差值与差值变化率来决定模糊控制的输入输出变量.对其模糊语言变量及其隶属函数进行设计:设输入变量E,ED及输出变量△P,△I的模糊子集都为{NA,NB,NC,OA,PA,PB,PC}.E的子集区间由所需充电电压的范围来确定,ED的子集区间与E子集区间按照一定的比例关系确定;△P,△I的模糊子集区间由原始PI参数值按照一定比例确定.通过多次试验结合理论经验,设计出△P,△I的模糊规则,如表1、表2所示.
4 仿真实验验证与结果分析
4.1 变换器参数设计
针对正向充电的移相全桥ZVS过程及模糊PI控制算法,结合V2G系统及锂电池相关信息,设计参数如下:输入直流电压V1=309 V,锂电池充电电压范围在0~260 V,變压器变比n=1,电感电流范围在0 ~10 A,开关频率fs=20 kHz,漏感值Lr=40 μH,电感Lf =47 μH,锂电池阻值R=0.1 Ω,电感阻值RL=0.27 Ω,电容阻值RC =0.2 Ω,馈电时整流输出电压Vf . 根据式(3)可以得到具体的移相全桥ZVS的传递函数. 模糊控制部分,各语言变量论域设计为:E ={-2.7,-1.8,-0.9,0,0.9,1.8,2.7},ED ={-0.000 3, -0.000 2,-0.000 1,
0,0.000 1,0.000 2,0.000 3},ΔP={-0.001 0,-0.000 6,-0.000 3,0,0.000 3,0.000 6,1.000 0},ΔI={-0.000 10,-0.000 06,-0.000 03,0,0.000 03,0.000 06,0.000 10}.各模糊子集均采用连续型三角函数.仿真中,可以改变理想电压值的大小,来实现不同的充电策略,但不论何种充电策略,对电压、电流的调节时间及准确值都有很高要求.
4.2 双向DC-DC变换器仿真实验
结合上面给定参数及模糊PI控制规则,建立仿真模型,当电网负荷比较大时,电网对电动汽车充电,采用260 V恒压充电时,可得出在PI控制下的输出波形图与在模糊PI控制下的输出直流电压波形图,图6为PI控制输出V0波形图,图7为模糊PI控制输出V0波形图, PI控制、模糊PI控制都可以使其输出稳态误差逐渐减小,但由于模糊PI控制可以整定P,I值所以模糊PI控制输出电压响应更快,实时充电电压更接近理想电压值,消除稳态误差速度也更快. 由图6、图7比较可知,模糊PI控制输出波形与理想电压值更接近.对锂电池充电而言,过小的电压值会降低充电速度,过大电压会使锂电池使用寿命受损. 因此,采用模糊PI控制对锂电池充电非常有利.
为比较电压响应速度与准确度,改变充电理想电压值,使其随时间的变化而变化,文献[9]中介绍了一般的锂电池充电策略的电压波形图,在仿真实验中,改变理想电压波形使其与一般锂电池充电电压波形相似,可得仿真结果波形如图8所示,模糊PI控制策略输出充电电压与理想电压非常接近,因此,模糊PI控制策略更能满足不同充电策略对充电电压响应速度及准确度的要求.
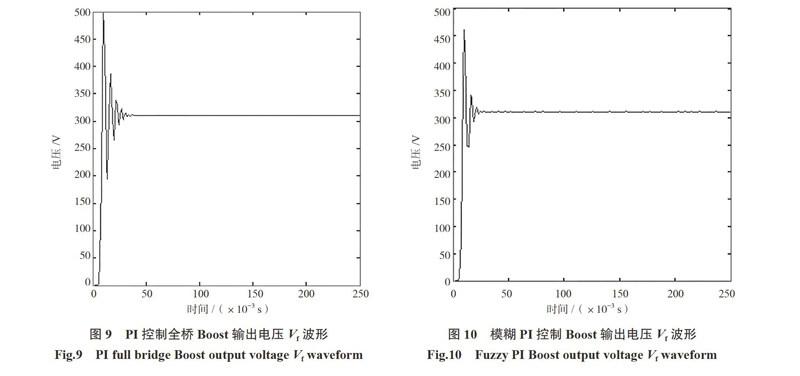
同理,对于馈电时的全桥Boost模型,采用模糊PI控制策略,使电动汽车中锂电池的电能可以反馈到前级AC-DC变换器.根据上面参数,在MATLAB中建立仿真对应的我们可以得到相应的相应simulink仿真输出电压波形图,图9为PI控制馈电输出整流电压Vf波形图,图10为模糊PI控制馈电输出整理电压Vf 波形图,两者输出稳态电压皆与理想电压值接近,满足要求,进行对比可知模糊PI控制反馈输出电压Vf 波动较小,在实际的变换器设计中,也能减小滤波电容的容量,从而使变换器的体积更加轻巧.
4.3 仿真实验结果分析
通过对比图6与图7的波形图,可知本文设计模糊PI控制策略输出电压在此仿真实验中稳态误差较传统控制策略大约减小了[(260-256)-(260-258)]×100%/(260-256)=50%左右.对比图8中的3种波形,假设充电电能全部转换为锂电池中的电能,相同充电时刻锂电池的阻值相同,由公式电能E=U2*t/R,可知,在相同的时间内此仿真实验中模糊PI控制策略对锂电池充电的电量更大,较传统PI控制大概提高15%左右.那么在V2G系统中,相同的时间就能够给更多的电池充电且损耗小,从而节约了能源,且有更多的电能可以用于调节电网.在做仿真实验时,不同的充电电压与理想电压之间的压差与压差的变化率是不同的,因此要想使调节时间更短、输出波形更加理想,对输入输出隶属度函数阈值及输入输出模糊值比例的设计应该进行多次实验,找出更加理想的隶属度函数,这样模糊控制对PI参数的整定会更加理想.
5 结论
本文基于V2G充电桩系统的DC-DC变换器的特点及在系统中的用途,选取了一种电能可双向流动的全桥DC-DC变换器拓扑,对其工作过程进行了叙述,简单讲解了其小信号模型,以移相角及输出电压为对象,设计了一种模糊PI控制策略,并通过simulink仿真实验,得出模糊PI控制策略较传统PI控制策略可以更快速地达到满足要求输出电压、减小稳态误差,更能够满足V2G充电桩中DC-DC变换器对输出电压响应快、精确度高的要求,从而提高了V2G系统节约资源、调节电网的能力.
参考文献
[1]刘晓飞,张千帆,崔淑梅.电动汽车V2G技术综述[J].电工技术学报,2012,27(2):121-127.
[2]李广地,吕浩华,袁军,等.动力锂电池的寿命研究综述[J].电源技术,2016,40(6):1312-1314.
[3]徐磊.动力锂电池充电技术研究[D].太原:太原科技大学,2014.
[4]吴晓光,羊彦.双闭环反馈控制半桥DC-DC变换器设计[J].电子设计工程,2014,22(16):100-102.
[5]徐凌.基于双闭环PI控制的单相全桥PWM整流控制器的研究[J]. 电工技术, 2015(1):90-91.
[6]马俊龙.移相控制的ZVSPWMDC/DC全桥变换器的占空比丢失研究[J].科技信息,2011(1):101-129.
[7]皮之军.移相全桥ZVS变换器及其数字控制技术研究[D].武汉:华中科技大学,2006.
[8]解光军,程心.DC-DC开关变换器的建模与设计[M].北京:科学出版社,2015.
[9]何秋生,徐磊,吳雪雪.锂电池充电技术综述[J].电源技术,2013,37(8):1464-1466.
Abstract: Vehicle-to-grid (V2G) technology can realize the interaction between the electric vehicle and the grid. It can not only realize the peak load shifting of the power grid, reduce the construction investment of the power grid, but also reduce the use cost of electric vehicles. In the V2G system, the charge and discharge of the lithium battery are more frequent. The charging voltage and current value of the lithium battery have great influence on the charging speed and the service life of the lithium battery. Though the traditional DC-DC converter control strategy can realize the charging of lithium battery, the slow response of the voltage and current value to the steady state value and great steady-state error will greatly increase the charging time and reduce the service life of the lithium battery, this paper proposes a fuzzy PI to DC-DC converter control strategy, which is adopted by the fuzzy control to adjust PI parameters to reduce the steady-state error and shorten the time that the charging voltage and current value reach the steady state, thereby improving the service life of the lithium battery, enabling the lithium battery to store more energy when the power grid load is smaller, the V2G system to achieve the better peak load shifting. The experimental results show that the proposed method can effectively reduce the steady-state error of charge and discharge of lithium battery and the time to reach the steady-state value.
Key words: V2G charging pile; DC-DC converter; fuzzy PI control
(学科编辑:张玉凤)
